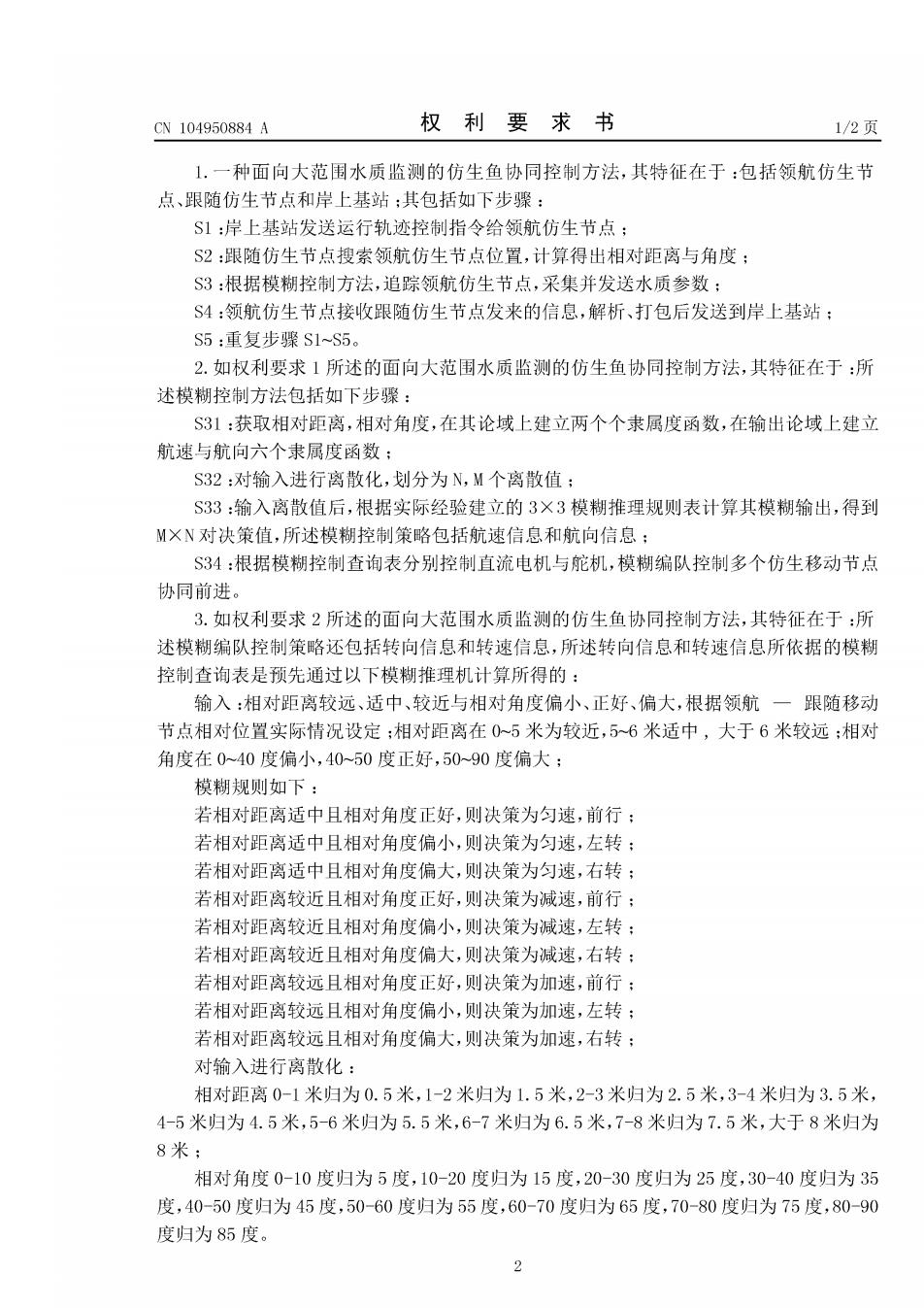
(19)中华人民共和国国家知识产权局 (12)发明专利申请 可 (10)申请公布号CN104950884A (43)申请公布日2015.09.30 (21)申请号201510297915.8 (22)申请日2015.06.03 (71)申请人浙江理工大学 地址310018浙江省杭州市下沙高教园区2 号大街928号 (72)发明人屠德展洪榛潘晓曼裴同豪 王瑞董峻魁 高学江 (74)专利代理机构绍兴市越兴专利事务所 33220 代理人蒋卫东 (51)Int.C1. G05D1/02(2006.01) G01N33/18(2006.01) 权利要求书2页说明书6页附图11页 (54)发明名称 一种面向大范围水质监测的仿生鱼协同控制 方法 (57)摘要 本发明涉及一种面向大范围水质监测的仿生 鱼协同控制方法,其采用多个移动节点编队控制 方式采集水质参数信息。领航仿生节点和跟随仿 生节点采用模仿金枪鱼外观设计。领航仿生节点 浮于水面区域巡游,以水声广播的方式告知水里 的跟随仿生节点队形信息,同时收集跟随仿生节 点采集的水质参数信息,并与岸上基站实现通信。 跟随仿生移动节点接收队形信息后以一定的几何 构型跟随领航仿生节点移动,并采集、发送水质参 数信息。领航与跟随仿生节点间采用水声通信技 术,领航仿生节点与岸上基站间采用GPRS通信技 术。编队系统采用分布式模糊编队控制方式,可以 实现远程控制,测试范围广,精度高,在线监测不 同水域的水质参数,有较好的应用前景。 F9909950 石
CN104950884A 权利要求书 1/2页 1.一种面向大范围水质监测的仿生鱼协同控制方法,其特征在于:包括领航仿生节 点、跟随仿生节点和岸上基站:其包括如下步骤: S1:岸上基站发送运行轨迹控制指令给领航仿生节点; S2:跟随仿生节点搜索领航仿生节点位置,计算得出相对距离与角度: S3:根据模糊控制方法,追踪领航仿生节点,采集并发送水质参数: $4:领航仿生节点接收跟随仿生节点发来的信息,解析、打包后发送到岸上基站: S5:重复步骤S1S5。 2.如权利要求1所述的面向大范围水质监测的仿生鱼协同控制方法,其特征在于:所 述模糊控制方法包括如下步骤: S31:获取相对距离,相对角度,在其论域上建立两个个隶属度函数,在输出论域上建立 航速与航向六个隶属度函数: S32:对输入进行离散化,划分为N,M个离散值: S33:输入离散值后,根据实际经验建立的3×3模糊推理规则表计算其模糊输出,得到 M×N对决策值,所述模糊控制策略包括航速信息和航向信息: S34:根据模糊控制查询表分别控制直流电机与舵机,模糊编队控制多个仿生移动节点 协同前进。 3.