圆上清支大学 e+口 LECTURE 2 ME371/ME337 DESIGN AND MANUFACTURING Kinematic Fundamentals Fun with MECHANISMS Covered:Ch2-in Design of Machinery 圆上泽夫道大学 OUTLINE Basic concepts and definitions How does a MECHANISM work? The kinematic diagram A simple equation-Gruebler Criterion Exceptions to Gruebler's Equation 1
1 Kinematic Fundamentals ——Fun with MECHANISMS LECTURE 2 Covered:Ch2- in Design of Machinery ME371/ME337 DESIGN AND MANUFACTURING OUTLINE Basic concepts and definitions How does a MECHANISM work? The kinematic diagram A simple equation-Gruebler Criterion Exceptions to Gruebler’s Equation
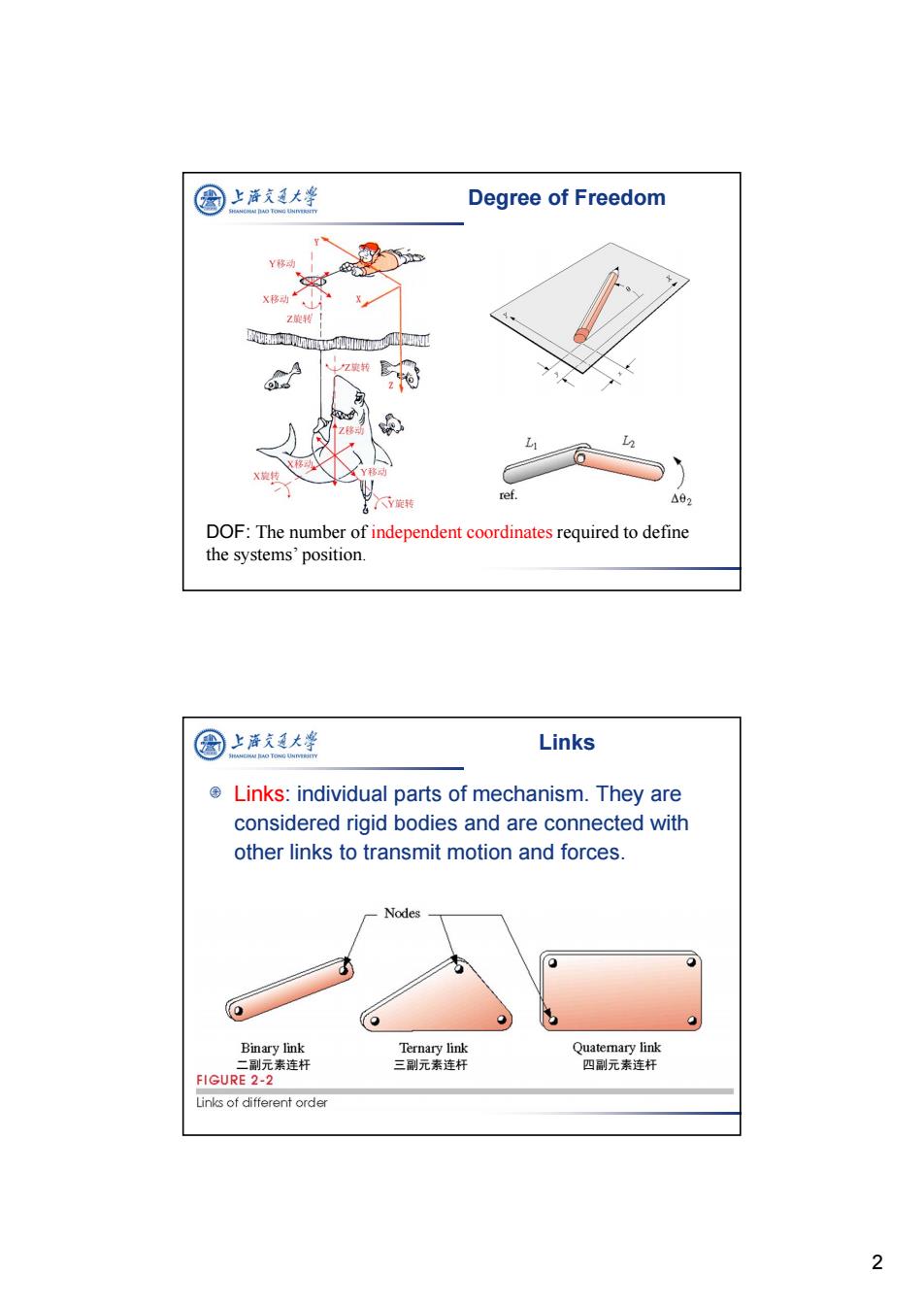
圈上海文通大华 Degree of Freedom Y移动 X移动 Z转 地中中 z转 ref. Y旋转 △02 DOF:The number of independent coordinates required to define the systems'position. 圆上泽夫道大学 Links Links:individual parts of mechanism.They are considered rigid bodies and are connected with other links to transmit motion and forces. Nodes Binary link Ternary link Quatemary link 二副元素连杆 三副元素连杆 四副元素连杆 FIGURE 2-2 Links of different order 2
