第12卷第4期 智能系统学报 Vol.12 No.4 2017年8月 CAAI Transactions on Intelligent Systems Aug.2017 D0I:10.11992/is.201605001 改进D-S证据理论在 电动汽车锂电池故障诊断中的应用 夏飞23,马茜2,张浩23,彭道刚2,孙朋2,罗志疆2 (1.上海电力学院自动化工程学院,上海200090:2.上海发电过程智能管控工程技术研究中心,上海200090:3.同 济大学电子与信息工程学院,上海201804) 摘要:针对电动汽车电池系统的故障采用基于神经网络的改进DS证据理论组合规则完成诊断过程。为了避免 单一途径的诊断可能造成故障漏检误检的状况,决策层采用D-S证据理论组合规则来确定基于BP网络和RBF网络 两种故障诊断算法结果。然而为了克服D$证据理论处理高度冲突证据的缺陷,本文提出了一种基于神经网络改 进的D-$证据理论组合规则。首先,采用神经网络对电池故障进行初步诊断,结合网络诊断准确率来分配不确定信 息并构造证据体,又引入了证据间的支持矩阵来确定新的加权证据体。然后,把各个焦元的信任度融入D-S证据理 论组合规则,从而融合神经网络证据体及新加权证据体。最后,依据决策准则确定锂电池系统的故障状态。通过仿 真实验验证了本文提出的改进DS证据理论融合诊断方法在电动汽车锂电池故障诊断中的有效性。 关键词:故障诊断:电动汽车:锂电池:改进证据理论:信息融合 中图分类号:TP301文献标志码:A文章编号:1673-4785(2017)04-0526-12 中文引用格式:马茜,夏飞,张浩,等.改进D-S证据理论在电动汽车锂电池故障诊断中的应用[J].智能系统学报,2017,12(4): 526-537. 英文引用格式:MAXi,XIA Fei,.ZHANG Hao,etal.Application of improved D-S evidence theory in fault diagnosis of lithium batteries in electric vehicles[J].CAAI transactions on intelligent systems,2017,12(4):526-537. Application of improved D-S evidence theory in fault diagnosis of lithium batteries in electric vehicles XIA Fei3,MA Xi2,ZHANG Hao23,PENG Daogang'2,SUN Peng'2,LUO Zhijiang'2 (1.College of Automation Engineering,Shanghai University of Electric Power,Shanghai 200090,China;2.Shanghai Engineering Research Center of Intelligent Management and Control for Power Process,Shanghai 200090,China;3.College of Electronics and Information Engineering,Tongji University,Shanghai 201804,China) Abstract:In this study,we used the improved Dempster-Shafer (D-S)evidence theory combination rules based on the neural network to construct a fault diagnosis process for an electric vehicle battery system.To avoid misdiagnoses and missed diagnoses caused by a single fault diagnosis method,we applied the D-S evidence theory combination principle to determine the result based on the back-propagation (BP)network and radial basis function (RBF) network fault diagnosis algorithm.However,to overcome the defects in the D-S evidence theory in dealing with highly conflicting evidence,we propose a D-S evidence theory combination principle based on an improved neural network.First,we apply a neural network to perform a preliminary diagnosis regarding battery failure and the accuracy of the network diagnosis.Then,we distribute indefinite information and construct a body of evidence.We also introduce a support matrix of this evidence to determine a new weighted body of evidence.We then integrate the