如权利要求2所述的面向大范围水质监测的仿生鱼协同控制方法,其特征在于:所 述模糊编队控制策略还包括转向信息和转速信息,所述转向信息和转速信息所依据的模糊 控制查询表是预先通过以下模糊推理机计算所得的: 输入:相对距离较远、适中、较近与相对角度偏小、正好、偏大,根据领航一跟随移动 节点相对位置实际情况设定;相对距离在05米为较近,56米适中,大于6米较远:相对 角度在0~40度偏小,40~50度正好,5090度偏大; 模糊规则如下: 若相对距离适中且相对角度正好,则决策为匀速,前行: 若相对距离适中且相对角度偏小,则决策为匀速,左转: 若相对距离适中且相对角度偏大,则决策为匀速,右转: 若相对距离较近且相对角度正好,则决策为减速,前行: 若相对距离较近且相对角度偏小,则决策为减速,左转: 若相对距离较近且相对角度偏大,则决策为减速,右转: 若相对距离较远且相对角度正好,则决策为加速,前行; 若相对距离较远且相对角度偏小,则决策为加速,左转; 若相对距离较远且相对角度偏大,则决策为加速,右转; 对输入进行离散化: 相对距离0-1米归为0.5米,1-2米归为1.5米,2-3米归为2.5米,3-4米归为3.5米, 4-5米归为4.5米,5-6米归为5.5米,6-7米归为6.5米,7-8米归为7.5米,大于8米归为 8米; 相对角度0-10度归为5度,10-20度归为15度,20-30度归为25度,30-40度归为35 度,40-50度归为45度,50-60度归为55度,60-70度归为65度,70-80度归为75度,80-90 度归为85度。 2
CN104950884A 权利要求书 2/2页 4.如权利要求1所述的面向大范围水质监测的仿生鱼协同控制方法,其特征在于:所 述跟随仿生节点系统包括水质传感器、电荷放大模块、模数转换模块、单片机模块、水声通 信模块、GPS模块、定位模块、姿态检测模块、电机驱动模块、直流电机、舵机和微型水泵, 所述水质传感器采集水质参数信息,所述电荷放大模块与水质传感器、模数转换模块相连, 所述模数转换模块对多个电荷放大模块处理的多路信号同步采样,所述单片机对模数采样 的信号进行处理,所述水声通信模块将单片机输出信号向水里广播或接收指令,所述GRS 模块将单片机输出信号向岸上发送出去或接收指令,所述电机驱动模块驱动直流电机和微 型水泵,所述直流电机、微型水泵和舵机协同运作分别控制仿生移动节点前进、转向以及沉 浮,所述定位模块采集节点位置信息。 5.如权利要求4所述的面向大范围水质监测的仿生鱼协同控制方法,其特征在于:所 述水质参数采集、水声通信系统、动力系统、定位模块和姿态检测模块共用一个微处理器, 所述微处理器为ARM@Cortex T M3内核32位高性能的STM32F103芯片。 6.如权利要求1所述的面向大范围水质监测的仿生鱼协同控制方法,其特征在于:所 述领航仿生节点、跟随仿生节点采用仿金枪鱼的外观设计。 7.如权利要求1所述的面向大范围水质监测的仿生鱼协同控制方法,其特征在于:所 述领航仿生节点和跟随仿生节点间采用水声通信。 3
