第6卷第5期 智能系统学报 Vol.6 No.5 2011年10月 CAAI Transactions on Intelligent Systems 0ct.2011 doi:10.3969/j.issn.16734785.2011.05.007 基于频谱分析的Procrustes统计步态识别算法 杨静12,阮秋琦,李小利2 (1.北京交通大学信息科学研究所,北京100044:2.北京交通大学现代信息科学与网络技术北京市重点实验室,北 京100044) 摘要:在信息安全越加重要的现代社会,步态识别以其特有的优势作为一种身份识别手段,得到了很多关注.提出 一种基于Procrustes均值形状的傅里叶频谱分析(FSAOPMS)的适用于多视角的步态识别方法.利用Procrustes统计 形状分析方法将步态序列中人体轮廓的连续步态变化表示成一个紧致的Procrustes均值形状(PMS),将PMIS作为原 始步态特征,对PMS进行傅里叶频谱分析(FSA).计算不同步态序列的PMS幅度谱的欧式距离,利用最近邻(NN)分 类器进行识别.在中国科学院自动化所的CASIA Gait Database数据库上进行了实验,与其他3种方法进行了比较,新 方法具有很高的识别率,证明了该算法的有效性. 关键词:步态识别:Procrustes统计形状分析;Procrustes均值形状(PMS):傅里叶频谱分析(SA):多视角识别 中图分类号:TP391.4文献标志码:A文章编号:16734785(2011)050432-08 A Procrustes statistical gait recognition algorithm based on spectrum analysis YANG Jing2,RUAN Qiuqi',LI Xiaoli.2 (1.Institute of Information Science,Beijing Jiaotong University,Beijing 100044,China;2.Beijing Key Laboratory of Advanced Infor- mation Science and Network Technology,Beijing Jiaotong University,Beijing 100044,China) Abstract:As a special means of identification,gait recognition has acquired a lot of attention in a modern society in which information security has become increasingly important.A multi-view gait recognition algorithm based on the Fourier spectrum analysis of Procrustes mean shape (FSAOPMS)was proposed in this paper.Procrustes shape a- nalysis was used to produce a compact Procrustes mean shape (PMS)from the continuous gesture variation of hu- man body contours in gait sequences.The spectrum of the PMS was analyzed using the Fourier transformation,and the Euclidean distance of the amplitude spectrum of the PMS from various sequences was