credibility of every focal element into the D-S evidence theory combination rules to fuse the neural network body of evidence with the new weighted body of evidence.Lastly,based on the decision criterion,we determine the failure state of the lithium battery system.Our simulation results show that our proposed improved D-S evidence theory fusion diagnosis method is effective in the fault diagnosis of electric vehicles with lithium batteries. Keywords:fault diagnosis;electric vehicle;lithium battery;improved evidence theory;information fusion 电动汽车的动力锂电池系统对于整个电动汽 车而言,是保证汽车正常行驶和准确预估续驶里程 的基础。当前制约电动汽车发展的核心技术就是 收稿日期:2016-05-03 在行车过程中电池系统能否准确切实提供动力,确 基金项目:上海市“科技创新行动计划”高新技术领域科研项目 (15111106800):上海市发电过程智能管控工程技术研究中 保安全出行。由于目前国内动力电池技术并非完 心项目(14DZ2251100):上海市电站自动化技术重点实验室 全成熟,电池故障在初期征兆不易察觉,因此对电 开放课题(13D72273800). 通信作者:张浩.E-mail:hzhangk@163.com
第 12 卷第 4 期 智 能 系 统 学 报 Vol.12 №.4 2017 年 8 月 CAAI Transactions on Intelligent Systems Aug. 2017 DOI:10.11992 / tis.201605001 改进 D⁃S 证据理论在 电动汽车锂电池故障诊断中的应用 夏飞1,2,3 ,马茜1,2 ,张浩1,2,3 ,彭道刚1,2 ,孙朋1,2 ,罗志疆1,2 (1.上海电力学院 自动化工程学院 , 上海 200090; 2.上海发电过程智能管控工程技术研究中心, 上海 200090; 3.同 济大学 电子与信息工程学院,上海 201804) 摘 要:针对电动汽车电池系统的故障采用基于神经网络的改进 D⁃S 证据理论组合规则完成诊断过程。 为了避免 单一途径的诊断可能造成故障漏检误检的状况,决策层采用 D⁃S 证据理论组合规则来确定基于 BP 网络和 RBF 网络 两种故障诊断算法结果。 然而为了克服 D⁃S 证据理论处理高度冲突证据的缺陷,本文提出了一种基于神经网络改 进的 D⁃S 证据理论组合规则。 首先,采用神经网络对电池故障进行初步诊断,结合网络诊断准确率来分配不确定信 息并构造证据体,又引入了证据间的支持矩阵来确定新的加权证据体。 然后,把各个焦元的信任度融入 D⁃S 证据理 论组合规则,从而融合神经网络证据体及新加权证据体。 最后,依据决策准则确定锂电池系统的故障状态。 通过仿 真实验验证了本文提出的改进 D⁃S 证据理论融合诊断方法在电动汽车锂电池故障诊断中的有效性。 关键词:故障诊断;电动汽车;锂电池;改进证据理论;信息融合 中图分类号:TP301 文献标志码:A 文章编号:1673-4785(2017)04-0526-12 中文引用格式:马茜,夏飞,张浩,等.改进 D⁃S 证据理论在电动汽车锂电池故障诊断中的应用[ J]. 智能系统学报, 2017, 12( 4): 526-537. 英文引用格式:MA Xi, XIA Fei, ZHANG Hao,et al. Application of improved D⁃S evidence theory in fault diagnosis of lithium batteries in electric vehicles[J]. CAAI transactions on intelligent systems, 2017, 12(4): 526-537. Application of improved D⁃S evidence theory in fault diagnosis of lithium batteries in electric vehicles XIA Fei 1,2,3 , MA Xi 1,2 ,ZHANG Hao 1,2,3 , PENG Daogang 1,2 , SUN Peng 1,2 , LUO Zhijiang 1,2 (1. College of Automation Engineering, Shanghai University of Electric Power, Shanghai 200090, China; 2. Shanghai Engineering Research Center of Intelligent Management and Control for Power Process, Shanghai 200090, China; 3. College of Electronics and Information Engineering, Tongji University, Shanghai 201804, China) Abstract:In this study, we used the improved