《机电一体化系统设计》实验指导书 机械电气工程学院
1 《机电一体化系统设计》实验指导书 机械电气工程学院
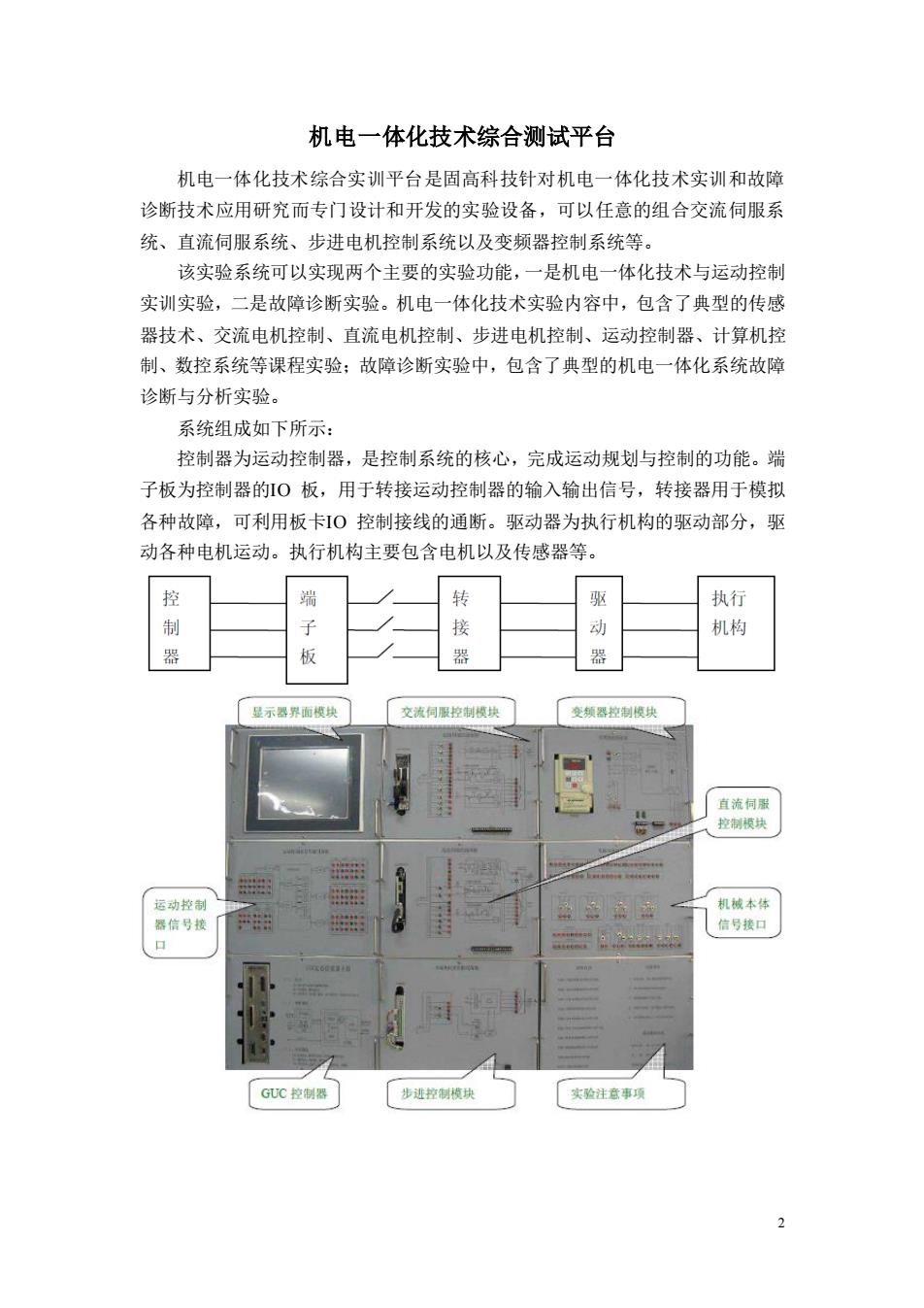
机电一体化技术综合测试平台 机电一体化技术综合实训平台是固高科技针对机电一体化技术实训和故障 诊断技术应用研究而专门设计和开发的实验设备,可以任意的组合交流伺服系 统、直流伺服系统、步进电机控制系统以及变频器控制系统等。 该实验系统可以实现两个主要的实验功能,一是机电一体化技术与运动控制 实训实验,二是故障诊断实验。机电一体化技术实验内容中,包含了典型的传感 器技术、交流电机控制、直流电机控制、步进电机控制、运动控制器、计算机控 制、数控系统等课程实验:故障诊断实验中,包含了典型的机电一体化系统故障 诊断与分析实验。 系统组成如下所示: 控制器为运动控制器,是控制系统的核心,完成运动规划与控制的功能。端 子板为控制器的0板,用于转接运动控制器的输入输出信号,转接器用于模拟 各种故障,可利用板卡IO控制接线的通断。驱动器为执行机构的驱动部分,驱 动各种电机运动。执行机构主要包含电机以及传感器等。 执行 制 动 机构 显示器界模块 交流饲假控制榄块 变频器控制模块 机械本体 1位号接口 「GUC控制器 步进控制模块 实验注意事项
2 机电一体化技术综合测试平台 机电一体化技术综合实训平台是固高科技针对机电一体化技术实训和故障 诊断技术应用研究而专门设计和开发的实验设备,可以任意的组合交流伺服系 统、直流伺服系统、步进电机控制系统以及变频器控制系统等。 该实验系统可以实现两个主要的实验功能,一是机电一体化技术与运动控制 实训实验,二是故障诊断实验。机电一体化技术实验内容中,包含了典型的传感 器技术、交流电机控制、直流电机控制、步进电机控制、运动控制器、计算机控 制、数控系统等课程实验;故障诊断实验中,包含了典型的机电一体化系统故障 诊断与分析实验。 系统组成如下所示: 控制器为运动控制器,是控制系统的核心,完成运动规划与控制的功能。端 子板为控制器的IO 板,用于转接运动控制器的输入输出信号,转接器用于模拟 各种故障,可利用板卡IO 控制接线的通断。驱动器为执行机构的驱动部分,驱 动各种电机运动。执行机构主要包含电机以及传感器等
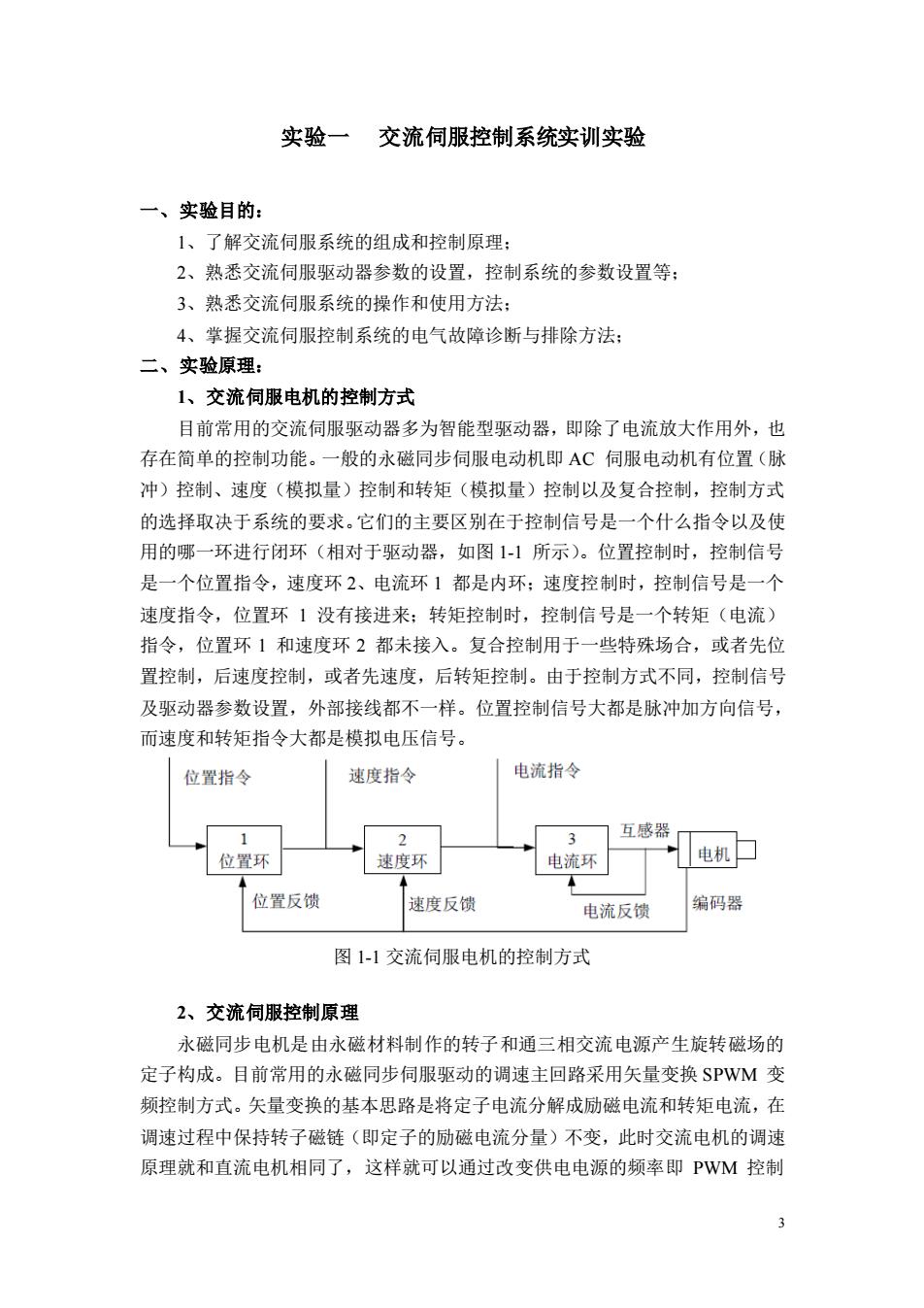
