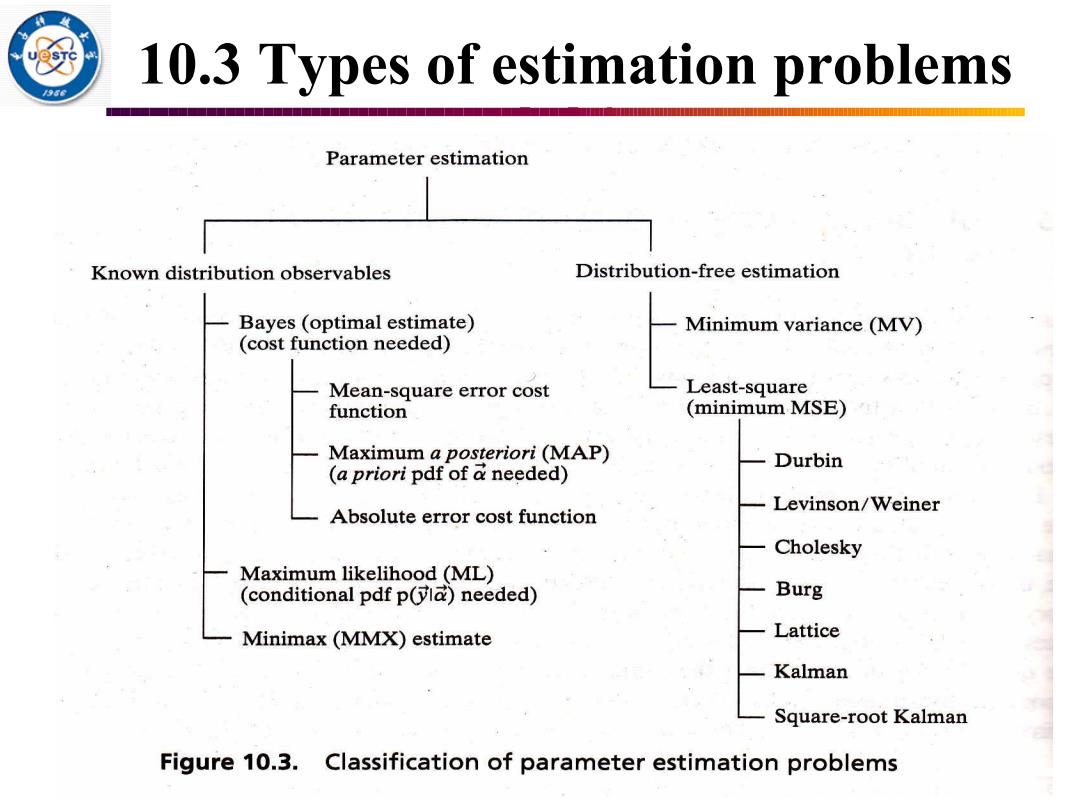
10.3 Types of estimation problems 36 Parameter estimation Known distribution observables Distribution-free estimation Bayes (optimal estimate) Minimum variance (MV) (cost function needed) Mean-square error cost Least-square function (minimum MSE) Maximum a posteriori(MAP) Durbin (a priori pdf of a needed) Levinson/Weiner Absolute error cost function Cholesky Maximum likelihood (ML) (conditional pdf p(la)needed) Burg Minimax (MMX)estimate Lattice Kalman Square-root Kalman Figure 10.3.Classification of parameter estimation problems
6 UESTC 10.3 Types of estimation problems
10.5 Properties of estimators For same observables,we can define different ( How can we comment each a()? ·Unbiased ·Consistent ·Sufficient Minimum-variance estimates (efficient) Asymptotically efficient Asymptotically normal UESTC 7
7 UESTC 10.5 Properties of estimators For same observables, we can define different . How can we comment each ? • Unbiased • Consistent • Sufficient • Minimum-variance estimates (efficient) • Asymptotically efficient • Asymptotically normal α ˆ( y) α ˆ( y)