Dempster⁃Shafer (D⁃S) evidence theory combination rules based on the neural network to construct a fault diagnosis process for an electric vehicle battery system. To avoid misdiagnoses and missed diagnoses caused by a single fault diagnosis method, we applied the D⁃S evidence theory combination principle to determine the result based on the back⁃propagation (BP) network and radial basis function (RBF) network fault diagnosis algorithm. However, to overcome the defects in the D⁃S evidence theory in dealing with highly conflicting evidence, we propose a D⁃S evidence theory combination principle based on an improved neural network. First, we apply a neural network to perform a preliminary diagnosis regarding battery failure and the accuracy of the network diagnosis. Then, we distribute indefinite information and construct a body of evidence. We also introduce a support matrix of this evidence to determine a new weighted body of evidence. We then integrate the credibility of every focal element into the D⁃S evidence theory combination rules to fuse the neural network body of evidence with the new weighted body of evidence. Lastly, based on the decision criterion, we determine the failure state of the lithium battery system. Our simulation results show that our proposed improved D⁃S evidence theory fusion diagnosis method is effective in the fault diagnosis of electric vehicles with lithium batteries. Keywords: fault diagnosis; electric vehicle; lithium battery; improved evidence theory; information fusion 收稿日期:2016-05-03. 基金项目: 上 海 市 “ 科 技 创 新 行 动 计 划” 高 新 技 术 领 域 科 研 项 目 (15111106800);上海市发电过程智能管控工程技术研究中 心项目(14DZ2251100);上海市电站自动化技术重点实验室 开放课题(13DZ2273800). 通信作者:张浩.E⁃mail: hzhangk@ 163.com. 电动汽车的动力锂电池系统对于整个电动汽 车而言,是保证汽车正常行驶和准确预估续驶里程 的基础。 当前制约电动汽车发展的核心技术就是 在行车过程中电池系统能否准确切实提供动力,确 保安全出行。 由于目前国内动力电池技术并非完 全成熟,电池故障在初期征兆不易察觉,因此对电
第4期 夏飞,等:改进DS证据理论在电动汽车锂电池故障诊断中的应用 ·527· 池系统进行故障诊断研究,从而确保电池处于正常 的权重因子来修正证据源山。文献[12]提出了矛 运作状态,具有非常重要的现实意义。 盾系数来确定证据的权重。文献[13]综合了证据 电池在工作中不能避免颠簸碰撞等状况发生, 体可信度和证据源可靠度给出了证据可信度的计 导致电池电压过高或过低,电流过大或过小等。目 算公式,但是对于两个支持度的权重大小如何选择 前电动汽车电池系统故障诊断主要的研究方向集 仍然没有客观的计算方法。这些改进方法仅仅采 中在专家诊断和神经网络两个方面。文献[1]中结 用证据间每个焦元被赋予的基本概率分配函数值 合了模糊数学、神经网络和专家系统,通过专家系 的差值来衡量证据间的距离,但是没有考虑在某一 统搭建整体框架,采用模糊数学和神经网络的方法 个证据体中相应焦元之间的关联性,在证据源不确 实现电池故障诊断:文献[2]通过电池系统的仿真 定的情况下,证据之间的距离描述得不够准确。 模型,提取传感器的信号特征建立BP神经网络完 2)对组合规则的改进。Yagert首先提出了冲 成故障模式识别;文献[3]采用小波包对电池特征 突信息的分配,将不能起到正面效果的冲突信息赋 提取,设计B神经网络对电池故障进行诊断,同时 值给辨识框架,处理方法保守。文献[15]认为冲突 设计上位机,提供直接显示和数据分析支持。