社,2020. (三)其它课程资源 1.南阳师范学院网络教学平台http:/mooc1.chaoxing.com/course/206809373.htm 2.中国慕课平台https:/wW.icoursel63.org/ 3.凌阳单片机http:/www.unsp.com.cn 4.平凡单片机工作室http:/ww.mcustudio.com 5.周立功单片机世界http:/ww.zlgmcu.com 6.单片机爱好者http:/小ww.mcufan.com 7.单片机资源网http:/www.kj-pub.com 8.21IC中国电子网http:/ww.21ic.com 执笔人:程艺苑 参与人:李华洋、张雷 课程负责人:程艺苑 审核人(系/教研室主任): 审定人(主管教学副院长/副主任): 2020年月 -23-
—23— 社,2020. (三)其它课程资源 1.南阳师范学院网络教学平台 http://mooc1.chaoxing.com/course/206809373.html 2.中国慕课平台 https://www.icourse163.org/ 3.凌阳单片机 http://www.unsp.com.cn 4.平凡单片机工作室 http://www.mcustudio.com 5.周立功单片机世界 http://www.zlgmcu.com 6.单片机爱好者 http://www.mcufan.com 7.单片机资源网 http://www.kj-pub.com 8.21IC 中国电子网 http://www.21ic.com 执笔人:程艺苑 参与人:李华洋、张雷 课程负责人:程艺苑 审核人(系/教研室主任): 审定人(主管教学副院长/副主任): 2020 年 月
《现代控制理论》课程教学大纲 一、课程信息 课程名称:现代控制理论 Modern Control Theory 课程代码:69010203 课程类别:必修课 适用专业:自动化专业 渠程学时:32学时 课程学分:2学分 修读学期:第5学期 先修课程:高等数学,线性代数,自动控制理论 课内实验(实践):无 二、课程目标 (一)其体目标 通过本课程的学习,使学生达到以下目标: 1,掌握线性系统状态空间法的有关基础理论,包括对状态空问方程的建立、转态 空间方程的解、系统的可控性与可观性、系统的状态反馈控制器与状态观测器的设计 等。