第11卷第3期 智能系统学报 Vol.11 No.3 2016年6月 CAAI Transactions on Intelligent Systems Jun.2016 D0I:10.11992/is.201504022 网络出版地址:http://www.cmki.net/kcms/detail/23.1538.tp.201509030.1456.002.html 智能手机车辆异常驾驶行为检测方法 周后飞123,刘华平23,石红星4 (1.重庆交通大学土木工程学院,重庆400074:2.清华大学计算机科学与技术系,北京100084:3.清华大学智能技 术与系统国家重点实验室,北京100084:4.北京城建道桥建设集团有限公司,北京100080) 摘要:将智能手机作为车辆异常驾驶行为检测工具,设计了一种车辆异常驾驶行为检测方法和系统。系统通过获 取车载智能手机内部的加速度传感器数据、陀螺仪传感器数据以及磁场传感器数据,经坐标旋转和特征提取,并利 用基于核方法极限学习机(核ELM)得到的驾驶行为在线分析算法,以实现能实时识别包括频繁变道、频繁变速及急 刹车在内的多种车辆异常驾驶行为,并在车辆出现异常驾驶行为时开启报警语音。测试结果表明,基于核ELM算法 的驾驶行为分类器性能比基于支持向量机(SVM)算法更好,提出的异常驾驶行为检测系统能有效识别各种驾驶 行为。 关键词:智能手机:异常驾驶行为检测:传感器:核方法:极限学习机:支持向量机 中图分类号:TP29:U49文献标志码:A文章编号:1673-4785(2016)01-0410-08 中文引用格式:周后飞,刘华平,石红星,等.智能手机车辆异常驾驶行为检测方法[J].智能系统学报,2016,02(1):410417. 英文引用格式:ZHOU Houfei,LIU Huaping,SHI Hongxing,etal.Abnormal driving behavior detection based on the smart phone [J].CAAI Transactions on Intelligent Systems,2016,02(1):410-417. Abnormal driving behavior detection based on the smart phone ZHOU Houfei,LIU Huaping,SHI Hongxing' (1.School of Civil Architecture Engineering,Chongqing Jiaotong University,Chongqing 400074,China;2.Department of Computer Science and Technology,Tsinghua University,Beijing 100084,China;3.State Key Laboratory of Intelligent Technology and Systems, Tsinghua University,Beijing 100084,China;4.Road and Bridge Construction Group Co.,Ltd.of Beijing,Beijing 100080,China) Abstract:Using the smart phone as a tool for detecting abnormal driving behavior,this paper designs an abnormal driving behavior detection method and a practical system.First,the system obtains data from the acceleration,mag- netic,and gyroscope sensors of an on-board smart phone.Then,through coordinate rotation,feature extraction, and an online driving behavior analysis algorithm,which is based on the kernel extreme learning machine (ELM) algorithm,the system identifies real-time abnormal driving behavior,including frequent lane-changing,frequent speed-changing,and emergency braking.It then sets off an alarm when abnormal driving behavior has been identi- fied.Test results indicate that the driving behavior classifier,which is based