computed.The classifier was the nearest neighbor (NN).The results of comparison with the other three methods in the CASIA database show that the proposed algorithm is more effective in terms of the recognition accuracy. Keywords:gait recognition;Procrustes statistical shape analysis;Procrustes mean shape (PMS);Fourier spectrum analysis (FSA);multi-view recognition 生物特征识别技术作为一种身份识别手段,已 方法,首先要建立模型,将模型和图像序列进行匹配 成为国际上的研究热点,对信息安全有重要研究意来获得模型参数,使用这些参数作为步态特征进行 义.步态识别就是根据人走路的姿态进行识别,步态 分类,如Cunado等的钟摆模型,Lee等21的椭圆 识别以其固有的优势受到越来越多的关注,其中优 模型,Yoo3]的摆角模型等;非模型的方法,主要是 势有:非入侵性、难以隐藏性、用户接受程度高,因此 根据人体目标移动时所产生时空模式的各类统计值 也涌现了大量的步态识别算法.算法大概可以分为 来提取特征,如Yang等4提出的步态能量图算法, 2种:基于模型和非模型的方法.其中基于模型的 王亮等S)提出的Procrustes均值形状(Procrustes mean shape,PMS)分析法,韩s]提出的傅里叶算子 收稿日期:201102-28. 基金项目:国家自然科学基金资助项目(60973060). 分析法. 通信作者:杨静.E-mail:jingyangsxh@gmail.com. 基于模型的方法计算复杂,而基于非模型的方

第5期 杨静,等:基于频谱分析的Procrustes统计步态识别算法 ·433· 法通常局限于一种特定的特征表示方法,且不能实 1 现多视角的步态识别.受王亮5)和韩的启发,本 预处理 文先利用Procrustes统计形状分析获得步态序列的 在进行特征提取之前需要做一些预处理工作, 均值形状(PMS)作为初级步态特征.然后,对PMS 预处理阶段需要进行人体运动目标的提取,常用的 进行傅里叶频谱分析,将PMS的幅度谱做为最终的 方法有背景减除法、时间差分法、光流法等.基于算 特征,通过欧式距离来表征2个序列之间的相似性. 法复杂性和检测有效性的考虑,采用背景减除的方 在CASIA DataBase B数据库上进行了实验,并与王 法进行运动区域分割.首先,利用背景减除算法,取 亮的PMSI51、,张元元的PMS+TAFI、高海燕的关键 合适的阈值得到二值化的运动目标区域,通常,二值 帧傅里叶变换(FFT of key frames)[8]3种方法进行 化后的运动区域可能会出现空洞、噪声点,如图1 比较,证明了提出的算法能够实现多视角下的高识 (©).然后,采用图像形态学的方法和单连通分量分 别率 析可以得到单连通的运动目标,如图1(d). (a背京顿 )当前锁 (c)有躁声 (d无喋声 图1预处理结果 Fig.1 The results of the preprocessing 2新步态识别算法 括PMS的整体轮廓信息和一些细节信息,这就需要 有一种方法,能够同时表示这2种信息.傅里叶频谱 运动轮廓随时间的变化,是决定人运动特征的一 分析正是这样一个非常有利的工具,频谱的低频部 个重要线索.