第7卷第1期 智能系统学报 Vol.7 No.1 2012年2月 CAAI Transactions on Intelligent Systems Feh.2012 D0I:10.3969/j.i8sn.1673-4785.201107006 动态成像条件下基于SURF和Mean shift的 运动目标高精度检测 胡光龙,秦世引 (北京航空航天大学自动化科学与电气工程学院,北京100191) 摘要:针对动态成像条件下运动目标检测的难点问题,提出了一种将SURF特征和M©an shift图像分割相结合的高 精度运动目标检测方法.首先利用SU℉特征进行图像配准,以补偿背景图像的运动漂移:然后利用差分求积二值化 和形态学滤波方法检测出运动目标区域:最后结合Mean shift图像分割方法实现运动目标的精确检测.通过一系列 实拍视频的运动目标检测实验验证了此算法的有效性和可行性.实验结果表明,此方法能精确检测出动态成像条件 下所形成的动态背景中的运动目标,而且具有良好的鲁棒性和抗噪能力,对于光照条件和亮度变化等不利因素也有 较强的适应能力。 关键词:SURF;图像配准;Mean shift;图像分割;动态背景;目标检测 中图分类号:TP391.41文献标志码:A文章编号:16734785(2012)01006108 High precision detection of a mobile object under dynamic imaging based on SURF and Mean shift HU Guanglong,QIN Shiyin (School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China) Abstract:Taking into account the difficulty of moving-object detection with a dynamic background caused by cam- era motion,a new method was proposed based on speeded-up robust features (SURF)and Mean shift.First,the image registration based on SURF was applied to compensate the background motion,and then binarization of quad- rature by difference method and