第5卷第4期 智能系统学报 Vol.5 No.4 2010年8月 CAAI Transactions on Intelligent Systems Aug.2010 doi:10.3969/i.issn.1673-4785.2010.04.011 柔性倒立摆的模糊控制算法 赵潇菲,张井岗 (太原科技大学电子信息工程学院,山西太原030024) 摘要:针对直线柔性一级倒立摆多变量的特性,提出了基于融合函数的模糊控制算法,解决了“规则爆炸”问题.利 用最优控制理论计算出使系统稳定的反馈增益矩阵,由反馈增益矩阵构造融合函数,由此减少了模糊控制器的输入 变量维数.仿真和实际实验结果证明该方案的有效性和正确性: 关键词:直线柔性一级倒立摆;模糊控制器;融合函数;模糊规则 中图分类号:1P273文献标识码:A文章编号:1673-4785(2010)040347-06 A fuzzy control method for flexible-joint inverted pendulums ZHAO Xiao-fei,ZHANG Jing-gang (School of electronics information engineering of Taiyuan University of Science and Technology,Taiyuan 030024,China Abstract:modeling of a linear single-stage flexible-joint inverted pendulum involves multiple interacting variables A novel fuzzy control method was proposed that would solve the rule explosion problem by applying a fusion func- tion.The feedback gain matrix,which makes the system stable,was calculated using optimal control theory.Then the fusion function was constructed with a feedback gain matrix which reduced the