
交流驱动要 控制信号 同服控制面板 电机 腿 图1-3交流伺服驱动面板 (1)电机连接线 U,V,W信号为交流伺服电机的电源线,PE为接地线。 (2)本体编码器反馈信号 A+,A-B+,B-C+,C-本体反馈到驱动器的编码器信号: 5+,0V 一编码器的电源信号: 此处采用的是增量式编码器,用于反馈电机轴的实际位置。 (3)连接运动控制器信号 A/A.B/B.C./C- 为驱动器反馈给运动器控制器的编码器信号: +5V 为编码器提供电源: PUL+.PUL 一为脉冲信号,用于位置模式下的电机控制: DIR+.DIR-- 一为方向信号,用于位置模式下的电机控制: DAC- 一一为驱动器接受的模拟控制信号,范围一般为 -10V-1OV,用于速度模式下的电机控制: OGND,OVCC,GND--分别为电源地,电源和数字地: RESET -驱动器的复位信号: ALM-- 驱动器的报警信号: EnABLe -驱动器的使能信号: 四、实验任务与步骤: 1、接线实验
6 图 1-3 交流伺服驱动面板 (1)电机连接线 U,V,W 信号为交流伺服电机的电源线,PE 为接地线。 (2)本体编码器反馈信号 A+,A-,B+,B-,C+,C- ---本体反馈到驱动器的编码器信号; 5+,0V---------------------编码器的电源信号; 此处采用的是增量式编码器,用于反馈电机轴的实际位置。 (3)连接运动控制器信号 A,/A,B,/B,C,/C ---------为驱动器反馈给运动器控制器的编码器信号; +5V ----------------------为编码器提供电源; PUL+,PUL- -------------为脉冲信号,用于位置模式下的电机控制; DIR+,DIR- --------------为方向信号,用于位置模式下的电机控制; DAC ---------------------为驱动器接受的模拟控制信号,范围一般为 -10V-10V,用于速度模式下的电机控制; OGND,OVCC,GND----分别为电源地,电源和数字地; RESET--------------------驱动器的复位信号; ALM----------------------驱动器的报警信号; ENABLE-----------------驱动器的使能信号; 四、 实验任务与步骤: 1、接线实验
