第5卷第4期 智能系统学报 Vol.5 No.4 2010年8月 CAAI Transactions on Intelligent Systems Aug.2010 doi:10.3969/j.issn.16734785.2010.04.002 情感决策的智能家居虚拟人路径规划 黄晓丹,王粉花,王志良 (北京科技大学信息工程学院,北京100083) 摘要:智能家居环境中的虚拟人,目前在智能性和行为规划的研究中还存在许多不足,针对这两方面问题,首先, 提出了认知过滤层的概念,并建立了虚拟人行为模型.在此基础上,对模型中的认知行为部分进行了深入研究,并利 用现有情感模型将情感智能与虚拟人行为规划相结合.由于路径规划是一种基本且重要的行为,针对智能家居环境 中多环形障碍物的特点,对路径规划算法进行了改进.最后,通过三维仿真对上述模型和算法加以实现.仿真结果表 明,虚拟人的行为具有一定的智能性,情感的加入也使得虚拟人更加人性化 关键词:智能虚拟人;情感决策;行为表达;路径规划;智能家居 中图分类号:TP391.9文献标识码:A文章编号:16734785(2010)040292-11 Using affective decision-making for the path planning of virtual humans in a smart home HUANG Xiao-dan,WANG Fen-hua,WANG Zhi-liang Department of Electronic Information Engineering,School of Information Engineering,University of Science and Technology Beijing, Beijing 100083,China) Abstract:For virtual humans in a smart home,there are still many problems that must be solved before levels of apparent intelligence and social behavior are acceptable.To promote solutions,a cognition filtering layer was pro- posed and a behavioral model for virtual humans was established.Then,further study on cognition was performed, with current emotion models employed to study both emotional intelligence and behavioral planning of virtual hu- mans.To deal with the many circular obstacles in a smart home,improvements to path planning