CN104950884A 说明书 1/6页 一种面向大范围水质监测的仿生鱼协同控制方法 [0001] 【技术领域】 本发明涉及一种水质监测方法,具体涉及一种面向大范围水质监测的仿生鱼协同控制 方法,属于水质监测技术领域。 [0002]【背景技术】 目前,我国的水质监测方法有实验室监测、自动监测和移动监测。实验室监测是通过设 置某些断面定时定点瞬时取样,然后将样品带回实验室进行仪器分析,分析精度虽高但储 存的水样会因为悬浮物的凝聚沉降以及生物的代谢过程、死亡分解过程等的影响而发生改 变,且数据实时性较差。自动监测是设定在流域内的现场水质自动监测站,建设一个自动监 测站需要建造专门的厂房,同时在线水质分析仪器价格也十分昂贵。移动监测多为人工驾 驶的水质监测船,不仅成本高而且存在二次污染。 [0003] 随着物联网技术的兴起,水下监测结合无线传感网越来越受到人们的重视。体积 较小,探测范围广、精度高的移动水质监测节点具有较大的社会价值和经济效益。如何让这 些节点能够组成网络,协同地采集水质参数显得尤为重要。 [0004]因此,为解决上述技术问题,确有必要提供一种创新的面向大范围水质监测的仿 生鱼协同控制方法,以克服现有技术中的所述缺陷。 [0005]【发明内容】 为解决上述技术问题,本发明的目的在于一种体积较小,探测范围广、精度高,可在线 监测不同水域的水质参数的面向大范围水质监测的仿生鱼协同控制方法。 [0006]为实现上述目的,本发明采取的技术方案为:一种面向大范围水质监测的仿生鱼 协同控制方法,其包括领航仿生节点、跟随仿生节点和岸上基站:其包括如下步骤: S1:岸上基站发送运行轨迹控制指令给领航仿生节点: S2:跟随仿生节点搜索领航仿生节点位置,计算得出相对距离与角度: S3:根据模糊控制方法,追踪领航仿生节点,采集并发送水质参数: S4:领航仿生节点接收跟随仿生节点发来的信息,解析、打包后发送到岸上基站: S5:重复步骤S1~S5。 [0007]本发明的面向大范围水质监测的仿生鱼协同控制方法进一步为:所述模糊控制方 法包括如下步骤: S31:获取相对距离,相对角度,在其论域上建立两个个隶属度函数,在输出论域上建立 航速与航向六个隶属度函数: S32:对输入进行离散化,划分为N,M个离散值; S33:输入离散值后,根据实际经验建立的3×3模糊推理规则表计算其模糊输出,得到 MXN对决策值,所述模糊控制策略包括航速信息和航向信息; S34:根据模糊控制查询表分别控制直流电机与舵机,模糊编队控制多个仿生移动节点 协同前进。 [0008]本发明的面向大范围水质监测的仿生鱼协同控制方法进一步为:所述模糊编队控 制策略还包括转向信息和转速信息,所述转向信息和转速信息所依据的模糊控制查询表是 4
