智能规划 ·规划领域主要两个工作:如 何方便的(紧凑并且方便求 解)表达和如何高效求解 Initial state (搜索) ·表示:状态、行动 ·状态:(动态)系统在 桌只 某时刻的情况,问题 Goal state 的状态描述 初始状态、目标状态 ·行动:状态空间上的 部分映射,对状态描 述进行变换的一组操 作 求解:计算(搜索)出从 初始状态变化到目标状 态的一个操作序列 onh道asau 日e绿里 状态空间搜索,偏序 规划,规划图 Planning as {SAT CSP,ILP,-},等 日+4+4二1在)QG
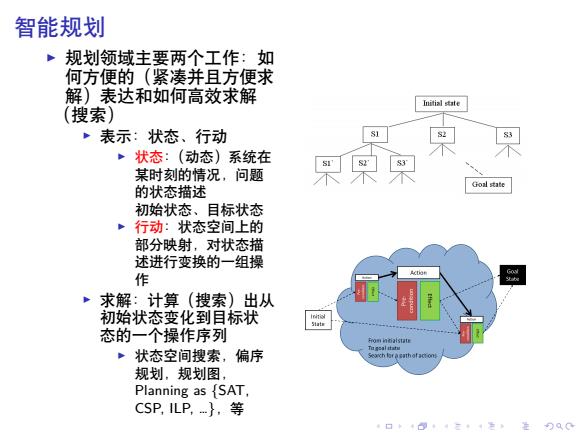
. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . 智能规划 ▶ 规划领域主要两个工作:如 何方便的(紧凑并且方便求 解)表达和如何高效求解 (搜索) ▶ 表示:状态、行动 ▶ 状态:(动态)系统在 某时刻的情况,问题 的状态描述 初始状态、目标状态 ▶ 行动:状态空间上的 部分映射,对状态描 述进行变换的一组操 作 ▶ 求解:计算(搜索)出从 初始状态变化到目标状 态的一个操作序列 ▶ 状态空间搜索,偏序 规划,规划图, Planning as {SAT, CSP, ILP, …},等
规划问题基本假设 规划问题非常复杂,为简化问题而提出一些简化的假设(经 典规划基本假设): ,(AO)有限系统(Finite system):问题只涉及有限的状态、行 动、事件等 ·(A1)完全可观察(Fully observable):永远知道系统当前所在 的状态 ·(A2)确定性(Deterministic):每个行动只会导致一种确定的 影响 ·(A3)静态性(Static):不存在外部行动,环境所有的改变都来 自控制者的行动 ·(A4)状态目标(Attainment goals):目标是一些需要达到的目 标状态 ,(A5)序列规划(Sequential plans):规划结果是一个线性行动 序列 ·(A6)隐含时间(Implicit time):不考虑时间持续性 ~(A7)离线规划(Off--line planning):规划器不考虑执行时状态 ,口,。三,4告进 )Q0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 规划问题基本假设 ▶ 规划问题非常复杂,为简化问题而提出一些简化的假设(经 典规划基本假设): ▶ (A0) 有限系统 (Finite system): 问题只涉及有限的状态、行 动、事件等 ▶ (A1) 完全可观察 (Fully observable): 永远知道系统当前所在 的状态 ▶ (A2) 确定性 (Deterministic): 每个行动只会导致一种确定的 影响 ▶ (A3) 静态性 (Static): 不存在外部行动,环境所有的改变都来 自控制者的行动 ▶ (A4) 状态目标 (Attainment goals): 目标是一些需要达到的目 标状态 ▶ (A5) 序列规划 (Sequential plans): 规划结果是一个线性行动 序列 ▶ (A6) 隐含时间 (Implicit time): 不考虑时间持续性 ▶ (A7) 离线规划 (Off-line planning): 规划器不考虑执行时状态
规划问题分类 利用上述假设我们可以区分所研究的规划问题,其中经典规划问 题就是满足从A0到A7所有假设的规划问题 Stochastic Parkally Obsorvabla Oees常e游脚一 "Classical Planning 4口◆4⊙t1三1=,¥9QC
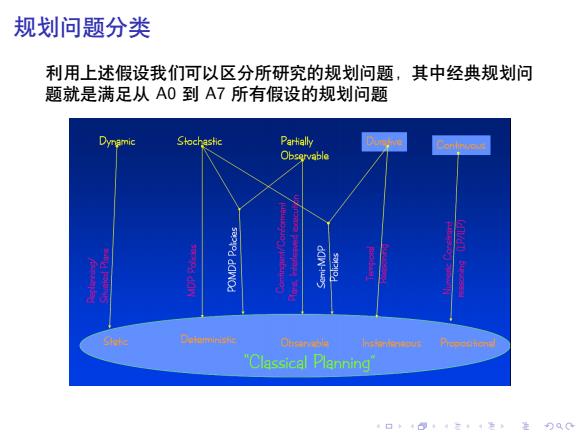
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 规划问题分类 利用上述假设我们可以区分所研究的规划问题,其中经典规划问 题就是满足从 A0 到 A7 所有假设的规划问题

经典规划扩展 经典规划虽然做了很多简化,但复杂性还是很高,在实际应 用中很难使用 新经典规划在这方面带来了可喜的进展,分别用图规划技 术、SAT技术、CSP技术等方法来解决经典规划问题 ~另一方面,现实不可避免的具有不确定性(uncertainty),因 为: ·信息不完全性:对世界的描述是不可能完全的 ·不可预测性:外部事件的发生是不可预测的 行动不确定性:有些行动效果本质上就是不确定,如投骰子 对不确定性的描述可以采用非确定性(Nondeterministic)方 法,也可以采用概率方法:对于环境观察可以是完全的,也 可以是部分的或者完全不可观察的 口卡回t·三4色,是分Q0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 经典规划扩展 ▶ 经典规划虽然做了很多简化,但复杂性还是很高,在实际应 用中很难使用 ▶ 新经典规划在这方面带来了可喜的进展,分别用图规划技 术、SAT 技术、CSP 技术等方法来解决经典规划问题 ▶ 另一方面,现实不可避免的具有不确定性 (uncertainty),因 为: ▶ 信息不完全性: 对世界的描述是不可能完全的 ▶ 不可预测性: 外部事件的发生是不可预测的 ▶ 行动不确定性: 有些行动效果本质上就是不确定,如投骰子 ▶ 对不确定性的描述可以采用非确定性 (Nondeterministic) 方 法,也可以采用概率方法; 对于环境观察可以是完全的,也 可以是部分的或者完全不可观察的
Table of Contents 自动规划概述 经典规划(Classical Planning) 规划问题 状态空间规划(State-Space Planning 规划空间规划(Plan-Space Planning 新经典规划(Neoclassical Planning 规划图技术(Planning-Graph Techniques) Planning as [SAT,CSP.ILP.. 经典规划的扩展 分层任务网规划 不确定规划 非确定规划 概率规划 4口◆4⊙t1三1=,¥9QC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Table of Contents 自动规划概述 经典规划 (Classical Planning) 规划问题 状态空间规划 (State-Space Planning) 规划空间规划 (Plan-Space Planning) 新经典规划 (Neoclassical Planning) 规划图技术 (Planning-Graph Techniques) Planning as {SAT, CSP, ILP, …} 经典规划的扩展 分层任务网规划 不确定规划 非确定规划 概率规划