were proposed.Fi- nally,a 3-D simulation was used to test the proposed model and algorithm.Results showed that the behavior of vir- tual humans seemed more intelligent,while the inclusion of emotion made the virtual humans seem more human- ized. Keywords:virtual intelligent human;affective decision;behavior expression;path planning;smart home 自20世纪80年代初期虚拟现实技术出现以 境的关系提供了新的途径]. 来,其相关领域的研究一直为科学界和工程界所关 虚拟人技术的研究主要集中在4个方面:几何 注山,其涉及领域广泛,包括军事、工业、医疗、娱乐 模型表示、运动控制、行为表达以及智能交互.其中, 等多个方面.应用该技术的行业许多都需要考虑参 前两方面研究起步较早451,目前技术已较为成熟。 与者的人身安全、人体行为的理解以及如何与环境 在外形及动作的逼真性得到满足之后,近年来人们 和谐相处的问题2],因此,就需要对人类自身进行 开始关注于虚拟人的行为表达和智能交互方面的研 研究.三维虚拟人的出现使虚拟现实技术不再是单 究,希望虚拟人的内在也能像真人一般,能够独立思 一的场景模拟,同时也为研究人类自身以及人与环 考与交流.因此,对虚拟人行为和智能的研究成为目 前虚拟人研究的热点[6 收稿日期:2009-1224. 智能虚拟人是指采用人工智能的方法构建具有 基金项目:国家“863”计划资助项目(2007AA01Z160):国家自然科学 基金资助项目(60573059). 自主行为的虚拟人,它应该具有自我判断的能力,可 通信作者:黄晓丹.E-mail:hrd10243005@sina.com

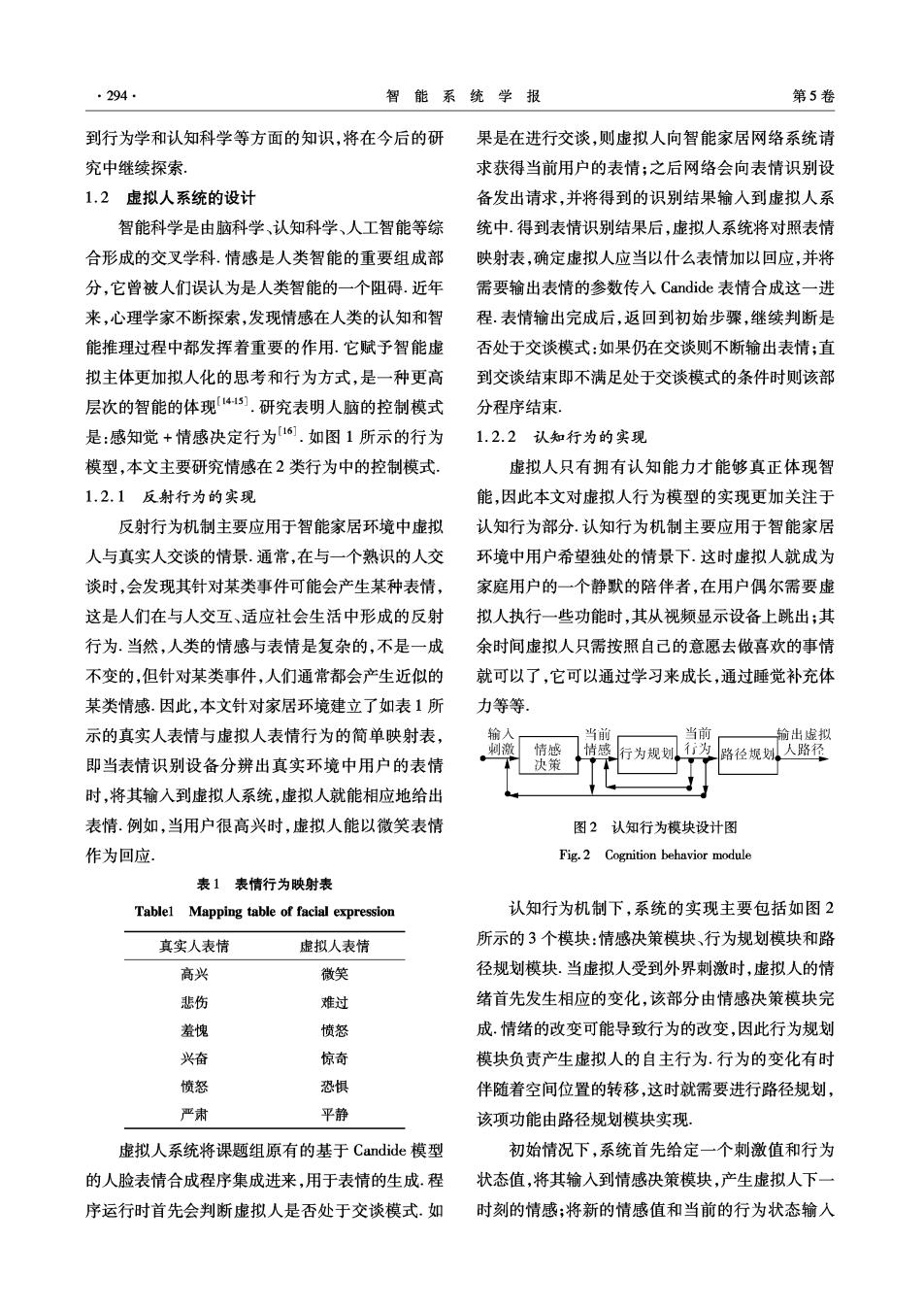
第4期 黄晓丹,等:情感决策的智能家居虚拟人路径规划 ·293· 以在虚拟环境中根据环境的变化做出合适的决 人的行为,人的行为应该是认知和反射2部分行为 策8)].本文将情感引入到虚拟人的智能研究中,通 的结合].基于此观点,本文建立了如图1所示的 过情感对虚拟人的行为产生影响,从而使虚拟人具 虚拟人个体行为模型 有简单的情感决策能力和自主行为规划能力,即具 模型将行为分为了反射行为和认知行为2种 有一定程度上的智能 类型,分别对应反射行为机制和认知行为机制.2部 本文将智能虚拟人具体应用于虚拟智能家居环 分机制的具体实现将在后面小节中进一步阐述.研 境中.智能家居是近年来消费类电子产业发展的一 究表明,反射行为的过程主要是感知+行为;而认知 个新的分支.随着科技的发展与生活水平的提高,人 行为是感知→认知→行为的过程.因此,模型加入认 们开始越来越多地关注于自身生活的舒适度与便捷 知过滤层.2部分行为在接受外部(真实环境)或内 性,于是智能家居的概念成为热点9.