14-6简谐运动的合成 第十四章机械振动 两个同方向同频率简谐运动的合成 这4o以t x=x+X2 x=Acos(at+o) X2 x Xx A=V4+45+2A4cos(p2-p) A sin +42 sin p2 两个同方向同频 tan o 率简谐运动合成 4 coso+42 cosz 后仍为简谐运动
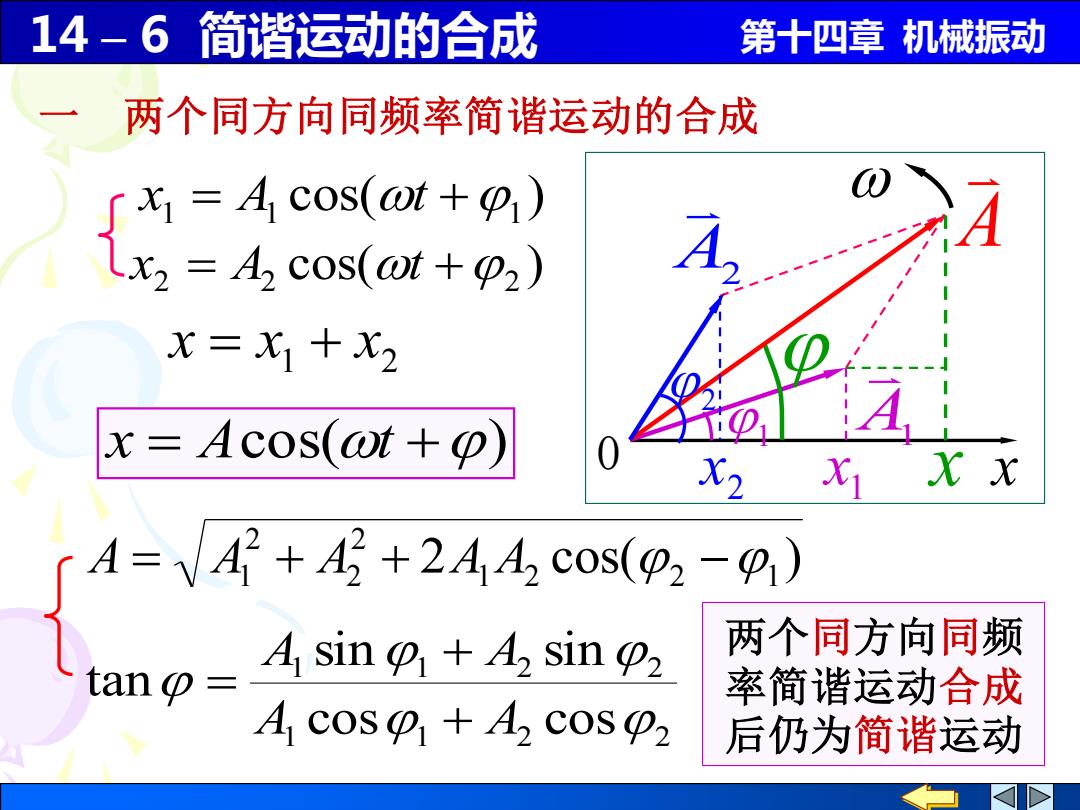
14 – 6 简谐运动的合成 第十四章 机械振动 1 A1 1 x x 0 一 两个同方向同频率简谐运动的合成 1 2 x = x + x 1 1 2 2 1 1 2 2 cos cos sin sin tan A A A A + + = 2 cos( ) 1 2 2 1 2 2 2 A = A1 + A + A A − x = Acos(t +) cos( ) 1 = 1 +1 x A t cos( ) 2 = 2 +2 x A t A x2 x A2 2 两个同方向同频 率简谐运动合成 后仍为简谐运动
14-6简谐运动的合成 第十四章机械振动 讨论 A=A2+2+244 cos(22-) 1) 相位差△p=P2-91=2kπ(k=0,±1,±2,…) X ∫A=A+A x=(A+4)cos(at+) p=p2=9,+2k元
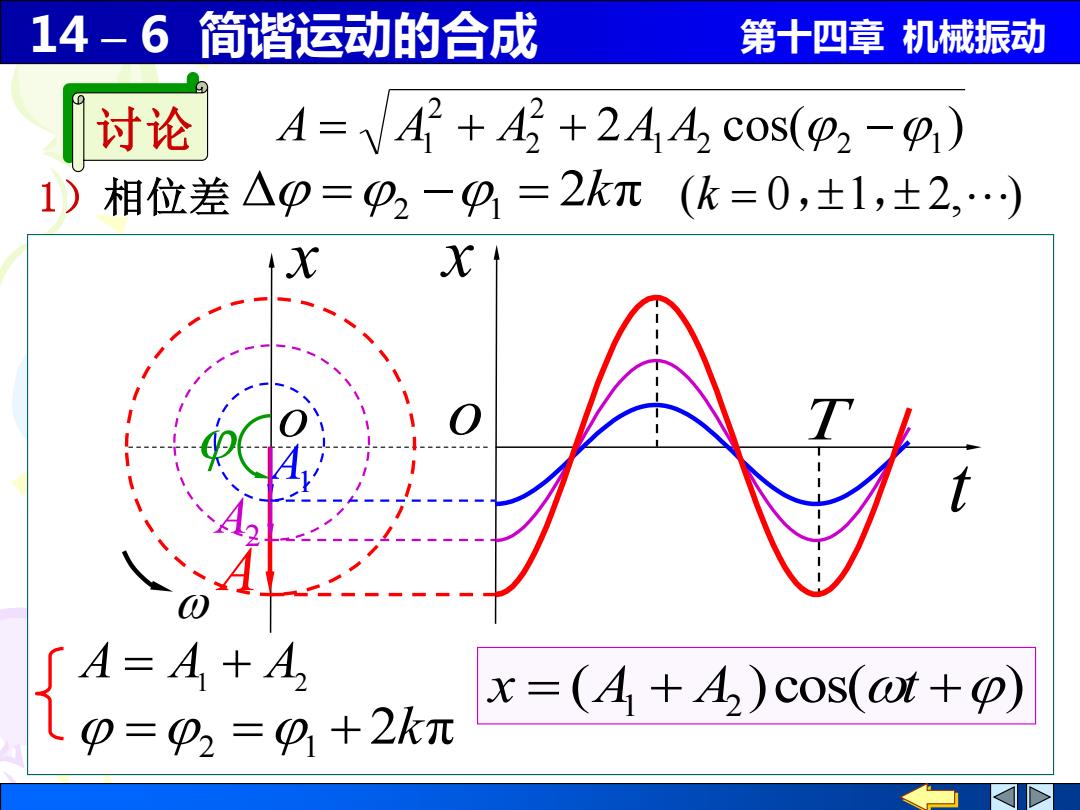