morphological filters was carried out to detect the moving-object's area so that the accurate detection and segmentation of the moving object was accomplished with Mean shift.Finally,the effective- ness and satisfactory performance were validated through a series of experiments of dynamic videos.The results in- dicate that the proposed algorithm is characterized by high precision,low false detection,and strong robustness to noises,and thus can be extended to application in practical engineering. Keywords:speeded-up robust features(SURF);image registration;Mean shift;image segmentation;dynamic background;object detection 运动目标检测是计算机视觉领域的研究热点之 列,进行目标检测较为容易,且计算简单,常用的方 一,在目标跟踪、视频监控、生物医学、机器人技术等 法有:帧间差分法、背景差分法、光流法「6]等.在动 领域都有着广泛的应用14.根据摄像机是否运动, 态背景目标检测中,由于摄像机处于运动状态,导致 运动目标检测方法可分为2类:静态背景目标检测 图像中的背景和目标同时运动,使目标检测变得非 和动态背景目标检测5].在静态背景目标检测中, 常复杂,是运动目标检测中的难点问题. 摄像机处于静止状态,产生的是背景静止的图像序 动态背景下的运动目标检测方法主要有3类: 背景配准法、光流法和相机几何模型法].背景配 收稿日期:201107-13. 准法是在没有相机内外参数的情况下,利用图像配 基金项目:国家自然科学基金资助项目(60875072);北京市自然科学 准,结合背景差分法,检测出运动目标.光流法中,由 基金资助项目(4112035):中澳国际合作项目 (2007DFA11530). 于背景和目标运动速度不同,导致光流存在较大差 通信作者:胡光龙.E-mail:hglg007@163.com. 异,并据此检测出运动物体;但光流法计算量大,且