智能家电产 部(虚拟环境)的输入时,都需要经过认知过滤层, 品能够帮助人们改善他们日常生活的质量,降低生 该层对反射行为不起任何作用,因此过滤值设为0; 活成本,并提高安全性1,因此,将智能虚拟人应用 而对认知行为起完全作用,因此过滤值设为1. 于虚拟智能家居环境具有广阔的前景, 表情动作快财表 有限软念机制 行为透释算法 1智能虚拟人行为表达系统 1.1虚拟人行为模型 智能来源于人类活动的各种行为,而各种智能 认过滤层 又控制着人们的活动,智能与行为是相辅相成 的,即行为可以产生智能,同时智能又能控制行 直实人的 表情识别 为.因此,虚拟人行为建模并不是单一地对行为进行 拟 环 研究,而是研究行为表达和智能交互之间的关系.简 单地说,行为建模主要研究的是行为选择机制,又称 行为决策机制 图1虚拟人行为模型 虚拟人行为控制方面的建模目前主要包括:个 Fig.1 Behavior model of virtual humam 体行为建模和群体行为建模.个体行为建模研究的 加入认知过滤层主要有2点原因:其一是希望 目标是建立一般性行为模型,但由于人类的行为的 将感知与认知绑定在一起.例如,假设人手被热水烫 复杂性,即使是针对特定应用目前也尚没有良好的 到,人们会条件反射地将手收回,但假如这个人正好 行为模型,建立通用型的行为模型还需要更多的时 受到重大刺激或正在专注于某一重要事情时,可能 间以及对心理学、行为学等多门学科的更深入的研 就不会立刻反应.所以,可以设定,普通情况下,过滤 究和综合.群体行为建模主要研究多虚拟人环境中 器对于条件反射的行为无作用;当发生重大事件,情 的,各虚拟人相互影响后而形成的群体行为,如聚 绪受到影响时,对于这部分行为启动过滤器.其二是 集、跟随等.本文主要研究有关个体行为建模的问 考虑到一些经常发生的认知行为可能逐步转变为反 题,提出了一种基于情感决策的虚拟人行为表达模 射行为,即常说的“经验”,那么认知过滤层的值就 型 会由1变为0.而在转变的过程中,行为则是以一定 智能行为模型包括基于认知模型与基于行为模 概率值表现为反射行为或以一定概率值表现为认知 型2大类2],其中基于行为模型对应简单反射行 行为,这时认知过滤层的值就应该处于0~1之间, 为.一些学者认为纯粹采用反射系统不能完全模拟 对应此概率值.由于具体的转变过程需要深入涉及
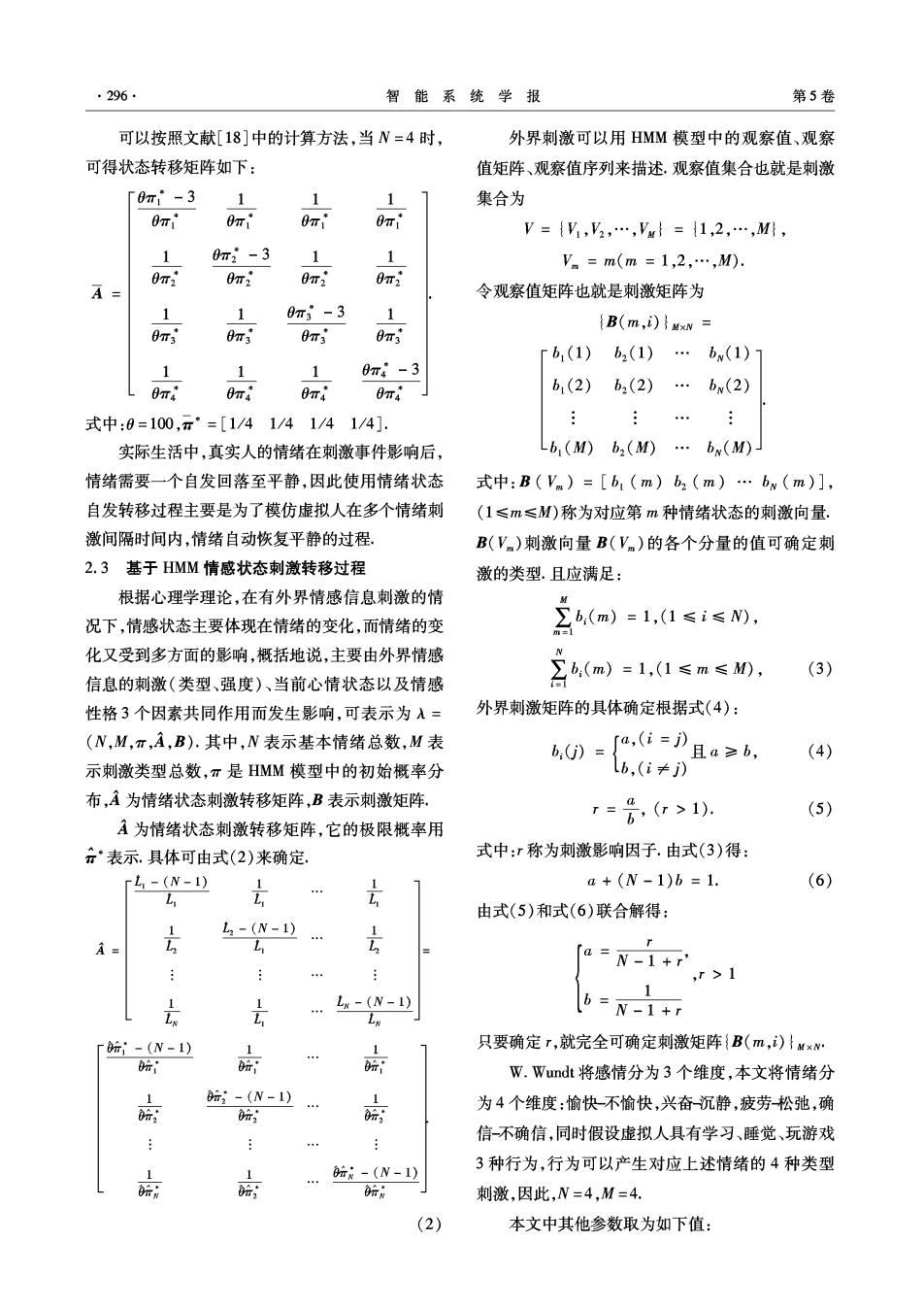
·294 智能系统学报 第5卷 到行为学和认知科学等方面的知识,将在今后的研 果是在进行交谈,则虚拟人向智能家居网络系统请 究中继续探索 求获得当前用户的表情;之后网络会向表情识别设 1.2虚拟人系统的设计 备发出请求,并将得到的识别结果输人到虚拟人系 智能科学是由脑科学、认知科学、人工智能等综 统中.得到表情识别结果后,虚拟人系统将对照表情 合形成的交叉学科.情感是人类智能的重要组成部 映射表,确定虚拟人应当以什么表情加以回应,并将 分,它曾被人们误认为是人类智能的一个阻碍.