由于 信息也具有有用信息,对其进行了利用和分配。这 动力锂电池系统自身的复杂性和容易受到周围环 两种方法在处理多个证据与一个证据高度冲突时, 境影响等不确定性因素,将导致故障诊断的准确性 使未知项获得较大的支持度,无法做出正确决策。 下降。为了提高电动汽车锂电池故障诊断的准确 文献[16]依据命题的平均支持度进行加权分配冲 性,避免单一诊断方法可能造成漏检误检的情况发 突信息,但是该方法只是简单的平均加权整合,降 生,需要对同一故障对应的不同故障征兆进行融合 低了有用证据的可信度;文献[17]中对辨识框架下 处理得到合理判定结果。D-S证据理论作为一种处 不同目标进行了单独考虑,按照证据关于不同目标 理不确定性的推理方法,可以将其应用于锂电池的 的冲突程度进行分配:文献[18]根据部分与整体之 故障诊断技术中。同时D-S证据理论在信息融合方 间的相似性,将每一个命题的BPA的总和看作系统 面得到了广泛应用。基于D-S证据理论和BP神经 的确定性程度,作为信任度转换的权重。当目标的 网络的信息融合改进了多传感器信息融合[):基于 确定度较大时变换结果应该相对乐观,相反,它还 改进D-S证据理论融合量子粒子群优化BP神经网 是很保守的。 络的诊断方法提高了水电机组振动故障诊断效 针对以上改进算法的问题,本文提出了一种新 果[):基于小波神经网络和概率神经网络结合D-S 的改进算法应用于电动汽车的故障诊断中。应用 证据理论完成了对汽轮机组故障诊断分析。 神经网络对电池进行初步诊断,根据诊断的准确率 然而经典D-S证据理论在处理冲突证据时往往 将不确定性信息进行重新分配,保证了证据信息的 得到悖于常理的结论。经典的Zadeh悖论中指出, 完整性。引入证据之间的支持矩阵确定证据体的 两位目击者都认为C是嫌疑犯的可能性极低,应该 加权系数,构造新的加权证据体,赋予可靠性低证 支持率最低。而经过数据融合后得到结果为目标 据较小的权重以降低对结果的不良影响。为了改 C,得到与实际相悖的结果。由此发现D-S证据理 进D-$证据理论对于冲突证据处理的不足,不仅考 论对于高度冲突的证据信息无法得到正确的融合 虑到证据关于不同焦元的冲突程度,而且进一步地 结果,因此需要对D-S证据理论在处理冲突信息方 将证据焦元目标的信任度融入组合规则中,不仅保 面作出改进。针对冲突证据的情况,国内外学者做 证了辨识框架的完整性,也对冲突信息进行了合理 了大量研究探索,可分为以下两种方法: 有效地分配。根据改进的D-S证据理论融合方法, 1)对数据模型的修改。由于传感器处于外界 将由神经网络诊断得到的两条证据及其加权证据 环境,经常受到周围自然环境、人为因素的干扰以 进行融合。最后,依据决策准则得符合常理的电池 及传感器自身性能的影响,常常需要对传感器得到 故障类型。 的证据数据修改其权重信息。目前对证据修正其 1 权重可以快速有效地识别出系统存在的冲突证据。 证据理论的改进 通常是利用证据距离函数表达证据体之间的距离 1.1加权证据体生成 及相似性程度],同时还有证据距离函数和其他函 对电池组和单体电池的电压、电流和温度等状 数联合共同修正证据源,包括了证据体的可靠 态参数的在线监测、估计和预测借助于传感器完 度[8】、方向相似度函数[)等。利用证据体间贴近 成,但是电动汽车在锂电池方面,由于电池系统功 度[]及贴近度概率转换规则的相关系数确定不同 率高、结构复杂,运行环境受到温度和颠簸等不确
池系统进行故障诊断研究,从而确保电池处于正常 运作状态,具有非常重要的现实意义。 电池在工作中不能避免颠簸碰撞等状况发生, 导致电池电压过高或过低,电流过大或过小等。 目 前电动汽车电池系统故障诊断主要的研究方向集 中在专家诊断和神经网络两个方面。 文献[1]中结 合了模糊数学、神经网络和专家系统,通过专家系 统搭建整体框架,采用模糊数学和神经网络的方法 实现电池故障诊断;文献[2]通过电池系统的仿真 模型,提取传感器的信号特征建立 BP 神经网络完 成故障模式识别;文献[3]采用小波包对电池特征 提取,设计 BP 神经网络对电池故障进行诊断,同时 设计上位机,提供直接显示和数据分析支持。 由于 动力锂电池系统自身的复杂性和容易受到周围环 境影响等不确定性因素,将导致故障诊断的准确性 下降。 为了提高电动汽车锂电池故障诊断的准确 性,避免单一诊断方法可能造成漏检误检的情况发 生,需要对同一故障对应的不同故障征兆进行融合 处理得到合理判定结果。 D⁃S 证据理论作为一种处 理不确定性的推理方法,可以将其应用于锂电池的 故障诊断技术中。 同时 D⁃S 证据理论在信息融合方 面得到了广泛应用。 基于 D⁃S 证据理论和 BP 神经 网络的信息融合改进了多传感器信息融合[4] ;基于 改进 D⁃S 证据理论融合量子粒子群优化 BP 神经网 络的诊断方法提高了水电机组振动故障诊断效 果[5] ;基于小波神经网络和概率神经网络结合 D⁃S 证据理论完成了对汽轮机组故障诊断分析[6] 。 然而经典 D⁃S 证据理论在处理冲突证据时往往 得到悖于常理的结论。 经典的 Zadeh 悖论中指出, 两位目击者都认为 C 是嫌疑犯的可能性极低,应该 支持率最低。 而经过数据融合后得到结果为目标 C,得到与实际相悖的结果。 由此发现 D⁃S 证据理 论对于高度冲突的证据信息无法得到正确的融合 结果,因此需要对 D⁃S 证据理论在处理冲突信息方 面作出改进。 针对冲突证据的情况,国内外学者做 了大量研究探索,可分为以下两种方法: 1)对数据模型的修改。 由于传感器处于外界 环境,经常受到周围自然环境、人为因素的干扰以 及传感器自身性能的影响,常常需要对传感器得到 的证据数据修改其权重信息。 目前对证据修正其 权重可以快速有效地识别出系统存在的冲突证据。 