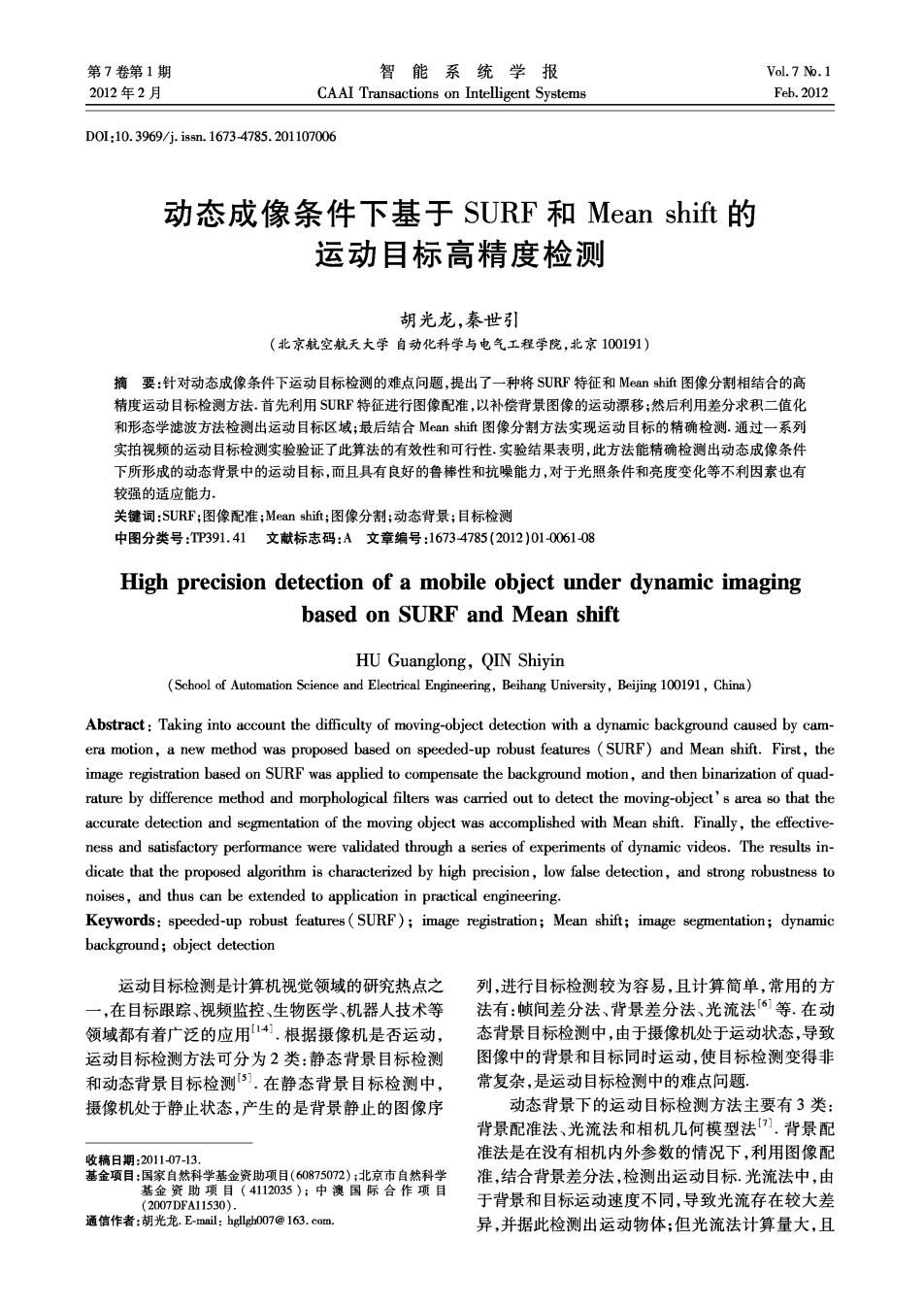
62+ 智能系统学报 第7卷 有孔径问题.相机几何模型法利用相机的内外参数 只存在平移和旋转变化时,能够取得较好的效果,但 计算出像素位置的变化,实现相机运动的补偿,但在 无法适应缩放变化.文献[15]中提出的基于SFT 实际应用中很难实时得到相机内外参数, 特征和差分求积二值化的运动目标检测方法,利用 图像配准方法有模板匹配、基于特征的方法和 SFT特征准确补偿背景运动;但形态学处理后容易 基于傅里叶变换的方法3类[8].特征匹配法具有计 导致目标被割裂,造成多检情况的发生, 算简单、精度高的特点,但现有的角点匹配方法受匹 文献[16]结合光流估计和背景配准方法来实 配误差和环境变化的影响较大.2006年,H.Bay在 现航拍图像下汽车和行人的检测和跟踪,取得了较 分析、总结多种特征检测方法的基础上,提出了 好的效果;但速度较慢,且对小目标的检测效果较 SURF(speeded-up robust features)描述算子[9],其对 差.文献[17]提出了结合光流场的模图像和Mean 图像平移、旋转、缩放等变化具有良好的不变 sh近图像分割的方法来精确检测运动目标,取得了 性o.文献[12]利用SURF特征进行了图像配准 较好的结果;然而光流场计算量大,且该方法无法检 和拼接方面的研究,取得了良好的效果。 测出大位移运动目标.但其提出的结合Mean shi进 针对动态视频中进行运动目标检测的难点问 图像分割来检测运动目标的方法,可有效减少误检、 题,鉴于Mean shift算法在图像分割中的优势Is],本 多检情况的发生。 文提出了一种基于SURF和Mean shift的运动目标 因此,结合图像分割和边缘检测等方法来实现 检测方法:首先利用SURF特征进行图像配准以补 运动目标的精确检测,是动态成像条件下运动目标 偿背景运动,然后利用差分求积二值化和形态学滤 检测的发展趋势 波检测出运动目标区域,最后结合Mean shift图像 分割的方法,精确检测出运动目标.实验结果表明, 2运动目标高精度检测策略与算法 该方法能精确检测出运动目标,有效减少误检、多检 2.1算法原理与实现策略 情况的发生,具有良好的鲁棒性和抗噪能力, 本文提出的算法原理如图1所示,其处理流程 为:对输入视频进行采集得到相邻4帧的彩色图像 相关研究工作与发展趋势 lc、lc2、lca、Ic4,对其进行灰度化处理得到相应的灰 目前,针对动态背景下的运动目标检测,大多数 度图像Ic1、Ic2、Ic3、I4;然后通过提取SURF特征进 研究者倾向于使用背景配准法和光流法,以获得高精 行视频帧配准,可以得到Is配准到Ic的图像Ic3!