实验一交流伺服控制系统实训实验 一、实验目的: 1、了解交流伺服系统的组成和控制原理: 2、熟悉交流伺服驱动器参数的设置,控制系统的参数设置等: 3、熟悉交流伺服系统的操作和使用方法: 4、掌握交流伺服控制系统的电气故障诊断与排除方法: 二、实验原理: 1、交流伺服电机的控制方式 目前常用的交流伺服驱动器多为智能型驱动器,即除了电流放大作用外,也 存在简单的控制功能。一般的永磁同步伺服电动机即AC伺服电动机有位置(脉 冲)控制、速度(模拟量)控制和转矩(模拟量)控制以及复合控制,控制方式 的选择取决于系统的要求。它们的主要区别在于控制信号是一个什么指令以及使 用的哪一环进行闭环(相对于驱动器,如图1】所示)。位置控制时,控制信号 是一个位置指令,速度环2、电流环1都是内环:速度控制时,控制信号是一个 速度指令,位置环1没有接进来:转矩控制时,控制信号是一个转矩(电流) 指令,位置环1和速度环2都未接入。复合控制用于一些特殊场合,或者先位 置控制,后速度控制,或者先速度,后转矩控制。由于控制方式不同,控制信号 及驱动器参数设置,外部接线都不一样。位置控制信号大都是脉冲加方向信号, 而速度和转矩指令大都是模拟电压信号。 位置指令 速度指令 电流指令 互感器 位置环 速度环 电流环 电机口 位置反馈 速度反馈 电流反馈 编码器 图11交流伺服电机的控制方式 2、交流伺服控制原理 永磁同步电机是由永磁材料制作的转子和通三相交流电源产生旋转磁场的 定子构成。目前常用的永磁同步伺服驱动的调速主回路采用矢量变换SPWM变 频控制方式。矢量变换的基本思路是将定子电流分解成励磁电流和转矩电流,在 调速过程中保持转子磁链(即定子的励磁电流分量)不变,此时交流电机的调速 原理就和直流电机相同了,这样就可以通过改变供电电源的频率即PWM控制 3
3 实验一 交流伺服控制系统实训实验 一、实验目的: 1、了解交流伺服系统的组成和控制原理; 2、熟悉交流伺服驱动器参数的设置,控制系统的参数设置等; 3、熟悉交流伺服系统的操作和使用方法; 4、掌握交流伺服控制系统的电气故障诊断与排除方法; 二、实验原理: 1、交流伺服电机的控制方式 目前常用的交流伺服驱动器多为智能型驱动器,即除了电流放大作用外,也 存在简单的控制功能。