10.5.1 Unbiased estimates An estimate a(y)is unbiased,if Ea-a is a constant vector E{a=E{a}-n。 is a random vector Asymptotically unbiased estimate lim=F)- UESTC 8
An estimate is unbiased, if 8 UESTC 10.5.1 Unbiased estimates ( ) ˆ y ˆ is a constant vector ˆ E = is a random vector = = Asymptotically unbiased estimate ˆ lim = m E → =

10.5.1 Unbiased estimates In the example 10.1 ·the sample mean Unbiased i)2y· m i= ·The sample variance 6=12(y-) m i=l UESTC 9
9 UESTC 10.5.1 Unbiased estimates In the example 10.1 • the sample mean • The sample variance ( ) 1 1 ˆ=ˆ m i m i= α y y = Unbiased ( ) 2 2 1 1 ˆ ˆ m i m i = = − y
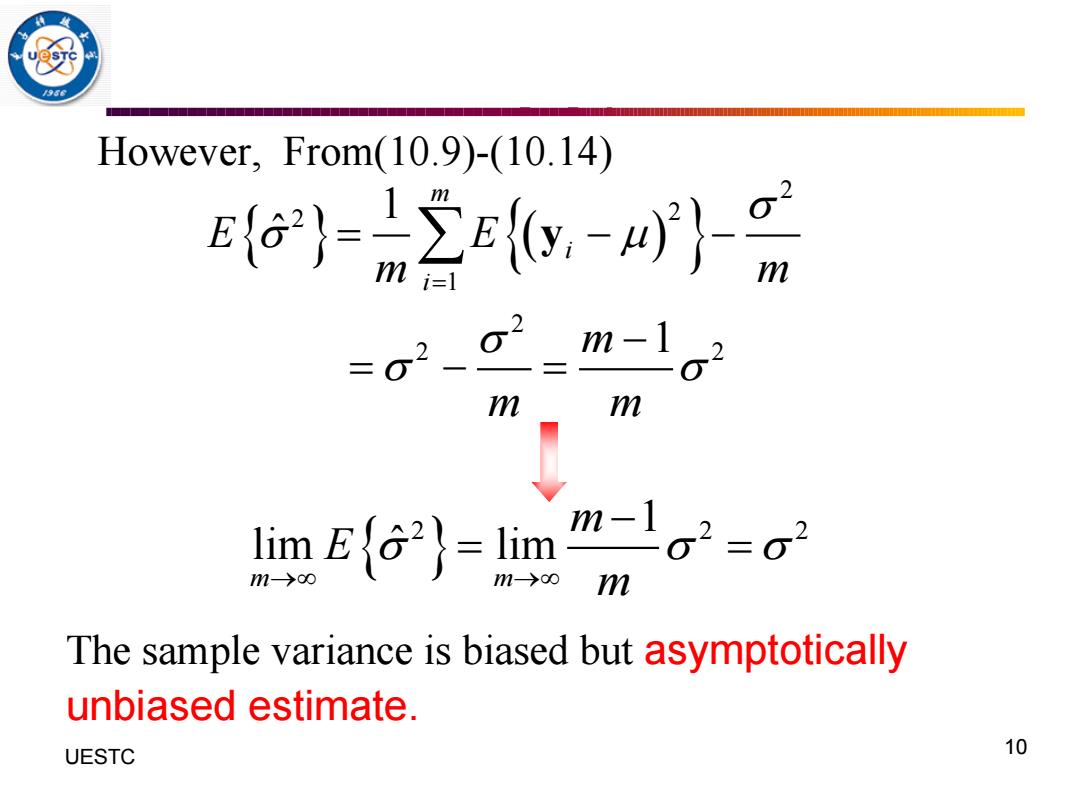
However,From(10.9)-(10.14) Ea}=2c-} m 2 m-1o2 m m lim EG2)-1 lim m-lo2=g2 m→0 m The sample variance is biased but asymptotically unbiased estimate. UESTC 10
10 UESTC However, From(10.9)-(10.14) The sample variance is biased but asymptotically unbiased estimate. ( ) 2 2 2 1 2 2 2 1 ˆ 1 m i i E E m m m m m = = − − − = − = y 2 2 2 1 lim lim ˆ m m m E m → → − = =