和 度的检测结果,并尽可能减少误检、多检情况的发生 Ic4配准到Ic2的图像Ic42;进而利用差分求积二值化 利用背景配准法来检测运动目标的重点在于准 和形态学滤波实现运动目标区域的有效检测;最后 确补偿背景运动.文献[14]中提出的基于相位相关 结合Mean shift图像分割和边缘提取以精确检测出 和差分求积二值化的运动目标检测方法,在摄像机 运动目标 基于 SURE 基于 图像 差分求积二 的 的 配准 值化 输入 运动 输出目标 视 视频采集 度化处理 运 域生 日标 检测 检测结果 基于 SURF 基 特征 配准 提取 图 的差 形态学滤波后处 频顿 配淮 Mean shift 边缘检演 图像分割 图1动态成像条件下基于SURF和Mean shift的运动目标检测原理 Fig.1 Principle of moving object detection under dynamic imaging conditions based on SURF and Mean shift
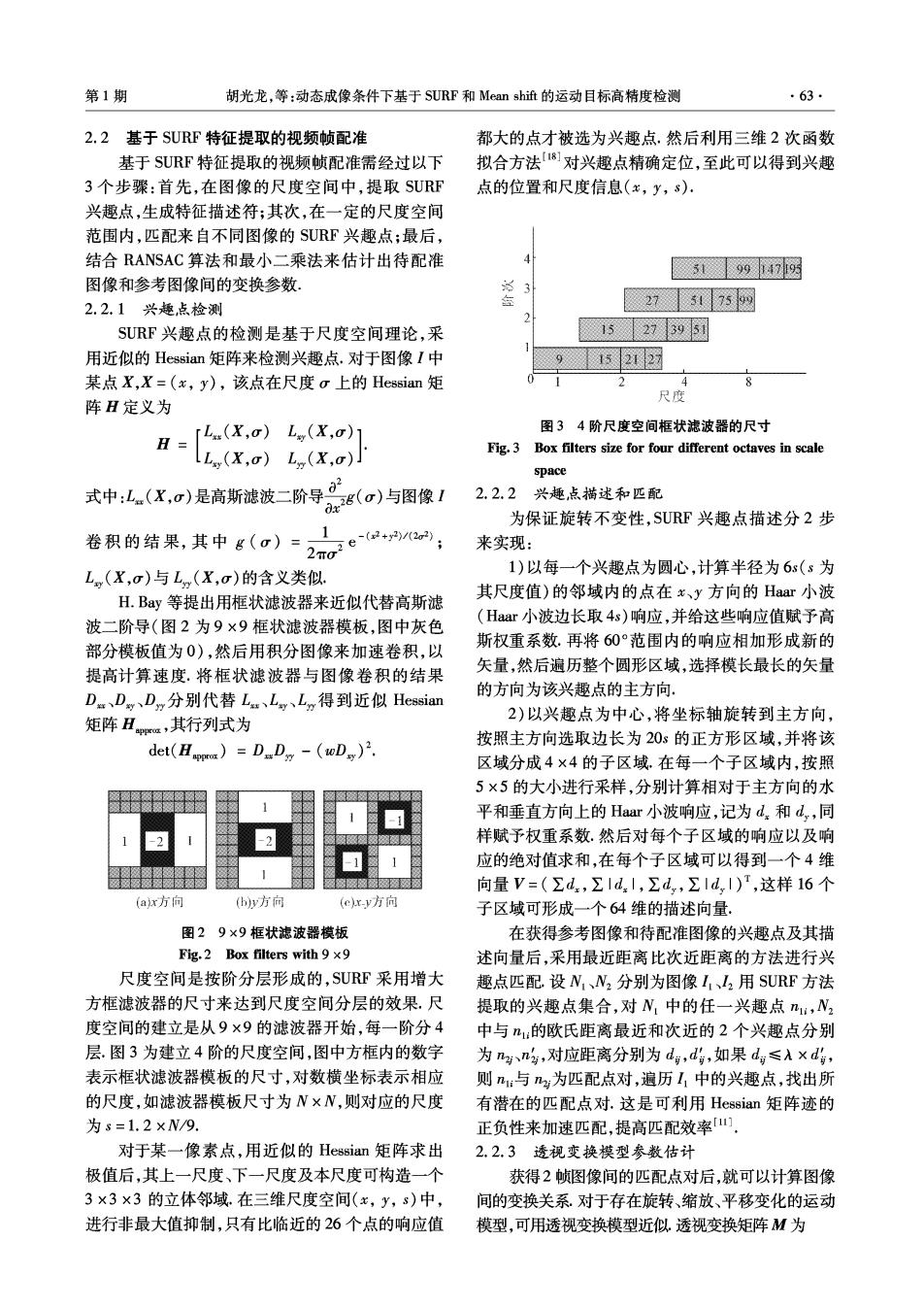
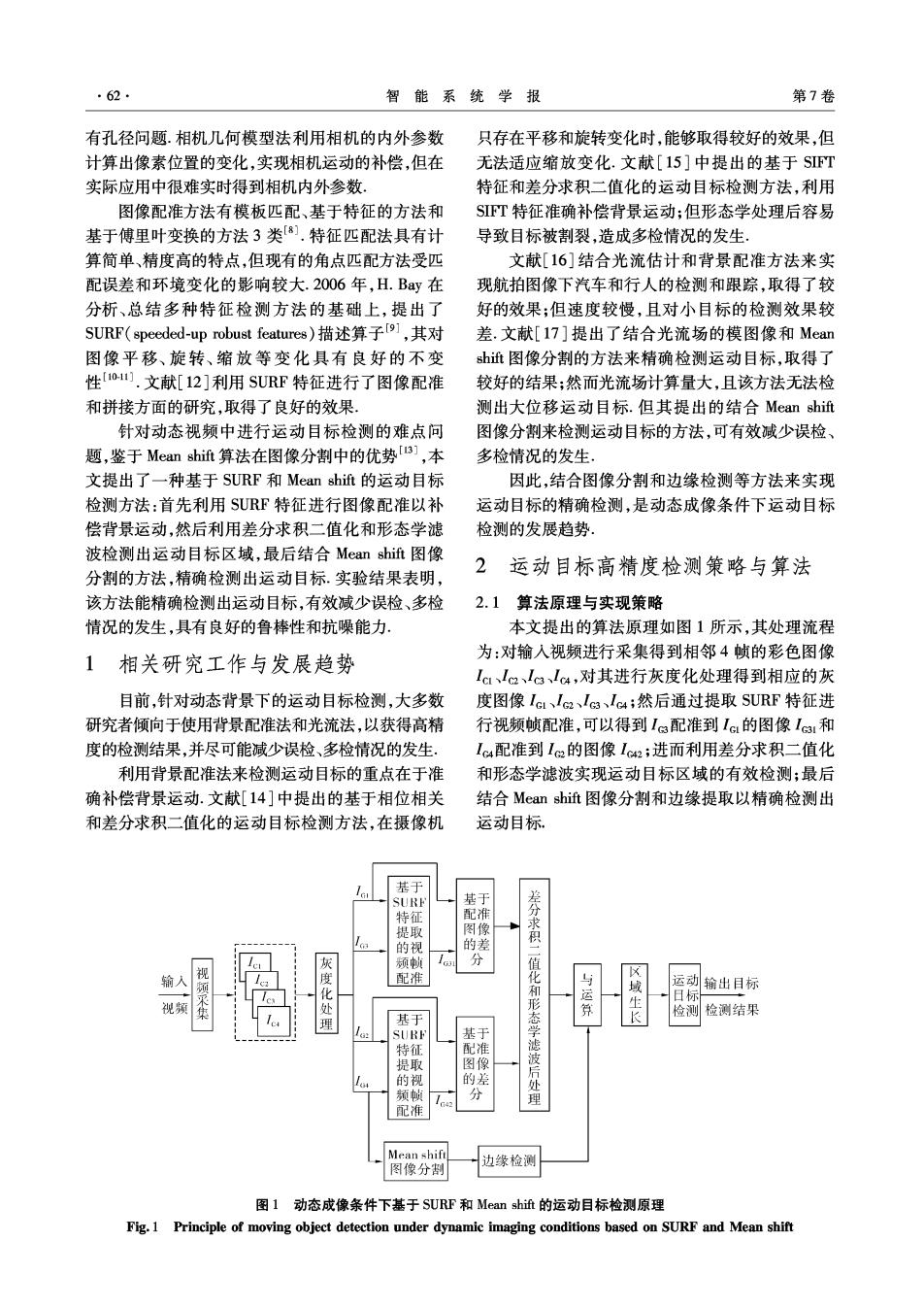
第1期 胡光龙,等:动态成像条件下基于SURF和Mean shift的运动目标高精度检测 63 2.2基于SURF特征提取的视频帧配准 都大的点才被选为兴趣点,然后利用三维2次函数 基于SURF特征提取的视频帧配准需经过以下 拟合方法1对兴趣点精确定位,至此可以得到兴趣 3个步骤:首先,在图像的尺度空间中,提取SURF 点的位置和尺度信息(x,y,s). 兴趣点,生成特征描述符;其次,在一定的尺度空间 范围内,匹配来自不同图像的SURF兴趣点;最后, 结合RANSAC算法和最小二乘法来估计出待配准 4 5994网 图像和参考图像间的变换参数。 3 2.2.1兴趣点检测 盗 2715网 2 SURF兴趣点的检测是基于尺度空间理论,采 152395 用近似的Hessian矩阵来检测兴趣点.对于图像I中 9152127 某点X,X=(x,y),该点在尺度o上的Hessian矩 2 4 阵H定义为 尺度 H- rL(X,o)Lw(X,o)1 图34阶尺度空间框状滤波器的尺寸 Fig.3 Box filters size for four different octaves in scale LL(X,o)Ln(X,o)J space 式中:L.