
14-3旋转矢量 第十四章机械振动 讨论 相位差:表示两个相位之差 1)对同一简谐运动,相位差可以给出两运动状 态间变化所需的时间.△p=(wt2+p)-(ωt,+p) x=Acos(ot+p) △0 x=Acos(ot,+) △t=t2-t1= 0 A A/2 A △0= △t= 元/3 3 2元
14 – 3 旋转矢量 第十四章 机械振动 A − A x A 2 t o a b x − A 0 A 讨论 ➢ 相位差:表示两个相位之差 . 1)对同一简谐运动,相位差可以给出两运动状 态间变化所需的时间. ( ) ( ) = t 2 + − t 1 + cos( ) x = A t 1 + cos( ) x = A t 2 + t = t 2 − t 1 = a t 3 π = t T T 6 1 2π π 3 = = v 2 A b t
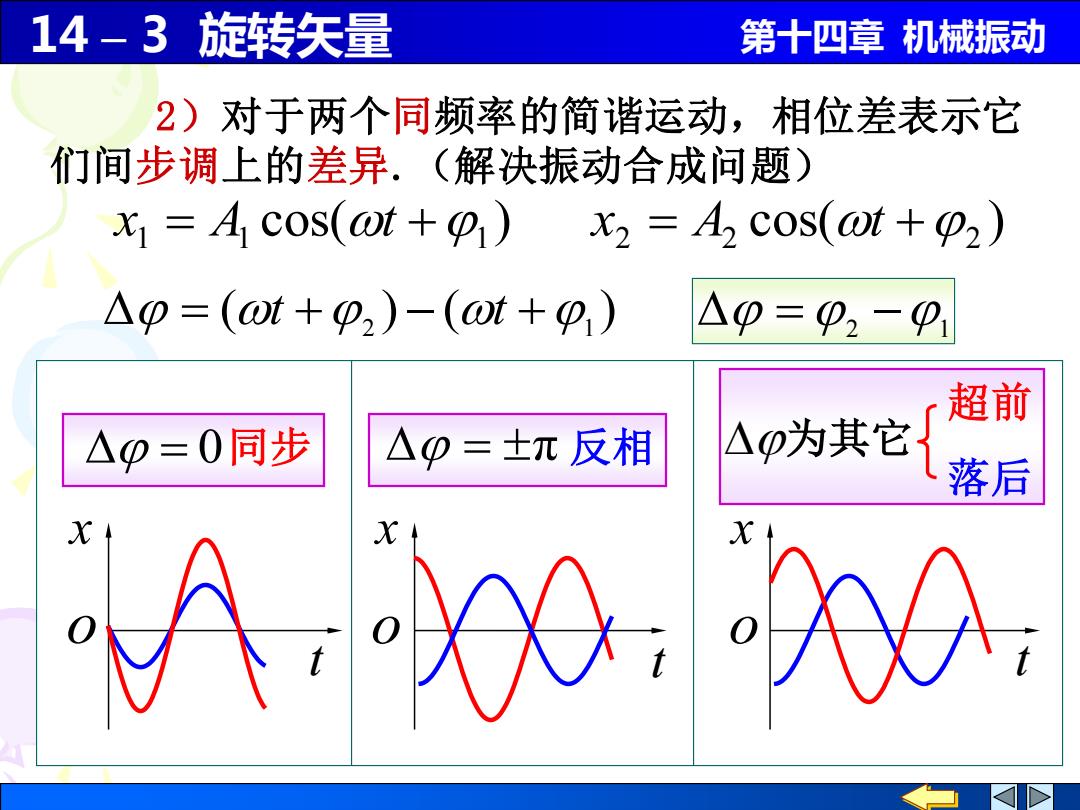
14-3旋转矢量 第十四章机械振动 2)对于两个同频率的简谐运动,相位差表示它 们间步调上的差异.(解决振动合成问题) x1=A,c0S(⊙t+p) x2=A2C0s(⊙t+p2) △p=(⊙t+p2)-(ot+p) △0=p2-p 超前 △0=0同步 △0=士π反相 △0为其它 落后 .X0,0
14 – 3 旋转矢量 第十四章 机械振动 = 0 x t o 同步 2)对于两个同频率的简谐运动,相位差表示它 们间步调上的差异.(解决振动合成问题) cos( ) 1 = 1 +1 x A t cos( ) 2 = 2 +2 x A t ( ) ( ) = + 2 − +1 t t = 2 −1 x t o 为其它 超前 落后 t x o = π 反相