
Recognition Objects to Recognition Computed Objects Features to Objects 计算机视觉 Images with Features Edges Regions Shapes Textures Digital Images Image Digitization 2D Imaging sensors Imaging math Phy) Objects Scenes
Objects & Scenes 2D Imaging sensors Computed Objects Images with Features Digital Images Recognition Edges Regions Shapes Textures Imaging (math & Phy) Image Digitization Features to Objects Objects to Recognition
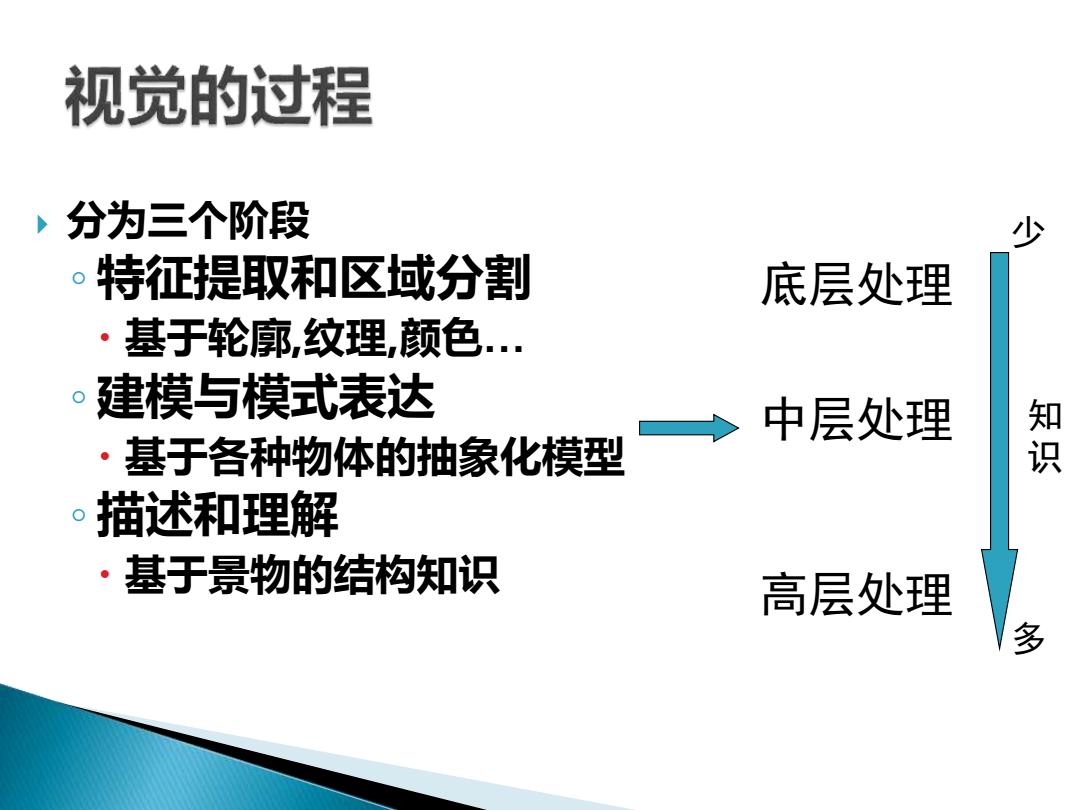
视觉的过程 ↓分为三个阶段 少 。特征提取和区域分割 底层处理 ·基于轮廓,纹理,颜色.… 。建模与模式表达 。中层处理 ·基于各种物体的抽象化模型 贺 。描述和理解 ·基于景物的结构知识 高层处理 多
分为三个阶段 ◦ 特征提取和区域分割 基于轮廓,纹理,颜色… ◦ 建模与模式表达 基于各种物体的抽象化模型 ◦ 描述和理解 基于景物的结构知识 底层处理 中层处理 高层处理 知识少多
计算机视觉的研究内容 输入设备(input device)的研制,包括成像设备和 数字化设备·成象设备是指通过光学摄像机或红 外、激光、超声、X射线对周围场景或物体进行 探测成象,得到关于场景或物体的二维或三维数 字化图像. 对输入的原始图像进行预处理.这一过程借用了 大量的图像处理技术和算法,如图像滤波、图像 增强、边缘检测等,以便从图像中抽取诸如角点 边缘、线条、边界以及色彩等关于场景的基本特 征;这一过程还包含了各种图像变换(如校正)、 图像纹理检测、图像运动检测等
◼ 输入设备(input device)的研制,包括成像设备和 数字化设备.成象设备是指通过光学摄像机或红 外、激光、超声、X射线对周围场景或物体进行 探测成象,得到关于场景或物体的二维或三维数 字化图像. ◼ 对输入的原始图像进行预处理.这一过程借用了 大量的图像处理技术和算法,如图像滤波、图像 增强、边缘检测等,以便从图像中抽取诸如角点、 边缘、线条、边界以及色彩等关于场景的基本特 征;这一过程还包含了各种图像变换(如校正)、 图像纹理检测、图像运动检测等.
计算机视觉的研究内容 恢复场景的深度、表面法线方向、轮廓等有关场 景的2.5维信意,并在此基础上恢复物体的完整三 维图,建立物体三维描述.。 根据机器预先存贮的模型知识以及形状,色彩等 特征,对学图像中吝种物体进行识别,确定它们用 于哪一类物体. 建立各个图像中物体的拓扑关系图,给出图像所反 映景物的结构描述. 体系结构(system,architecture),涉及,一系列 相关的课题,并行结构、,分层结构、信急流结构、 拓扑结构以及从设计到实现的途径
◼ 恢复场景的深度、表面法线方向、轮廓等有关场 景的2.5维信息,并在此基础上恢复物体的完整三 维图,建立物体三维描述. ◼ 根据机器预先存贮的模型知识以及形状、色彩等 特征,对于图像中各种物体进行识别,确定它们用 于哪一类物体. ◼ 建立各个图像中物体的拓扑关系图,给出图像所反 映景物的结构描述. ◼ 体系结构(system architecture),涉及一系列 相关的课题,并行结构、分层结构、信息流结构、 拓扑结构以及从设计到实现的途径.
视觉面临的困难 图像多义性:三维场景被投影为二维图像,深度和不可 见部分的信息被丢失,因而会出现不同形状的三维物体投 影在图像平面上产生相同图像的问题·另外,在不同角度 获取同一物体的图像会有很大的差异。 环境因素影响:场景中的诸多因素,包括照明、物体形状、 表面颜色、摄像机以及空间关系变化都会对成像有影响, 知识导引:同样的图像在不同的知识导引下,将会产生 不同的识别结果. 大量数据:灰度图像,彩色图像,深度图像的信息量十 分巨大,巨大的数据量需要很大的存贮空间,同时不易实 现快速处理
图像多义性: 三维场景被投影为二维图像,深度和不可 见部分的信息被丢失,因而会出现不同形状的三维物体投 影在图像平面上产生相同图像的问题.另外,在不同角度 获取同一物体的图像会有很大的差异. 环境因素影响:场景中的诸多因素,包括照明、物体形状、 表面颜色、摄像机以及空间关系变化都会对成像有影响. 知识导引: 同样的图像在不同的知识导引下,将会产生 不同的识别结果. 大量数据: 灰度图像,彩色图像,深度图像的信息量十 分巨大,巨大的数据量需要很大的存贮空间,同时不易实 现快速处理.