(X,0)是高斯滤波二阶号(o)与图像1 2.2.2兴趣点描述和匹配 为保证旋转不变性,SURF兴趣点描述分2步 卷积的结果,其中g(o)=26r: 1 来实现: 1)以每一个兴趣点为圆心,计算半径为6s(s为 L(X,o)与Ln(X,o)的含义类似. H.Bay等提出用框状滤波器来近似代替高斯滤 其尺度值)的邻域内的点在x、y方向的Haa小波 波二阶导(图2为9×9框状滤波器模板,图中灰色 (Haar小波边长取4s)响应,并给这些响应值赋予高 部分模板值为0),然后用积分图像来加速卷积,以 斯权重系数.再将60°范围内的响应相加形成新的 提高计算速度.将框状滤波器与图像卷积的结果 矢量,然后遍历整个圆形区域,选择模长最长的矢量 的方向为该兴趣点的主方向. Da、Dy、Dy分别代替La、Ly、Ln得到近似Hessian 矩阵Hpm,其行列式为 2)以兴趣点为中心,将坐标轴旋转到主方向, 按照主方向选取边长为20s的正方形区域,并将该 det(Hpm)=DDn-(oD)2. 区域分成4×4的子区域.在每一个子区域内,按照 5×5的大小进行采样,分别计算相对于主方向的水 平和垂直方向上的Haar小波响应,记为d.和d,同 样赋予权重系数.然后对每个子区域的响应以及响 应的绝对值求和,在每个子区域可以得到一个4维 向量V=(∑d,∑Id.l,∑d,∑Id,I)T,这样16个 ax方向 (b)y方向 (cx-y方向 子区域可形成一个64维的描述向量. 图29×9框状滤波器模板 在获得参考图像和待配准图像的兴趣点及其描 Fig.2 Box filters with 9 x9 述向量后,采用最近距离比次近距离的方法进行兴 尺度空间是按阶分层形成的,SURF采用增大 趣点匹配.设N,、N2分别为图像I1、I2用SURF方法 方框滤波器的尺寸来达到尺度空间分层的效果,尺 提取的兴趣点集合,对N,中的任一兴趣点:,W2 度空间的建立是从9×9的滤波器开始,每一阶分4 中与:的欧氏距离最近和次近的2个兴趣点分别 层.图3为建立4阶的尺度空间,图中方框内的数字 为n、n,对应距离分别为d,d,如果d≤入×d, 表示框状滤波器模板的尺寸,对数横坐标表示相应 则n:与n2为匹配点对,遍历L1中的兴趣点,找出所 的尺度,如滤波器模板尺寸为N×N,则对应的尺度 有潜在的匹配点对.这是可利用Hessian矩阵迹的 为s=1.2×N/9. 正负性来加速匹配,提高匹配效率 对于某一像素点,用近似的Hessian矩阵求出 2.2.3透视变换模型参数估计 极值后,其上一尺度、下一尺度及本尺度可构造一个 获得2帧图像间的匹配点对后,就可以计算图像 3×3×3的立体邻域.在三维尺度空间(x,y,s)中, 间的变换关系.对于存在旋转、缩放、平移变化的运动 进行非最大值抑制,只有比临近的26个点的响应值 模型,可用透视变换模型近似透视变换矩阵M为