因此采用了轮廓这一特征来表征人体步 分包含了轮廓的整体信息,而高频部分则包含了细 态运动特征,为了保留序列中多帧图像的轮廓信息,需 节信息 要有一种统计表达方法来表示.Procrustes形状分析 根据以上的理论基础,因此采用Procrustes均值形 法是方向统计学中一种特别流行的方法,它非常适 状的傅里叶频谱分析(Fourier spectrum analysis of Pro- 用于编码2维形状,并且提供了一种很好的工具来寻 crustes mean shape,FSAOPMS),来研究步态识别. 找一组形状的紧致表达—均值形状, CASIA数据库B提供了以下11个(0°~180°) Wang5定义了PMS的相似度测量,实验证明, 运动视角的步态数据库,如图2.利用此数据库来研 此度量方法不能很好地区分PMS之间的相似度.为 究多视角的步态识别。 了更好地测量,需要得到有关PMS的更多信息,包 图211个视角下的图像 Fig.2 The images of 11 different views

·434 智能系统学报 第6卷 2.1提取轮廓线并采样 02=(288°-252)/W2; (4) 2.1.1轮廓的提取—Canny算子 躯干区采样间隔为 Canny算子[o是一种比较新的边缘检测算子, 03=(252°-108)/N3, (5) 具有很好的边缘检测性能,不容易受噪声干扰,能够 本文根据经验知识取N1=N2=80,N3=48,采样结 检测到真正的弱边缘,而且使用2种不同的阈值能 果如图3(d). 分别检测强边缘和弱边缘,并且当弱边缘和强边缘 相连时,才将弱边缘包含在输出图像中.Canny边缘 108°H&S72 检测算子的基本算法分为3个步骤:1)对图像选择 一定的高斯滤波器进行平滑滤波.2)采用非极值抑 T180° P 制(non-maxima suppression)技术对平滑后的图像进 行处理.非极值抑制技术就是:计算平滑后图像的每 270° 个像素处的梯度幅值和方向,梯度方向用来细化边 252eL&F2889 缘,如果像素响应高于梯度方向上它的两相邻点的 a)采样区城 b)Cany边缘提取结果 像素,其值则保留,否则抑制该像素.3)选择跟踪具 有高幅值的轮廓,最后选择满足高阈值和低阈值的 (xV 像素点做为初始点,按顺序跟踪连续的轮廓段.从本 质上讲,Canny边缘检测算子属于具有平滑功能的 一阶微分算子,采样结果如图3(b)所示。 (c等角度采样 d分区域定点采样 H&S:头肩区L&:腿脚区T:躯干区 2.1.2轮廓采样 为了对提取的轮廓线进行Procrustes统计形状 图3采样图像 Fig.3 The images of sampling results 分析,需要将二维的轮廓图像表示成一个一维的向 量,鉴于轮廓的像素点数都不一致,所以本文采用轮 2.2 Procrustes均值形状 廓采样法,提取边缘上的256个点.本文开始采用等 一帧目标图像在提取轮廓和进行采样后,就得 角度采样的方法,结果如图3(©),但是效果不理想, 到了这个轮廓的一维向量表示,由于在采样的过程 因此采用分区域定点采样的方法「8].分区域定点采 中,是从x轴逆时针开始的,于是每帧图像的一维向 样方法的基本思想,就是先计算出轮廓的质心,以此 量的每个元素都是基本对应的,这样就做到了采样 质心作为直角坐标系的原点,边缘上的像素点也就 点匹配.将向量的元素进行逆变换—极坐标到直 有了相应的直角坐标;然后,将边缘上的像素点进行 角坐标的转换,再将每个形状表示成一个复数向量, 坐标变换,变成在极坐标下的形式;最后,对轮廓进 称为配置向量: 行分区域等间隔采样.其中,将人体分成头肩区 0=[4h2…42%]T (72°~108°)、腿脚区(252°~288°)和躯干区(其余 式中::=x+jy:,(,y:)是采样后的轮廓坐标,如 的部分)3个区域,如图3(a)所示. 图3(d).当给定的一个步态序列含有n帧图像时, 理论上质心计算方法如式(1): 就可以得到n个这样的复数向量 得到这n个配置向量之后,就可以利用Procrus- x。