dimensions of variables passed to the fuzzy controller.Simulations and practical experiments were conducted.The results showed the validity and cor- rectness of the method. Keywords:Linear 1-stage flexible-joint inverted pendulum;fuzzy controller;fusion function;fuzzy rule 倒立摆是一个非线性、强耦合、不稳定的控制对 难.本文以直线柔性一级倒立摆为控制对象研究了基 象,通常被作为典型的实验控制对象来验证各种控制 于融合函数的模糊控制算法2],成功的解决了“规则爆 方法,受到世界各国许多科学家的青睐.模糊控制属于 炸”问题 智能控制范畴,它是一种非线性控制.在过程控制领域 1 发挥着重要的作用.然而模糊控制在实际应用中也存 系统建模 在一定的局限性,“规则爆炸”就是其中的一个难题为 柔性倒立摆控制平台是由普通P℃机、柔性倒 解决这个问题张乃尧等针对一级倒立摆提出过双闭 立摆本体、电控箱以及运动控制卡等部分组成的,系 环模糊控制方案,内环控制摆杆角度,外环控制小车位 统框图如图1所示。 移;范醒哲2]等人将此方法推广到三级倒立摆系统中, 伺吸 计算机运动控制一驭动器→同服电机→倒立摆 并提出2种模糊串级控制方案.而本文所研究的直线 柔性一级倒立摆系统是一种新型的更加复杂且难以控 制的非线性多变量不稳定系统,它是在直线倒立摆的 光电码盘 基础上引入了自由震荡环节:自由弹簧系统,控制涉及 光电码盘2 到的状态变量共有6个,如果每个变量的论域作5个 模糊集的模糊划分,这样完备的推理规则库会包含个 光电码盘3 5=15625推理规则,要建立一个完善的控制规则很 图1直线一级柔性连接倒立摆系统 Fig.1 Linear 1-stage flexible-joint inverted pendulum system 收稿日期:2009-1102. 在忽略各种磨擦、空气阻力后,可将柔性一级倒 通信作者:赵潇菲.E-mail:fein0817@163.com. 立摆系统抽象成由弹簧、匀质摆杆、小车和质量块组

