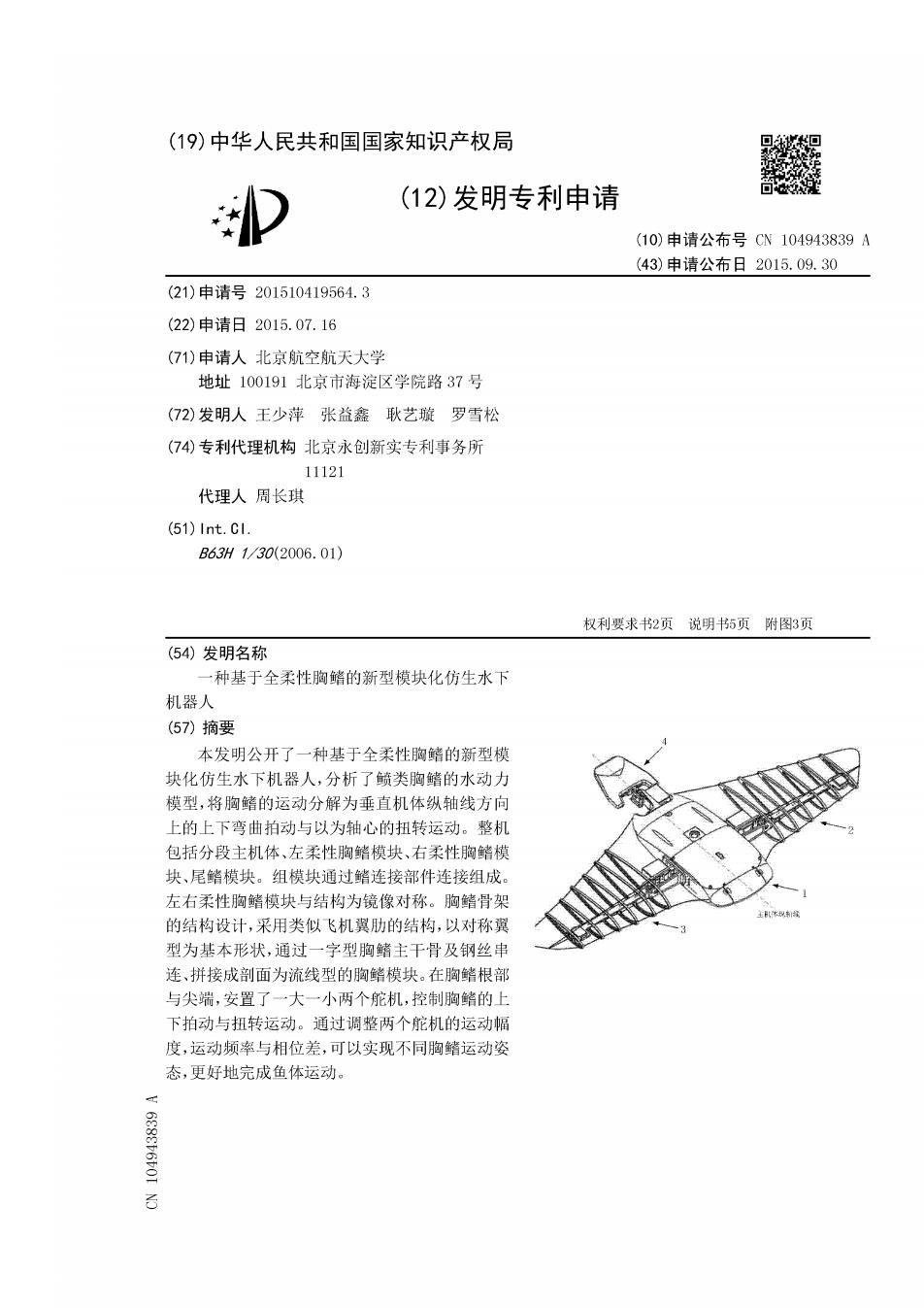
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104943839A (43)申请公布日2015.09.30 (21)申请号201510419564.3 (22)申请日2015.07.16 (71)申请人北京航空航天大学 地址100191北京市海淀区学院路37号 (72)发明人王少萍张益鑫耿艺璇罗雪松 (74)专利代理机构北京永创新实专利事务所 11121 代理人周长琪 (51)1nt.Cl. B63H130(2006.01) 权利要求书2页说明书5页附图3页 (54)发明名称 一种基于全柔性胸鳍的新型模块化仿生水下 机器人 (57)摘要 本发明公开了一种基于全柔性胸鳍的新型模 块化仿生水下机器人,分析了鲼类胸鳍的水动力 模型,将胸鳍的运动分解为垂直机体纵轴线方向 上的上下弯曲拍动与以为轴心的扭转运动。整机 包括分段主机体、左柔性胸鳍模块、右柔性胸鳍模 块、尾鳍模块。组模块通过鳍连接部件连接组成。 左右柔性胸鳍模块与结构为镜像对称。胸鳍骨架 的结构设计,采用类似飞机翼肋的结构,以对称翼 型为基本形状,通过一字型胸鳍主干骨及钢丝串 连、拼接成剖面为流线型的胸鳍模块。在胸鳍根部 与尖端,安置了一大一小两个舵机,控制胸鳍的上 下拍动与扭转运动。通过调整两个舵机的运动幅 度,运动频率与相位差,可以实现不同胸鳍运动姿 态,更好地完成鱼体运动。 石

CN104943839A 权利要求书 1/2页 1.一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在于:包括主机体、左 柔性胸鳍模块、右柔性胸鳍模块与尾鳍模块。左柔性胸鳍模块与右柔性胸鳍模块结构相同, 分别通过鳍部连接件安装在主机体左右两侧,且镜像对称:尾鳍模块通过尾鳍连接件螺钉 连接于主机体后部: 所述左柔性胸鳍模块与右柔性胸鳍模块均包括柔性胸鳍骨架和胸鳍驱动系统:其中, 柔性胸鳍骨架仿飞机机翼机构设计,包括6根鳍肋沿胸鳍展向设置,由根部至尖端的鳍肋 外边框依次等距缩小; 所述胸鳍驱动系统包括两个防水舵机、胸鳍主干骨与两根钢丝:令两个舵机分别为防 水舵机A与防水舵机B:防水舵机A与防水舵机B均具有一字摇臂,驱动一字摇臂转动:防水 舵机A固定安装于胸部连接件上,防水舵机B的一字摇臂两端通过螺钉固定安装在位于尖 端的鳍肋上设计的连接梁上:胸鳍主干骨根部与鳍肋连接件固定,尖端与防水舵机A固定: 除位于根部与尖端鳍肋外,其余鳍肋的上下缘均通过钢杆与胸鳍主干骨固定; 令两根钢丝分别为钢丝A与钢丝B:其中,钢丝A对折后,两端分别由尖端至根部依次 穿过各个鳍肋上下缘通孔后,与防水舵机A中一字摇臂两端铰接:钢丝B弯折后,一端依次 穿过各个鳍肋前缘通孔,与感知舱侧面固定:另一端依次穿过各个鳍肋前缘通孔,与尾舱侧 面固定: 所述尾鳍模块包括尾部定位架、尾部防水舵机、连杆A、连杆B、尾部连接件与尾鳍:其 中,尾部定位架前端与主机体中尾舱后端部固定:尾部防水舵机同样具有一字摇臂:固定 安装在尾部安装架一侧。