根据电气连接图搭建交流伺服运动控制系统,具体接线步骤如下所示: 1)电机电源接线 将交流伺服控制面板上左上角的电机动力线接口“U,V,W,PE”分别和 机械本体信号接口面板上的“U,V,W,PE”相连Notel): 交流伺服控制面板 机械本体信号接口面板 机械本体信号 U X结电机信号 MA A Notel: 当交流轴位于X轴时,与机械本体信号接口面板的X轴电机信号部分的信 号相连接: 当交流轴位于Y轴时,与机械本体信号接口面板的Y轴电机信号部分的信 号相连接: 当交流轴位于Z轴时,与机械本体信号接口面板的Z轴电机信号部分的信 号相连接: 2)机械本体编码器反馈到驱动器连接 将交流伺服控制面板上左下角的编码器信号A+、A-、B+、B-、C+、C、5+、 OV和机械本体信号接口面板的A+、A-、B+、B-、C+、C-、5、0V一一连接 (Note2): 交流句服控制面板 机械本体信号接口面板 轴线码器雅号
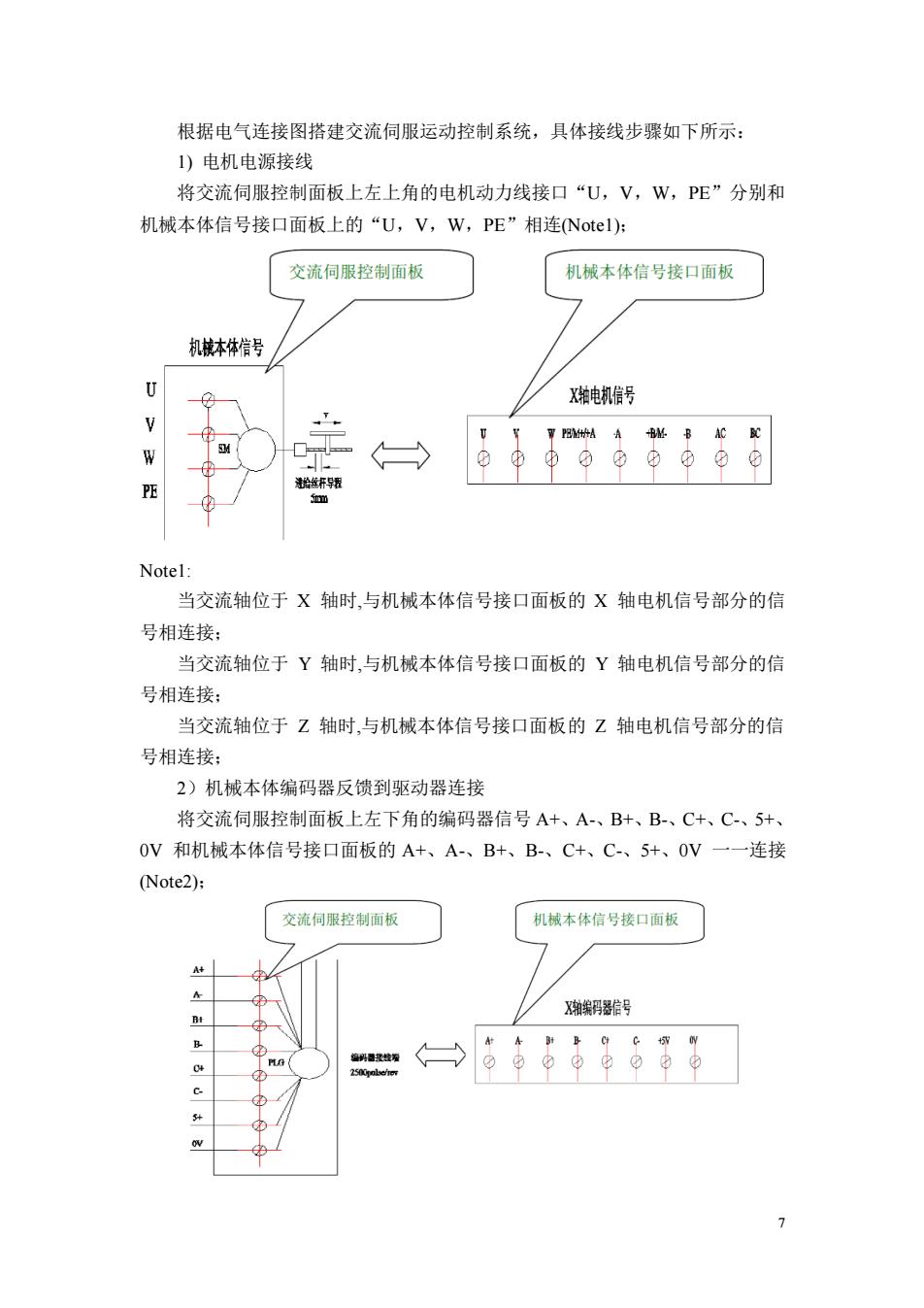
7 根据电气连接图搭建交流伺服运动控制系统,具体接线步骤如下所示: 1) 电机电源接线 将交流伺服控制面板上左上角的电机动力线接口“U,V,W,PE”分别和 机械本体信号接口面板上的“U,V,W,PE”相连(Note1); Note1: 当交流轴位于 X 轴时,与机械本体信号接口面板的 X 轴电机信号部分的信 号相连接; 当交流轴位于 Y 轴时,与机械本体信号接口面板的 Y 轴电机信号部分的信 号相连接; 当交流轴位于 Z 轴时,与机械本体信号接口面板的 Z 轴电机信号部分的信 号相连接; 2)机械本体编码器反馈到驱动器连接 将交流伺服控制面板上左下角的编码器信号 A+、A-、B+、B-、C+、C-、5+、 0V 和机械本体信号接口面板的 A+、A-、B+、B-、C+、C-、5+、0V 一一连接 (Note2);