【支撑毕业要求1】 2.培养学生深刻理解现代控制理论的本质及其在自动化工程中的应用,为以后从 事多交量控制系统开发工作打下良好的基础。【支撑毕业要求2、3】 3.培养学生的人文社会科学素养和社会责任感,能够在控制工程复杂系统设计、 运行与维护过程中理解并遵守工程职业道德规范,履行相应的贵任。【支撑毕业要求 5、9】 (二)课程目标与毕业要求的对应关系 表1课程目标与毕业要求的对应关系 课程目标 支撑的毕业要求 支撑的毕业要求指标点 -24-
—24— 《现代控制理论》课程教学大纲 一、课程信息 课程名称:现代控制理论 Modern Control Theory 课程代码:69010203 课程类别:必修课 适用专业:自动化专业 课程学时:32学时 课程学分:2学分 修读学期:第5学期 先修课程:高等数学,线性代数,自动控制理论 课内实验(实践):无 二、课程目标 (一)具体目标 通过本课程的学习,使学生达到以下目标: 1.掌握线性系统状态空间法的有关基础理论,包括对状态空间方程的建立、转态 空间方程的解、系统的可控性与可观性、系统的状态反馈控制器与状态观测器的设计 等。【支撑毕业要求 1】 2.培养学生深刻理解现代控制理论的本质及其在自动化工程中的应用,为以后从 事多变量控制系统开发工作打下良好的基础。【支撑毕业要求2、3】 3.培养学生的人文社会科学素养和社会责任感,能够在控制工程复杂系统设计、 运行与维护过程中理解并遵守工程职业道德规范,履行相应的责任。【支撑毕业要求 5、9】 (二)课程目标与毕业要求的对应关系 表1 课程目标与毕业要求的对应关系 课程目标 支撑的毕业要求 支撑的毕业要求指标点
1一2穿握系统状态空阿方程的建立,状态空间方程的 解、可拉性与可现性等相关蒸础知识与专业知识,具 备设计控制系统状态反销控制器与状态观测器的知识 与技能,能够应用其基本理论和基本方法分析自动化 领城复杂工柱问题。 13字提系铣的Ly即 nov移定性分析方法、状态反 课程目标1 1.工知识 喷与输出反续等多种控制策略,能够以学生为中心, 系统开展控制系饨设计,能够针对自动化工程领城复 杂工问题进行分析和设计, 1-4拿模全维状态观测器的设计、降维状态现测的设 计方法等相关基础知识与专业知识,备进行对控制 方法进行验证与仿真知识与技能,能够将其嫁合应用 于研究和解决自动化控制领城复杂工程问题。 