348. 智能系统学报 第5卷 成的系统,如图2所示.M1、M2分别为主动小车和 从动小车的质量,m为摆杆质量,1为摆杆转动中心 T=Tw+7%+T.=M号+2M号+ 到杆质心的长度,k为弹簧的倔强系数,x1、x2分别 n-mli.0co0+ 3m.. (2) 为主动小车和从动小车的位移,0为摆杆的角度 系统总势能为 M.21 VV+V(+mgleos 0.(3) 由于广义坐标x1、x2有外力作用,0无外力作用,因 此有等式 图2柔性连接倒立摆系统模型 M11+k(x1-x2)=u-C11, Fig.2 Flexible joint inverted-pendulum system model (m+M2)x2-m.kcos0·0+mlsin0·0+ 拉格朗日方程为 k(x2-x1)=-C22, L(q,4)=T(q,9)-V(q,9). (1) -3mcos 0x +4mly -3mgsin 0 0. 系统总动能为 对方程组进行整理可得到如下等式: 或=f(,成,w)=二(西-)-+u M 名=f(1,k,2,日,0)=-3gmc0s9sin0+4h(-)-4e2-4 msin0. m +4M2 +3msin'0 0=f(1,✉,4,00)=3g(m+M)sim0+3k(s-)cos0-3cc0s0,-31mc0s0sin00 I(m +3msin'0 +4M2) 系统方程为 「7 -05 2 2 0 9) 0 0 0 + u (4) f(x1,1,x2) 1 2 f2(x1,x2,x2,0,0) 0 La J f5(x1,2,x2,0,0) Lo- 在平衡点X10=(x1,1,x2,名,0,0)=(0,0,0,0,0,0)处对系统进行线性化: k 1 M-M++, =n格nna+na0, 、4k 4c2 2 3k 3k 3c2 ,3g(m+M2) 0=1m+4M,7m+4M,5m+4M,+7m+4M, 可得系统的状态空间方程如下: 0 1 0 0 0 0> k C1 07 M 一M 0 0 M 0厂1 0 0 0 1 0 0 M 4h 0 (5) 0 4k 4c2 3gm m+4M2 m+4M2 m+4M2 m+4M2 0 0 0 0 0 0 0 1 0 0 3k 0 3k 32 3g(M2+m) 03 L(m+4M2) -1(m+4M2) -1(m+4M2) 0 1(m+4M2)