通常是利用证据距离函数表达证据体之间的距离 及相似性程度[7] ,同时还有证据距离函数和其他函 数联合 共 同 修 正 证 据 源, 包 括 了 证 据 体 的 可 靠 度[8] 、方向相似度函数[9] 等。 利用证据体间贴近 度[10]及贴近度概率转换规则的相关系数确定不同 的权重因子来修正证据源[11] 。 文献[12]提出了矛 盾系数来确定证据的权重。 文献[13] 综合了证据 体可信度和证据源可靠度给出了证据可信度的计 算公式,但是对于两个支持度的权重大小如何选择 仍然没有客观的计算方法。 这些改进方法仅仅采 用证据间每个焦元被赋予的基本概率分配函数值 的差值来衡量证据间的距离,但是没有考虑在某一 个证据体中相应焦元之间的关联性,在证据源不确 定的情况下,证据之间的距离描述得不够准确。 2)对组合规则的改进。 Yager [14] 首先提出了冲 突信息的分配,将不能起到正面效果的冲突信息赋 值给辨识框架,处理方法保守。 文献[15]认为冲突 信息也具有有用信息,对其进行了利用和分配。 这 两种方法在处理多个证据与一个证据高度冲突时, 使未知项获得较大的支持度,无法做出正确决策。 文献[16]依据命题的平均支持度进行加权分配冲 突信息,但是该方法只是简单的平均加权整合,降 低了有用证据的可信度;文献[17]中对辨识框架下 不同目标进行了单独考虑,按照证据关于不同目标 的冲突程度进行分配;文献[18]根据部分与整体之 间的相似性,将每一个命题的 BPA 的总和看作系统 的确定性程度,作为信任度转换的权重。 当目标的 确定度较大时变换结果应该相对乐观,相反,它还 是很保守的。 针对以上改进算法的问题,本文提出了一种新 的改进算法应用于电动汽车的故障诊断中。 应用 神经网络对电池进行初步诊断,根据诊断的准确率 将不确定性信息进行重新分配,保证了证据信息的 完整性。 引入证据之间的支持矩阵确定证据体的 加权系数,构造新的加权证据体,赋予可靠性低证 据较小的权重以降低对结果的不良影响。 为了改 进 D⁃S 证据理论对于冲突证据处理的不足,不仅考 虑到证据关于不同焦元的冲突程度,而且进一步地 将证据焦元目标的信任度融入组合规则中,不仅保 证了辨识框架的完整性,也对冲突信息进行了合理 有效地分配。 根据改进的 D⁃S 证据理论融合方法, 将由神经网络诊断得到的两条证据及其加权证据 进行融合。 最后,依据决策准则得符合常理的电池 故障类型。 1 证据理论的改进 1.1 加权证据体生成 对电池组和单体电池的电压、电流和温度等状 态参数的在线监测、估计和预测借助于传感器完 成,但是电动汽车在锂电池方面,由于电池系统功 率高、结构复杂,运行环境受到温度和颠簸等不确 第 4 期 夏飞,等:改进 D⁃S 证据理论在电动汽车锂电池故障诊断中的应用 ·527·
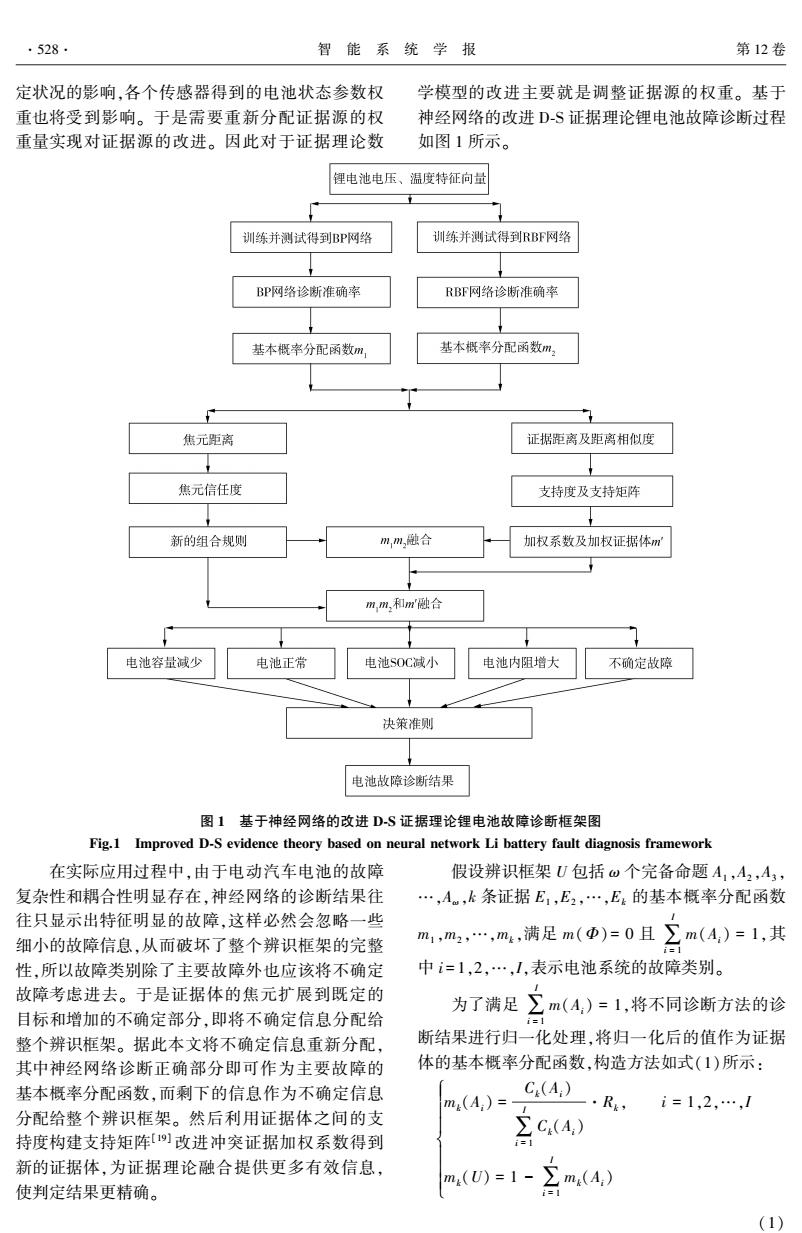
.528. 智能系统学报 第12卷 定状况的影响,各个传感器得到的电池状态参数权 学模型的改进主要就是调整证据源的权重。基于 重也将受到影响。于是需要重新分配证据源的权 神经网络的改进D-S证据理论锂电池故障诊断过程 重量实现对证据源的改进。因此对于证据理论数 如图1所示。 锂电池电压、温度特征向量 训练并测试得到BP网络 训练并测试得到RBF网络 BP网络诊断准确率 RBF网络诊断谁确率 基本概率分配函数m, 基本概率分配函数m? 焦元距离 证据距离及距离相似度 焦元信任度 支持度及支持矩阵 新的组合规则 m,m,融合 加权系数及加权证据体m m,m,和m'融合 电池容量减少 电池正常 电池S0C减小 电池内阻增大 不确定故障 决策准则 电池故障诊断结果 图1基于神经网络的改进DS证据理论锂电池故障诊断框架图 Fig.1 Improved D-S evidence theory based on neural network Li battery fault diagnosis framework 在实际应用过程中,由于电动汽车电池的故障 假设辨识框架U包括w个完备命题A1,A2,A3, 复杂性和耦合性明显存在,神经网络的诊断结果往 …,A,k条证据E1,E2,…,E:的基本概率分配函数 往只显示出特征明显的故障,这样必然会忽略一些 细小的故障信息,从而破坏了整个辨识框架的完整 m,m…,m,满足m()=0且三m(4)=1,其 性,所以故障类别除了主要故障外也应该将不确定 中i=1,2,…,1,表示电池系统的故障类别。 故障考虑进去。于是证据体的焦元扩展到既定的 为了满足∑m(4,)=1,将不同诊断方法的诊 目标和增加的不确定部分,即将不确定信息分配给 整个辨识框架。据此本文将不确定信息重新分配, 断结果进行归一化处理,将归一化后的值作为证据 其中神经网络诊断正确部分即可作为主要故障的 体的基本概率分配函数,构造方法如式(1)所示: 基本概率分配函数,而剩下的信息作为不确定信息 C(A) m(A:)= -·R4,i=1,2,…,1 分配给整个辨识框架。然后利用证据体之间的支 持度构建支持矩阵[]改进冲突证据加权系数得到 三c 新的证据体,为证据理论融合提供更多有效信息, 使判定结果更精确。 (0=1-三m4) (1)