2-1能够识别和判断现代控例工程何题中的关健坏节) 和参数,并结合专业知识进行有效分解。 3-1能够针对多输入多数愉出线性定常系统工柱问题 2.同题分析 程目标2 3.设计/开发解决方蒙 进行需枣分新,设计解决方案和满足特定需求的单无 (那件)、系统, 了3能够针对线性定常系饨控制领城特定窝本,设计 或开发硬件系统,并体现创新意识。 1能嘉基狼用发制系仿钻件分折未袋系用 性、受控系统性能,并能运用图表、公式等手段表述 课程目标3 5.使用现代工 和解决线性定常系统控制器与观测器的设计问通。 52能恰影使用计算机软、硬件技术、算法仿真工 具,完成自动化控制项的模拟与仿真分析,能理解 其局限性。 ⑨-1能够主动与其他学科的成员合作共事,能独立究 课程目标4 9.个人和团队 成国队分配的工作。 三、课程内容 (一)课程内容与课程目标的关系 表2课程内容与课程目标的关系 课程内容 教学方法支撑的课程目标学时安排 第一现代控制理论迷 讲授法、专题所计课卷目标1,2.3 2 第二章控制系统的状态空 讲授法 课程目1、2 6
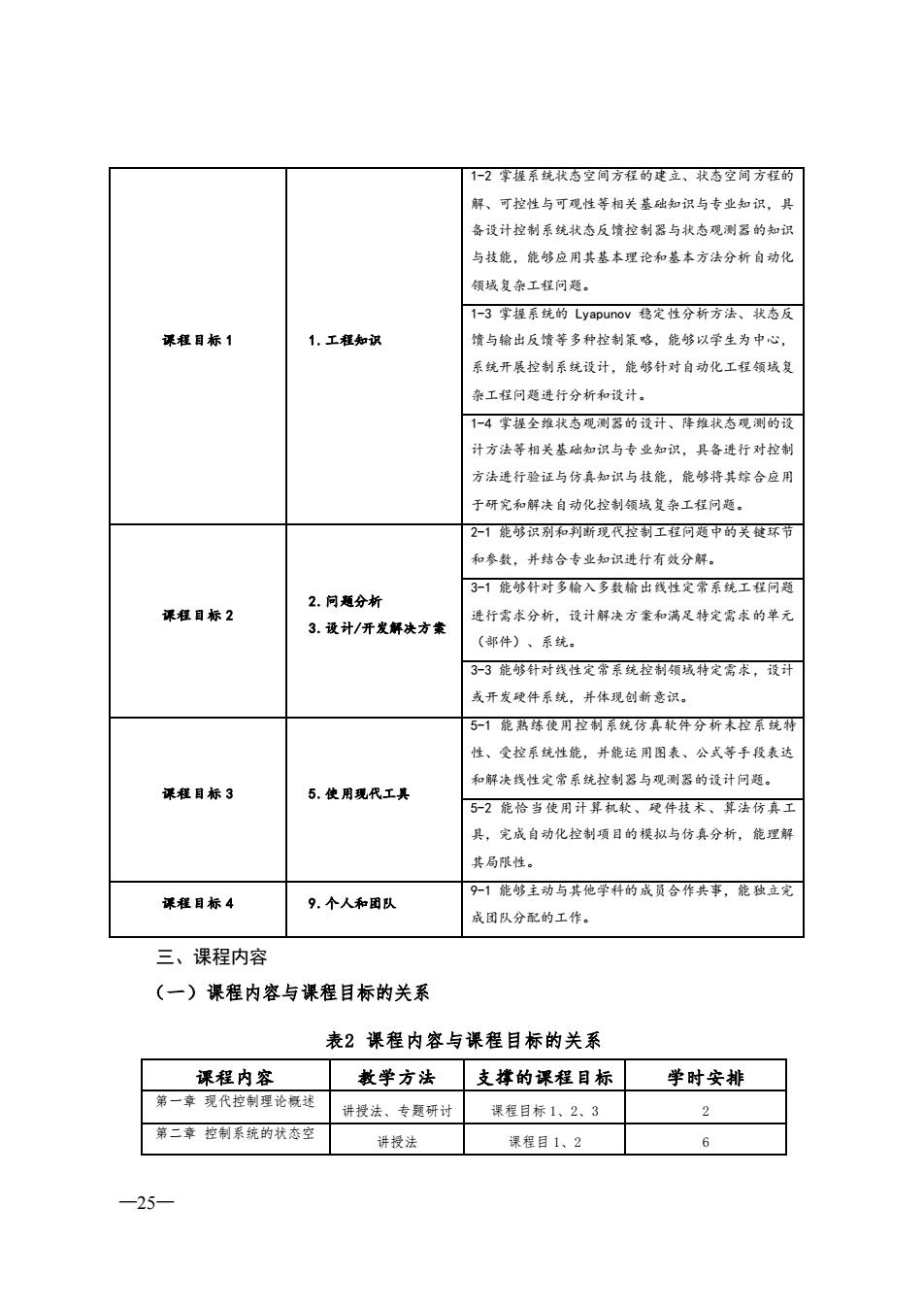
—25— 课程目标 1 1.工程知识 1-2 掌握系统状态空间方程的建立、状态空间方程的 解、可控性与可观性等相关基础知识与专业知识,具 备设计控制系统状态反馈控制器与状态观测器的知识 与技能,能够应用其基本理论和基本方法分析自动化 领域复杂工程问题。 1-3 掌握系统的 Lyapunov 稳定性分析方法、状态反 馈与输出反馈等多种控制策略,能够以学生为中心, 系统开展控制系统设计,能够针对自动化工程领域复 杂工程问题进行分析和设计。 1-4 掌握全维状态观测器的设计、降维状态观测的设 计方法等相关基础知识与专业知识,具备进行对控制 方法进行验证与仿真知识与技能,能够将其综合应用 于研究和解决自动化控制领域复杂工程问题。 课程目标 2 2.问题分析 3.设计/开发解决方案 2-1 能够识别和判断现代控制工程问题中的关键环节 和参数,并结合专业知识进行有效分解。 3-1 能够针对多输入多数输出线性定常系统工程问题 进行需求分析,设计解决方案和满足特定需求的单元 (部件)、系统。 3-3 能够针对线性定常系统控制领域特定需求,设计 或开发硬件系统,并体现创新意识。 课程目标 3 5.