Note2: 当交流轴位于X轴时,与机械本体信号接口面板的X轴编码器信号部分的 信号相连接: 当交流轴位于Y轴时与机械本体信号接口面板的Y轴编码器信号部分的 信号相连接: 当交流轴位于Z轴时,与机械本体信号接口面板的Z轴编码器信号部分的 信号相连接; 3)驱动器和运动控制器之间的连接线 a以、交流伺服驱动器为位置模式时、控制指令为脉冲+方向: 将交流伺服控制面板上右边PUL+、PUL-、DIR+、DIR.、OGND、+5V、OVCC、 GND、RESET、ALM、ENABLE信号和机械本体接口面板的PUL+、PUL、DIR+ DIR、+5V、OGND、OVCC、GND、RESET、ALM、ENABLE一一相连接: b以、交流伺服驱动器为速度模式时,控制指令为模拟电压信号: 将交流伺服控制面板上右边A、A、B、B、C、/C、+5V、OGND、OVCC GND、DAC、RESET、ALM、ENABLE信号和运动控制器信号接口面板的A、 IA、B、B、C、/C、+5V、OGND、OVCC、GND、DAC、RESET、ALM、ENABLE 相连接Note3): 交流何服控制面板 运动控制器信号接口面 RESET Note3: 当交流轴位于X轴时,与运动控制器接口面板的X轴的信号相连接: 当交流轴位于Y轴时,与运动控制器接口面板的Y轴的信号相连接: 当交流轴位于Z轴时,与运动控制器接口面板的Z轴的信号相连接 4)机械本体和运动控制器之间的连接线 a、将机械本体信号接口面板上的HOME、LIMH、LIM.与运动控制器信号接口
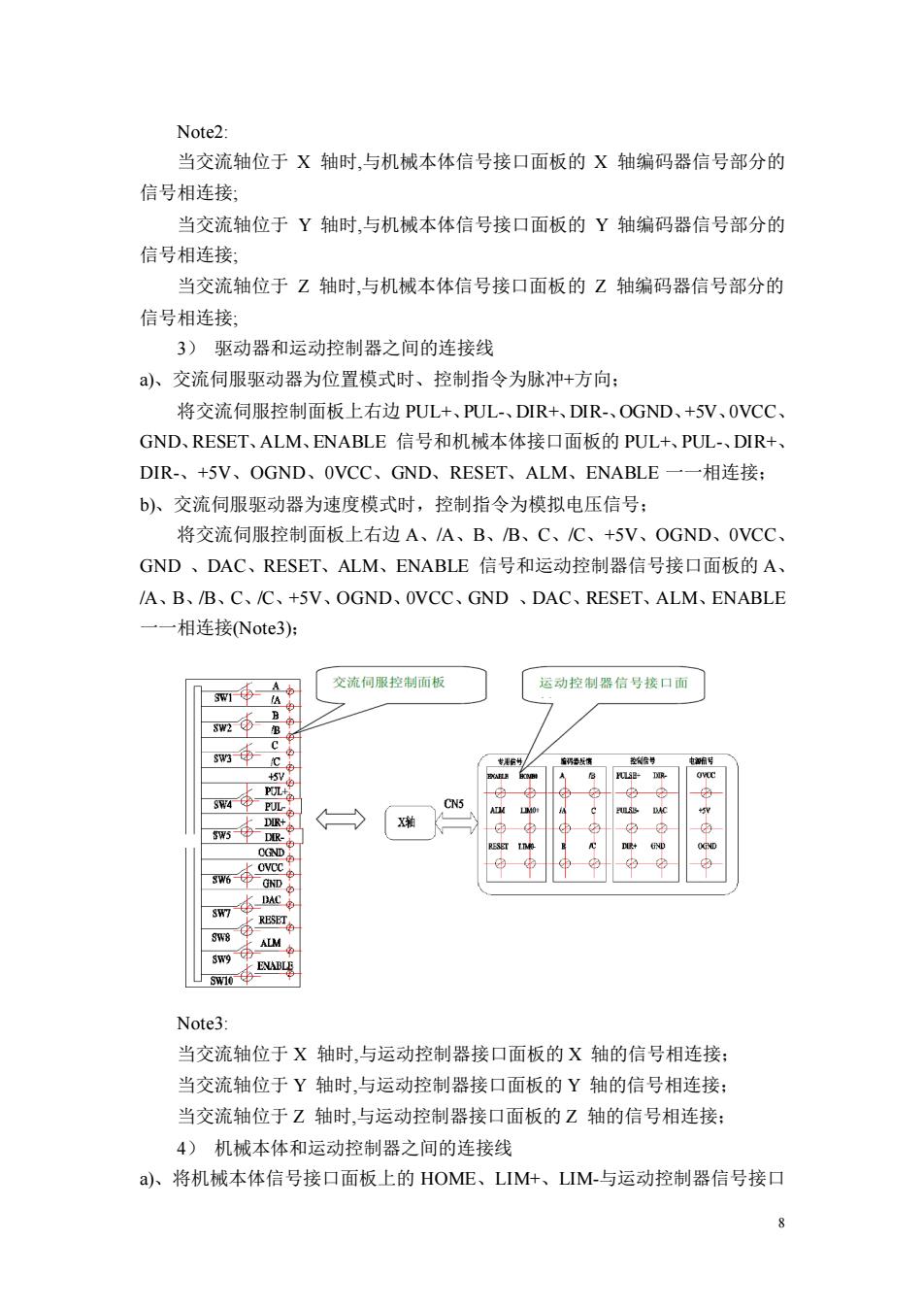
8 Note2: 当交流轴位于 X 轴时,与机械本体信号接口面板的 X 轴编码器信号部分的 信号相连接; 当交流轴位于 Y 轴时,与机械本体信号接口面板的 Y 轴编码器信号部分的 信号相连接; 当交流轴位于 Z 轴时,与机械本体信号接口面板的 Z 轴编码器信号部分的 信号相连接; 