·64 智能系统学报 第7卷 「m m2 则轮廓的运动目标图像,在该图像中仍可能残留一 M= ms m6 些孤立的噪声点,利用形态学滤波处理技术对差分 图像进行后处理,通过形态学开、闭运算弥补断裂的 设p=(x1,y)和q=(名2y2)是匹配的兴趣点对,则有 轮廓线和填补空洞,并滤除残留的噪声点,以检测出 2 运动目标区域。 m m3 2.4基于Mean shift的图像分割与精确检测 ms ms Y2 由于差分运算会把运动目标区域扩大,经过上 1 mo- 述差分求积二值化检测得到的包含运动目标区域的 由于最近距离比次近距离匹配方法得到的匹配 图像,很容易出现将背景当做运动目标区域的误检 点对中,还可能有误匹配,因此本文结合RANSAC 情况.此外形态学开运算容易将连接纤细的运动目 算法和最小二乘法计算得到图像间的透视变换关 系[ 标区域割裂开来,造成多检情况的发生.为此,采用 结合Mean shift图像分割方法来精确提取运动目标 2.2.4视频帧配准 轮廓。 在完成透视变换模型参数的求解之后,就要利 基于Mean shi近的图像分割与图像平滑非常类 用得到的透视变换矩阵M把待配准视频帧中的每 似,只需要把收敛到同一点的起始点归为一类,然后 一点映射到参考图像的坐标系中,对待配准的视频 帧进行插值重采样,就可以得到同一坐标系下的配 把这一类的标号赋给这些起始点.在图像分割中有 时还需要把包含像素点太少的区域去掉.该分割方 准结果.常用的插值方法有最近邻法、双线性法、双 法能有效得到图像中物体的轮廓[0 三次卷积法等,本文采用双线性插值的方法 2.5运动目标检测实现算法 2.3差分求积二值化与形态学滤波 综合上述内容,给出SURF特征与Mean shift图 2.3.1差分求积二值化运动目标区域检测 确定了相邻帧之间的透视变换关系后,将后一 像分割相结合的运动目标检测实现算法, 帧按此变换关系与前一帧图像配准,再进行差分运 算法:动态成像条件下基于SURF和Mean shi近 算,以减掉背景图像.理论上对于差分图像来说,只 的运动目标检测, 有运动重叠部分对应的像素值非零,但由于噪声的 输人:连续4帧视频图像Ic1、Ig la、Ic4 影响,差分图像中存在很多虚假的运动目标.为解决 输出:运动目标检测结果R. 