使用现代工具 5-1 能熟练使用控制系统仿真软件分析未控系统特 性、受控系统性能,并能运用图表、公式等手段表达 和解决线性定常系统控制器与观测器的设计问题。 5-2 能恰当使用计算机软、硬件技术、算法仿真工 具,完成自动化控制项目的模拟与仿真分析,能理解 其局限性。 课程目标 4 9.个人和团队 9-1 能够主动与其他学科的成员合作共事,能独立完 成团队分配的工作。 三、课程内容 (一)课程内容与课程目标的关系 表2 课程内容与课程目标的关系 课程内容 教学方法 支撑的课程目标 学时安排 第一章 现代控制理论概述 讲授法、专题研讨 课程目标 1、2、3 2 第二章 控制系统的状态空 讲授法 课程目 1、2 6
问方程 第三季控利系统状态空可 表达式的解 讲授法 课程目标1、2 6 第四幸线性控制系统的能 控性与能观性 讲授油 课程目标1、2 6 第五章系统的稳定性与 Lyapunov方法 讲授油 课程目标1、2 6 第六章线性系统的综合 讲授法、案例教学 课程目标1,2 6 合计 32学时 (二)具体内容 第一章现代控制理论概述 【学习目标】 1.了解《现代控制理论》课程的内容和要求。 2.掌握现代控制理论学习特点、方法和专业发展的途径;能够通过图书馆或网 络检索查询现代控制理论的期刊。 3.具有人文社会科学素养和社会责任感,能够在工业自动化系统设计、运行与 维护过程中理解并遵守工程职业道德和规范,履行相应的责任。 【学习内容】 第一章 现代控制理论概述·理论/口实践学时 2 1.一级知识点 控制理论的性质。 控制理论的发展。 控制理论的应用。 控制一个动态系统的几个基本步骤。 2.二级知识点 控制理论发展的三个阶段。 控制一个动态系统的建模、系统辨识、信号处理、控制的综合。 现代控制理论的基本流派、发展历程。 本课程的先验知识与主要内容与学习方法。 -26-
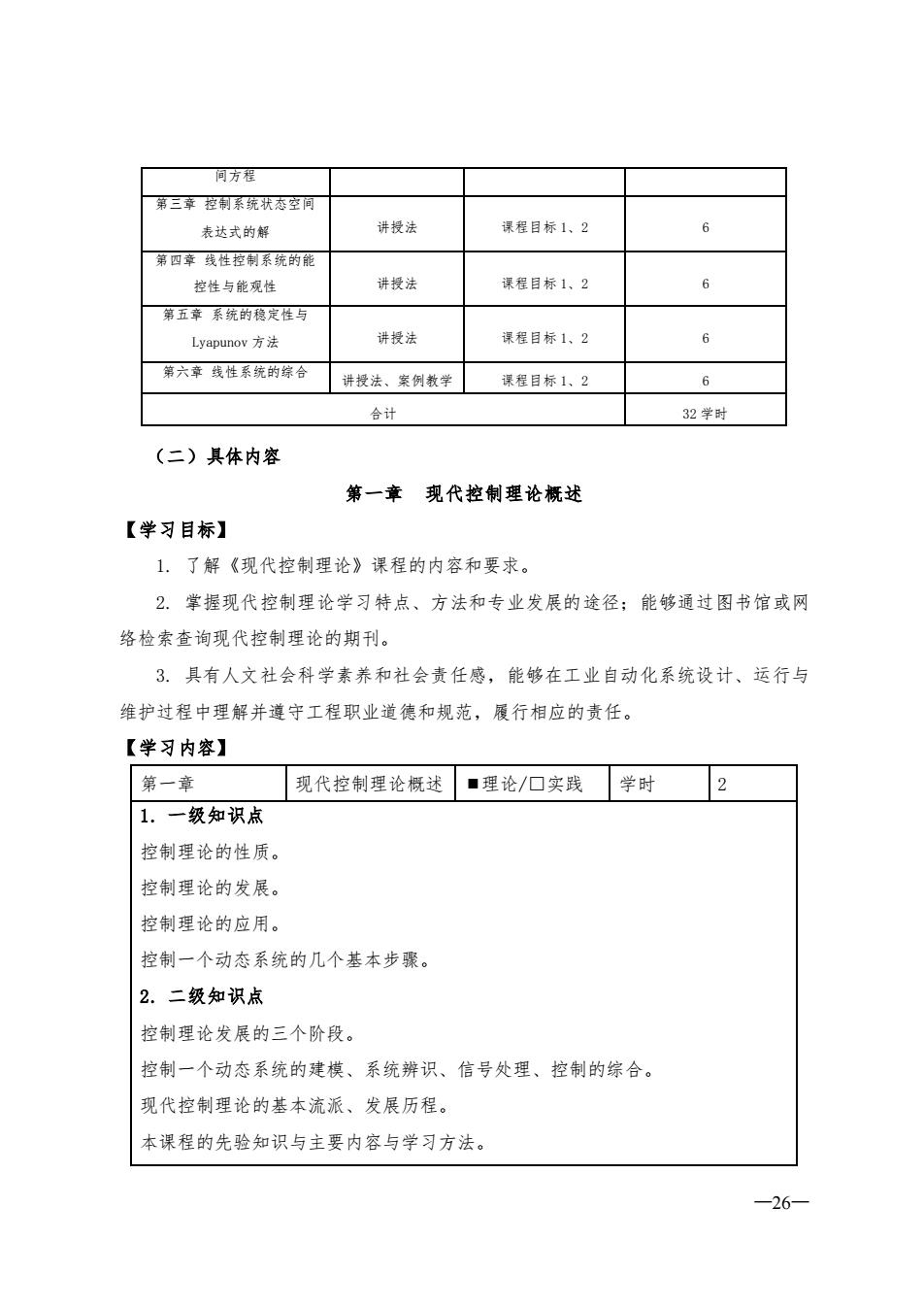
—26— 间方程 第三章 控制系统状态空间 表达式的解 讲授法 课程目标 1、2 6 第四章 线性控制系统的能 控性与能观性 讲授法 课程目标 1、2 6 第五章 系统的稳定性与 Lyapunov 方法 讲授法 课程目标 1、2 6 第六章 线性系统的综合 讲授法、案例教学 课程目标 1、2 6 合计 32 学时 (二)具体内容 第一章 现代控制理论概述 【学习目标】 1. 