近年 需要输出表情的参数传人Candide表情合成这一进 来,心理学家不断探索,发现情感在人类的认知和智 程.表情输出完成后,返回到初始步骤,继续判断是 能推理过程中都发挥着重要的作用.它赋予智能虚 否处于交谈模式:如果仍在交谈则不断输出表情;直 拟主体更加拟人化的思考和行为方式,是一种更高 到交谈结束即不满足处于交谈模式的条件时则该部 层次的智能的体现45).研究表明人脑的控制模式 分程序结束 是:感知觉+情感决定行为16.如图1所示的行为 1.2.2认知行为的实现 模型,本文主要研究情感在2类行为中的控制模式 虚拟人只有拥有认知能力才能够真正体现智 1.2.1反射行为的实现 能,因此本文对虚拟人行为模型的实现更加关注于 反射行为机制主要应用于智能家居环境中虚拟 认知行为部分.认知行为机制主要应用于智能家居 人与真实人交谈的情景.通常,在与一个熟识的人交 环境中用户希望独处的情景下.这时虚拟人就成为 谈时,会发现其针对某类事件可能会产生某种表情, 家庭用户的一个静默的陪伴者,在用户偶尔需要虚 这是人们在与人交互、适应社会生活中形成的反射 拟人执行一些功能时,其从视频显示设备上跳出;其 行为.当然,人类的情感与表情是复杂的,不是一成 余时间虚拟人只需按照自己的意愿去做喜欢的事情 不变的,但针对某类事件,人们通常都会产生近似的 就可以了,它可以通过学习来成长,通过睡觉补充体 某类情感.因此,本文针对家居环境建立了如表1所 力等等 示的真实人表情与虚拟人表情行为的简单映射表, 当前 当前 输出墟拟 情感 后 行为规 路径规划,人路径 即当表情识别设备分辨出真实环境中用户的表情 决策 时,将其输入到虚拟人系统,虚拟人就能相应地给出 表情.例如,当用户很高兴时,虚拟人能以微笑表情 图2认知行为模块设计图 作为回应 Fig.2 Cognition behavior module 表1表情行为映射表 Tablel Mapping table of facial expression 认知行为机制下,系统的实现主要包括如图2 真实人表情 虚拟人表情 所示的3个模块:情感决策模块、行为规划模块和路 高兴 微笑 径规划模块.当虚拟人受到外界刺激时,虚拟人的情 悲伤 难过 绪首先发生相应的变化,该部分由情感决策模块完 羞愧 愤怒 成情绪的改变可能导致行为的改变,因此行为规划 兴奋 惊奇 模块负责产生虚拟人的自主行为.行为的变化有时 愤怒 恐惧 伴随着空间位置的转移,这时就需要进行路径规划, 严肃 平静 该项功能由路径规划模块实现 虚拟人系统将课题组原有的基于Candide模型 初始情况下,系统首先给定一个刺激值和行为 的人脸表情合成程序集成进来,用于表情的生成.程 状态值,将其输入到情感决策模块,产生虚拟人下一 序运行时首先会判断虚拟人是否处于交谈模式.如 时刻的情感;将新的情感值和当前的行为状态输入