一般的永磁同步伺服电动机即 AC 伺服电动机有位置(脉 冲)控制、速度(模拟量)控制和转矩(模拟量)控制以及复合控制,控制方式 的选择取决于系统的要求。它们的主要区别在于控制信号是一个什么指令以及使 用的哪一环进行闭环(相对于驱动器,如图 1-1 所示)。位置控制时,控制信号 是一个位置指令,速度环 2、电流环 1 都是内环;速度控制时,控制信号是一个 速度指令,位置环 1 没有接进来;转矩控制时,控制信号是一个转矩(电流) 指令,位置环 1 和速度环 2 都未接入。复合控制用于一些特殊场合,或者先位 置控制,后速度控制,或者先速度,后转矩控制。由于控制方式不同,控制信号 及驱动器参数设置,外部接线都不一样。位置控制信号大都是脉冲加方向信号, 而速度和转矩指令大都是模拟电压信号。 图 1-1 交流伺服电机的控制方式 2、交流伺服控制原理 永磁同步电机是由永磁材料制作的转子和通三相交流电源产生旋转磁场的 定子构成。目前常用的永磁同步伺服驱动的调速主回路采用矢量变换 SPWM 变 频控制方式。矢量变换的基本思路是将定子电流分解成励磁电流和转矩电流,在 调速过程中保持转子磁链(即定子的励磁电流分量)不变,此时交流电机的调速 原理就和直流电机相同了,这样就可以通过改变供电电源的频率即 PWM 控制

来实现调速了。固高机电一体化技术综合测试平台采用的松下交流伺服电动机, 驱动器也是采用矢量变换正弦波PWM控制方式,由内部微处理器对定子电流 进行矢量变换运算,然后进行PWM调制来调速。其控制原理方框图如图12所 示,控制框图只画出了速度环和电流环部分。光电编码器产生的脉冲信号经速度 解码器处理成数字信号直接送到CPU,在数字调节器中与速度给定信号进行比 较运算(PID)后产生三相交流的电流幅值信号M。为了提高速度调节品质,现 在的驱动器大都采用了以下两项关键技术:一是在速度解码器中采用MT测速 方法,即在电动机高速运转时,通过记录单位时间内的脉冲个数来实现速度测量, 而在电动机低速运转时,通过记录两脉冲之间的时间长短来实现速度测量。这样 无论是在高速或低速时都能很准确的测定电动机的转速。二是数字调节器算法中 采用先进的滑模算法,这种算法根据电动机在高速和低速运行状态上的不同特 性,分别给定不同的PID调节参数,使各阶段的参数都能得到优化。这样就使 电动机在低速运行时平稳性好,高速时跟随误差小,松下伺服驱动器采用了这种 算法。 过压欠压 目目 体 直流过流 交流过流 断相 制动。