3) 驱动器和运动控制器之间的连接线 a)、交流伺服驱动器为位置模式时、控制指令为脉冲+方向; 将交流伺服控制面板上右边 PUL+、PUL-、DIR+、DIR-、OGND、+5V、0VCC、 GND、RESET、ALM、ENABLE 信号和机械本体接口面板的 PUL+、PUL-、DIR+、 DIR-、+5V、OGND、0VCC、GND、RESET、ALM、ENABLE 一一相连接; b)、交流伺服驱动器为速度模式时,控制指令为模拟电压信号; 将交流伺服控制面板上右边 A、/A、B、/B、C、/C、+5V、OGND、0VCC、 GND 、DAC、RESET、ALM、ENABLE 信号和运动控制器信号接口面板的 A、 /A、B、/B、C、/C、+5V、OGND、0VCC、GND 、DAC、RESET、ALM、ENABLE 一一相连接(Note3); Note3: 当交流轴位于 X 轴时,与运动控制器接口面板的 X 轴的信号相连接; 当交流轴位于 Y 轴时,与运动控制器接口面板的 Y 轴的信号相连接; 当交流轴位于 Z 轴时,与运动控制器接口面板的 Z 轴的信号相连接; 4) 机械本体和运动控制器之间的连接线 a)、将机械本体信号接口面板上的 HOME、LIM+、LIM-与运动控制器信号接口
面板上的HOME、LIM+、LIM相连接(Note4): HOME用来检测机械本体上的零点信号;机械回零时,需要用到该信 号: LIM+-用来检测机械本体上的正限位信号,保护轴在运动过程中,平 台不与机械端面发生碰撞,避免超出行程: LM--一用来检测机械本体上的负限位信号,保护轴在运动过程中,平台 不与机械端面发生碰撞,避免超出行程: 「机械本体信号接口面板 运动控制器信号接口面板 X滟辅助气气 HOE0】 CN5 X轴 L Note4 当交流轴位于X轴时,与运动控制器接口面板的X轴辅助信号相连接: 当交流轴位于Y轴时,与运动控制器接口面板的Y轴辅助信号相连接: 当交流轴位于Z轴时,与运动控制器接口面板的Z轴辅助信号相连接: b)、将机械本体信号接口面板上辅助编码器信号A5+、A5.