14 – 6 简谐运动的合成 第十四章 机械振动 x x t o o =2 =1 + 2kπ ( )cos( ) x = A1 + A2 t + A A = A1 + A2 A1 A2 T 1)相位差 =2 −1 = 2kπ (k = 0,1, 2, ) 2 cos( ) 1 2 2 1 2 2 2 讨论 A = A1 + A + A A −
14-6简谐运动的合成 第十四章机械振动 A=42+42+244 cos(2-) 2)相位差△p=92-91=(2k+1)m(k=0,±1,) x=A cosot X2=A,cos(ot+π) x=(A,2-A)cos(@t+π) x X ∫A=A1-A2
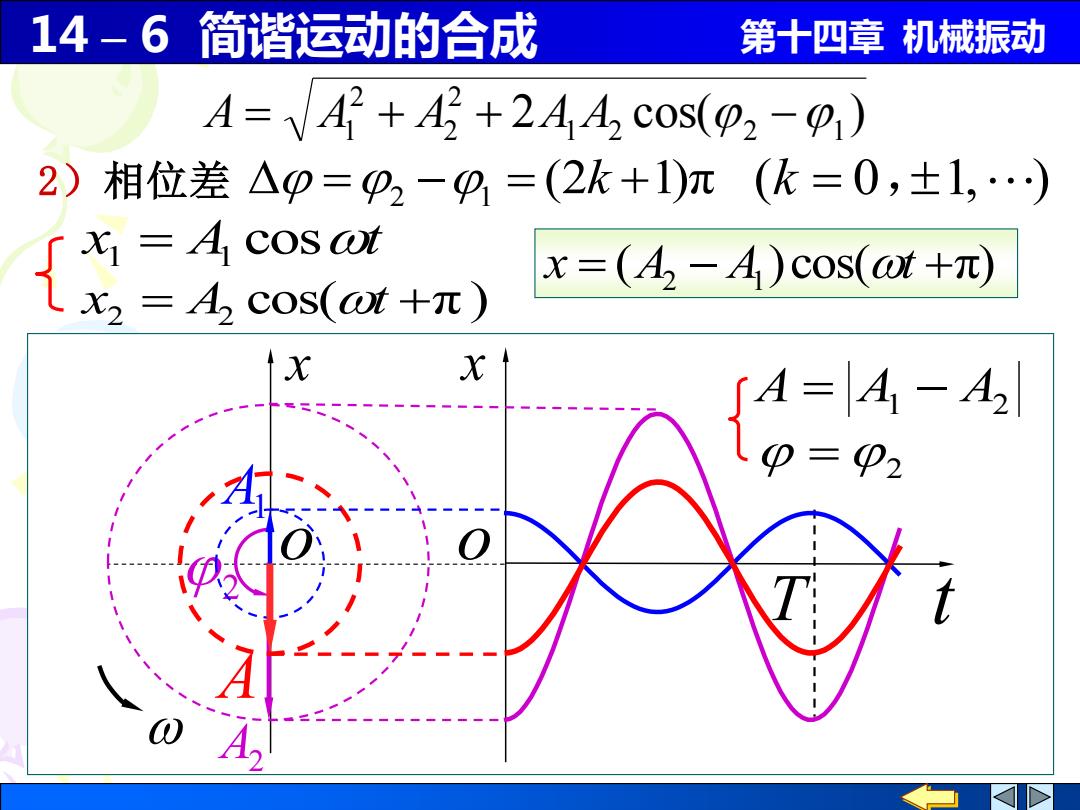
14 – 6 简谐运动的合成 第十四章 机械振动 x x t o o A = A1 − A2 = 2 ( )cos( π) x = A2 − A1 t + 2 cos( ) 1 2 2 1 2 2 2 A = A1 + A + A A − T A2 2 A1 A 2)相位差 =2 −1 = (2k +1)π (k = 0,1, ) x A cost 1 = 1 cos( π ) x2 = A2 t +