定状况的影响,各个传感器得到的电池状态参数权 重也将受到影响。 于是需要重新分配证据源的权 重量实现对证据源的改进。 因此对于证据理论数 学模型的改进主要就是调整证据源的权重。 基于 神经网络的改进 D⁃S 证据理论锂电池故障诊断过程 如图 1 所示。 图 1 基于神经网络的改进 D⁃S 证据理论锂电池故障诊断框架图 Fig.1 Improved D⁃S evidence theory based on neural network Li battery fault diagnosis framework 在实际应用过程中,由于电动汽车电池的故障 复杂性和耦合性明显存在,神经网络的诊断结果往 往只显示出特征明显的故障,这样必然会忽略一些 细小的故障信息,从而破坏了整个辨识框架的完整 性,所以故障类别除了主要故障外也应该将不确定 故障考虑进去。 于是证据体的焦元扩展到既定的 目标和增加的不确定部分,即将不确定信息分配给 整个辨识框架。 据此本文将不确定信息重新分配, 其中神经网络诊断正确部分即可作为主要故障的 基本概率分配函数,而剩下的信息作为不确定信息 分配给整个辨识框架。 然后利用证据体之间的支 持度构建支持矩阵[19] 改进冲突证据加权系数得到 新的证据体,为证据理论融合提供更多有效信息, 使判定结果更精确。 假设辨识框架 U 包括 ω 个完备命题 A1 ,A2 ,A3 , …,Aω,k 条证据 E1 ,E2 ,…,Ek 的基本概率分配函数 m1 ,m2 ,…,mk,满足 m(Φ) = 0 且 ∑ I i = 1 m(Ai) = 1,其 中 i = 1,2,…,I,表示电池系统的故障类别。 为了满足 ∑ I i = 1 m(Ai) = 1,将不同诊断方法的诊 断结果进行归一化处理,将归一化后的值作为证据 体的基本概率分配函数,构造方法如式(1)所示: mk(Ai) = Ck(Ai) ∑ I i = 1 Ck(Ai) ·Rk, i = 1,2,…,I mk(U) = 1 - ∑ I i = 1 mk(Ai) ì î í ï ï ï ï ï ï (1) ·528· 智 能 系 统 学 报 第 12 卷

第4期 夏飞,等:改进DS证据理论在电动汽车锂电池故障诊断中的应用 ·529 式中:C,(A:)表示应用第k种诊断方法检测锂电池 数如式(6)所示: 故障状态时,诊断出电池处于A故障类型,此时的 B= k -,k=1,2,…,n (6 诊断结果输出。其中R表示第k种锂电池故障诊 断方法的诊断正确率,如式(2)所示: k=1 4)利用权重系数对证据进行修正,得到新的证 名 (x:-y:)2 据体: R=1- (2) (x:-x)2 m'= B()Xm (7) i=1 k=1 式中:x:表示第i组测试数据应用该诊断方法得到 综上,对于证据源的修正主要是利用不同诊断 的诊断结果值,一共有n组测试数据;y:表示第i组 方法的诊断正确率将不确定信息重新分配,在得到 测试数据的期望输出值:x.表示n组测试数据得到 辨识框架下各目标的基本概率分配函数后,计算两 的实验结果均值。 条证据的支持度,借助支持矩阵的特征向量得到加 在得到不同故障诊断方法对于锂电池故障的 权系数,生成新的证据体。 基本概率分配函数之后,按照以下步骤借助证据体 1.2证据理论组合规则的改进 之间支持矩阵生成加权证据体。 1.2.1经典D-S证据理论及改进 1)计算证据体间距离以及距离相似度。辨识 辨识框架U={A1,A2,A3…},n条证据对辨 框架上相互独立的两个证据体距离和距离相似度 识目标的支持率可以用基本概率分配函数来表 可以表示为 示,函数值越大表示对该目标的支持率越大,反 之越小。 doa(m:m)=(m -m)D(m -m)(3) 经典D-S证据理论的组合规则表示为 DS(m:,m;)=1-drA(m:,m;),i,j=1,2,,n ∑m,(4,)m,(4)m,(4)… (4) m(A)= 4n4nr…=A A≠Φ,U 1-k 式中:D表示2×2矩阵;N表示辨识框架的元素 个数。 (8) 2)计算证据m:的支持度。证据体m:的支持度 式中:k=∑m,(A)m2(4)m,(A)…,称k为 A,nA,nAr·=w 表示为 1 sup(m:)=∑DS(m,m,) (5) 证据冲突系数,1一为归一化因子。 经典的证据理论在处理高度冲突证据时会得 3)计算权重系数。构建证据E1,E2,…,En的支 到悖于常理的结论,因此需要进行冲突分析,将冲 持矩阵R=(sup(m:,m;))nxm 突系数重新分配。在此基础上,Yager首先提出分 式中:特征向量V=[u2,]T满足R=Aw,即 析,既然冲突系数对最终结果判定的影响最大,那 入:=T1·+r2·t…+打a·a。将A:作为证据 可以将其分配给整个辨识框架。文献[14]的组合 E,E2,…,En对证据E的支持度归一化,其权重系 规则表示为 (m(A)=m (A)m2(A )m3(A)... ADADAr…=A (9) m(U)= ∑m,(A)m2(4)m(A)…=k AiOAOAr…= 融合结果显示,绝大部分的支持率都赋给了辨 判定结果没有很好帮助。 识框架,对于冲突证据没有起到有效作用,仍然对 文献[15]中将冲突系数重新分配,组合规则为 m(A)= ∑m,(4)m,(4)m,(A,)…+k··q(A)A≠重,U A,n8ncr…=A (10) m(U)=】 ,m1(A:)m2(A)m3(A)…+k·e·q(U)+k(1-e) AinBinC..=U 式中:8=e是可信度,=,1 ∑k,是冲 n(n-1)1 突程度,q(A)=二∑m,(A)是目标A的支持度。 n1i运m 2 文献[16]同样对冲突系数修正,组合规则为