释能 转速给定 速度湖节m 数字乘法器 制动控制速鲜码器 位置解码器 做处押器系统 图12交流伺服控制原理 为生成三相交流电,需通过乘法器将电流幅值信号IM与电动机转子位置信 号0通过矢量乘法运算来合成(按以下公式)。位置信号0由光电编码器产生的 脉冲信号经位置解码器处理成数字的电动机转子角位置
4 来实现调速了。固高机电一体化技术综合测试平台采用的松下交流伺服电动机, 驱动器也是采用矢量变换正弦波 PWM 控制方式,由内部微处理器对定子电流 进行矢量变换运算,然后进行 PWM 调制来调速。其控制原理方框图如图 1-2 所 示,控制框图只画出了速度环和电流环部分。光电编码器产生的脉冲信号经速度 解码器处理成数字信号直接送到 CPU,在数字调节器中与速度给定信号进行比 较运算(PID)后产生三相交流的电流幅值信号 IM。为了提高速度调节品质,现 在的驱动器大都采用了以下两项关键技术:一是在速度解码器中采用 M/T 测速 方法,即在电动机高速运转时,通过记录单位时间内的脉冲个数来实现速度测量, 而在电动机低速运转时,通过记录两脉冲之间的时间长短来实现速度测量。这样 无论是在高速或低速时都能很准确的测定电动机的转速。二是数字调节器算法中 采用先进的滑模算法,这种算法根据电动机在高速和低速运行状态上的不同特 性,分别给定不同的 PID 调节参数,使各阶段的参数都能得到优化。这样就使 电动机在低速运行时平稳性好,高速时跟随误差小,松下伺服驱动器采用了这种 算法。 图 1-2 交流伺服控制原理 为生成三相交流电,需通过乘法器将电流幅值信号 IM 与电动机转子位置信 号θ通过矢量乘法运算来合成(按以下公式)。位置信号θ由光电编码器产生的 脉冲信号经位置解码器处理成数字的电动机转子角位置

i.=lsin 0 i,=sin(0+120) i.=Isin(0+240) 当三相电流获得后送入电流调节器同反馈回来的电流信号进行比较运算后 经PWM调制后到驱动电路,最后驱动伺服电动机工作。除了这些基本结构外, 电路中还加入了故障处理和保护环节,如过压、欠压、过流、断相及电动机过热 等硬件检测及保护电路。一旦出现故障将通知CPU并封锁输出。 同步电机转子转速与定子旋转磁场的转速相同,当电源频率不变时,同步电 动机的转速为常数,与负载无关。 