2 Degree of Freedom DOF: The number of independent coordinates required to define the systems’ position. Links: individual parts of mechanism. They are considered rigid bodies and are connected with other links to transmit motion and forces. Links 二副元素连杆 三副元素连杆 四副元素连杆
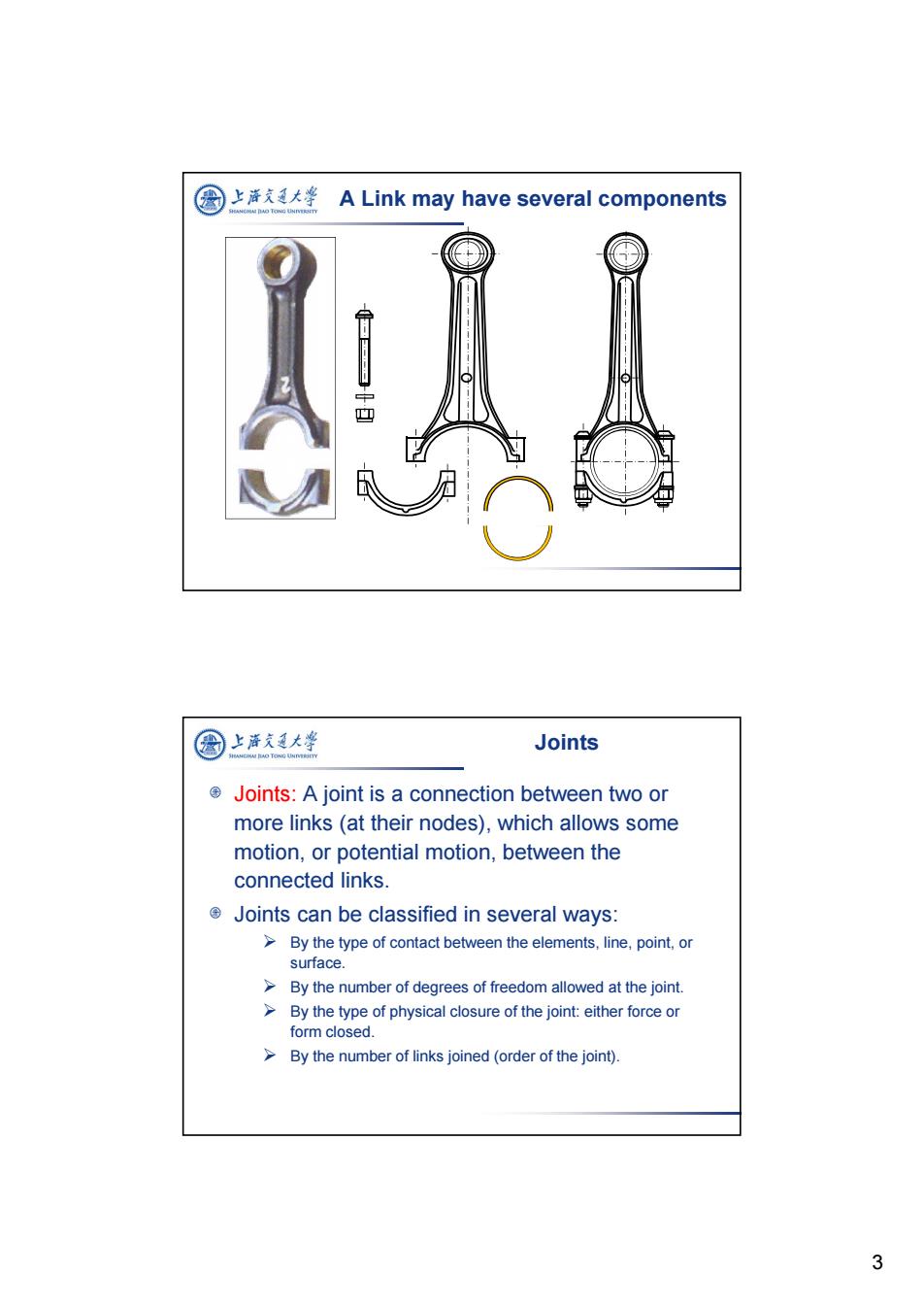
圈上大¥A Link may have several components 圆上清支大华 Joints Joints:A joint is a connection between two or more links(at their nodes),which allows some motion,or potential motion,between the connected links Joints can be classified in several ways: >By the type of contact between the elements,line,point,or surface. >By the number of degrees of freedom allowed at the joint. >By the type of physical closure of the joint:either force or form closed. >By the number of links joined(order of the joint). 3