这一问题,考虑差分图像之间必然存在运动重叠区 1)基于SURF特征的视频帧配准.先将连续4 域,采用多帧差分求积二值化的方法使差分图像中 帧的原始视频图像Ic1、I2、Lca、I4转化成灰度图像 运动边缘的相关峰更加尖锐,这样就能有效排除噪 Iclc2、lale4 声,正确检测出运动目标区域.因此,采用相邻4帧 a)对连续4帧图像Ic1、Ia、Ica、I4分别进行 差分求积二值化的方法,算式如式(1): SURF兴趣点检测和描述; F'(x,y)=lf(x,y)-f3(x,y)I× b)将Ic和I3、Ic2和Ic4中的兴趣点分别进行匹 1f(x,y)-f4(x,y)1. (1) 配,得到匹配的兴趣点对; 式中:f(x,y)为第1帧图像f2(x,y)为第2帧图像, c)根据Ic1和Ia、I2和Ic4之间匹配的兴趣点 (x,y)为第3帧配准到第1帧得到的图像f(x,y) 对,进行透视变换模型参数的最小二乘估计; 为第4帧配准到第2帧得到的图像,F(x,y)为差分 d)利用双线性插值方法,将Is配准到Ic图像 求积图像.如果图像中没有运动物体,则2幅图像灰 坐标系下、I4配准到I2图像坐标系下,配准结果分 度差为零,只有运动重叠区域会在差分图像中产生 别为Ica1、Ic2 高的相关峰,按阈值α分割得到二值图像F(x,y), 2)差分求积二值化分割与形态学滤波处理 检测出运动目标 a)将配准后的图像Ica1、I42分别与原始图像 F(x,y)=l,F'(,J)≥a; Ic1、Ic2做差分运算,得到差分后的图像Ics、I6; L0,F'(x,y)a. b)将Is、Is相乘,并按阈值a分割得到二值图 与其他方法相比,该方法具有计算简单、精度高 像Ica; 和抗噪性强的优势, c)对Ic进行形态学滤波处理,结果为Ics: 2.3.2形态学滤波后处理 3)基于Mean shift的图像分割与边缘检测.分 经过差分求积二值化处理后,得到了包含不规 别用x:和:(i=1,2,…,n)表示1I4和Ic4分割后图
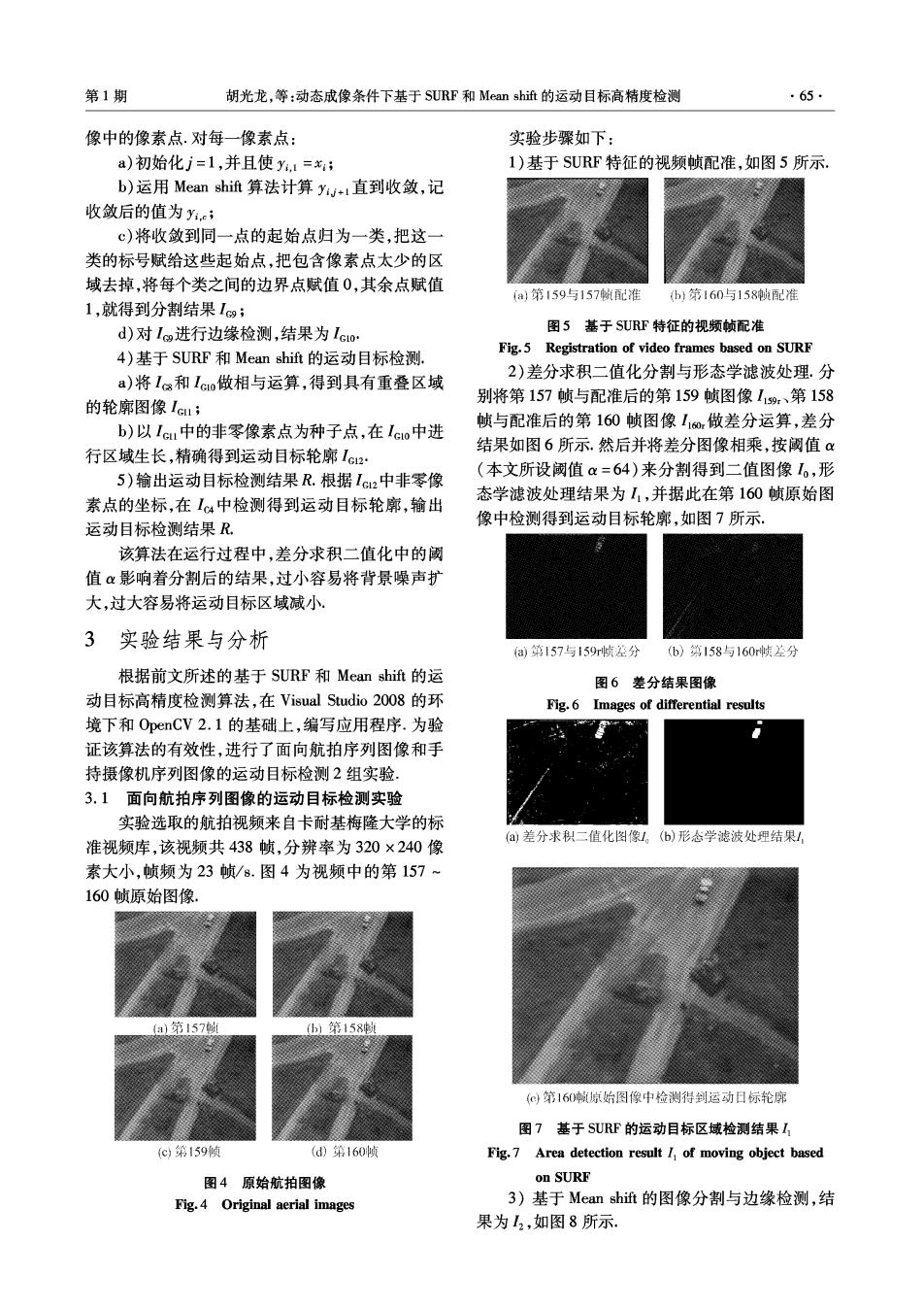
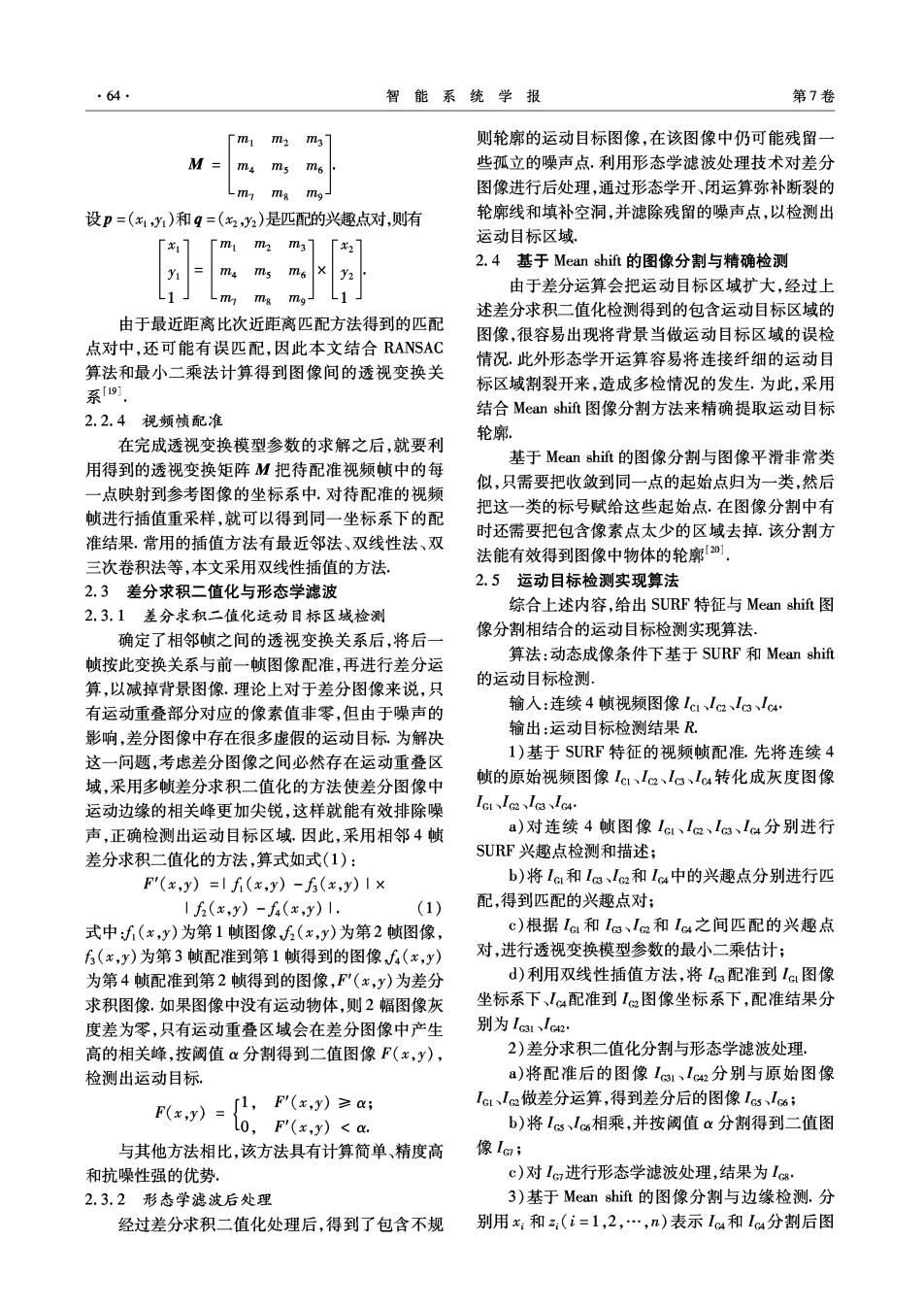
第1期 胡光龙,等:动态成像条件下基于SURF和Mean shift的运动目标高精度检测 ·65 像中的像素点.