CN104950884A 说明书 2/6页 预先通过以下模糊推理机计算所得的: 输入:相对距离较远、适中、较近与相对角度偏小、正好、偏大,根据领航一跟随移动 节点相对位置实际情况设定:相对距离在05米为较近,5~6米适中,大于6米较远:相对 角度在0~40度偏小,40~50度正好,5090度偏大; 模糊规则如下: 若相对距离适中且相对角度正好,则决策为匀速,前行: 若相对距离适中且相对角度偏小,则决策为匀速,左转: 若相对距离适中且相对角度偏大,则决策为匀速,右转: 若相对距离较近且相对角度正好,则决策为减速,前行; 若相对距离较近且相对角度偏小,则决策为减速,左转: 若相对距离较近且相对角度偏大,则决策为减速,右转: 若相对距离较远且相对角度正好,则决策为加速,前行: 若相对距离较远且相对角度偏小,则决策为加速,左转; 若相对距离较远且相对角度偏大,则决策为加速,右转: 对输入进行离散化: 相对距离0-1米归为0.5米,1-2米归为1.5米,2-3米归为2.5米,3-4米归为3.5米, 4-5米归为4.5米,5-6米归为5.5米,6-7米归为6.5米,7-8米归为7.5米,大于8米归为 8米; 相对角度0-10度归为5度,10-20度归为15度,20-30度归为25度,30-40度归为35 度,40-50度归为45度,50-60度归为55度,60-70度归为65度,70-80度归为75度,80-90 度归为85度: 本发明的面向大范围水质监测的仿生鱼协同控制方法进一步为:所述跟随仿生节点系 统包括水质传感器、电荷放大模块、模数转换模块、单片机模块、水声通信模块、GS模块、 定位模块、姿态检测模块、电机驱动模块、直流电机、舵机和微型水泵,所述水质传感器采集 水质参数信息,所述电荷放大模块与水质传感器、模数转换模块相连,所述模数转换模块对 多个电荷放大模块处理的多路信号同步采样,所述单片机对模数采样的信号进行处理,所 述水声通信模块将单片机输出信号向水里广播或接收指令,所述GRS模块将单片机输出 信号向岸上发送出去或接收指令,所述电机驱动模块驱动直流电机和微型水泵,述直流 电机、微型水泵和舵机协同运作分别控制仿生移动节点前进、转向以及沉浮,所述定位模块 采集节点位置信息。 [0009]本发明的面向大范围水质监测的仿生鱼协同控制方法进一步为:所述水质参数采 集、水声通信系统、动力系统、定位模块和姿态检测模块共用一个微处理器,所述微处理器 为ARM⑧Cortex M3内核32位高性能的STM32F103芯片。 [0010]本发明的面向大范围水质监测的仿生鱼协同控制方法进一步为:所述领航仿生节 点、跟随仿生节点采用仿金枪鱼的外观设计。 [0011]本发明的面向大范围水质监测的仿生鱼协同控制方法还可为:所述领航仿生节点 和跟随仿生节点间采用水声通信。 [0012]与现有技术相比,本发明具有如下有益效果: 1.移动节点模仿金枪鱼的外观设计,具有移动速度快,环境适应性强等特点。 5