第4期 黄晓丹,等:情感决策的智能家居虚拟人路径规划 ·295· 到行为规划模块后,得到虚拟人下一时刻的行为状 计算模型,制造出具有初步基本的人类情感或能近 态:行为规划模块还根据当前行为和上一行为判断 似模拟人类的基本情感、能产生和谐与生动有趣的 是否要进人路径规划模块.如果进入路径规划模块, 人机交互环境的情感机器,需要做一些基本的假设 系统将首先进行路径的二维投影,因为在智能家居 和限定 的虚拟仿真环境中,地面较为平坦,虚拟人的行走基 如果用N表示基本情绪总数,i=1,2,…,N表示 本发生在二维平面中,二维路径规划完成后再将路 基本情绪序号,情绪状态可用下面的状态集合表示 径映射回三维虚拟空间中 S={S1,S2,…,Sw}={1,2,…,N}, 本文将在以下章节中依次介绍认知行为机制下 S=i(i=1,2,…,N) 的各个模块涉及的相关理论和算法, 假设1情感机器只具有人类的几种基本情绪 状态.本文中设定N=4, 2虚拟人情感决策 假设2在外界刺激的作用下,情感机器的任 情感能力是人类智能的重要标志,它在人的感知、 意2种情绪状态之间是可以互相转移的. 推理、决策、计划、创造以及社交等诸多活动中起着不 假设3某种刺激确定性地只引发某一种情 可或缺的作用.Gardner提出了多智能概念,指出个 绪,即刺激V:只引发情绪.各种刺激用V:表示,刺 人的智能作为特有的一种人类智能能够处理个人和他 激集合为 人的交往和情感.Damasio通过对人类的脑神经研究, V={V1,V2,…,VM}={1,2,…,M}, 指出缺少情感反应能力的人通常会作出不符合常理的 Vm=m(m=1,2,…,M) 决策,严重的制约了他的社交能力.Mayer和Salovey提 假设4各种基本情绪状态是互相排斥的.即 出了重要的“情感智能”这一概念,后来Goleman引用 刺激m=i应使情绪状态i的强度增加,而其他情绪 了这个概念并形成了目前公认的观点:情感是人类智 状态=i,j=1,2,…,N)的强度减少 能中一个重要的组成部分4 假设5情感状态的变化包括2个过程:心情 现有的较为常用的人工情感计算模型有:MT 状态自发转移和情绪状态刺激转移。 的Juan D.Velasquez提出的Cathexis模型、英国伯明 假设6境状态自发转移的趋势是:总是向着 翰大学的A.Sloman提出的CogAff模型、MT的C. 平静心境状态转移。 Breazeal设计的Kismet模型、Ortony等人提出的 2.2基于马尔可夫链的情感状态自发转移过程 0CC模型等,各种情感模型有各自的优缺点.本文 在情感状态概率空间的基础上,情绪状态自发 采用了课题组研究的情感模型. 转移过程的基本方程为 该模型包括情感状态自发转移和情感状态刺激 P=pA'. (1)》 转移2个过程8].前者是用来模拟人们受到刺激后 式中:P=[p…pw]为初始时刻情绪状态概率分 一段时间内恢复平静的过程,后者是用来模拟人们 布向量;P=[pip吃…Pw]为t时刻情绪状态概率分 受到刺激时情绪的变化.因此,2个过程在实际中是 布向量;A”为t阶情绪状态自发转移矩阵; 交叉产生的,而情感则是随2个过程不断变化的,是 A的极限概率分布为行”=[π1π2…π。].由 时间的连续函数 式imP=云可知,π'表示情绪状态自发转移过程 2.1情感模型的基本假设 最终处于稳定时的心情状态概率分布, 人类的情感是十分复杂的,要想使情感机器具 在式(1)中,P和元°是事先给定的,只要确定 有像人类一样丰富的情感及表现,目前还是十分困 了A,就可利用式(1)计算任意给定时刻的情绪状 难的.为简化问题,建立便于机器实现的情感度量与 态概率分布向量P,当t+时,有P+r‘
