(1)受任意荷载作用(或温度变化): M。、M、Qa、Q(可由力法求得):表10-1。 (2)支座移动作用:pA、△、(都假设为正):也可由力法求得 (3)pA、△和荷载共同作用下:由叠加原理: Mu-NeM MB4=0 (2) 也可由(1)式得: Mu=46+2ip,-6A/+M=0 解出ps,代入(1)式就可得(2)式。 3、一端固定,一端定向的单跨超静定梁: 同理可得: Man =ig-igg+M Ma =iga-io+MI (3) 注:①表中杆端内力是根据图示方向的位移方向和荷载情况求得的,当计算某一结构时, 应根据其杆件所受的实际位移方向和荷载情况,判断其杆端内力的正负号。 ②转角位移方程虽是针对单跨超静定梁(等截面)导出的,它们建立的关系对于刚架中 任何一根等截面受弯杆件来说都是适用的。 ③特殊情况:单位角位移或单位线位移下杆件内力图: §8-3位移法的基本未知量和基本结构 根据第一节的分析,我们知道:位移法是以一些结点位移作为基本未知量的,先求 这些位移,再求内力。 那么:到底以那些位移为基本未知量或位移法的基本未知量的数目如何确定呢? 要解决这个问题,首先应该从它的解题思路开始,我们先回顾一下位移法的基本思 路: 原结构(某些结点上加上一定的附加联系,把结点变成固定端或铰支) →基本结构(单跨超静定梁的组合体)再使各附加联系处发生与实际相符的位移。 位移法的基本未知量(当作外因) →原结构,所以根据基本结构在原荷载及这些结点位移共同作用下,在附加联系处 (上)产生的总约束力等于0的平衡条件 一建立位移法的典型方程 →求出这些结点位移未知量(以单跨静定梁的转角位移方程为基础)→最后内力。 显然,位移法的基本未知量数目指的是:原结构→基本结构(附加联系限制的位移
6 (1)受任意荷载作用(或温度变化): f M AB 、 f MBA 、 f QAB 、 f QBA (可由力法求得):表 10-1。 (2)支座移动作用: A、ΔAB、(都假设为正):也可由力法求得 (3)A、ΔAB和荷载共同作用下:由叠加原理: f AB A AB M AB l i M = i − + 3 3 MBA = 0 (2) 也可由(1)式得: 4 2 6 + = 0 = + − f AB BA B A l M BA i M i 解出B,代入(1)式就可得(2)式。 3、一端固定,一端定向的单跨超静定梁: 同理可得: f AB A B M AB M = i −i + f BA B A M BA M = i − i + (3) 注:①表中杆端内力是根据图示方向的位移方向和荷载情况求得的,当计算某一结构时, 应根据其杆件所受的实际位移方向和荷载情况,判断其杆端内力的正负号。 ②转角位移方程虽是针对单跨超静定梁(等截面)导出的,它们建立的关系对于刚架中 任何一根等截面受弯杆件来说都是适用的。 ③特殊情况:单位角位移或单位线位移下杆件内力图: §8-3 位移法的基本未知量和基本结构 根据第一节的分析,我们知道:位移法是以一些结点位移作为基本未知量的,先求 这些位移,再求内力。 那么:到底以那些位移为基本未知量或位移法的基本未知量的数目如何确定呢? 要解决这个问题,首先应该从它的解题思路开始,我们先回顾一下位移法的基本思 路: 原结构(某些结点上加上一定的附加联系,把结点变成固定端或铰支) →基本结构(单跨超静定梁的组合体)再使各附加联系处发生与实际相符的位移。 位移法的基本未知量(当作外因) →原结构,所以根据基本结构在原荷载及这些结点位移共同作用下,在附加联系处 (上)产生的总约束力等于 0 的平衡条件 →建立位移法的典型方程 →求出这些结点位移未知量(以单跨静定梁的转角位移方程为基础)→最后内力。 显然,位移法的基本未知量数目指的是:原结构→基本结构(附加联系限制的位移
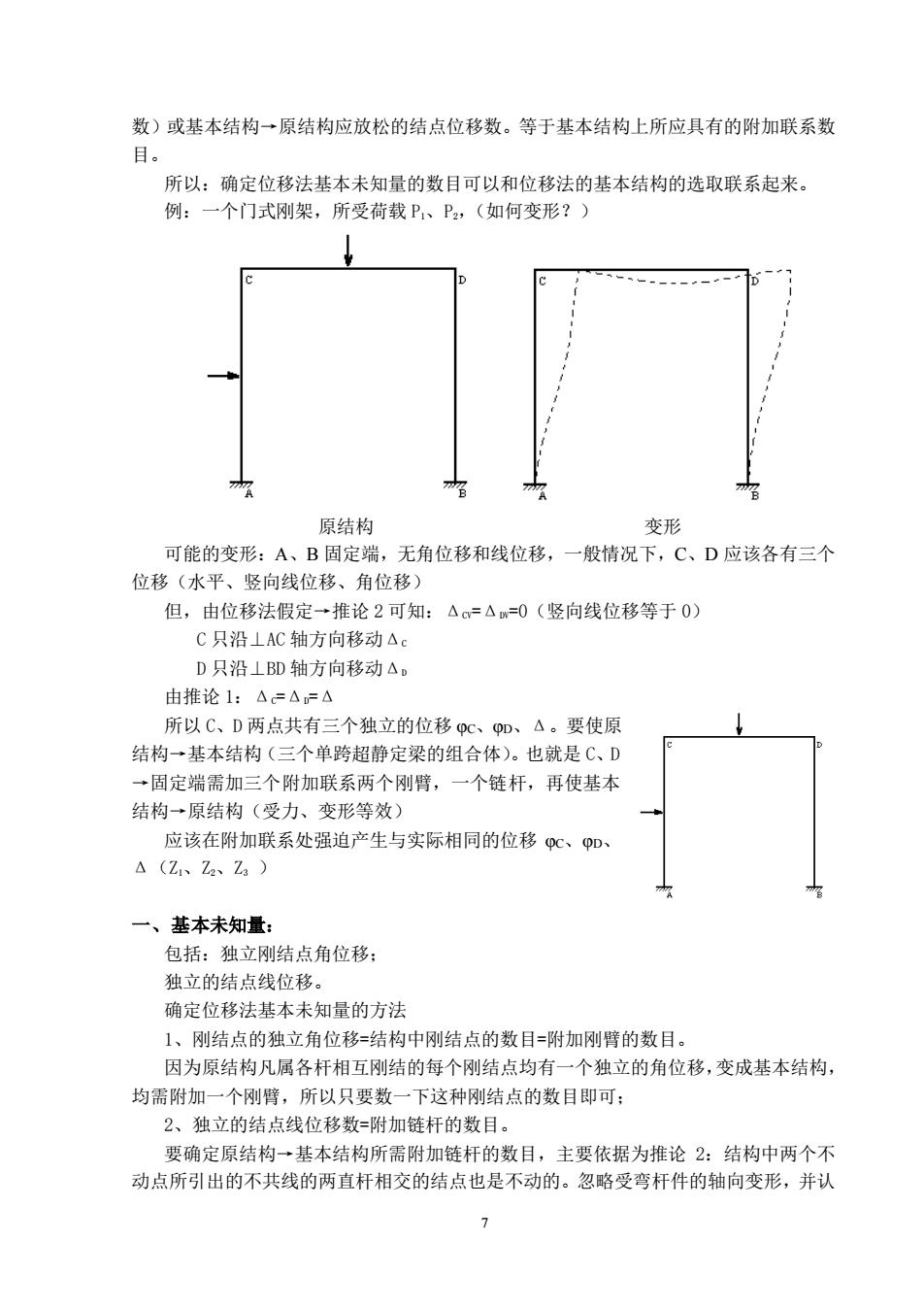
数)或基本结构→原结构应放松的结点位移数。等于基本结构上所应具有的附加联系数 目。 所以:确定位移法基本未知量的数目可以和位移法的基本结构的选取联系起来。 例:一个门式刚架,所受荷载P、P2,(如何变形?) 原结构 变形 可能的变形:A、B固定端,无角位移和线位移,一般情况下,C、D应该各有三个 位移(水平、竖向线位移、角位移) 但,由位移法假定一→推论2可知:△=△w=0(竖向线位移等于0) C只沿⊥AC轴方向移动△。 D只沿⊥BD轴方向移动△。 由推论1:△=△=△ 所以C、D两点共有三个独立的位移pc、pD、△。要使原 结构→基本结构(三个单跨超静定梁的组合体)。也就是C、D 一固定端需加三个附加联系两个刚臂, 一个链杆,再使基本 结构→原结构(受力、变形等效) 应该在附加联系处强迫产生与实际相同的位移pC、p、 △(Z、Z2、Z2) 一、基本未知量: 包括:独立刚结点角位移: 独立的结点线位移。 确定位移法基本未知量的方法 1、刚结点的独立角位移=结构中刚结点的数目=附加刚臂的数目。 因为原结构凡属各杆相互刚结的每个刚结点均有一个独立的角位移,变成基本结构, 均需附加一个刚臂,所以只要数一下这种刚结点的数目即可: 2、独立的结点线位移数=附加链杆的数目。 要确定原结构→基本结构所需附加链杆的数目,主要依据为推论2:结构中两个不 动点所引出的不共线的两直杆相交的结点也是不动的。忽略受弯杆件的轴向变形,并认 >
7 数)或基本结构→原结构应放松的结点位移数。等于基本结构上所应具有的附加联系数 目。 所以:确定位移法基本未知量的数目可以和位移法的基本结构的选取联系起来。 例:一个门式刚架,所受荷载 P1、P2,(如何变形?) 原结构 变形 可能的变形:A、B 固定端,无角位移和线位移,一般情况下,C、D 应该各有三个 位移(水平、竖向线位移、角位移) 但,由位移法假定→推论 2 可知:ΔCV=ΔDV=0(竖向线位移等于 0) C 只沿⊥AC 轴方向移动ΔC D 只沿⊥BD 轴方向移动ΔD 由推论 1:ΔC=ΔD=Δ 所以 C、D 两点共有三个独立的位移 φC、φD、Δ。要使原 结构→基本结构(三个单跨超静定梁的组合体)。也就是 C、D →固定端需加三个附加联系两个刚臂,一个链杆,再使基本 结构→原结构(受力、变形等效) 应该在附加联系处强迫产生与实际相同的位移 φC、φD、 Δ(Z1、Z2、Z3 ) 一、基本未知量: 包括:独立刚结点角位移; 独立的结点线位移。 确定位移法基本未知量的方法 1、刚结点的独立角位移=结构中刚结点的数目=附加刚臂的数目。 因为原结构凡属各杆相互刚结的每个刚结点均有一个独立的角位移,变成基本结构, 均需附加一个刚臂,所以只要数一下这种刚结点的数目即可; 2、独立的结点线位移数=附加链杆的数目。 要确定原结构→基本结构所需附加链杆的数目,主要依据为推论 2:结构中两个不 动点所引出的不共线的两直杆相交的结点也是不动的。忽略受弯杆件的轴向变形,并认