3 A Link may have several components Joints: A joint is a connection between two or more links (at their nodes), which allows some motion, or potential motion, between the connected links. Joints can be classified in several ways: By the type of contact between the elements, line, point, or surface. By the number of degrees of freedom allowed at the joint. By the type of physical closure of the joint: either force or form closed. By the number of links joined (order of the joint). Joints
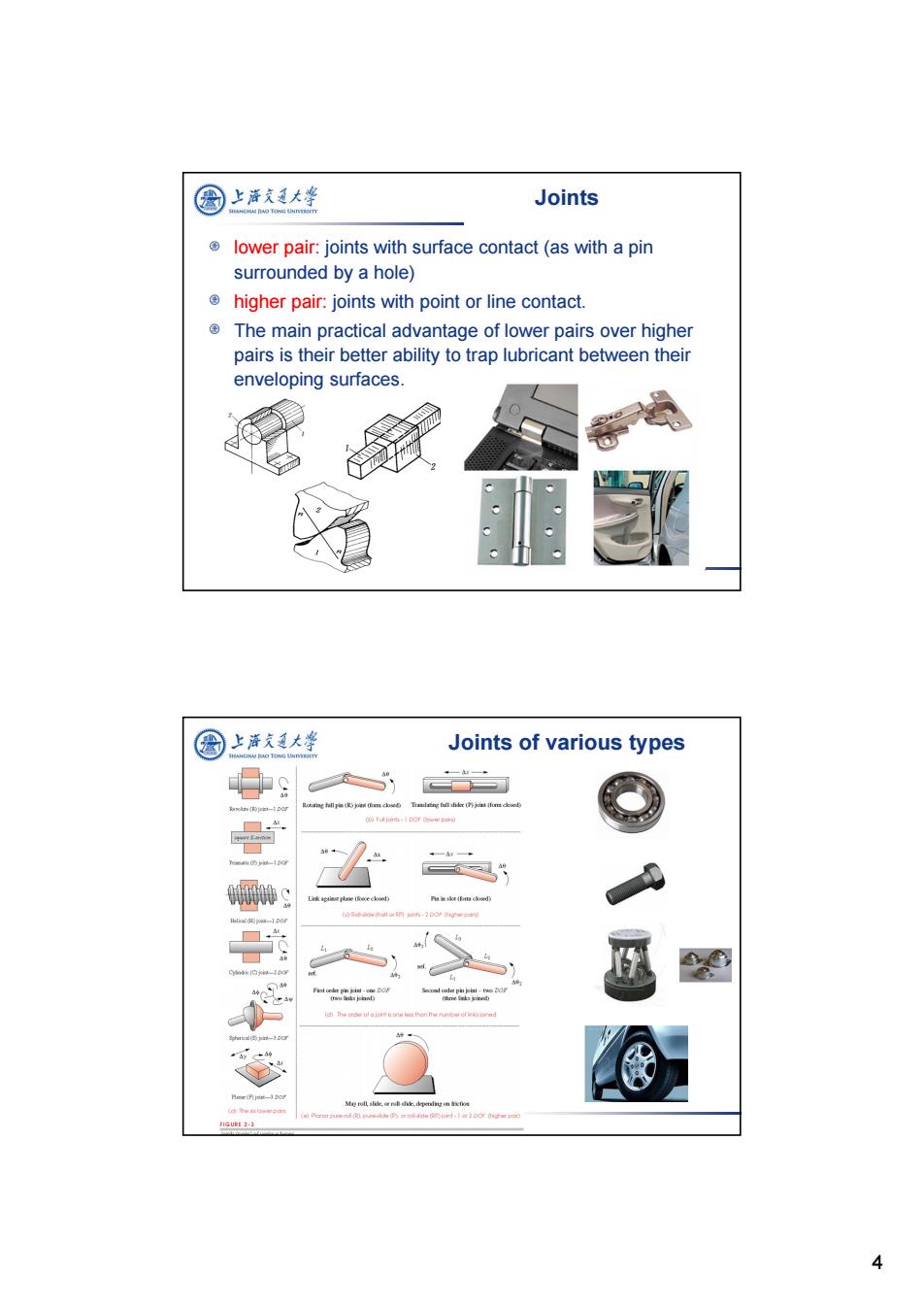
国 上海文通大学 Joints lower pair:joints with surface contact(as with a pin surrounded by a hole) 国 higher pair:joints with point or line contact. 国 The main practical advantage of lower pairs over higher pairs is their better ability to trap lubricant between their enveloping surfaces 周 上游充豆大¥ Joints of various types 三州 IGURI 2-3 4
4 lower pair: joints with surface contact (as with a pin surrounded by a hole) higher pair: joints with point or line contact. The main practical advantage