对每一像素点: 实验步骤如下: a)初始化j=1,并且使y,1=x; 1)基于SURF特征的视频帧配准,如图5所示. b)运用Mean shi讥算法计算yw+i直到收敛,记 收敛后的值为y,c: ©)将收敛到同一点的起始点归为一类,把这一 类的标号赋给这些起始点,把包含像素点太少的区 域去掉,将每个类之间的边界点赋值0,其余点赋值 (a)第159与157懒配准b)第160与158帧配准 1,就得到分割结果Ic9; d)对I进行边缘检测,结果为Ic1o 图5基于SURF特征的视频帧配准 Fig.5 Registration of video frames based on SURF 4)基于SURF和Mean shift的运动目标检测. 2)差分求积二值化分割与形态学滤波处理.分 a)将Ic和Ico做相与运算,得到具有重叠区域 的轮廓图像Ic1; 别将第157帧与配准后的第159帧图像I159.、第158 b)以Ic中的非零像素点为种子点,在Ico中进 帧与配准后的第160帧图像I16.做差分运算,差分 行区域生长,精确得到运动目标轮廓1c2· 结果如图6所示.然后并将差分图像相乘,按阈值α 5)输出运动目标检测结果R.根据Ic2中非零像 (本文所设阈值α=64)来分割得到二值图像1,形 素点的坐标,在Ic4中检测得到运动目标轮廓,输出 态学滤波处理结果为【1,并据此在第160帧原始图 运动目标检测结果R 像中检测得到运动目标轮廓,如图7所示, 该算法在运行过程中,差分求积二值化中的阈 值α影响着分割后的结果,过小容易将背景噪声扩 大,过大容易将运动目标区域减小 3实验结果与分析 a)第I57与159r帧差分 (b)第158与160r帧差分 根据前文所述的基于SURF和Mean shift的运 图6差分结果图像 动目标高精度检测算法,在Visual Studio2008的环 Fig.6 Images of differential results 境下和OpenCV2.1的基础上,编写应用程序.为验 证该算法的有效性,进行了面向航拍序列图像和手 持摄像机序列图像的运动目标检测2组实验. 3.1面向航拍序列图像的运动目标检测实验 实验选取的航拍视频来自卡耐基梅隆大学的标 ()差分求积二值化图像1。(b)形念学滤波处理结果! 准视频库,该视频共438帧,分辨率为320×240像 素大小,帧频为23帧/8.图4为视频中的第157~ 160帧原始图像 (a)第157锁 )第158制 (c)第160惊始图像中检测得到运动日标轮廓 图7基于SURF的运动目标区域检测结果I (c)第159帧 (d)第160帧 Fig.7 Area detection result of moving object based 图4原始航拍图像 on SURF Fig.4 Original aerial images 3)基于Mean shift的图像分割与边缘检测,结 果为2,如图8所示