式中:Ck(Ai)表示应用第 k 种诊断方法检测锂电池 故障状态时,诊断出电池处于 Ai 故障类型,此时的 诊断结果输出。 其中 Rk 表示第 k 种锂电池故障诊 断方法的诊断正确率,如式(2)所示: Rk = 1 - ∑ n i = 1 (xi - yi) 2 ∑ n i = 1 (xi - xv) 2 (2) 式中:xi 表示第 i 组测试数据应用该诊断方法得到 的诊断结果值,一共有 n 组测试数据;yi 表示第 i 组 测试数据的期望输出值;xv 表示 n 组测试数据得到 的实验结果均值。 在得到不同故障诊断方法对于锂电池故障的 基本概率分配函数之后,按照以下步骤借助证据体 之间支持矩阵生成加权证据体。 1)计算证据体间距离以及距离相似度。 辨识 框架上相互独立的两个证据体距离和距离相似度 可以表示为 dBPA(mi,mj) = 1 2 (mi - mj)D(mi - mj) (3) DS(mi,mj) = 1 - dBPA(mi,mj), i,j = 1,2,…,n (4) 式中:D 表示 2 N ×2 N 矩阵;N 表示辨识框架的元素 个数。 2)计算证据 mi 的支持度。 证据体 mi 的支持度 表示为 sup(mi) = ∑i = 1 j≠i DS(mi,mj) (5) 3)计算权重系数。 构建证据 E1 ,E2 ,…,En 的支 持矩阵 R = (sup(mi,mj))n×n 式中:特征向量 V = v1 v2…vn [ ] T 满足 Rv = λv, 即 λvk = rk1·v1 +rk2·v2 +…+rkn·vn 。 将 λvk 作为证据 E1 ,E2 ,…,En 对证据 Ek 的支持度归一化,其权重系 数如式(6)所示: βk = vk ∑ n k = 1 vk , k = 1,2,…,n (6) 4)利用权重系数对证据进行修正,得到新的证 据体: m′ = ∑ n k = 1 β(k) × mk (7) 综上,对于证据源的修正主要是利用不同诊断 方法的诊断正确率将不确定信息重新分配,在得到 辨识框架下各目标的基本概率分配函数后,计算两 条证据的支持度,借助支持矩阵的特征向量得到加 权系数,生成新的证据体。 1.2 证据理论组合规则的改进 1.2.1 经典 D⁃S 证据理论及改进 辨识框架 U = { A1 ,A2 ,A3 …} , n 条证据对辨 识目标的支持率可以用基本概率分配函数来表 示,函数值越大表示对该目标的支持率越大,反 之越小。 经典 D⁃S 证据理论的组合规则表示为 m(A) = A ∑i∩Aj∩Al… = A m1(Ai)m2(Aj)m3(Al)… 1 - k A ≠ Φ,U (8) 式中: k = A ∑i∩Aj∩Al… = Φ m1(Ai)m2(Aj)m3(Al)…,称 k 为 证据冲突系数, 1 1 - k 为归一化因子。 经典的证据理论在处理高度冲突证据时会得 到悖于常理的结论,因此需要进行冲突分析,将冲 突系数重新分配。 在此基础上,Yager 首先提出分 析,既然冲突系数对最终结果判定的影响最大,那 可以将其分配给整个辨识框架。 文献[14] 的组合 规则表示为 m(A) = A ∑i∩Aj∩Al… = A m1(Ai)m2(Aj)m3(Al)… m(U) = A ∑i∩Aj∩Al… = Φ m1(Ai)m2(Aj)m3(Al)… = k ì î í ï ï ï ï (9) 融合结果显示,绝大部分的支持率都赋给了辨 识框架,对于冲突证据没有起到有效作用,仍然对 判定结果没有很好帮助。 文献[15]中将冲突系数重新分配,组合规则为 m(A) = A ∑i∩Bj∩Cl… = A m1(Ai)m2(Aj)m3(Al)… + k·ε·q(A) A ≠ Φ,U m(U) = A ∑i∩Bj∩Cl ... = U m1(Ai)m2(Aj)m3(Al)… + k·ε·q(U) + k(1 - ε) ì î í ï ï ï ï (10) 式中: ε = e - k ~ 是可信度,k ~ = 1 n(n - 1) 2 1≤∑i≤j≤n kij 是冲 突程度, q(A) = 1 n 1∑≤i≤n mi(A) 是目标 A 的支持度。 文献[16]同样对冲突系数修正,组合规则为 第 4 期 夏飞,等:改进 D⁃S 证据理论在电动汽车锂电池故障诊断中的应用 ·529·
·530· 智能系统学报 第12卷 m(A)=∑m,(A:)m2(4)m3(A)…+k·q(A),A≠重,U (11) An4nAr…=A 式中:g(4)=∑m(A)是目标A的支持度。 有效信息,很难达到预期良好效果。 n1运m 文献[17]认为传感器得到的冲突数据并不 文献[15]和文献[16]认为冲突系数并非完全 是针对所有的目标,而是对于某一个目标存在冲 没用,同样携带有用信息,将冲突系数重新分配,如 突。在得到目标的基本概率分配函数时,不仅考 式(10)~(11)表示。当证据存在高度冲突时,冲突 虑证据间关于这一目标的冲突情况,目标之间的 系数k较大,利用这样的改进方法进行组合,融合结 冲突信息也要考虑,提出一种新的合成法则,表 果会偏重于不确定信息部分,不能为正确结论提供 示为 m(Φ)=0 m(A)=∑m,(A,)m2(4)m(A)…+fA),A≠Φ, (12) n4nAr…=A 1 取f4)=(∑m,(4,)m,(4,)m,(4)…+ 可靠度也不是完全相同的。对组合规则的改进不 n4n4,nun=Φ 能只考虑全局层面上,而把目标本身的可靠度忽 m2(A)m1(A)m3(A)…+…),式中:n 略。证据的信任度和焦元的信任度是不同的,为了 AnA,nAkn…= 为证据数,i,j,k,l,s…=1,2,3,…,n。 降低信任度低的焦元对结果的影响,在文献[22]的 1.2.2改进的D-S证据理论组合规则 基础上,将焦元信任度加入到组合规则的改进中, 在经典证据理论的优势下关于证据理论组合 这样参与融合的每一个焦元都有一个分配系数。新 规则的改进就是按照一定的规则将证据冲突系数 的合成法则处理了证据对目标存在的一致性信息及冲 合理有效分配,体现冲突证据的有效融合[202]。从 突信息。依旧遵循D-S证据理论处理目标一致性理 全局角度分析,一些人为原因或者自然原因造成某 论,而对于冲突信息借鉴一致性信息的融合,将焦元的 些证据体与其他证据体冲突。从局部角度分析,引 信任度考虑进去,得到了合理充分的利用。 