of lower pairs over higher pairs is their better ability to trap lubricant between their enveloping surfaces. Joints Joints of various types
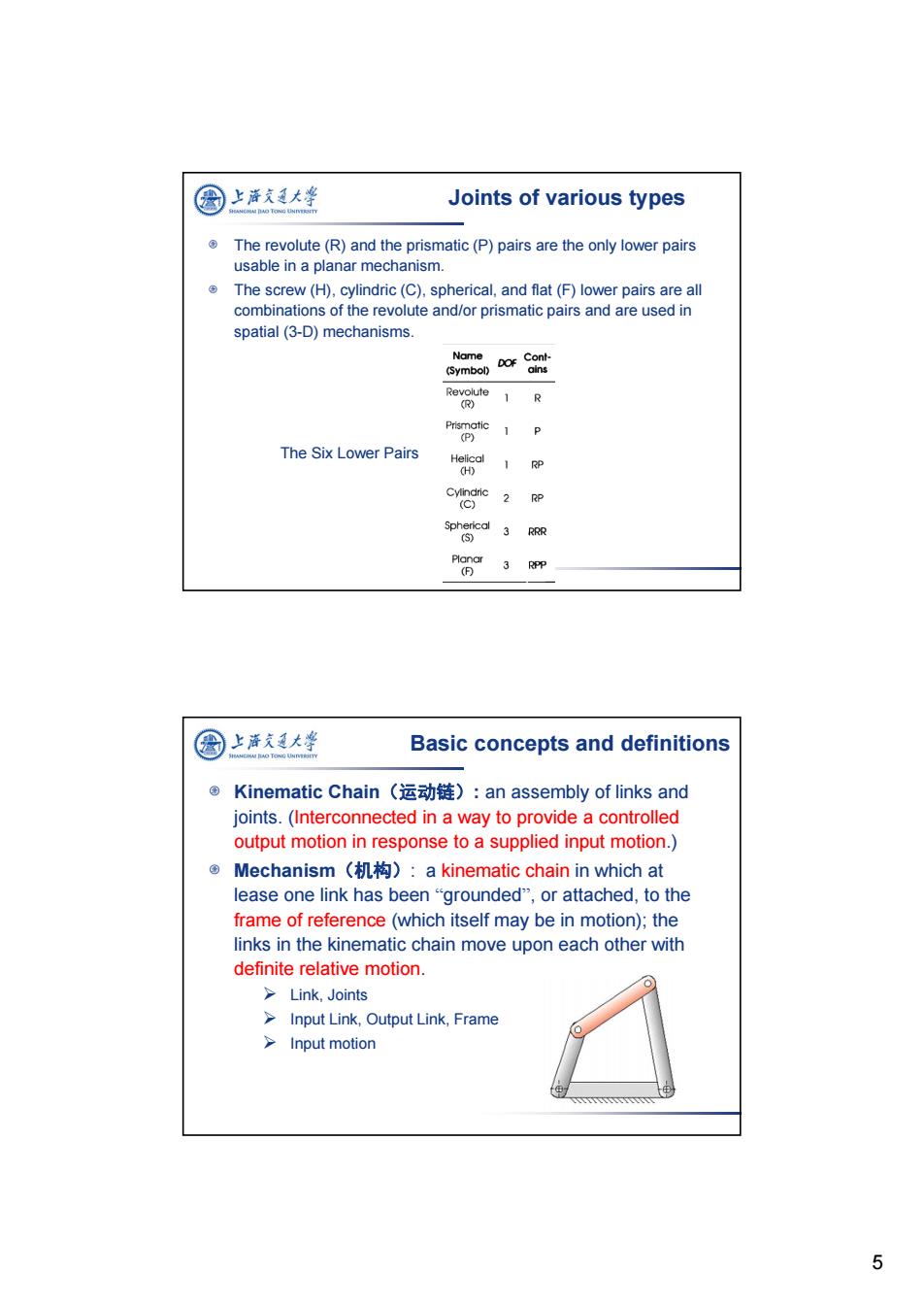
圆上泽文大学 Joints of various types The revolute(R)and the prismatic(P)pairs are the only lower pairs usable in a planar mechanism. The screw(H),cylindric(C),spherical,and flat(F)lower pairs are all combinations of the revolute and/or prismatic pairs and are used in spatial(3-D)mechanisms. Name (Symbol)DoF Cont- ains Revolute 1 (R) R Prismatic 1 (P) 0 The Six Lower Pairs Helical (H) 1 RP Cylindric (C) 2 RP Spherical 3 RRR P 3 RPP 圈上泽夫道大学 Basic concepts and definitions Kinematic Chain(运动链):an assembly of links and joints.(Interconnected in a way to provide a controlled output motion in response to a supplied input motion.) Mechanism(机构):a kinematic chain in which at lease one link has been "grounded",or attached,to the frame of reference (which itself may be in motion);the links in the kinematic chain move upon each other with definite relative motion. >Link,Joints >Input Link,Output Link,Frame >Input motion 5
5 The revolute (R) and the prismatic (P) pairs are the only lower pairs usable in a planar mechanism. The screw (H), cylindric (C), spherical, and flat (F) lower pairs are all combinations of the revolute and/or prismatic pairs and are used in spatial (3-D) mechanisms. The Six Lower Pairs Joints of various types Kinematic Chain(运动链): an assembly of links and joints. (Interconnected in a way to provide a controlled output motion in response to a supplied input motion.) Mechanism(机构): a kinematic chain in which at lease one link has been “grounded”, or attached, to the frame of reference (which itself may be in motion); the links in the kinematic chain move upon each other with definite relative motion. Link, Joints Input Link, Output Link, Frame Input motion Basic concepts and definitions