、B5+、B5-、+5V GND与运动控制器信号接口面板上辅助编码器信号A5+、A5-、B5+、B5-、+5V、 GND一一对应相连接(Note5): Note5: 当交流轴位于X轴时,需要连接该部分的信号,用来进行反向间隙实验: c)、将机械本体信号接口面板上的OVCC、OGND与运动控制器信号接口面板 上的OVCC、OGND相连接:OGND为电源地,该信号不接,则会造成I/O信 号没有电源地,造成I0信号不对: 机械本体信号接口 运动控制器信号接口面板 笔架测速发电机 EXO1 OVOC +ZV OGND AIN AGND
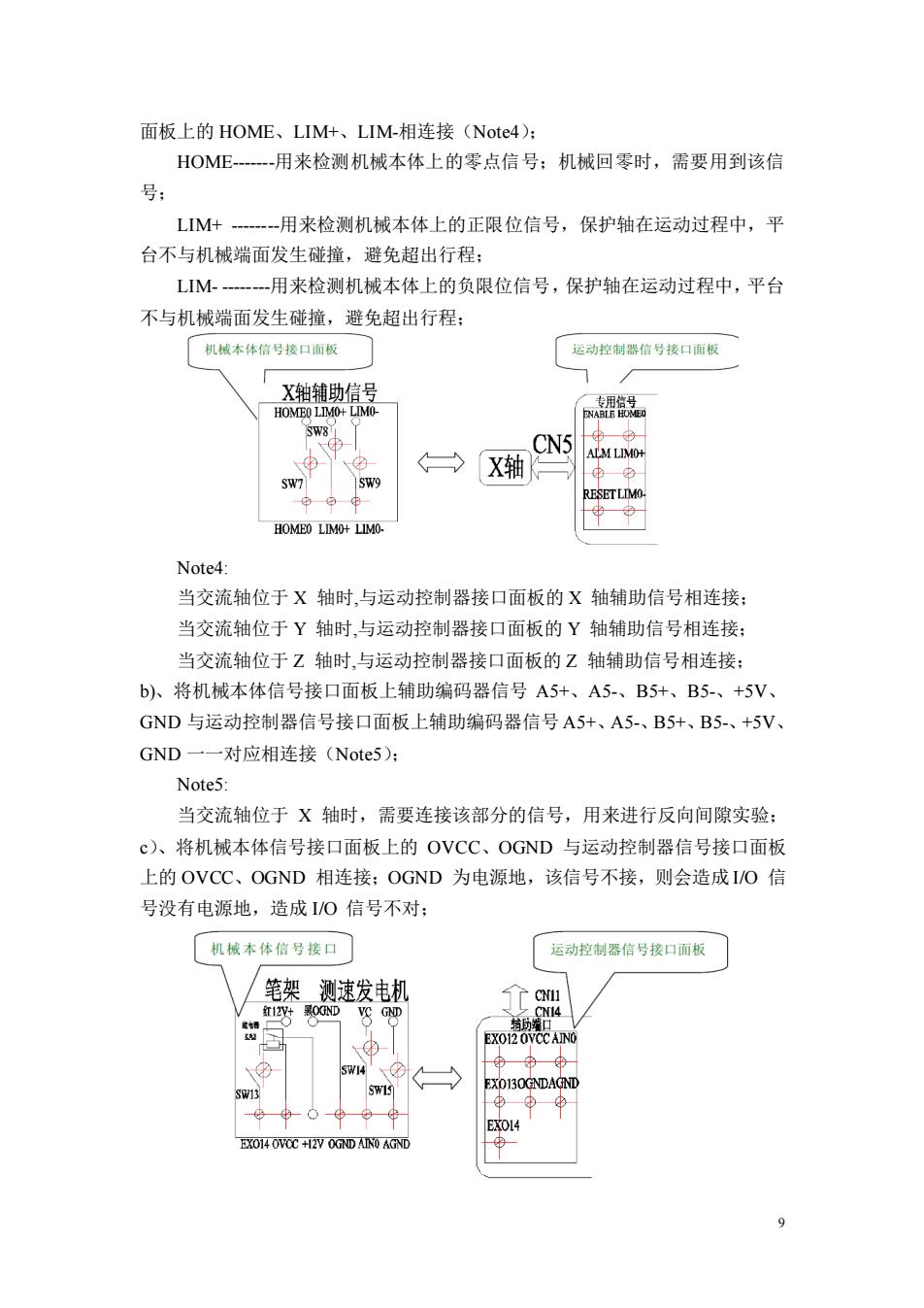
9 面板上的 HOME、LIM+、LIM-相连接(Note4); HOME-------用来检测机械本体上的零点信号;机械回零时,需要用到该信 号; LIM+ --------用来检测机械本体上的正限位信号,保护轴在运动过程中,平 台不与机械端面发生碰撞,避免超出行程; LIM- --------用来检测机械本体上的负限位信号,保护轴在运动过程中,平台 不与机械端面发生碰撞,避免超出行程; Note4: 当交流轴位于 X 轴时,与运动控制器接口面板的 X 轴辅助信号相连接; 当交流轴位于 Y 轴时,与运动控制器接口面板的 Y 轴辅助信号相连接; 当交流轴位于 Z 轴时,与运动控制器接口面板的 Z 轴辅助信号相连接; b)、将机械本体信号接口面板上辅助编码器信号 A5+、A5-、B5+、B5-、+5V、 GND 与运动控制器信号接口面板上辅助编码器信号 A5+、A5-、B5+、B5-、+5V、 GND 一一对应相连接(Note5); Note5: 当交流轴位于 X 轴时,需要连接该部分的信号,用来进行反向间隙实验; c)、将机械本体信号接口面板上的 OVCC、OGND 与运动控制器信号接口面板 上的 OVCC、OGND 相连接;OGND 为电源地,该信号不接,则会造成 I/O 信 号没有电源地,造成 I/O 信号不对;