起冲突的可能是某一目标,不同证据体的同一目标 本文提出的新组合规则表示为 m(A)=m,(A.)mz (A )m3(A,)+f(A) A040An.=4 (13) m(U)=∑m,(4)m,(A,)m,(A) An4ynAn…=U 取 f4)=∑ D(A:)·m(A:) nnn=D(4)m(A)+D,(4)·m(A)+D,(A)·m,(A)+·mA)·m,A)·m(4,)+ D2(4)·m2(4) nunn=D.4)m4)+D,(4)·m(4,)+D,(4)·m(4)+·m,4)·m4,)·m(M,)+… 式中:f(A)表示冲突信息的分配,D,(A)表示第i条 焦元之间的距离,这里可以利用不同证据体与加权 证据中目标A:信任度。将证据中存在的冲突按照 证据体同一焦元的距离来表示,如式(14)所示。 焦元的冲突程度进行分配,归一化处理的分配因子 FD[m,(A)]=m.(A)-mAE(A)(14) 是焦元的可信度。 式中:mE(A:)是加权证据体。在得到焦元距的基 计算焦元的信任度可以效仿证据体的信任度。 础上获得每一个焦元的信任度2],并将其归一化。 利用不同证据体与加权证据体同一焦元的距离得 定义焦元的信任度,如式(15)所示,归一化的结果 到各条证据不同焦元的距离FD[m,(A)],再在焦 如式(16)所示。 元距的基础上得到各焦元的信任度。首先要得到 2m;(A:)mAVE(A:) Fcrd[m;(Ag)]=[1 -FD[m;(Ag)]] [m,(4)]2+[me(A)]2 i=1,2,…,n;k=1,2,…,K(15)
m(A) = A ∑i∩Aj∩Al… = A m1(Ai)m2(Aj)m3(Al)… + k·q(A),A ≠ Φ,U (11) 式中: q(A) = 1 n 1∑≤i≤n mi(A) 是目标 A 的支持度。 文献[15]和文献[16]认为冲突系数并非完全 没用,同样携带有用信息,将冲突系数重新分配,如 式(10) ~ (11)表示。 当证据存在高度冲突时,冲突 系数 k 较大,利用这样的改进方法进行组合,融合结 果会偏重于不确定信息部分,不能为正确结论提供 有效信息,很难达到预期良好效果。 文献[ 17] 认为传感器得到的冲突数据并不 是针对所有的目标,而是对于某一个目标存在冲 突。 在得到目标的基本概率分配函数时,不仅考 虑证据间关于这一目标的冲突情况,目标之间的 冲突信息也要考虑,提出一种新的合成法则,表 示为 m(Φ) = 0 m(A) = A ∑i∩Aj∩Al… = A { m1(Ai)m2(Aj)m3(Al)… + f(A),A ≠ Φ,U (12) 取f(A)= 1 n ( A ∑i∩As∩Ak∩… = Φ m1(Ai)m2(As)m3(Ak)… + A ∑ j∩As∩Ak∩… = Φ m2(Aj)m1(As)m3(Ak)… + …), 式中:n 为证据数,i,j,k,l,s… = 1,2,3,…,n 。 1.2.2 改进的 D⁃S 证据理论组合规则 在经典证据理论的优势下关于证据理论组合 规则的改进就是按照一定的规则将证据冲突系数 合理有效分配,体现冲突证据的有效融合[20-21] 。 从 全局角度分析,一些人为原因或者自然原因造成某 些证据体与其他证据体冲突。 从局部角度分析,引 起冲突的可能是某一目标,不同证据体的同一目标 可靠度也不是完全相同的。 对组合规则的改进不 能只考虑全局层面上,而把目标本身的可靠度忽 略。 证据的信任度和焦元的信任度是不同的,为了 降低信任度低的焦元对结果的影响,在文献[22]的 基础上,将焦元信任度加入到组合规则的改进中, 这样参与融合的每一个焦元都有一个分配系数。 新 的合成法则处理了证据对目标存在的一致性信息及冲 突信息。 依旧遵循 D⁃S 证据理论处理目标一致性理 论,而对于冲突信息借鉴一致性信息的融合,将焦元的 信任度考虑进去,得到了合理充分的利用。 本文提出的新组合规则表示为 m(A) = A ∑i∩Aj∩Al∩… = A m1(Ai)m2(Aj)m3(Al) + f(A) m(U) = A ∑i∩Aj∩Al∩… = U m1(Ai)m2(Aj)m3(Al) ì î í ï ï ï ï (13) 取 f(A) = A ∑i∩As∩Ak∩… = Φ D1(Ai)·m1(Ai) D1(Ai)·m1(Ai) + D2(As)·m2(As) + D3(Ak)·m3(Ak) + … ·m1(Ai)·m2(As)·m3(Ak)… + A ∑ j∩As∩Ak∩… = Φ D2(Aj)·m2(Aj) D2(Aj)·m2(Aj) + D1(As)·m1(As) + D3(Ak)·m3(Ak) + … ·m2(Aj)·m1(As)·m3(Ak)… + … 式中:f(A)表示冲突信息的分配,Di(Ak)表示第 i 条 证据中目标 Ak 信任度。 将证据中存在的冲突按照 焦元的冲突程度进行分配,归一化处理的分配因子 是焦元的可信度。 计算焦元的信任度可以效仿证据体的信任度。 利用不同证据体与加权证据体同一焦元的距离得 到各条证据不同焦元的距离 FD[mi(Ak)],再在焦 元距的基础上得到各焦元的信任度。 首先要得到 焦元之间的距离,这里可以利用不同证据体与加权 证据体同一焦元的距离来表示,如式(14)所示。 FD[mi(Ak)] = mi(Ak) - mAVE(Ak) (14) 式中:mAVE(Ak)是加权证据体。 在得到焦元距的基 础上获得每一个焦元的信任度[23] ,并将其归一化。 定义焦元的信任度,如式(15) 所示,归一化的结果 如式(16)所示。 Fcrd[mi(Ak)] = [1 - FD[mi(Ak)]]· 2mi(Ak)mAVE(Ak) [mi(Ak)] 2 + [mAVE(Ak)] 2 i = 1,2,…,n;k = 1,2,…,K (15) ·530· 智 能 系 统 学 报 第 12 卷