14-6简谐运动的合成 第十四章机械振动 1)相位差P2-9=2k (k=0,±1,…) A=4+A 相互加强 2)相位差p2-9=(2k+1)元(k=0,±1,…) A=4-4 相互削弱 3)一般情况 A+A>A>4-4
14 – 6 简谐运动的合成 第十四章 机械振动 3)一般情况 A1 + A2 A A1 − A2 A = A1 − A2 2)相位差 1)相位差 A = A1 + A2 2 −1 = 2kπ (k = 0,1,) 相互加强 相互削弱 2 −1 = (2k +1)π (k = 0,1,)
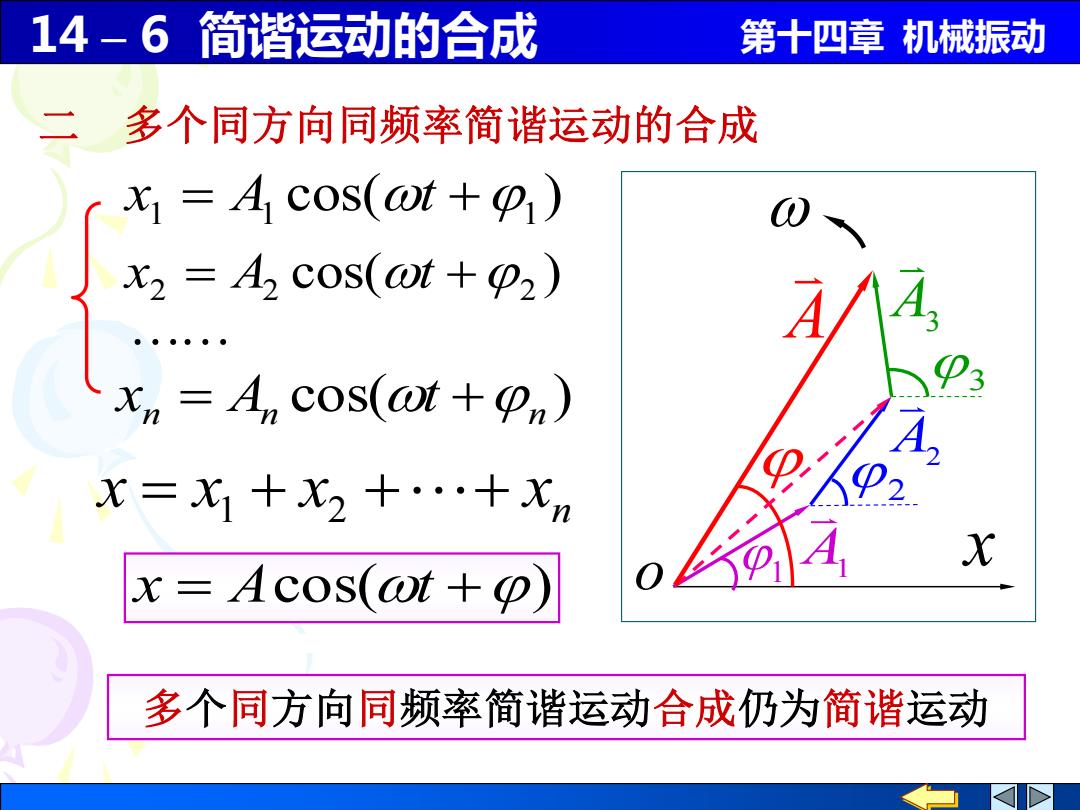
14-6简谐运动的合成 第十四章机械振动 二多个同方向同频率简谐运动的合成 x=A cos(at+) x2 =A2 cos(@t+p2) xn=Ar cos(aot+e) X=X1+X2+…+xm X x=Acos(at+o) 多个同方向同频率简谐运动合成仍为简谐运动
14 – 6 简谐运动的合成 第十四章 机械振动 1 A1 x o 二 多个同方向同频率简谐运动的合成 A2 2 A3 3 x = Acos(t +) n x = x + x ++ x 1 2 cos( ) 1 = 1 +1 x A t cos( ) 2 = 2 +2 x A t cos( ) n n n x = A t + A 多个同方向同频率简谐运动合成仍为简谐运动