=N点 (1) tes形状分析来得到序列的均值形状D.为了计算 式中:N是边缘像素点的个数;(xm,ym)是边缘点的坐 刀,首先计算配置矩阵: 标.由于这种计算质心的方法有时候不能准确地表现 s=分0U 质心,所以,本文提出一种新的计算质心的方法,取轮 台UU: 廓的外接矩形的中心作为轮廓的质心,如式(2): 则Procrustes的均值形状刀对应着矩阵S的最优配 x。=(1+r)/2,y。=(t+b)/2. (2) 置向量,即S的最大特征值对应的特征向量, 式中:1、「、、b是轮廓的外接矩形的左、右、上、下边 综上所述,计算PMS1的步骤如下. 在直角坐标系中的位置 1)得到运动目标的轮廓之后,进行分区域定点 采样间隔如式(3)~(5)所示,头肩区采样间隔为 采样[8],本文采256个点,用这些采样点将每个轮廓 01=(108°-72)/W1; (3) 表示成一个复数向量U(i=1,2,…,n),n是一个步 腿脚区采样间隔为 态序列中的有效帧数
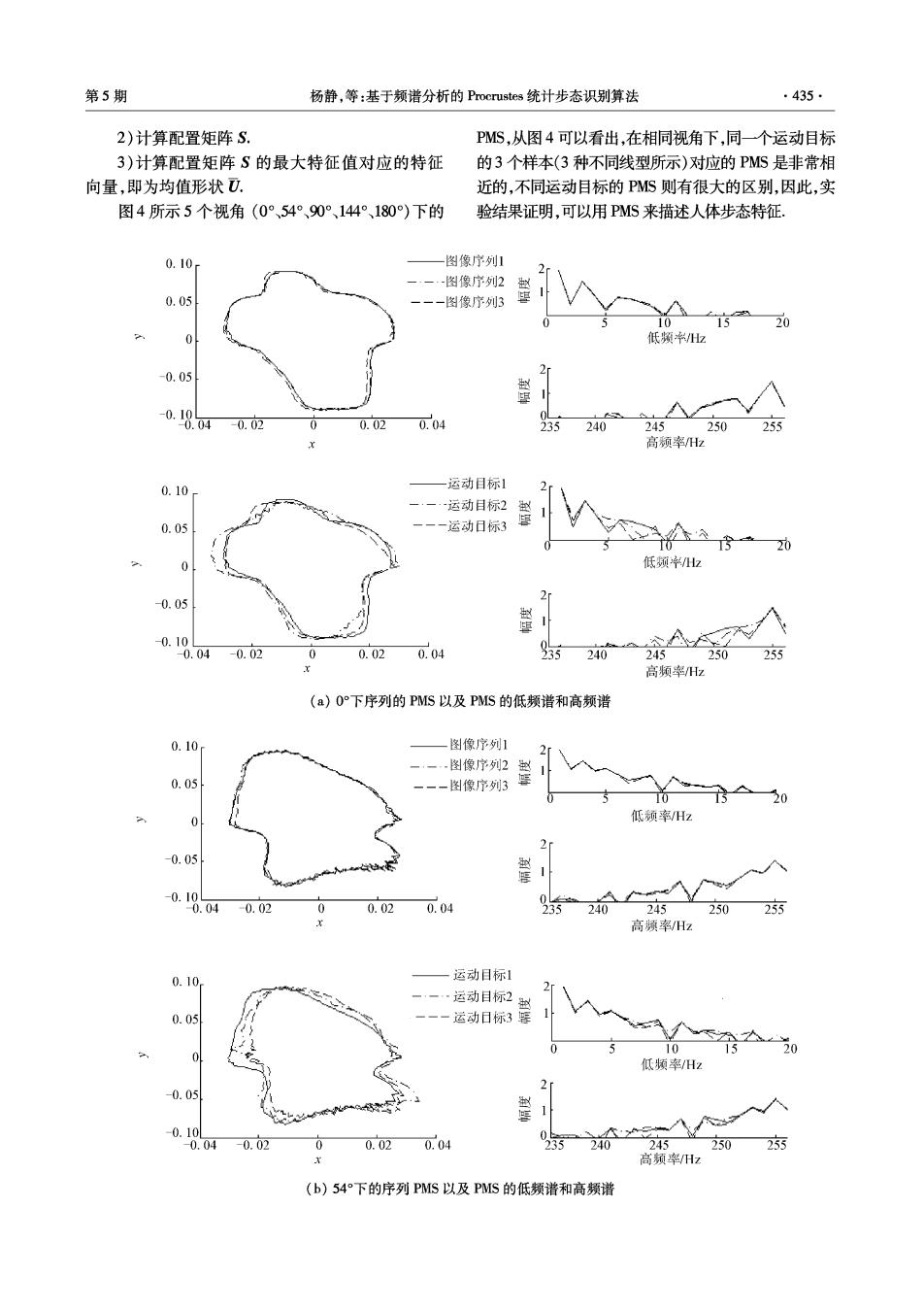
第5期 杨静,等:基于频谱分析的Procrustes统计步态识别算法 ·435 2)计算配置矩阵S. PMS,从图4可以看出,在相同视角下,同一个运动目标 3)计算配置矩阵S的最大特征值对应的特征 的3个样本(3种不同线型所示)对应的PMS是非常相 向量,即为均值形状可, 近的,不同运动目标的PMS则有很大的区别,因此,实 图4所示5个视角(0°54°、90°、14°、180)下的 验结果证明,可以用PMS来描述人体步态特征. 0.10 图像序列1 图像序列2 0.05 一-图像序列3 10 15 0 0 低频*Hz -0.05 -0.10 -0.04 -0.02 0.02 0.04 235 240 245 250255 高频率/Hz 0.10 运动目标】 运动目标2 0.05 一运动日标3 0 20 低频*Hz 2r 0.05 0.10 -0.04 -0.02 0 0.02 0.04 240 245 250 255 高频率Hz (a)O°下序列的PMS以及PMS的低频谱和高颜谱 0.10 图像序列1 一一图像序列2 0.05 一-图像序列3 0 △20 低频率/Hz 2 0.05 -0.1 0.04 -0.02 0.02 0.04 235 240 245 250253 高频率/Hz 0.10 运动目标1 运动目标2 0.05 一一一运动日标3蜉 10 15 低频率/Hz 0.05 1 0.10 、●八 -0.04 -0.02 0 0.02 0.04 235 240 245 250253 高频率/Hz (b)54°下的序列PMS以及PMS的低频诣和高频谱

436. 智能系统学报 第6卷 0.10 图像序列1 一图像序列2 0.05 图像序列3 0 10 入0 15 低频率/Hz 0.05 0.84 -0.02 0.02 0.04 240 245250 255 高频*Hz 0.10 运动日标1 2 运动日标2 0.05 运动目标3 15 低频率/H2 群 0.10 0止个 -0.04 -0.02 0 0.020.040.06 235240 245 250 255 高频率Hz (c)90°下序列的PMS以及PMS的低频谱和高频谐 0.10 图像序列1 一·一…图像序列2 0.05 图像序列3 0 10 0 0 低频*Hz 0.05 0.g-04-0.02 0.02 0.04 240 245250253 高颜Hz 运动目标1 0.10 - 运动目标2 -运动日标3 0.05 10 15 低频率Hz -0.05 -0.10 -0.04 -0.02 0 0.02 0.04 235 240 245 250255 高频率Hz (d)144°下序列的PMS以及PMS的低频谱和高频谱