296. 智能系统学报 第5卷 可以按照文献[18]中的计算方法,当W=4时, 外界刺激可以用HMM模型中的观察值、观察 可得状态转移矩阵如下: 值矩阵、观察值序列来描述,观察值集合也就是刺激 0π1-3 1 1 集合为 0T Om OT V={V,V2,…,VM}={1,2,…,M, 1 0m2-3 1 Vn=m(m=1,2,…,M). 0m2 0m2 0m2 0m2 A= 令观察值矩阵也就是刺激矩阵为 1 1 0m3-3 1 0m3 0m3 0m3 B(m,i)MxN 0m3 Γb(1) b2(1) …bw(1) 1 1 1 0m4-3 0m4 OT 0m4 0m4 b1(2) b2(2) …bw(2) 式中:0=100,元*=[1/41/41/41/4] 实际生活中,真实人的情绪在刺激事件影响后, Lb1(M)b2(M)… b(M)- 情绪需要一个自发回落至平静,因此使用情绪状态 式中:B(Vn)=[b1(m)b2(m)…bx(m)], 自发转移过程主要是为了模仿虚拟人在多个情绪刺 (1≤m≤M)称为对应第m种情绪状态的刺激向量. 激间隔时间内,情绪自动恢复平静的过程, B(V)刺激向量B(V.)的各个分量的值可确定刺 2.3基于HMM情感状态刺激转移过程 激的类型.且应满足: 根据心理学理论,在有外界情感信息刺激的情 况下,情感状态主要体现在情绪的变化,而情绪的变 (m)=1,1≤i≤M, 化又受到多方面的影响,概括地说,主要由外界情感 信息的刺激(类型、强度)、当前心情状态以及情感 习(m)=1.1≤m≤0, (3) 性格3个因素共同作用而发生影响,可表示为入= 外界刺激矩阵的具体确定根据式(4): (N,M,π,A,B).其中,N表示基本情绪总数,M表 6,0=,i=》且a≥b, 示刺激类型总数,π是HMM模型中的初始概率分 lb,(i≠j) 布,A为情绪状态刺激转移矩阵,B表示刺激矩阵, =分,(>1). A为情绪状态刺激转移矩阵,它的极限概率用 行表示.具体可由式(2)来确定, 式中:r称为刺激影响因子.由式(3)得: rL,-(N-1) 1 a+(N-1)b=1. 6 L L 由式(5)和式(6)联合解得: 1 L2-(N-1) r A L L L [a=N-1+r ,r>1 1 1 Lw-(N-1) b=N -1+r T防;-(N-1) 只要确定r,就完全可确定刺激矩阵{B(m,i)}MxN 皖 品 W.Wundt将感情分为3个维度,本文将情绪分 m-(N-1) 1 品; 为4个维度:愉快不愉快,兴奋沉静,疲劳松弛,确 0ig 信-不确信,同时假设虚拟人具有学习、睡觉、玩游戏 m8-(N-1) 3种行为,行为可以产生对应上述情绪的4种类型 防N 刺激,因此,N=4,M=4. (2) 本文中其他参数取为如下值: