第5卷第5期 智能系统学报 Vol.5 No.5 2010年10月 CAAI Transactions on Intelligent Systems 0ct.2010 doi:10.3969/i.issn.1673-4785.2010.05.003 无人机编队飞行的分布式控制策略与控制器设计 朱杰斌,秦世引 (北京航空航天大学自动化科学与电气工程学院,北京100191) 摘要:针对一种小型无人机模型及其编队飞行的实际背景和限制条件,分析了编队飞行所必须涉及的队形保持、 约束条件以及行为协调等关键性问题,进而引入分布式编队飞行控制策略并简要介绍了其优越性.根据分布式策略 的层级概念,先后讨论了单机控制器的设计与上层的编队控制器的设计.最后分别进行了单机的FDC(flight dynamic and control)仿真和双机编队仿真.仿真结果表明,设计的控制器在执行效率和控制性能等方面具有突出的优势. 关键词:无人机;分布式控制;飞行控制;编队飞行 中图分类号:TP273.1文献标识码:A文章编号:16734785(2010)05039208 Distributed control strategy and controller design for UAV formation flight ZHU Jie-bin,QIN Shi-yin School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China) Abstract:In view of the practical background and constraints of formation flight for a class of small UAV models, some key problems involved in formation flight,such as maintaining formation,environmental constraints,and be- havior coordination were analyzed in depth in order to introduce the distributed control strategy for formation flight and discuss its advantages.According to the hierarchical concepts and organizational structure of distributed con- trols,the controller design for both single UAV and multi-UAV formations were studied,respectively.Therefore, the FDC(flight dynamics and control)simulation for single UAV and general Simulink simulation for two-UAV for- mation flights were carried out separately.The simulation results show that the proposed controllers provide some outstanding advantages in executive efficiency and control performance. Keywords:unmanned aerial vehicle;distributed control;flight control;formation flight 无人机技术经过几十年的发展已经相对成熟, 为一阶惯性环节,然后在此基础上进行长机和僚机 在军事和民用领域发挥着独特的作用.而无人机编 的编队控制器设计.当面向实际的编队控制对象时, 队飞行技术作为无人机合作化发展中的一个核心概 必须首先完成对文中所提到的自驾仪的设计.文献 念,越来越得到人们的重视山.在军事侦察中,无人 [3]中利用了FDC(flight dynamic and control)工具 机编队飞行可以扩大侦察视野,提高作战命中率和 箱进行了编队控制器的设计与非线性仿真,为最终 任务成功率,具有单机飞行无法比拟的优点。 走向双机编队的试飞提供了重要的参考.在实际应 无人机要实现编队飞行,包括基于主一僚机编 用中,主一僚机编队模式由于简便性和实用性而被 队模式的队形保持和队形变化,就必须实现对各个 广泛采用.事实上,基于这种模式已经设计出了多种 微小型飞行器的空间位置和姿态进行有效的控 形式的编队控制器,并给出了仿真验证结果4] 制1们.文献[2]提出了基于飞机的飞行自驾仪的编 但是,在上述这些方法和试验中,大部分只是单 队飞行控制器设计,其中假定了飞机的自驾仪方程 独讨论编队控制器,并没有将编队控制器的设计与 编队控制的约束与控制策略,单机自主控制器设计 收稿日期:2010-0726. 过程结合起来,缺乏一定的系统性、实用性.本文从 基金项目:国防基础研究基金资助项目(D212006001);国家自然科 学基金重点资助项目(60736025);国家自然科学基金资助 无人机编队飞行的特点入手,讨论了编队飞行的编 项目(60875072). 队方式和约束条件,并从分布式控制策略出发,研究 通信作者:朱杰斌.E-mail:bbuaa(@126.com, 了处于底层的单机控制器和处于上层的编队控制器
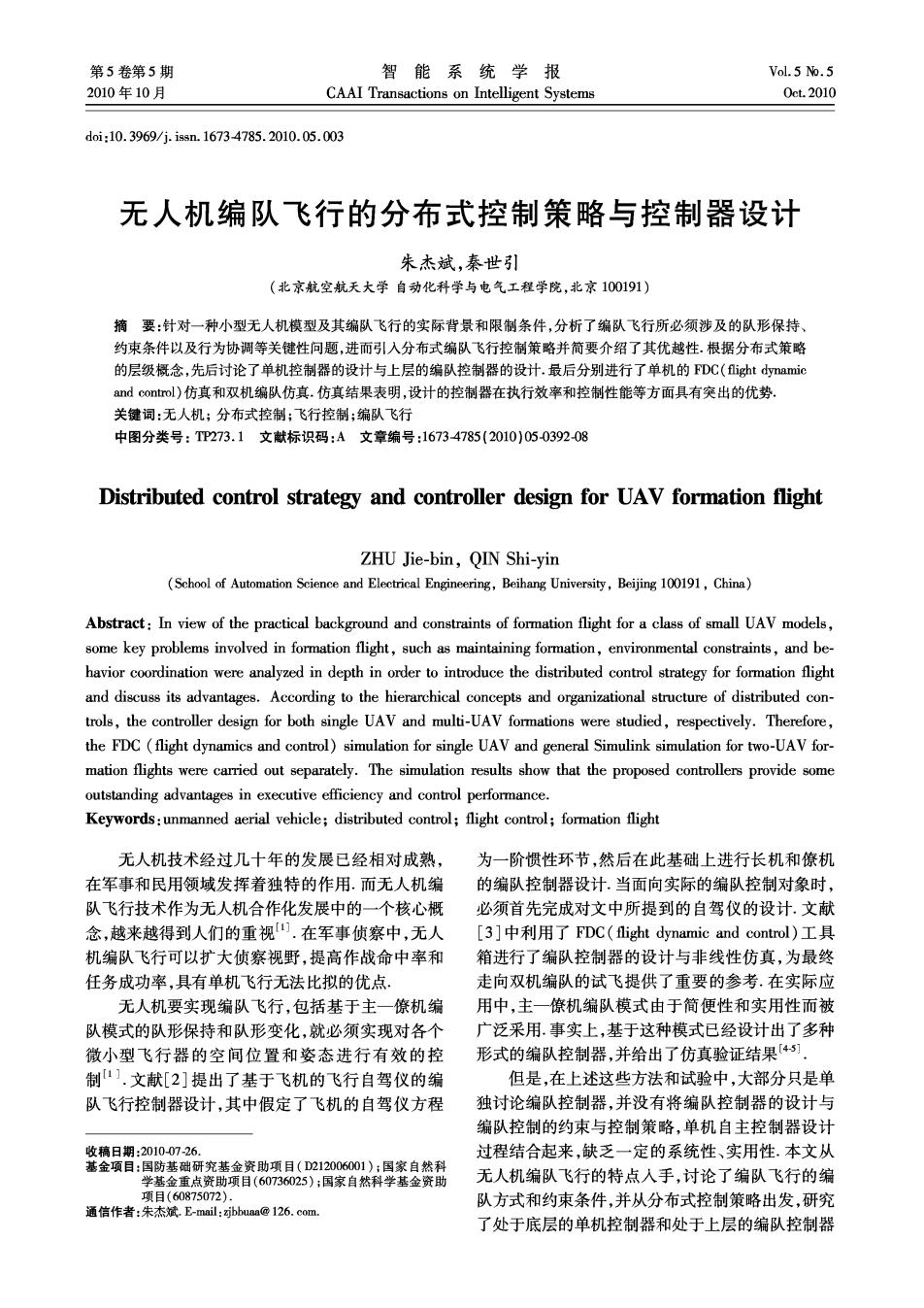
第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计 ·393· 的设计、以及二者之间的接口关系.仿真试验结果验 航迹规划模块,由航迹规划模块给出新的航迹并控 证了本文所设计的控制器的可行性与有效性。 制长机跟踪当前航迹,由于僚机始终保持与长机的 编队跟踪,因此僚机自然地跟随长机沿着变更后的 1 问题的提法 航迹飞行 1.1编队方式与约束条件 无人机编队飞行,就是将多架无人机按照一定 2分布式控制策略及其优越性 的队形进行排列,并使其在整个飞行过程中保持队 要实现多架无人机的协同编队需要在传统的两 形不变.按照不同的队形,主要有雁形编队、平行编 机编队的基础上,采取分布式控制策略:按照层级的 队、纵列编队、蛇形编队、球形编队等.不同的编队队 概念把大规模的无人机编队分割成若干个两机编 形有不同的优缺点,如雁形编队僚机可以有效利用 队,每个单元编队之间又是紧密联系的,最终实现多 长机的气流影响,减少阻力,提高巡航时间.而按照 机的编队).其编队组态关系如图1所示 不同的控制策略,编队方式又分为集中式、分布式、 分散式等山 无人机编队的任务往往是大规模的机群编队, 在完成编队任务的过程中,很可能因为一些干扰因 素引起扰动.防止冲突的策略就是要避免在扰动下 可能发生的碰撞和信息交互中的阻塞.多架无人机 要保持一定的阵型,就需要更充分的信息交互: 在密集编队下由于无人机会受到长机上洗气流 信息流 的干扰,造成了僚机的阻力有较大的变化[6.按照 空气动力学估算受上洗气流影响后的僚机阻力为 DnD- 图1分布式控制编队组态关系 式中:Dx为僚机受到的阻力,D'为长机的阻力,L'为 Fig.1 Formation configuration of distributed controls 长机的升力,W为上洗气流的速度,V为编队飞行的 前向速度.可见,相对长机而言,僚机所受阻力减小 在图1中,V,为长机,V2和V4跟随V,飞行并 了,这将会迫使其偏离原定的飞行航迹.因此,编队 保持与V,的相对位置不变,从而实现其与V1之间 控制器的设计必须考虑在涡流影响条件下的紧密编 的稳定编队;V,则可在V2的引领下根据要求的相 队模型。 对位置飞行,同理,V,也在V4的引领下根据要求的 1.2队形保持与行为协调 编队位置飞行,从而使整体编队保持稳定.整个队列 无人机编队在执行任务的过程中,由长机的感 可由若于个基本的两机跟随飞行编队组成,具有良 知传感器实时监控战场环境与态势,并将感知信息 好的扩充性。 传给智能决策模块,由智能决策模块根据感知信息 在分布式控制策略中,每一架无人机需知道与 进行分析、整理与推理,确定是否需要进行队形的变 之相邻无人机的信息,虽然控制效果相对较差,但信 更,若需要改变队形,则将处理后的感知信息传给队 息交互较少,大大减少了计算量,系统实现效率高 形控制模块,由队形控制模块根据当前环境和态势 如果用集中式控制策略完成编队,信息交互将是海 产生新的编队队形信息,通过长机的通信系统传给 量的,这是因为处理这些信息的复杂程度与编队无 2架僚机的通讯系统,再由僚机的编队控制模块根 人机的数量成几何关系.而如果采用分散式控制策 据新的编队信息形成新的队形. 略只要保持自己与约定点的相对关系,不和其他无 另一方面,由于战场环境和态势的动态变化,长 人机发生交互,因此其控制效果最差们 机可以根据当前形势变更自身的预定航迹.首先由 3飞行动态模型和扰动分析 长机的感知模块检测到当前环境中的动态事件或突 发威胁,将感知信息传递给智能决策模块,通过智能 本文中采用的小型实验无人机对象的实物如图 决策模块的分析与推理,确定是否需要进行航迹的 2所示.与其相关的各动态变量和物理参量的符号 变更,若需要变更航迹,则将处理后的感知信息传给 表示由表1给出
394 智能系统学报 第5卷 dΨ1 dt cos 0 (rcos中-qsinφ), de dt =rsin中+qcos中, dφ de=p-tan (rcos -gsin ) 图2小型无人机实物照 Fig.2 Profile of the small UAV 在小扰动的假设条件下,一般情况就能将飞行 表1符号说明 器的运动方程进行线性化.但是为了便于将线性扰 Table 1 Instruction of signs 动方程组分离为彼此独立的2组,即纵向和横侧小 参数名称 符号 参数名称 符号 扰动方程,以减少方程组阶次而解析求解,还需作下 无人机速度 滚转角速度 列假设: 无人机质量 俯仰角速度 1)飞行器具有对称平面(气动外形和质量分布 发动机推力 T 偏航角速度 均匀对称),且略去机体内部的转动部件的陀螺力 飞行阻力 D 滚转力矩 M. 飞行升力 俯仰力矩 M 矩效应, 侧力 偏航力矩 M, 2)在基准运动中,对称平面处于铅垂位置,并 迎角 X轴转动惯量 且运动所在平面与飞行器对称平面相重合] 侧滑角 Y轴转动惯量 利用水平无侧滑飞行条件中=B=0和p=r三 俯仰角 Z轴转动惯量 0,将飞机运动方程解耦为不依赖于横侧向状态量 偏航角 X轴距离 Xa (B,中,P,「,)的纵向运动方程: 滚转角 Y轴距离 Ya 航迹角 Z轴距离 Za mV Tcos a -D -mgsinx, 航迹偏转角 翼展 6 m攻=Tsin a+L-mgcosX, 速度滚转角 中 机翼面积 5 d=9-X, 升降舵 6。 动压 I.g =M. 副翼舵 6。 平均气动弦长 式中:T、D、L及M,分别为发动机推力、气流阻力 发动机安装角 φr 升力及绕俯仰轴力矩,这些参量需要根据飞机当前 根据经典飞行控制理论,可建立小型无人机的 的飞行状态来确定,在此以飞机某一平衡状态为基 12阶微分方程模型,其中包括动力学模型和运动学 准,在小扰动情况下,假设这些力和力矩为相应量的 模型 线性关系 m dv di =Tcos(a+)cos B-D-mgsin 0, 若将无人机的定常直线无侧滑飞行作为基准运 动,在小扰动假设下就可得到无人机的纵向近似模 mV=T[cos(a+r)sin Bsin s+ dt 型为 in(a+中r)cos中.]+Lcos中s-Z8in中s-mgcosx, mP=(,+24m+8识.)osa-(D,+ a8. -mVcosx de u=T-cos(a+sin Bcos P4如+04a+0 aD d dx 06 8.)-mgsin x, sin(a+pr)sin中,]+L8in中.+Zcos中., dz=Vcos xcosV. ml攻=Tsin&+(L+ap+△a+ dv 0 dya =Vsinx, Aa+Ag+ d )-mgcosx, a6.9 dt dza &=9-X, di :=-Vcos xsinΨ, 1d=M △a+ dx L出=M,-4-49n aM,aM △q+ 0g 6 a6. =M,-(L-1)p·9, 同理亦可通过小扰动理论得到横侧向的近似模型: 10=M-马-4p7 m归=(2.+04e+4p++
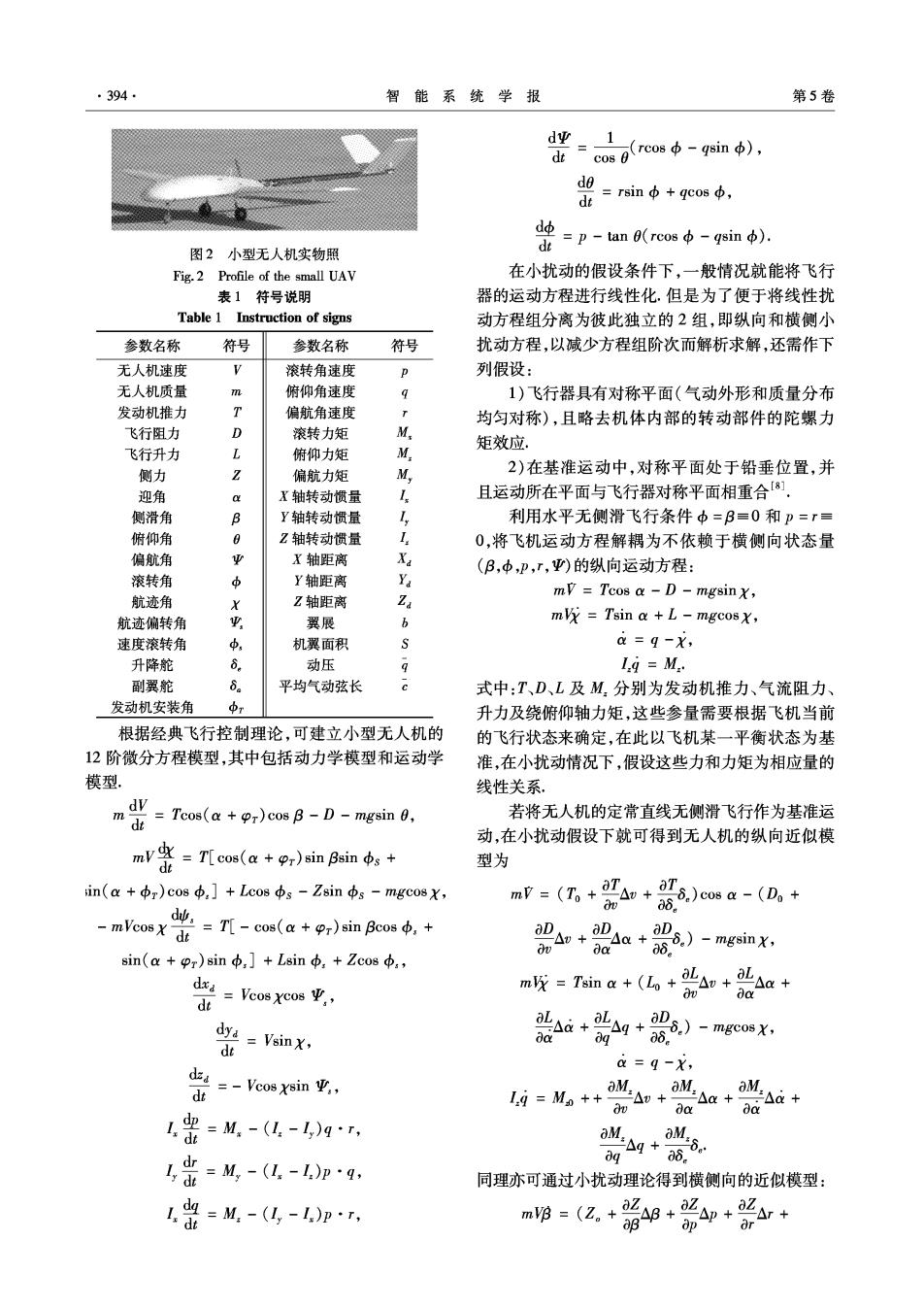
第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计 ·395· +048)-mV(-psin a rcos a) 0 274.95021 as. 0.4336 -1.6634 中=p-(rcos中-qsin中)tanf, -34.8650 0 中=rcos中-9sin中 0 0 c080 0 0 Ip Mo+ OM OM. △p+ aB △B+ dp aM.Ar* d Clon =I5,Dion =0sx2. 1)俯仰保持控制器设计。 aM.。,aM 6, +a6 该控制器内环是俯仰角速率反馈回路.该回路 aM 通过增加短周期模态的阻尼来增加其纵向的稳定 aM L,r M,o+- △B+ △p+ a8 dp aMzAr* or 性.其反馈系数可以通过根轨迹法来确定,外环是俯 aM。,aMs 仰角反馈回路,在该回路的前向通道,仅仅是比例式 86 Ta6。 控制器往往是有稳态误差的,需要在前向通道加入 将无人机的固有参数和通过吹风试验得到的飞 积分式控制器.本文使用Tyreus-Luyben方法设计该 行参数,以及通过系统辨识方法得到的发动机参数 回路中的PI控制器].其俯仰保持的控制律表示 代入到其中可以得到纵向与横向的状态方程. 形式为 4 控制器设计 6。=Kg(0。-6)+K(0。-8)d-k,9.(1) 式中:K为前向通道的比例系数,K为前向通道的 实现纵向与横航向的解耦建模之后,单机控制 积分系数,k。为俯仰角反馈系数,日。为期望俯仰角 器的设计亦可分为纵向控制器和横侧向控制器分别 (控制律的表达式中系数的书写规则:K为前向通道 进行.必须注意到,本文所设计的单机控制器是服务 系数,下标p表示比例系数,下标I表示积分系数; 于其上层的导航与编队系统,从而使得编队飞行过 上标则表示对应于相应的回路,如式(1)中上标0 程能够按照导航系统或编队控制器所要求飞行参量 表示俯仰角回路;k为反馈系数,下标表示对应的反 (速度、高度及偏航信号等)实现稳定、快速、准确的 控制效果1 馈回路). 2)高度保持控制器的设计. 4.1单机纵向控制器的设计 高度保持控制器的是在俯仰保持控制器的外 根据编队试飞的要求,纵向自驾仪的设计主要 环.通过高度保持控制器的控制,UAV可以爬升到 包括高度控制器(控制高度)和速度控制系统.首先 飞行包线范围内任意高度.在编队控制系统中,该控 确定飞机的平飞状态,并代入到上面介绍的小扰动 制器直接接受导航系统或者是僚机编队控制系统的 方程中,整理得到纵向的状态方程: 信号.引入俯仰角偏离信号,飞机在未达到给定高度 X=AloX Bionu, 时,就提前收回舵面,减少飞机的上升率,对高度稳 Y ClopX Diou. 定系统起到阻尼作用,为进一步增加阻尼,同时还引 式中:X=[Vaq0H],V为前向速度,a为迎角,q 入了高度微分信号△H. 为俯仰角速度,0为俯仰角,H为高度,4=[6.6,]T 19g 8。、δ,分别为升降舵与油门舵机输入. △8PIP控 △H 舵 A 在本文中,将平飞速度与高度确定后,其对应的 制器 制器路 状态矩阵和控制矩阵分别为 Alon= 速*陀嫘 日g r-0.06415.2579 0 -9.8000-0.0000 垂直陀 -0.0309 -5.04971.0000 0 -0.0012 -0.0287-26.2897-4.1758 -0.0000 高度差传感器 0 0 1.0000 0 0 图3高度保持控制器组织结构 0 -15 0 15 0 Fig.3 Organization structure of height controller

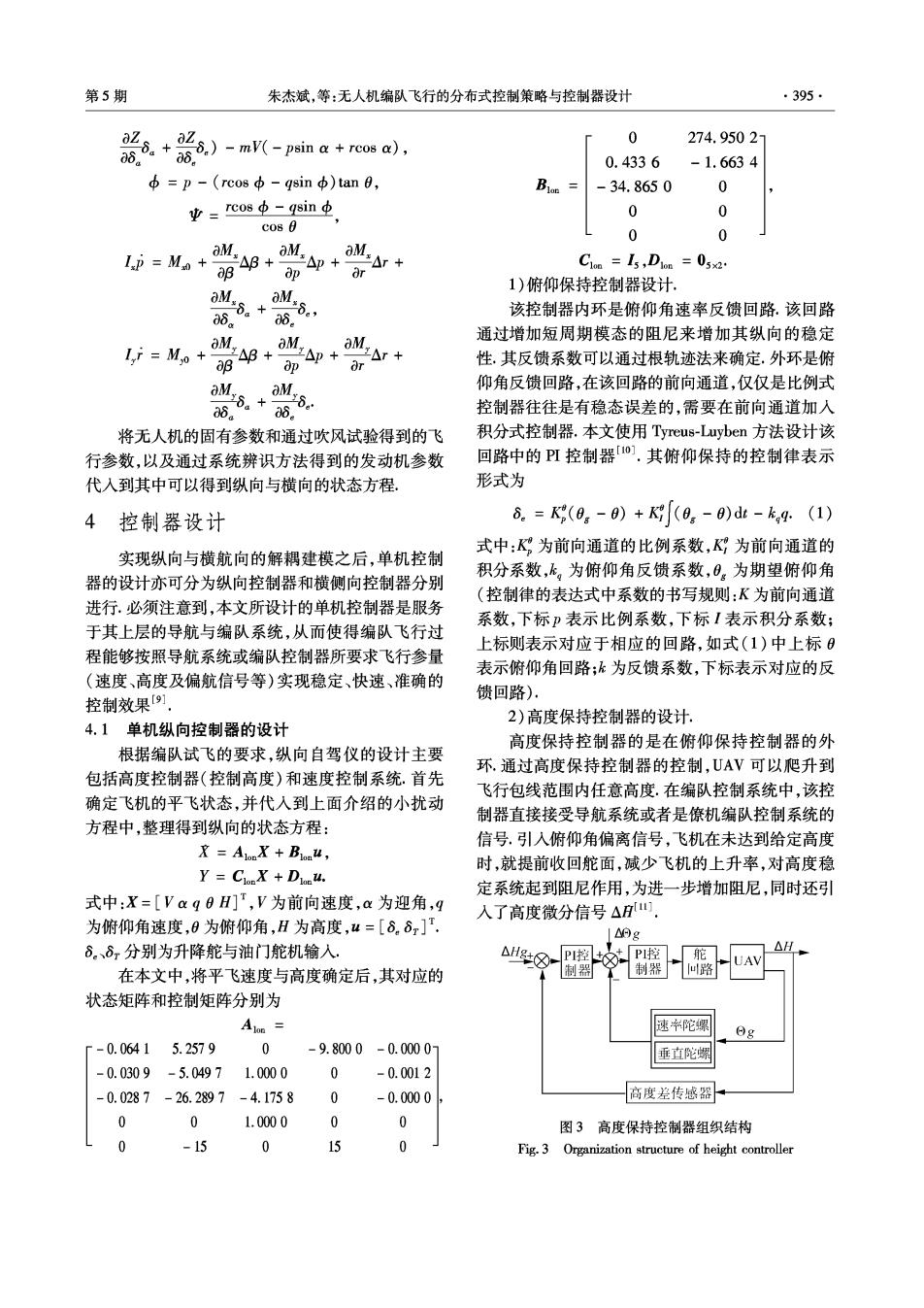
.396. 智能系统学报 第5卷 高度保持控制系统的控制律表达形式为 在飞机的协调转弯中,横航向的偏航角速度与滚转 6。=K(0。-0)+K(0。-0)dt-k,9, 角速度的关系是业号种,横侧向控制器的基本框 0.=K"AH K"AHdt. 架如图5所示. 式中:△H=H。-H-kA为高度偏差信号. K 3)速度保持控制器的设计, 高度白驾仪 通过控制油门的大小来达到改变发动机推力从 △ △H 而达到控制的目的.其基本方案如图4所示.从图中 可以看到,UAV到自动控制驾驶仪为虚线连接,这 表示自动驾驶仪从UAV感受的量是随着目标的不 同而变化的,当需要飞机进行俯仰保持时,则感受的 1+k。 是俯仰角和俯仰角速率,若需要UAV保持高度飞行 1+k3 时则自驾仪感受的是飞机的高度和高度变化率. 图5横侧向自驾仪组织结构 自动驾驶仪 Fig.5 Organization structure of lateral autopilot 4.3编队接口关系 在考虑到分布式控制系统中的层级概念,前面 油门白 发动机 所述的单机控制系统处于整个编队系统中的最底 动控制 层.因此底层的控制与上层系统之间数据的交互显 得非常重要。 考虑双机编队过程中的运动学模型,在图6的 图4速度控制器的组织结构 参考坐标系中标出了长机和僚机的瞬时位置和速度 Fig.4 Organization structure of velocity controller 向量 速度误差信号包括2部分,一部分是期望速度 与实际速度输出的差值,另一部分是速度微分信号. 其控制律的表达形式为 6=K (AV+K:V)+K (AV+K:V)dt. 式中:AV=V-V leader 4.2单机横航向控制器的设计 在横向与航向控制器的设计中,采用与纵向控 wingman 制器类似的结构.内环是滚转保持控制器,外环为横 航向保持的控制器.因此其基本设计思路与高度控 制器类似. 图6僚机的参考坐标系 1)滚转保持控制器. Fig.6 The reference coordinate system of wingman 该回路通过控制副翼偏转,产生升力差,从而产 在参考坐标系中,设长机的位置为(x,y,z),运 生滚转力矩,其控制律表达形式为 动学方程为 d正=cos业.-中y-V. d 6。=Kg△中+K△dt. 式中:△中=中g-中-k,P dy =Vsin业.-中x, 2)偏航保持控制器 该回路通过飞机滚转产生侧力,使飞机发生偏 2 hw -hu. 航.其控制律表达形式为 式中:航向角误差为平。=乎-平 由上式可知,僚机与长机的相对距离(x,y,z), 6.=K停△b+K[△bdt+Kg△重+K△. 僚机编队控制器必须与底层的控制器交互平、h、V 式中:△亚=亚。-亚-k中 这3个接口的数据.这3个接口对应于上述所设计 为保证飞机能够无侧滑且不掉高地协调转弯, 的单机自主控制器的输入端。 还必须加入消除侧滑的控制器和高度保持控制器。 在设计僚机对长机的跟踪控制时,主要是利用x