n=%,=60f (f为电源频率,p为转子磁极极对数) 同步电机的转速正比于电源的线电压(在额定速度以内,超出额定速度时由 于弱磁控制,电压将被嵌位于定值),这就是永磁同步伺服电机的调节特性。交 流永磁同步电机在额定速度以内具有恒转矩的特性,超出额定速度后,由于弱磁 控制,具有恒功率的特性。这样在额定速度以内,负载一定时,交流永磁同步伺 服电机就不像步进电机、直流伺服电机一样,随者速度的增加,输出转矩下降。 这样的特性非常适合于恒转矩类型的负载,比如机床的进给系统。 交流电机的输出功率计算公式为: W=VxN (所单位瓦,:单位转/分,:单位牛.米) 9.55 由上式可以看出,在负载一定时,伺服电机的输出功率同速度成正比。交流 伺服驱动器输入功率计算公式为: W。=V√3×U×I (:线电压,:线电流) 三、实验设备: 机电一体化综合测试平台(含交流伺服控制模块)1台 交流伺服控制面板具体结构图(驱动器部分),如图13所示,主要包括电 机连接线、编码器反馈信号、与运动控制器相连信号以及驱动器本体组成:
5 当三相电流获得后送入电流调节器同反馈回来的电流信号进行比较运算后 经 PWM 调制后到驱动电路,最后驱动伺服电动机工作。除了这些基本结构外, 电路中还加入了故障处理和保护环节,如过压、欠压、过流、断相及电动机过热 等硬件检测及保护电路。一旦出现故障将通知 CPU 并封锁输出。 同步电机转子转速与定子旋转磁场的转速相同,当电源频率不变时,同步电 动机的转速为常数,与负载无关。 同步电机的转速正比于电源的线电压(在额定速度以内,超出额定速度时由 于弱磁控制,电压将被嵌位于定值),这就是永磁同步伺服电机的调节特性。交 流永磁同步电机在额定速度以内具有恒转矩的特性,超出额定速度后,由于弱磁 控制,具有恒功率的特性。这样在额定速度以内,负载一定时,交流永磁同步伺 服电机就不像步进电机、直流伺服电机一样,随着速度的增加,输出转矩下降。 这样的特性非常适合于恒转矩类型的负载,比如机床的进给系统。 交流电机的输出功率计算公式为: 由上式可以看出,在负载一定时,伺服电机的输出功率同速度成正比。交流 伺服驱动器输入功率计算公式为: 三、实验设备: 机电一体化综合测试平台(含交流伺服控制模块) 1 台 交流伺服控制面板具体结构图(驱动器部分),如图 1-3 所示,主要包括电 机连接线、编码器反馈信号、与运动控制器相连信号以及驱动器本体组成;