on the kernel ELM algorithm,performs better than the support vector machine algorithm.In addition,the proposed abnormal driving behavior detection sys- tem can effectively identify various driving behaviors. Keywords:smart phone;abnormal driving behavior detection;sensor;kernel method;extreme learning machine (ELM);support vector machine 近年来,国内外研究人员相继研究利用智能手 研究主要集中在人体行为识别领域[],但也有部 机识别各种行为。目前,基于智能手机的模式识别 分学者尝试将智能手机应用到车辆驾驶行为识别方 收稿日期:2015-04-09.网络出版日期:2015-09-30. 面。其中,Dai等)将车载智能手机的加速度和方 基金项目:国家重点基础研究与发展计划项目(2013CB329403). 向传感器数据作为车辆的运行参数来检测醉驾行 通信作者:刘华平hpliu@tsinghua..edu.cm
第 11 卷第 3 期 智 能 系 统 学 报 Vol.11 №.3 2016 年 6 月 CAAI Transactions on Intelligent Systems Jun. 2016 DOI:10.11992 / tis.201504022 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.tp.201509030.1456.002.html 智能手机车辆异常驾驶行为检测方法 周后飞1,2,3 ,刘华平2,3 ,石红星4 (1.重庆交通大学 土木工程学院,重庆 400074; 2.清华大学 计算机科学与技术系,北京 100084; 3.清华大学 智能技 术与系统国家重点实验室,北京 100084; 4.北京城建道桥建设集团有限公司,北京 100080) 摘 要:将智能手机作为车辆异常驾驶行为检测工具,设计了一种车辆异常驾驶行为检测方法和系统。 系统通过获 取车载智能手机内部的加速度传感器数据、陀螺仪传感器数据以及磁场传感器数据,经坐标旋转和特征提取,并利 用基于核方法极限学习机(核 ELM)得到的驾驶行为在线分析算法,以实现能实时识别包括频繁变道、频繁变速及急 刹车在内的多种车辆异常驾驶行为,并在车辆出现异常驾驶行为时开启报警语音。 测试结果表明,基于核 ELM 算法 的驾驶行为分类器性能比基于支持向量机( SVM) 算法更好,提出的异常驾驶行为检测系统能有效识别各种驾驶 行为。 关键词:智能手机;异常驾驶行为检测;传感器;核方法;极限学习机;支持向量机 中图分类号:TP29;U49 文献标志码:A 文章编号:1673⁃4785(2016)01⁃0410⁃08 中文引用格式:周后飞,刘华平,石红星,等.智能手机车辆异常驾驶行为检测方法[J]. 智能系统学报, 2016, 02(1): 410⁃417. 英文引用格式:ZHOU Houfei, LIU Huaping, SHI Hongxing,et al. Abnormal driving behavior detection based on the smart phone [J]. CAAI Transactions on Intelligent Systems, 2016, 02(1): 410⁃417. Abnormal driving behavior detection based on the smart phone ZHOU Houfei 1,2,3 , LIU Huaping 2,3 , SHI Hongxing 4 (1.School of Civil & Architecture Engineering, Chongqing Jiaotong University, Chongqing 400074, China; 2. Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China; 3. State Key Laboratory of Intelligent Technology and Systems, Tsinghua University, Beijing 100084, China; 4. Road and Bridge Construction Group Co., Ltd. of Beijing, Beijing 100080, China) Abstract:Using the smart phone as a tool for detecting abnormal driving behavior, this paper designs an abnormal driving behavior detection method and a practical system. First, the system obtains data from the acceleration, mag⁃ netic, and gyroscope sensors of an on⁃board smart phone. Then, through coordinate rotation, feature extraction, and an online driving behavior analysis algorithm, which is based on the kernel extreme learning machine (ELM) algorithm, the system identifies real⁃time abnormal driving behavior, including frequent lane⁃changing, frequent speed⁃changing, and emergency braking. It then sets off an alarm when abnormal driving behavior has been identi⁃ fied. Test results indicate that the driving behavior classifier, which is based on the kernel ELM algorithm, performs better than the support vector machine algorithm. In addition, the proposed abnormal driving behavior detection sys⁃ tem can effectively identify various driving behaviors. Keywords:smart phone; abnormal driving behavior detection; sensor; kernel method; extreme learning machine (ELM); support vector machine 收稿日期:2015⁃04⁃09. 网络出版日期:2015⁃09⁃30. 基金项目:国家重点基础研究与发展计划项目(2013CB329403). 通信作者:刘华平.hpliu@ tsinghua.edu.cn. 近年来,国内外研究人员相继研究利用智能手 机识别各种行为。 目前,基于智能手机的模式识别 研究主要集中在人体行为识别领域[1⁃6] ,但也有部 分学者尝试将智能手机应用到车辆驾驶行为识别方 面。 其中,Dai 等[7] 将车载智能手机的加速度和方 向传感器数据作为车辆的运行参数来检测醉驾行
第3期 周后飞,等:智能手机车辆异常驾驶行为检测方法 ·411. 为。Paefgen等]用车载智能手机传感器信号来评 进一步改善。可见,基于智能手机的驾驶行为识别 估各类驾驶行为,但算法鲁棒性较弱:Xu等[9利用 研究还处于探索阶段,研究工作有待进一步推进和 车载智能手机拍摄照片,开展了基于人眼图像的疲 完善。为此,本文开展了基于智能手机的车辆异常 劳驾驶检测技术研究。Erent1o]等利用车载智能手 驾驶行为检测技术研究。论文主要工作有: 机加速度传感器、陀螺仪传感器、磁场传感器数据来 1)利用智能手机实时采集车体运动状态,提出 识别车辆的驾驶行为,并把车辆驾驶行为分为了安 了异常驾驶行为检测方法框架,并针对左变道、右变 全和不安全两大类。Fazeen]等比较了车载智能 道、加速、减速、急刹车、正常行驶等6类驾驶行为分 手机的加速度传感器数据和专业设备采集的车辆行 析了手机传感器数据的特性; 驶过程中的加速度数据,结果显示,两者高度吻合, 2)设计了基于核ELM的驾驶行为在线分析算 车载智能手机的加速度传感器数据可以用来表征车 法和异常驾驶行为检测算法; 辆自身的加速度。在利用车载智能手机进行交通事 3)开发了“车辆异常驾驶行为监控系统”软件, 故检测方面,李伟健等[]通过设定手机加速度传感 并在实际运行中测试了其性能。 器数值变化阈值来检测车辆碰撞事故:赵龙等]在 1 李伟健等基础上,将基于单部车载手机的碰撞事故 方法框架 识别技术提升到基于多部车载手机。但文献[11 本文提出的异常驾驶行为检测方法框架如图1 13]均通过阈值法来进行事故判断,识别效果有待 所示。 加速 度传 正常 感器 加速 度的 左变道 数据 校正 数据 核 异常 陀螺 右变道 ELM 仪传 姿旋转 加速 感器 识别 异常判断 数据 角速 减速 度的 算法 磁场 急刹车 校正 传感 数据 器数 据 图1方法框架 Fig.1 The framework of the proposed method 方法流程包括: 速度,g,表示绕Y轴的角速度,g表示绕Z轴的角 1)利用车载手机的运动状态表征车体运动状态: 速度,单位ad/s),以及数据采集时刻t。 2)通过车载手机内部的传感器获得手机的动 数据采集过程中,手机按照手机体坐标系Y轴正 态参数; 向向前与车头正向平行,Z轴垂直于水平面向上的姿 3)将获得的手机动态参数旋转校正至在特定 态放置(把这种放置姿态叫做“标准姿态”,采集的数据 坐标系下的数据: 叫做“标准数据”)。手机体坐标系如图2所示。 4)提取经旋转校正后的手机动态参数的特征: Z轴正向 5)用分类器识别车载手机的运动状态,并在此 基础上识别车辆是否出现本文所定义的异常行为。 2车载手机数据分析 。Y轴正向 为分析车载手机在车辆不同驾驶行为状态下的 动态参数特征,采集了手机在车辆加速、减速、左变 道、右变道、急刹车、正常行驶等多种情况下的数据, X轴正向 数据包括手机加速度传感器数据A=[a,a,a](其 中,a.表示手机X轴的加速度,a,表示Y轴的加速 图2手机体坐标系 度,a.表示Z轴的加速度,单位m/s)、陀螺仪传感 Fig.2 Coordinate system of the smart phone 器数据G=[g.g,8](其中g.表示绕手机X轴的角
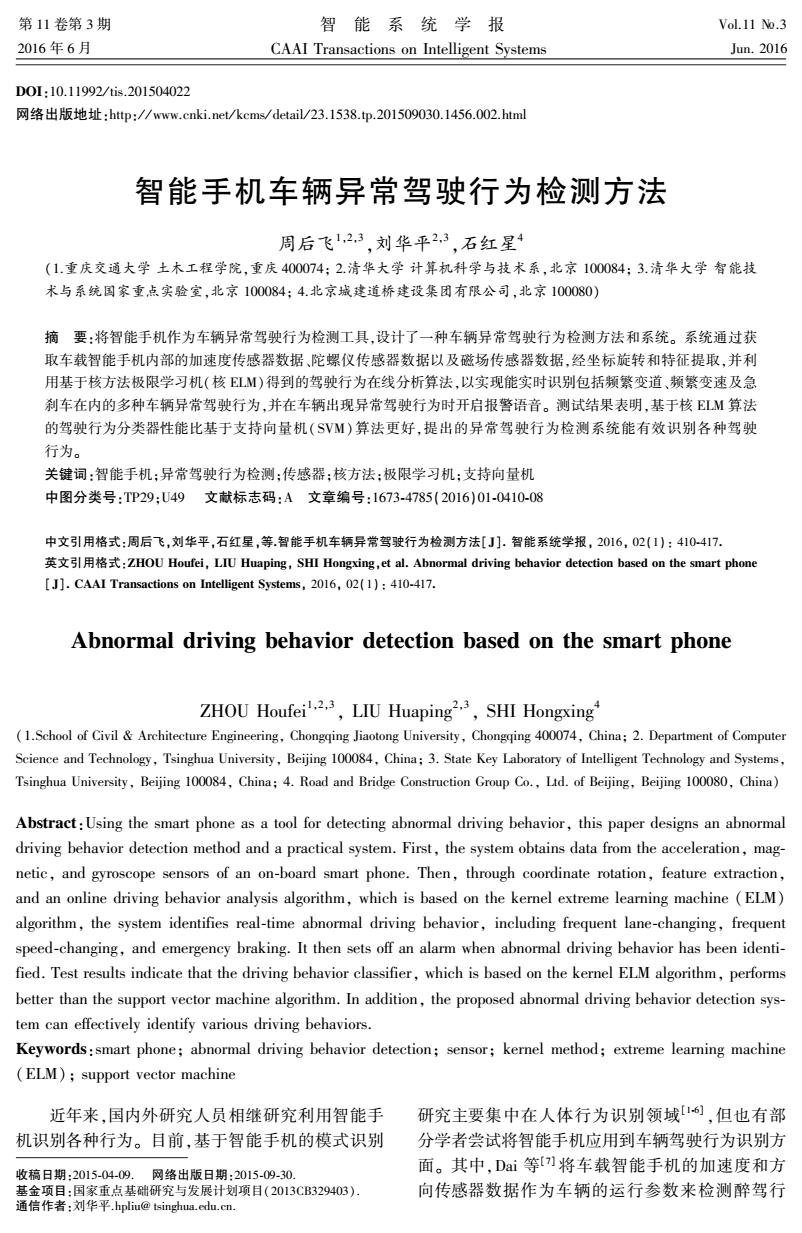
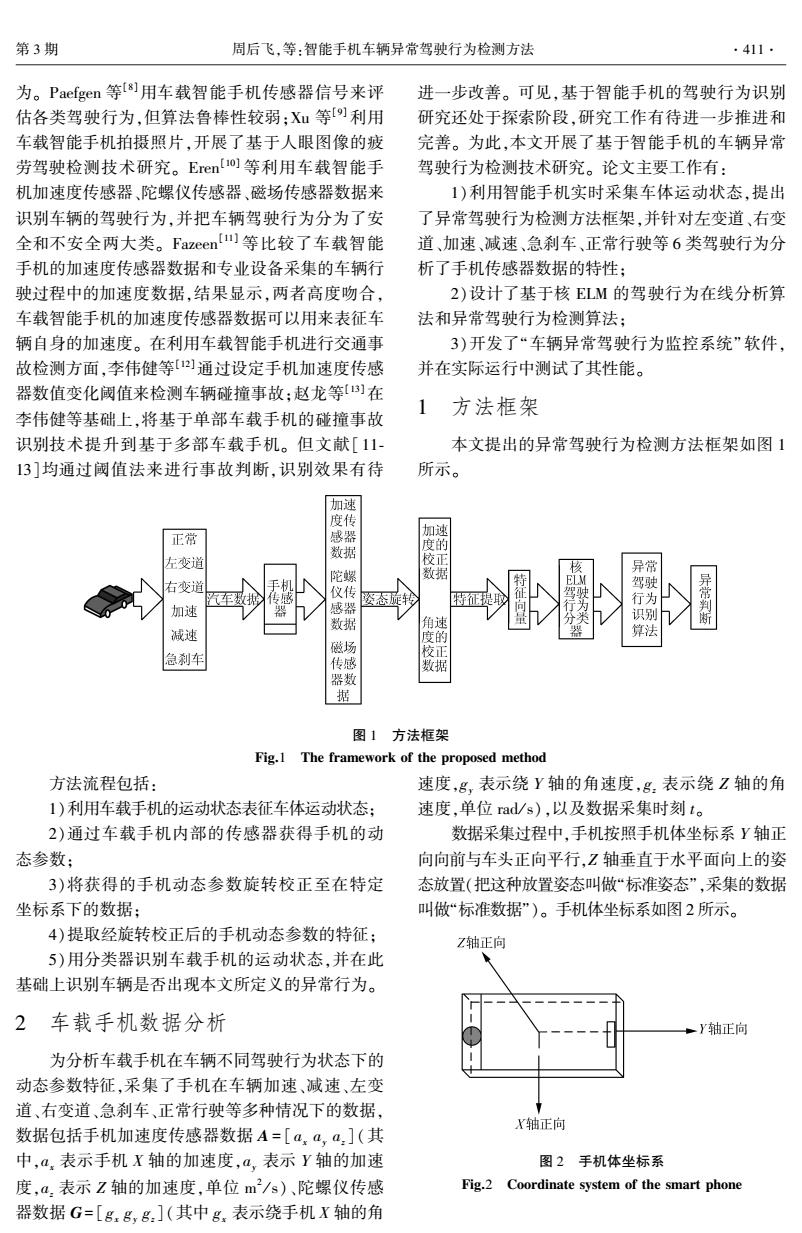
为。 Paefgen 等[8]用车载智能手机传感器信号来评 估各类驾驶行为,但算法鲁棒性较弱;Xu 等[9] 利用 车载智能手机拍摄照片,开展了基于人眼图像的疲 劳驾驶检测技术研究。 Eren [10] 等利用车载智能手 机加速度传感器、陀螺仪传感器、磁场传感器数据来 识别车辆的驾驶行为,并把车辆驾驶行为分为了安 全和不安全两大类。 Fazeen [11] 等比较了车载智能 手机的加速度传感器数据和专业设备采集的车辆行 驶过程中的加速度数据,结果显示,两者高度吻合, 车载智能手机的加速度传感器数据可以用来表征车 辆自身的加速度。 在利用车载智能手机进行交通事 故检测方面,李伟健等[12]通过设定手机加速度传感 器数值变化阈值来检测车辆碰撞事故;赵龙等[13] 在 李伟健等基础上,将基于单部车载手机的碰撞事故 识别技术提升到基于多部车载手机。 但文献[11⁃ 13]均通过阈值法来进行事故判断,识别效果有待 进一步改善。 可见,基于智能手机的驾驶行为识别 研究还处于探索阶段,研究工作有待进一步推进和 完善。 为此,本文开展了基于智能手机的车辆异常 驾驶行为检测技术研究。 论文主要工作有: 1)利用智能手机实时采集车体运动状态,提出 了异常驾驶行为检测方法框架,并针对左变道、右变 道、加速、减速、急刹车、正常行驶等 6 类驾驶行为分 析了手机传感器数据的特性; 2)设计了基于核 ELM 的驾驶行为在线分析算 法和异常驾驶行为检测算法; 3)开发了“车辆异常驾驶行为监控系统”软件, 并在实际运行中测试了其性能。 1 方法框架 本文提出的异常驾驶行为检测方法框架如图 1 所示。 图 1 方法框架 Fig.1 The framework of the proposed method 方法流程包括: 1)利用车载手机的运动状态表征车体运动状态; 2)通过车载手机内部的传感器获得手机的动 态参数; 3)将获得的手机动态参数旋转校正至在特定 坐标系下的数据; 4)提取经旋转校正后的手机动态参数的特征; 5)用分类器识别车载手机的运动状态,并在此 基础上识别车辆是否出现本文所定义的异常行为。 2 车载手机数据分析 为分析车载手机在车辆不同驾驶行为状态下的 动态参数特征,采集了手机在车辆加速、减速、左变 道、右变道、急刹车、正常行驶等多种情况下的数据, 数据包括手机加速度传感器数据 A = [ax ay az] (其 中,ax 表示手机 X 轴的加速度,ay 表示 Y 轴的加速 度,az 表示 Z 轴的加速度,单位 m 2 / s)、陀螺仪传感 器数据 G = [gx gy gz](其中 gx 表示绕手机 X 轴的角 速度,gy 表示绕 Y 轴的角速度,gz 表示绕 Z 轴的角 速度,单位 rad / s),以及数据采集时刻 t。 数据采集过程中,手机按照手机体坐标系 Y 轴正 向向前与车头正向平行,Z 轴垂直于水平面向上的姿 态放置(把这种放置姿态叫做“标准姿态”,采集的数据 叫做“标准数据”)。 手机体坐标系如图 2 所示。 图 2 手机体坐标系 Fig.2 Coordinate system of the smart phone 第 3 期 周后飞,等:智能手机车辆异常驾驶行为检测方法 ·411·

.412 智能系统学报 第11卷 采集数据同时,人为标定车辆的加速起始时间 T(i=1,2,…)和终止时间T(Gj=1,2,…)、减速起 始时间T(i=1,2,…)和终止时间T=1,2,…)、 左变道起始时间T,(i=1,2,…)和终止时间T(= 1,2,…)、右变道起始时间T.(i=1,2,…)和终止时 间T(=1,2,…),急刹车起始时间T(i=1,2,…)》 5001000 5001000 500 1000 t/ms n 和终止时间T(G=1,2,…)。 (e)左变道过程加速度变化 对比手机内部存储的时间1和人为标定的驾驶 行为起始时间和终止时间,提取从T(i=1,2,3…) 1.00 1.00m 0.07 0.05 0.05 0.06 到Tj=1,2,…)、T(i=1,2,…)到T(=1,2, 0 0.05 -0.04 …)、T(i=1,2,…)到T(=1,2,…)、T(i=1,2, -0.05 -0.05 -0.03 0-0.10 -0.10 -002 …)到T,j=1,2,…)和T(i=1,2,…)到T,(j=1, -0.15 -0.15 -0.01 5001000 5001000 5001000 2,…)时间段内的手机三轴加速度数据A=[a.a t/ms t/ms a]和绕三轴角速度数据G=[gg,g:]作分析。 ()右变道过程角速度变化 车载手机传感器数据在几种车辆驾驶行为状况 下的参数变化如图3所示(每幅图片的第1张表示 0.10 0.10[ 0.08 X轴参数变化,第2张是Y轴参数变化,第3张是Z 0.05 0.05h1 轴参数变化)。 0 004 -0.05 60.02 0.5 13 12 -015 0.10L 0 5001000 0 5001000 05001000 S-W 11 tmin t/min tmin (g)左变道过程角速度变化 5001000 5001000 5001000 (ms (a)正常行驶加速度变化 12 0.5 14 0.5 10 10 10 246 ms /ms t/ms -2.0 5001000 5001000 5001000 (/ms (h)急刹车过程加速度变化 (b)减速过程加速度变化 图3不同驾驶行为参数变化图 Fig.3 Parameters curves corresponding to various 0.5 12 0 driving behaviors -0.5 10 1)分析图3(a),手机三轴加速度在车辆正常行 -1.0 -1.5 驶过程中数据特征不明显。 -2.0 -2. 2)分析图3(),手机Y轴加速度在车辆减速行 0 5001000 0 5001000 5001000 t/ms t/ms t/ms 驶过程中逐步由0减小至负值,车辆完成减速趋于 (c)加速过程加速度变化 平稳后又返回0值,Y轴加速度数据特征明显。 3)分析图3(c),手机Y轴加速度在车辆加速行 驶过程中逐步由0增加至正值,车辆完成加速趋于 平稳后又返回0值,Y轴加速度数据特征明显,但与 减速过程恰好相反。 4)分析图3(d)和图3(f),手机X轴加速度和 5001000 '05001000 /05001000 (ms ms t/ms 绕Z轴角速度在车辆右变道行驶过程中数据特征 (d)右变道过程加速度变化 明显
采集数据同时,人为标定车辆的加速起始时间 Tai(i = 1,2,…)和终止时间 Taj( j = 1,2,…)、减速起 始时间 Tdi(i = 1,2,…)和终止时间 Tdj(j = 1,2,…)、 左变道起始时间Tli(i = 1,2,…) 和终止时间 Tlj( j = 1,2,…)、右变道起始时间 Tri(i = 1,2,…)和终止时 间 Trj(j = 1,2,…),急刹车起始时间 Tsi( i = 1,2,…) 和终止时间 Tsj(j = 1,2,…)。 对比手机内部存储的时间 t 和人为标定的驾驶 行为起始时间和终止时间,提取从 Tai( i = 1,2,3…) 到 Taj(j = 1,2,…)、Tdi( i = 1,2,…) 到 Tdj( j = 1,2, …)、Tli(i = 1,2,…) 到 Tlj( j = 1,2,…)、Tri( i = 1,2, …)到 Trj(j = 1,2,…)和 Tsi( i = 1,2,…)到 Tsj( j = 1, 2,…)时间段内的手机三轴加速度数据 A = [ ax ay az]和绕三轴角速度数据 G = [gx gy gz]作分析。 车载手机传感器数据在几种车辆驾驶行为状况 下的参数变化如图 3 所示(每幅图片的第 1 张表示 X 轴参数变化,第 2 张是 Y 轴参数变化,第 3 张是 Z 轴参数变化)。 (a)正常行驶加速度变化 (b)减速过程加速度变化 (c)加速过程加速度变化 (d)右变道过程加速度变化 (e)左变道过程加速度变化 (f)右变道过程角速度变化 (g)左变道过程角速度变化 (h)急刹车过程加速度变化 图 3 不同驾驶行为参数变化图 Fig. 3 Parameters curves corresponding to various driving behaviors 1)分析图 3(a),手机三轴加速度在车辆正常行 驶过程中数据特征不明显。 2)分析图 3(b),手机 Y 轴加速度在车辆减速行 驶过程中逐步由 0 减小至负值,车辆完成减速趋于 平稳后又返回 0 值,Y 轴加速度数据特征明显。 3)分析图 3(c),手机 Y 轴加速度在车辆加速行 驶过程中逐步由 0 增加至正值,车辆完成加速趋于 平稳后又返回 0 值,Y 轴加速度数据特征明显,但与 减速过程恰好相反。 4)分析图 3(d)和图 3(f),手机 X 轴加速度和 绕 Z 轴角速度在车辆右变道行驶过程中数据特征 明显。 ·412· 智 能 系 统 学 报 第 11 卷
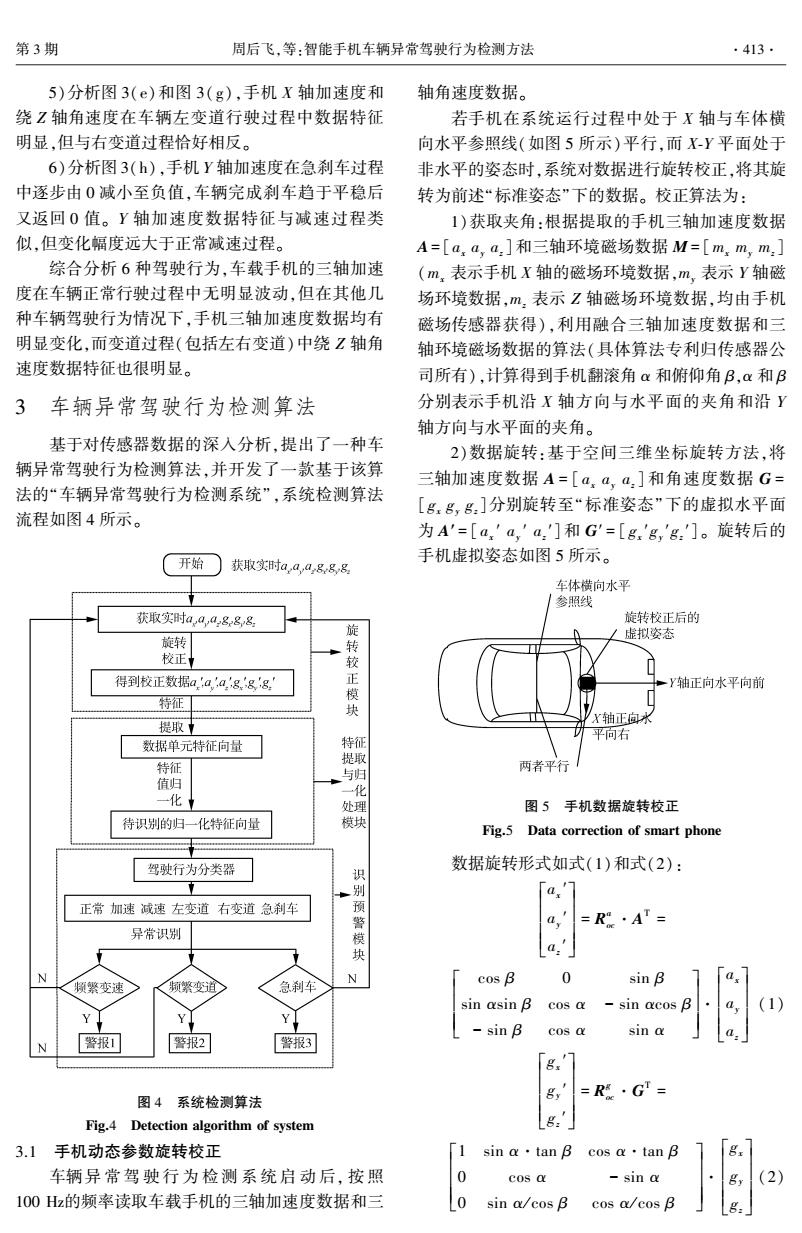
第3期 周后飞,等:智能手机车辆异常驾驶行为检测方法 ·413. 5)分析图3(e)和图3(g),手机X轴加速度和 轴角速度数据。 绕Z轴角速度在车辆左变道行驶过程中数据特征 若手机在系统运行过程中处于X轴与车体横 明显,但与右变道过程恰好相反。 向水平参照线(如图5所示)平行,而X-Y平面处于 6)分析图3(h),手机Y轴加速度在急刹车过程 非水平的姿态时,系统对数据进行旋转校正,将其旋 中逐步由0减小至负值,车辆完成刹车趋于平稳后 转为前述“标准姿态”下的数据。校正算法为: 又返回0值。Y轴加速度数据特征与减速过程类 1)获取夹角:根据提取的手机三轴加速度数据 似,但变化幅度远大于正常减速过程。 A=[a,a,a.]和三轴环境磁场数据M=[m.m,m,] 综合分析6种驾驶行为,车载手机的三轴加速 (m,表示手机X轴的磁场环境数据,m,表示Y轴磁 度在车辆正常行驶过程中无明显波动,但在其他几 场环境数据,m,表示Z轴磁场环境数据,均由手机 种车辆驾驶行为情况下,手机三轴加速度数据均有 磁场传感器获得),利用融合三轴加速度数据和三 明显变化,而变道过程(包括左右变道)中绕Z轴角 轴环境磁场数据的算法(具体算法专利归传感器公 速度数据特征也很明显。 司所有),计算得到手机翻滚角α和俯仰角B,α和B 3车辆异常驾驶行为检测算法 分别表示手机沿X轴方向与水平面的夹角和沿Y 轴方向与水平面的夹角。 基于对传感器数据的深入分析,提出了一种车 2)数据旋转:基于空间三维坐标旋转方法,将 辆异常驾驶行为检测算法,并开发了一款基于该算 三轴加速度数据A=[aa,a.]和角速度数据G= 法的“车辆异常驾驶行为检测系统”,系统检测算法 [g.8,g]分别旋转至“标准姿态”下的虚拟水平面 流程如图4所示。 为A'=[ax'a,'a:']和G=[gx'g,'g:'门。旋转后的 开始 获取实时aa,a,888 手机虚拟姿态如图5所示。 车体横向水平 参照线 获取实时a,0,a,88,8 旋转校正后的 旋 旋转 虚拟姿态 校正 得到校正数据aa,aggg.' 特征 正模块 Y轴正向水平向前 X轴正向水 提取 特征 平向右 数据单元特征向量 特征 提取 与 两者平行 值 一化1 化 处理 图5手机数据旋转校正 待识别的归一化特征向量 模块 Fig.5 Data correction of smart phone 驾驶行为分类器 数据旋转形式如式(1)和式(2): 识 别 正常加速诚速左变道右变道急刹车 警 =R·AT= 异常识别 块 a: N N 频繁变道 cos B 0 頫繁变速> 急刹车 sin B a sin asin B cos a sin acos B 1) 4 -sin B cos a sin a N 警报] 警报2 警报3 a: 87 图4系统检测算法 =R·G= Fig.4 Detection algorithm of system Lg.'」 3.1手机动态参数旋转校正 1 sina·tanB cosa·tanB 车辆异常驾驶行为检测系统启动后,按照 0 cos a sin a (2) 100Hz的频率读取车载手机的三轴加速度数据和三 0 sin a/cos B cos a/eos B
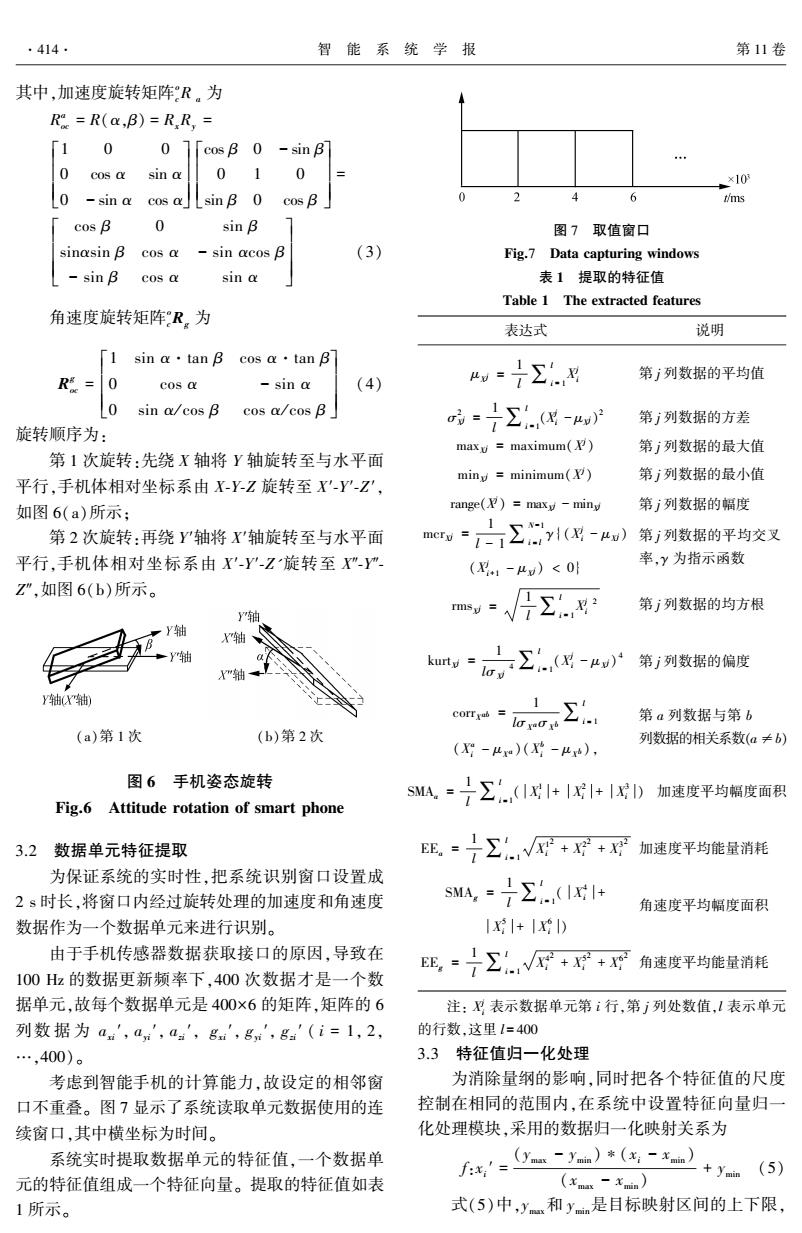
5)分析图 3(e)和图 3( g),手机 X 轴加速度和 绕 Z 轴角速度在车辆左变道行驶过程中数据特征 明显,但与右变道过程恰好相反。 6)分析图 3(h),手机 Y 轴加速度在急刹车过程 中逐步由 0 减小至负值,车辆完成刹车趋于平稳后 又返回 0 值。 Y 轴加速度数据特征与减速过程类 似,但变化幅度远大于正常减速过程。 综合分析 6 种驾驶行为,车载手机的三轴加速 度在车辆正常行驶过程中无明显波动,但在其他几 种车辆驾驶行为情况下,手机三轴加速度数据均有 明显变化,而变道过程(包括左右变道)中绕 Z 轴角 速度数据特征也很明显。 3 车辆异常驾驶行为检测算法 基于对传感器数据的深入分析,提出了一种车 辆异常驾驶行为检测算法,并开发了一款基于该算 法的“车辆异常驾驶行为检测系统”,系统检测算法 流程如图 4 所示。 图 4 系统检测算法 Fig.4 Detection algorithm of system 3.1 手机动态参数旋转校正 车辆异 常 驾 驶 行 为 检 测 系 统 启 动 后, 按 照 100 Hz的频率读取车载手机的三轴加速度数据和三 轴角速度数据。 若手机在系统运行过程中处于 X 轴与车体横 向水平参照线(如图 5 所示)平行,而 X⁃Y 平面处于 非水平的姿态时,系统对数据进行旋转校正,将其旋 转为前述“标准姿态”下的数据。 校正算法为: 1)获取夹角:根据提取的手机三轴加速度数据 A= [ax ay az]和三轴环境磁场数据 M = [mx my mz] (mx 表示手机 X 轴的磁场环境数据,my 表示 Y 轴磁 场环境数据,mz 表示 Z 轴磁场环境数据,均由手机 磁场传感器获得),利用融合三轴加速度数据和三 轴环境磁场数据的算法(具体算法专利归传感器公 司所有),计算得到手机翻滚角 α 和俯仰角 β,α 和 β 分别表示手机沿 X 轴方向与水平面的夹角和沿 Y 轴方向与水平面的夹角。 2)数据旋转:基于空间三维坐标旋转方法,将 三轴加速度数据 A = [ ax ay az ] 和角速度数据 G = [gx gy gz]分别旋转至“标准姿态”下的虚拟水平面 为 A′ = [ ax ′ ay ′ az ′]和 G′ = [ gx ′gy ′gz ′]。 旋转后的 手机虚拟姿态如图 5 所示。 图 5 手机数据旋转校正 Fig.5 Data correction of smart phone 数据旋转形式如式(1)和式(2): ax ′ ay ′ az ′ é ë ê ê ê ê ù û ú ú ú ú = R a oc·A T = cos β 0 sin β sin αsin β cos α - sin αcos β cos αcos β - sin β cos α sin α é ë ê ê êê ù û ú ú úú · ax ay az é ë ê ê ê ê ù û ú ú ú ú (1) gx ′ gy ′ gz ′ é ë ê ê ê ê ù û ú ú ú ú = R g oc·G T = 1 sin α·tan β cos α·tan β 0 cos α - sin α 0 sin α/ cos β cos α/ cos β é ë ê ê êê ù û ú ú úú · gx gy gz é ë ê ê ê ê ù û ú ú ú ú (2) 第 3 期 周后飞,等:智能手机车辆异常驾驶行为检测方法 ·413·
414 智能系统学报 第11卷 其中,加速度旋转矩阵R。为 R"=R(a,B)=R,R,= 「1 0 01「cosB0 -sin B 0 cos sin a 0 1 0 ×10 sin a cos a Lsin B 0 cosB」 6 t/ms cos B 0 sin B 图7取值窗口 sinasin B cos a sin acos B (3) Fig.7 Data capturing windows sin B cos a sin a 表1提取的特征值 Table 1 The extracted features 角速度旋转矩阵R。为 表达式 说明 「1 sina·tanB cosa·tanB 0 cos a sin a 4 m=1g 第j列数据的平均值 sin a/cos B cosa/cosB」 时=∑W-w 第j列数据的方差 旋转顺序为: maxy maximum() 第j列数据的最大值 第1次旋转:先绕X轴将Y轴旋转至与水平面 miny minimum() 第j列数据的最小值 平行,手机体相对坐标系由X-Y-Z旋转至X'-Y'-Z', 如图6(a)所示: range(P)=maxw-minv j列数据的幅度 第2次旋转:再绕Y'轴将X'轴旋转至与水平面 mry(u) j列数据的平均交叉 平行,手机体相对坐标系由X'-Y-Z旋转至X”" (1-μ)<0 ,y为指示函数 Z”,如图6(b)所示。 第j列数据的均方根 y轴 m“Σ, Y轴 X轴 Y轴 第j列数据的偏度 X"轴 a六2-w Y轴(X轴 cor=I 第a列数据与第b (a)第1次 (b)第2次 列数据的相关系数(a≠b) (X程-4)(-46), 图6手机姿态旋转 Fig.6 Attitude rotation of smart phone SA,=子∑((++XD加速度平均解度面积 3.2数据单元特征提取 EE=十∑√风++加速度平均能量消耗 为保证系统的实时性,把系统识别窗口设置成 2s时长,将窗口内经过旋转处理的加速度和角速度 sA,=∑(x+ 角速度平均幅度面积 数据作为一个数据单元来进行识别。 |x|+1XI) 由于手机传感器数据获取接口的原因,导致在 比,=∑V厅+了+了角速度平均能量消耗 100Hz的数据更新频率下,400次数据才是一个数 据单元,故每个数据单元是400×6的矩阵,矩阵的6 注:足表示数据单元第i行,第j列处数值,1表示单元 列数据为am',a',aa',8m',8t',8ai'(i=1,2, 的行数,这里1=400 …,400)。 3.3特征值归一化处理 考虑到智能手机的计算能力,故设定的相邻窗 为消除量纲的影响,同时把各个特征值的尺度 口不重叠。图7显示了系统读取单元数据使用的连 控制在相同的范围内,在系统中设置特征向量归一 续窗口,其中横坐标为时间。 化处理模块,采用的数据归一化映射关系为 系统实时提取数据单元的特征值,一个数据单 fx'--ym)*(,-x -+ymim(5) 元的特征值组成一个特征向量。提取的特征值如表 (xmx-xmn) 1所示。 式(5)中,y和yn是目标映射区间的上下限
其中,加速度旋转矩阵o cR a 为 R a oc = R(α,β) = RxRy = 1 0 0 0 cos α sin α 0 - sin α cos α é ë ê ê êê ù û ú ú úú cos β 0 - sin β 0 1 0 sin β 0 cos β é ë ê ê êê ù û ú ú úú = cos β 0 sin β sinαsin β cos α - sin αcos β cos αcos β - sin β cos α sin α é ë ê ê ê ù û ú ú ú (3) 角速度旋转矩阵o cRg 为 R g oc = 1 sin α·tan β cos α·tan β 0 cos α - sin α 0 sin α/ cos β cos α/ cos β é ë ê ê êê ù û ú ú úú (4) 旋转顺序为: 第 1 次旋转:先绕 X 轴将 Y 轴旋转至与水平面 平行,手机体相对坐标系由 X⁃Y⁃Z 旋转至 X′⁃Y′⁃Z′, 如图 6(a)所示; 第 2 次旋转:再绕 Y′轴将 X′轴旋转至与水平面 平行,手机体相对坐标系由 X′⁃Y′⁃Z'旋转至 X″⁃Y″⁃ Z″,如图 6(b)所示。 (a)第 1 次 (b)第 2 次 图 6 手机姿态旋转 Fig.6 Attitude rotation of smart phone 3.2 数据单元特征提取 为保证系统的实时性,把系统识别窗口设置成 2 s 时长,将窗口内经过旋转处理的加速度和角速度 数据作为一个数据单元来进行识别。 由于手机传感器数据获取接口的原因,导致在 100 Hz 的数据更新频率下,400 次数据才是一个数 据单元,故每个数据单元是 400×6 的矩阵,矩阵的 6 列数 据 为 axi ′, ayi ′, azi ′, gxi ′, gyi ′, gzi ′ ( i = 1, 2, …,400)。 考虑到智能手机的计算能力,故设定的相邻窗 口不重叠。 图 7 显示了系统读取单元数据使用的连 续窗口,其中横坐标为时间。 系统实时提取数据单元的特征值,一个数据单 元的特征值组成一个特征向量。 提取的特征值如表 1 所示。 图 7 取值窗口 Fig.7 Data capturing windows 表 1 提取的特征值 Table 1 The extracted features 表达式 说明 μ X j = 1 l ∑ l i = 1 X j i 第 j 列数据的平均值 σ 2 X j = 1 l ∑ l i = 1 (X j i - μX j) 2 第 j 列数据的方差 maxX j = maximum(X j ) 第 j 列数据的最大值 minX j = minimum(X j ) 第 j 列数据的最小值 range(X j ) = maxX j - minX j 第 j 列数据的幅度 mcrX j = 1 l - 1∑ N-1 i = l γ{(X j i - μ X j) (X j i+1 - μ X j) < 0} 第 j 列数据的平均交叉 率,γ 为指示函数 rmsX j = 1 l ∑ l i = 1 X j i 2 第 j 列数据的均方根 kurtX j = 1 lσX j 4∑ l i = 1 (X j i - μ X j) 4 第 j 列数据的偏度 corrX ab = 1 lσX aσX b∑ l i = 1 (X a i - μ X a )(X b i - μ X b), 第 a 列数据与第 b 列数据的相关系数(a ≠b) SMAa = 1 l ∑ l i = 1 ( X 1 i + X 2 i + X 3 i ) 加速度平均幅度面积 EEa = 1 l ∑ l i = 1 X 1 2 i + X 2 2 i + X 3 2 i 加速度平均能量消耗 SMAg = 1 l ∑ l i = 1 ( X 4 i + X 5 i + X 6 i ) 角速度平均幅度面积 EEg = 1 l ∑ l i = 1 X 4 2 i + X 5 2 i + X 6 2 i 角速度平均能量消耗 注: X j i 表示数据单元第 i 行,第 j 列处数值,l 表示单元 的行数,这里 l = 400 3.3 特征值归一化处理 为消除量纲的影响,同时把各个特征值的尺度 控制在相同的范围内,在系统中设置特征向量归一 化处理模块,采用的数据归一化映射关系为 f:xi ′ = (ymax - ymin )∗(xi - xmin ) (xmax - xmin ) + ymin (5) 式(5)中,ymax和 ymin是目标映射区间的上下限, ·414· 智 能 系 统 学 报 第 11 卷