一字摇臂的两端分别与连杆A和连杆B的一端相连;连杆A与连 杆B另一端与尾部连接件两端铰接:使一字连杆、连杆A、连杆B与尾部连接件间形成平行 四连杆结构:尾部连接件后部设计有连接平面,与尾鳍相连;尾部连接件还与尾部定位架 间铰接; 上述结构水下机器人整体外部包覆有透水弹性蒙皮。 2.一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在于:所述6根鳍肋均 为按对称翼型设计的中空框架结构。 3.如权利要求1所述一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在 于:所述主机体采用分段设计,包括4段舱体,沿主机体纵轴线从前向后依次为感知舱、控 制舱、中段舱、尾舱:其中,感知舱和中段舱通过螺钉与控制舱固连,尾舱通过螺钉与中段舱 固连:中段舱与尾舱内设计有沿机体纵轴线对称分布的蜂窝状配重孔。 4.如权利要求1所述一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在 于:所述防水舵机A与防水舵机B分别采用HitecHS-5646WP金属齿轮数字防水舵机和 HitecHS-82MG金属齿轮小型模拟舵机。 5.如权利要求1所述一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在 于:所述鳍肋前后缘处通孔位于鳍肋对称轴两端,上下缘通孔609距离前缘的位置为鳍肋 总长的2/7,连线与鳍肋的对称轴垂直。 6.如权利要求1所述一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在 于:所述左柔性胸鳍模块与右柔性胸鳍模块中的胸鳍主干骨轴线穿过整个水下机器人的重 心。 7.如权利要求1所述一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在 2
CN104943839A 权利要求书 2/2页 于:所述透水弹性蒙皮材料采用含有DOW XLA纤维的防水、高弹精纺面料,在左柔性胸鳍模 块、右柔性胸鳍模块根部设有可拆卸的拉链。 8.如权利要求1所述一种基于全柔性胸鳍的新型模块化仿生水下机器人,其特征在 于:所述主机体、胸鳍骨架与尾鳍均采用PLA高分子材料3D打印成形。 3
CN104943839A 说明书 1/5页 一种基于全柔性胸鳍的新型模块化仿生水下机器人 技术领域 [0001]本发明属于柔性胸鳍驱动的仿生水下机器人,同时属于模块化设计机器,具体来 说,是一种基于全柔性胸鳍的新型模块化仿生水下机器人。 背景技术 [0002] 仿生鱼是机器人(鱼)研究的重要领域。鱼类经过几亿年漫长的进化过程,形成了 近乎完美的在水中行进的生理结构与运动模式。它们凭借优良流体力学效能的身体结构, 获得极高推进效率和机动性,其性能远远高于螺旋桨推进系统。其中以胸鳍为主要推进来 源的机器鱼凭借其推进效率高、转弯机动性高、运动稳定性等优势得到了科研人员的广泛 关注。由于鱼类的这些优越性,本发明水下机器人(鱼)基于体平扁、宽大于长、具备肥大 胸鳍的蝠鲼进行仿生设计,在军事侦查、水下探测、生物观察、娱乐观赏等多个领域具有极 高的应用价值和广阔的发展前景。 [0003]自然原型为胸鳍摆动推进模式鱼类一一蝠鲼的仿生机器鱼,以其兼具高效率、高 机动性等优势特征成为水下机器人(鱼)的一个热点研究领域。胸鳍摆动推进模式(类似 于鸟类在空中的翅膀拍动)是胸鳍推进模式的一种,具有胸鳍推进模式中最高的推进效率 与速度。通过对蝠鲼、牛鼻鲼实地观测分析和生物学研究成果的总结,得出胸鳍摆动推进模 式鱼类的典型身体结构特征和运动变形规律。当前胸鳍摆动推进仿生鱼研究成果多数基于 刚性机构和类似扑翼附柔性薄膜的驱动机构。具体而言,目前采用胸鳍摆动推进模式仿生 鱼样机的驱动、传动机构、中部机体多是刚性并且分离的,无法产生整体渐变的柔性变形, 造成胸鳍运动过程的柔顺性不足。 发明内容 [0004]本发明设计了主动输出胸鳍全柔性变形结构,以最接近蝠鲼本身运动方式的方法 实现水下机器人胸鳍的全柔性拍动。 [0005]本发明水下机器人包括主机体、左柔性胸鳍模块、右柔性胸鳍模块与尾鳍模块。左 柔性胸鳍模块与右柔性胸鳍模块结构相同,分别通过鳍部连接件安装在主机体左右两侧, 且镜像对称:尾鳍模块通过尾鳍连接件螺钉连接于主机体后部。 [0006]所述左柔性胸鳍模块与右柔性胸鳍模块均包括柔性胸鳍骨架和胸鳍驱动系统。 其中,柔性胸鳍骨架仿飞机机翼机构设计,包括6根鳍肋沿胸鳍展向设置,由根部至尖端的 鳍肋外边框依次等距缩小。 [00071 所述胸鳍驱动系统包括两个防水舵机、胸鳍主干骨与两根钢丝;令两个舵机分别 为防水舵机A与防水舵机B。防水舵机A与防水舵机B均具有一字摇臂,驱动一字摇臂转 动:防水舵机A固定安装于胸部连接件上,防水舵机B的一字摇臂两端通过螺钉固定安装在 位于尖端的鳍肋上设计的连接梁上。胸鳍主干骨根部与鳍肋连接件固定,尖端与防水舵机 A固定:除位于根部与尖端鳍肋外,其余鳍肋的上下缘均通过钢杆与胸鳍主干骨固定。 [0008] 令两根钢丝分别为钢丝A与钢丝B。其中,钢丝A对折后,两端分别由尖端至根部 4
CN104943839A 说 明书 2/5页 依次穿过各个鳍肋上下缘通孔后,与防水舵机A中一字摇臂两端铰接。钢丝B弯折后,一端 依次穿过各个鳍肋前缘通孔,与感知舱侧面固定:另一端依次穿过各个鳍肋前缘通孔,与尾 舱侧面固定。 [0009]所述尾鳍模块包括尾部定位架、尾部防水舵机、连杆A、连杆B、尾部连接件与尾 鳍。其中,尾部定位架前端与主机体中尾舱后端部固定;尾部防水舵机同样具有一字摇臂: 固定安装在尾部安装架一侧。一字摇臂的两端分别与连杆A和连杆B的一端相连:连杆A 与连杆B另一端与尾部连接件两端铰接:使一字连杆、连杆A、连杆B与尾部连接件间形成 平行四连杆结构。尾部连接件后部设计有连接平面,与尾鳍相连:尾部连接件还与尾部定位 架间较接。 [0010]上述结构水下机器人整体外部包覆有透水弹性蒙皮。 [0011] 本发明基于全柔性胸鳍的新型模块化仿生水下机器人,分析了鲼类胸鳍的水动力 模型,将胸鳍的运动分解为垂直机体纵轴线方向上的上下弯曲拍动与以为轴心的扭转运 动。胸鳍骨架的结构设计,采用类似飞机翼肋的结构,以对称翼型为基本形状,通过一字型 胸鳍主干骨及钢丝串连、拼接成剖面为流线型的胸鳍模块。在胸鳍根部与尖端,安置了一大 一小两个舵机,控制胸鳍的上下拍动与扭转运动。通过调整两个舵机的运动幅度,运动频率 与相位差,可以实现不同胸鳍运动姿态,更好地完成鱼体运动。 [0012]本发明的优点在于: [0013]1、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,由流线型柔性胸鳍骨 架、柔性连接传动钢丝及透水弹性蒙皮3者组成的全柔性胸鳍在胸鳍驱动系统作用下可以 产生整体渐变的柔性变形,辅以输出精确舵面作动的尾鳍模块,使机器人水下运动具有高 机动性、高隐蔽性、高效、低频、低阻的特点,整机柔顺减阻性能良好,水下最高运动速度可 达0.7m/s,转弯半径最小为0.1m,2200mAh的锂电池可支持机器人以0.3m/s航速运动2小 时以上; [0014]2、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,主机体头部采用机体纵 剖呈椭圆型形状(曲率半径最小为10mm)过渡,尾部采用机体纵剖成流线型形状(曲率半 径最小为1200m)过渡,水下阻力小,可大大减少能量损耗,提高运动效率,且该设计尺寸 合适不会因为尺寸过大影响机器人的性能: [0015]3、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,整机仿生设计扁平宽 大,整机重心位置可调,极易在水下实现自平衡; [0016]4、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,采用分舱段模块化设计 方法,每个模块独立设计,可根据用户需求改变各个模块设计,提高了水下机器人的研发效 率和便携性; [0017]5、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,主机体采用分舱段模块 化设计,各个模块分别单独设计,在设计制作的最后阶段,将各个模块按预先设定的机械和 电气接口快速连接到一起,即可完成整机的装配,提高了设计和装配的效率,并且可以根据 机器人用途和性能需求改变各个模块的设计,快速实现产品的二次开发,缩短研发周期。 [0018]6、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,主机体采用分舱段局部 密封、机械传动及电气接口都按照相应防水标准设计,使其具有良好的密封效果: [0019]7、本发明基于全柔性胸鳍的新型模块化仿生水下机器人,主机体上采用易于连接 5