第4期 赵潇非,等:柔性倒立摆的模糊控制算法研究 ·349· 取问题信息的过程,将高维输入转化为低维输出.算 法F2(·)称为模糊作用函数,它根据前级算法的输 Γ100000- 出对系统进行模糊控制.这种模糊控制器原理图如 Y= 001000 (6) 图3所示: -0 00010 直线级 9 x元x2永200] 柔性倒立摆 表1柔性倒立摆参数 Table 1 Flexible joint inverted-pendulums parameter 榄糊 KE 参数 数值 控制器,K,EC 啊数 主动小车质量M 1.1kg 从动小车质量M2 1.1Kg 图3模糊控制器原理图 摆杆质量m 0.13kg Fig.3 Fuzzy controller schematic 构造融合函数步骤: 弹簧倔强系数k 2500N/m 1)利用最优控制理论设计出一组可让柔性倒 主动小车与导轨之间的摩擦系数© 0.2N·a/m 立摆系统的线性模型基本稳定的反馈增益矩阵 从动小车与导轨之间的摩擦系数c2 0.2N·a/m K=[K Ki Kn Ki Ko K]. 摆杆转动中心到杆质心的长度1 0.25m 以下利用线性二次最优控制理论(LQR)来为柔 将各参数代人可得: 性一级倒立摆的状态方程设计一个状态反馈矩阵 A= 最优控制性能指标函数: 0 1 0 0 0 01 J=[X()Qx()+()RU()].(7) -22727-0.1822727 0 0 0 最优控制规律由 0 0 1 0 0 U(t)=-KX(t)=-R-BPX(t) (8) 22075 0 -22075 -0.17660.84370 给出.其中最优控制向量K为 0 0 0 0 1 K=R-BTP. (9) 66225 0 -66225 -0.529831.9310 矩阵P满足代数黎卡提方程 0 ATP PA PBR-BP+=0. 0.9091 r1000001 Γ0 求解即可得到矩阵P. 0 B= ,C= 001 000,D= 将矩阵P代人方程(9),求得的矩阵K就是最 0 L000010 优矩阵. 0 在实际系统的控制过程中,取?为对角阵,其 0 中21=2000,22=1,23=1000,24=1,25= 2 基于融合函数的模糊控制算法[3] 100,Q6=1;R=1,通过计算可得 K= 基于融合函数的模糊控制算法的原理是将表示 [208544621.4408-2633169-57.8452140990625.77041. 直线一级柔性倒立摆系统位移和角度即:x1、2、03 2)根据反馈增益矩阵构造函数F,(X) 个状态变量加权合成一个输入变量,表示速度(角 K·X=K1+K花1+K,2+ 速度)即:1、2、03个状态变量加权合成另一个输 Ki+K0+K0 =[Ko Ko]. 入变量.由此,就可用常规的二维模糊控制器实现对 直线一级柔性倒立摆的控制,显然可大大减少控制 规则数量. 0 K 010 基于融合函数的模糊控制策略可以用如下公式 表示: K K 0 K 01 Y=F2[F(X)]. 式中:算法F:(x)称为融合函数,它利用系统状态的 式中: 相关性和输入信息的状态可合成性完成了组合、提
·350· 智能系统学报 第5卷 「K 0 K 输出控制量的比例因子可由下式确定: K 0 1 F,(X) K K.=50 .yu 0 0 K 0 量化因子的大小对控制系统动态性能影响很 由此可得: 大,K。较大时系统超调较大;K越大超调越小,但系 F,(X)= 统响应速度会变慢;输出比例因子K,的大小影响着 r1.4791 0 -1.8676 0 1 控制器的输出,是模糊控制器的总的增益,影响着模 L 0 0.8320 0 -2.244601J 糊控制系统特性.K,太小会使系统动态响应过程变 3)通过F,(X)把输入状态变量降维,得到综合 长,而太大会使系统振荡加剧.所以合理的选择量化 误差E和综合误差率EC 因子和比例因子很重要. 4仿真结果 当取初值为[0.100.100.10],.3=18,k= 3模糊控制器设计 5,k,=25时,仿真步长为5ms,仿真时间为58.仿真 通过融合函数使得倒立摆系统降维,用降维得 结果图3~8所示: 到的综合误差E和综合误差率EC作模糊控制器的 0.16 输人,所以只需设计一个二维模糊控制器即可,使设 0.12 计大大简化,具体过程如下: 0.08 1)确定隶属度函数 0.04 综合误差E和综合误差率EC的论域都取为 5 10 15 tis [-180,180],其中NB、NM、NS、PS、PM、PB是综合 误差论域[-180,180]上的模糊子集,NB、NM、Z0、 图4主动小车位移响应曲线 PM、PB是综合误差率EC论域[-180,180]上的模 Fig.4 Response of initiative cars displacement 0.16 糊子集,模糊集的隶属度函数均取“gaussmf'”隶属度 0.12 函数.输出变量U的论域取为[-50,50],NB、NM、 0.08 NS、PS、PM、PB是论域[-50,50]上的模糊子集,模 0.04 糊集的隶属度函数取“trim”隶属度函数、 2)设计模糊规则 5 10 15 tis 设计模糊控制规则的基本原则:当误差大或较 大时,选择控制量以尽快消除误差为主;当误差较小 图5从动小车位移响应曲线 Fig.5 Response of driven car's displacement 时,选择控制量要注意防止超调,以系统稳定性为主 0.15 要出发点, 0.10 3)清晰化:采用重心法来实现清晰化. 0.05 4)确定量化因子和比例因子 0 -0.05 为进行模糊化,需将输入变量从基本论域 0.106 10 15 [-x。,x。]转换到模糊集的论域X=[-180,180]. 这中间须将输入变量乘以相应的因子即:量化因子 图6摆杆角度响应曲线 (综合误差的量化因子K。和综合误差率的量化因子 Fig.6 Response of swing link's angle K),由如下2个公式确定: 0.4 K=180,K=180 0.2 七 04 在模糊控制器的控制过程中,误差和误差变化 -0.2 -0.4 率的基本论域范围比模糊论域的范围小得多,因此 0 10 15 量化因子都远大于1. tis 同样,每次采样经模糊控制算法给出的控制量也不 图7主动小车速度响应曲线 能直接控制对橡,需将转换到控制对橡的基本论域中去, Fig.7 Response of initiative car's rate
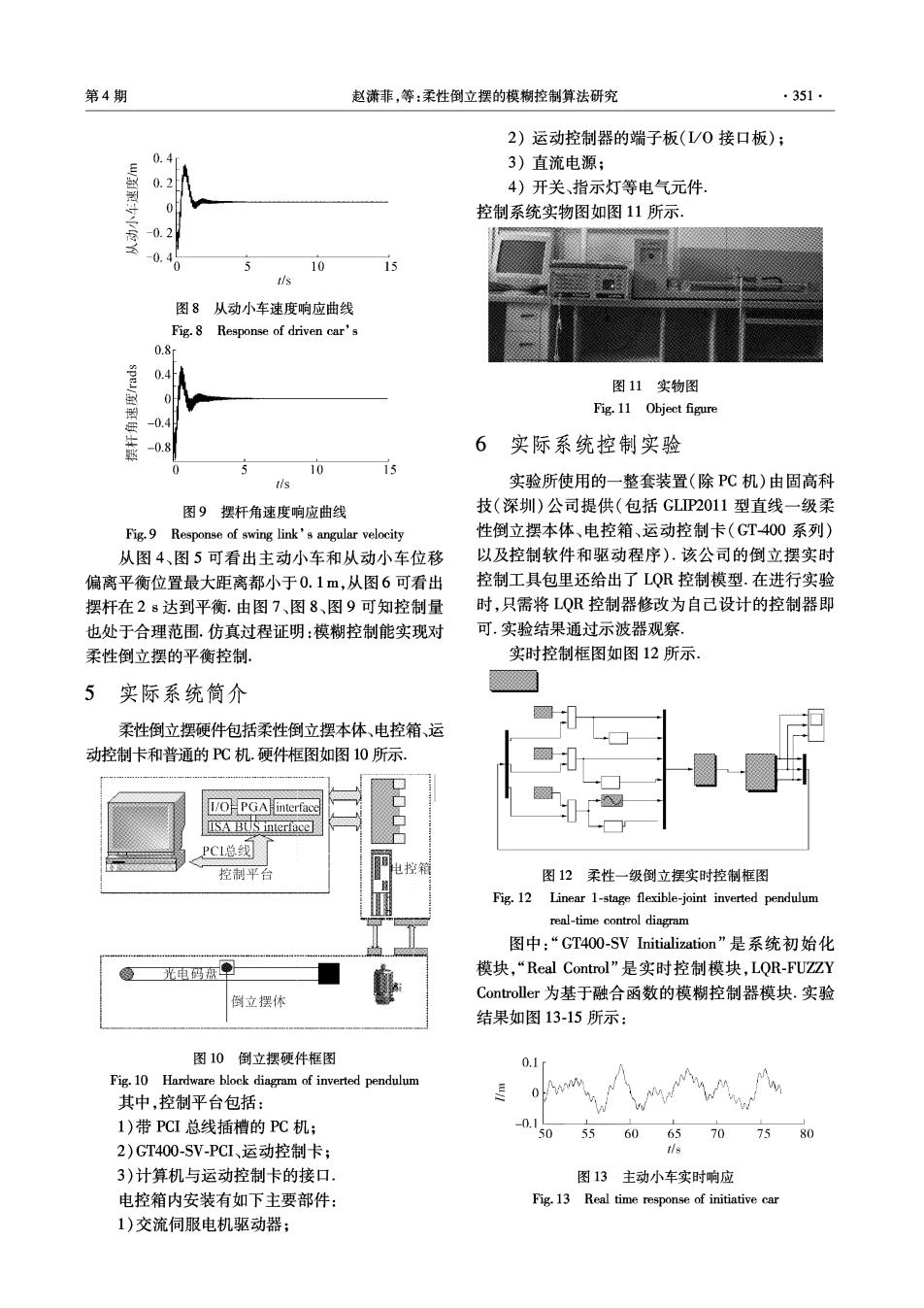
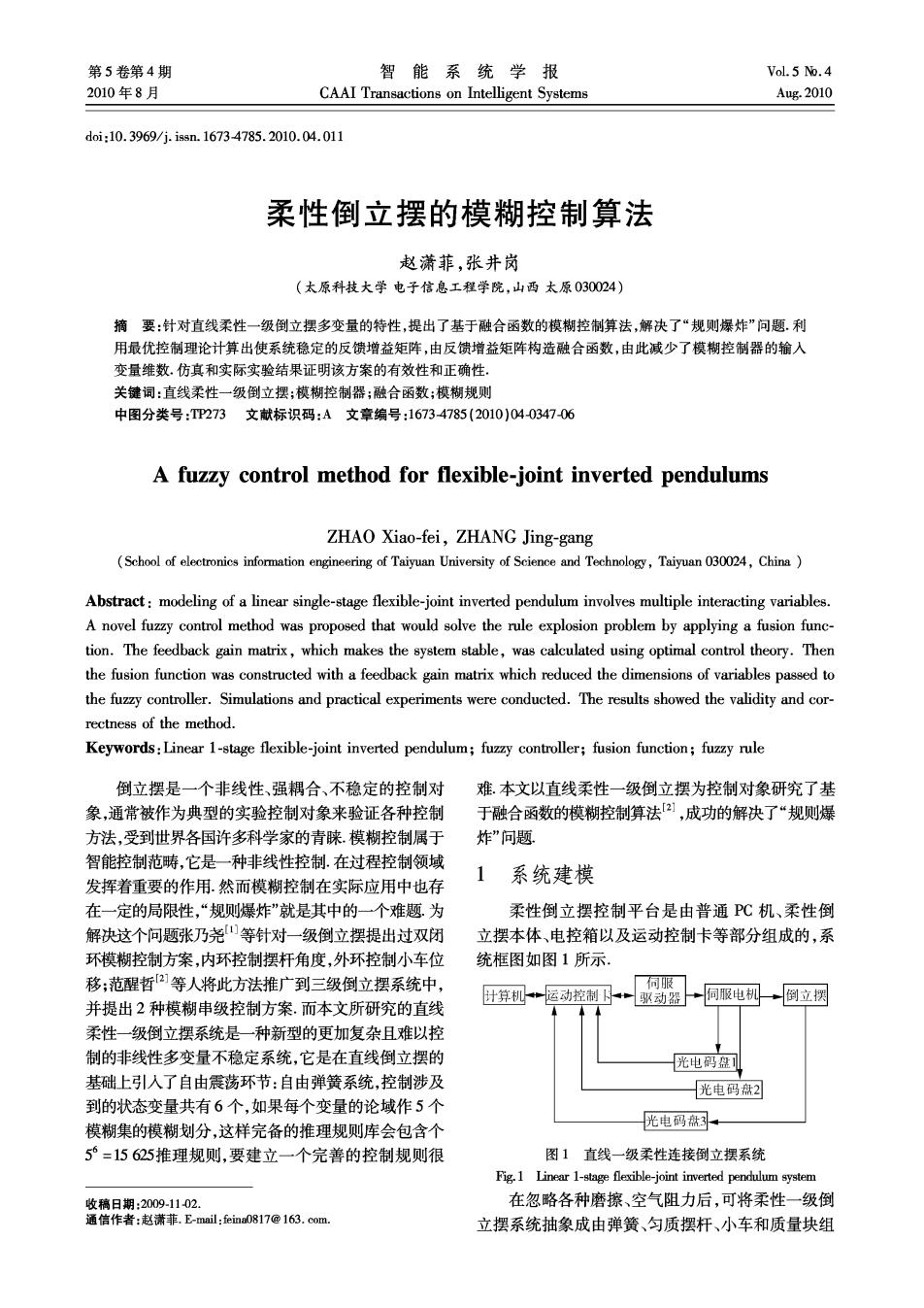
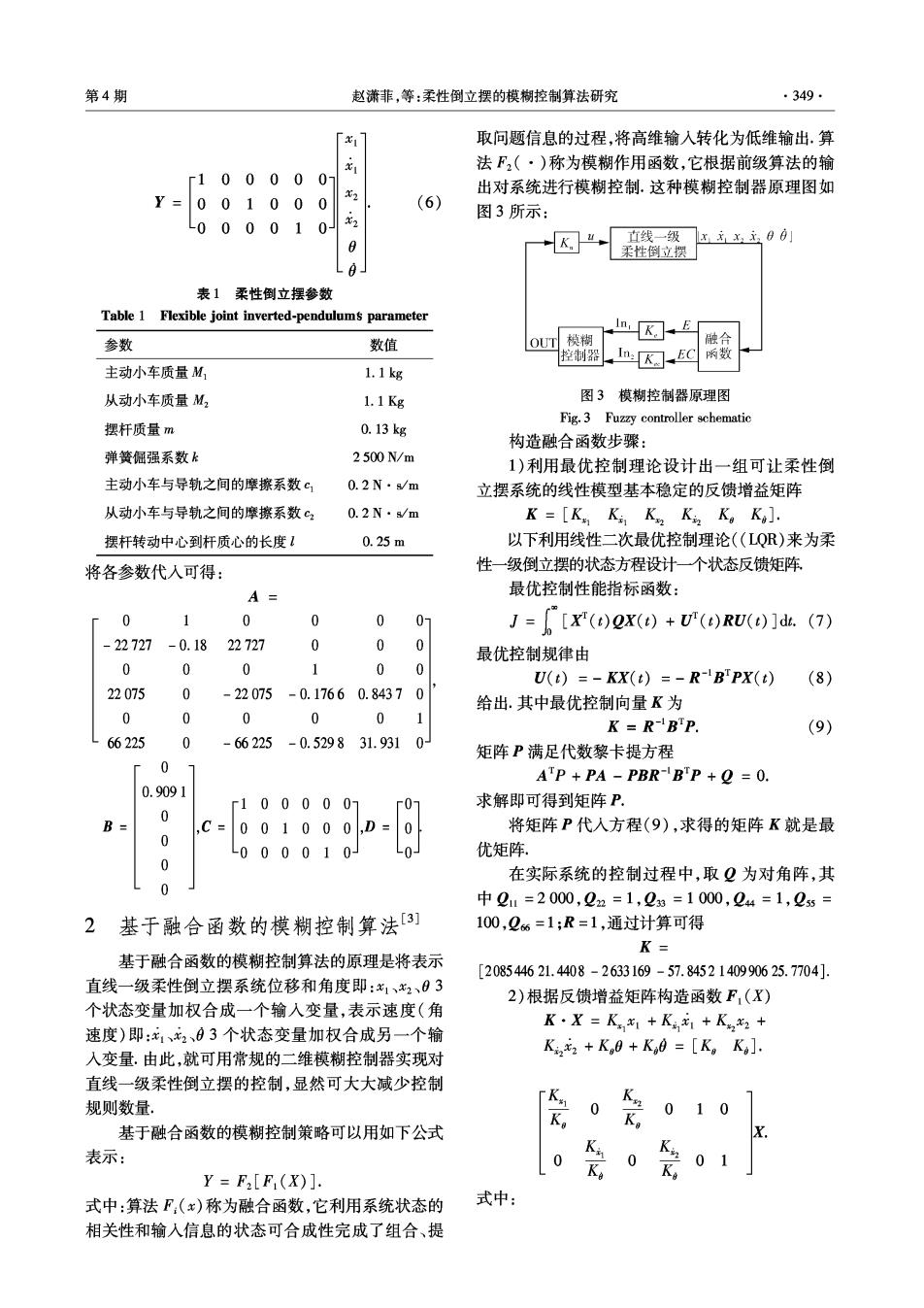
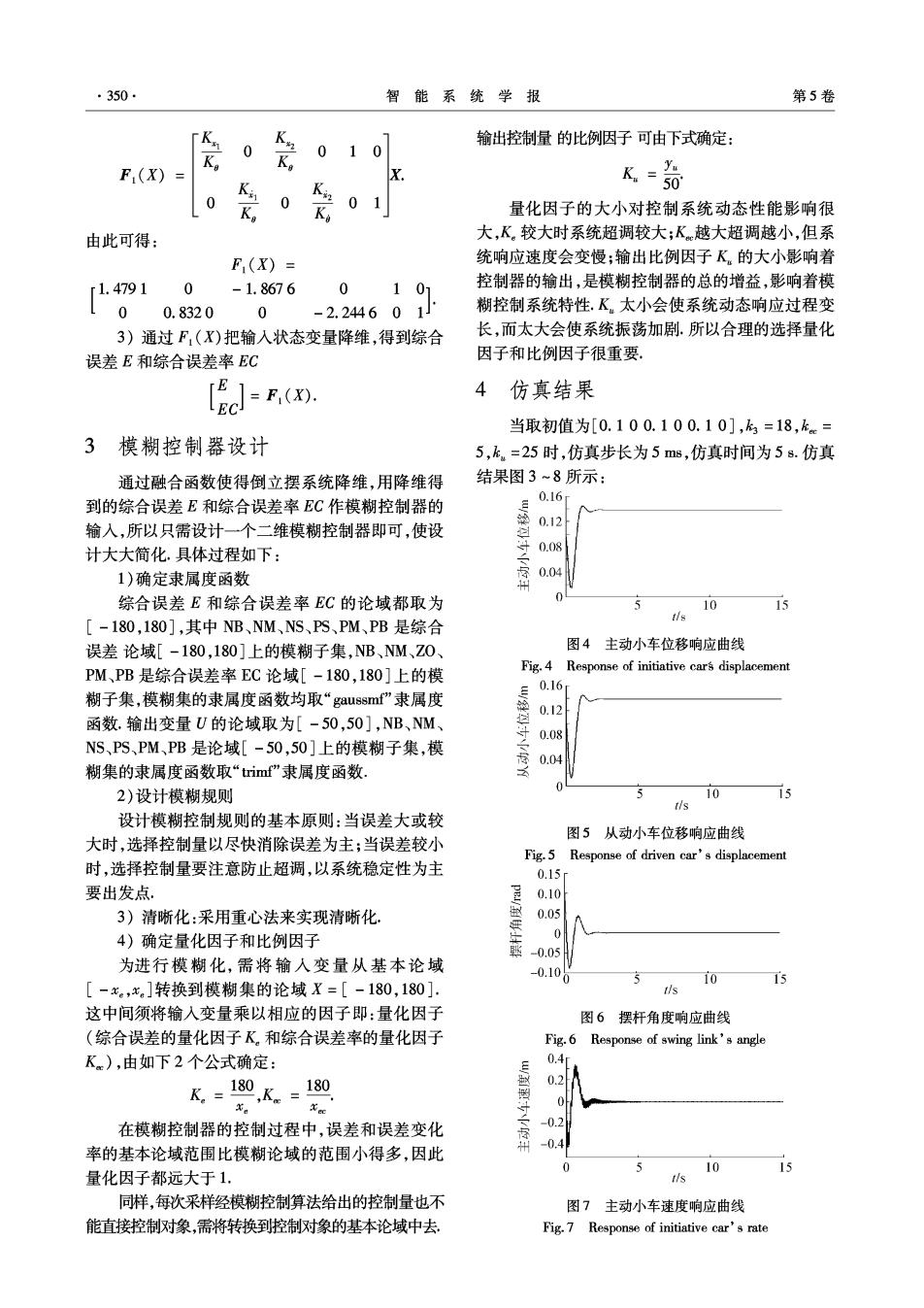
第4期 赵潇菲,等:柔性倒立摆的模糊控制算法研究 .351· 2)运动控制器的端子板(I/0接口板); 0.4 3)直流电源; 0.2 4)开关、指示灯等电气元件 控制系统实物图如图11所示. -0.2 -0.4 10 15 图8从动小车速度响应曲线 Fig.8 Response of driven car's 0.8r 0. 图11实物图 Fig.11 Object figure -0 -. 6 实际系统控制实验 10 15 tis 实验所使用的一整套装置(除P℃机)由固高科 图9摆杆角速度响应曲线 技(深圳)公司提供(包括GLP2011型直线一级柔 Fig.9 Response of swing link's angular velocity 性倒立摆本体、电控箱、运动控制卡(GT400系列) 从图4、图5可看出主动小车和从动小车位移 以及控制软件和驱动程序).该公司的倒立摆实时 偏离平衡位置最大距离都小于0.1m,从图6可看出 控制工具包里还给出了LQR控制模型.在进行实验 摆杆在2s达到平衡.由图7、图8、图9可知控制量 时,只需将LQR控制器修改为自己设计的控制器即 也处于合理范围.仿真过程证明:模糊控制能实现对 可.实验结果通过示波器观察。 柔性倒立摆的平衡控制, 实时控制框图如图12所示. 5实际系统简介 柔性倒立摆硬件包括柔性倒立摆本体、电控箱、运 动控制卡和普通的P℃机.硬件框图如图10所示, I/O月PGA月interface ISA BUS interface] PCL总线 控制平台 电控箱 图12柔性一级倒立摆实时控制框图 Fig.12 Linear 1-stage flexible-joint inverted pendulum real-time control diagram 图中:“GT400-SV Initialization”是系统初始化 】 模块,“Real Control”是实时控制模块,LQR-FUZZY 倒立摆体 Controller为基于融合函数的模糊控制器模块.实验 结果如图13-15所示: 图10倒立摆硬件框图 0.1 Fig.10 Hardware block diagram of inverted pendulum 0 其中,控制平台包括: 1)带PCI总线插槽的PC机; 0.1 50 55 60 65 70 75 80 2)GT400-SV-PCI、运动控制卡; t/s 3)计算机与运动控制卡的接口。 图13主动小车实时响应 电控箱内安装有如下主要部件: Fig.13 Real time response of initiative car 1)交流伺服电机驱动器;