了解《现代控制理论》课程的内容和要求。 2. 掌握现代控制理论学习特点、方法和专业发展的途径;能够通过图书馆或网 络检索查询现代控制理论的期刊。 3. 具有人文社会科学素养和社会责任感,能够在工业自动化系统设计、运行与 维护过程中理解并遵守工程职业道德和规范,履行相应的责任。 【学习内容】 第一章 现代控制理论概述 理论/□实践 学时 2 1. 一级知识点 控制理论的性质。 控制理论的发展。 控制理论的应用。 控制一个动态系统的几个基本步骤。 2. 二级知识点 控制理论发展的三个阶段。 控制一个动态系统的建模、系统辨识、信号处理、控制的综合。 现代控制理论的基本流派、发展历程。 本课程的先验知识与主要内容与学习方法
3.三级知识点 并掌握制理论发展的各阶段的主要任务。 人工智能与现代控制理论。 现代控制理论未来的发展趋势, 【学习重点】 1.了解控制理论发展的三个阶段并掌握各阶段的主要任务。 【学习难点】 1.控制理论发展历程及各阶段的标志性成果。 第二章控制系统的状态空间方程 【学习目标】 1.了解状态空间描述的基本概念,掌握根据物理机理来建立状态空间表达式。 掌握状态空问表达式的建立方法。 2.学握根据系统微分方程建立状态空间表达式的方法 3.掌握系统传递函数矩阵也是线性定常系统的一种描述。 4,了解离散系统空问表达式的建立方法。 【学习内容】 控制系统的状态空 第二章 间方程 理论/口实践 学时 1.一级知识点 状态变量及状态空间表达式。 状态变量及状态空间表达式的模拟结构图。 状态变量及状态空问表达式的建立。 状态矢量的线性变换。 由状态空间表达式求传递函数 离散系统的状态空问表达式。 时变系统的状态空间表达式。 27
—27— 3. 三级知识点 并掌握制理论发展的各阶段的主要任务。 人工智能与现代控制理论。 现代控制理论未来的发展趋势。 【学习重点】 1.了解控制理论发展的三个阶段并掌握各阶段的主要任务。 【学习难点】 1.控制理论发展历程及各阶段的标志性成果。 第二章 控制系统的状态空间方程 【学习目标】 1. 了解状态空间描述的基本概念,掌握根据物理机理来建立状态空间表达式。 掌握状态空间表达式的建立方法。 2. 掌握根据系统微分方程建立状态空间表达式的方法 3. 掌握系统传递函数矩阵也是线性定常系统的一种描述。 4. 了解离散系统空间表达式的建立方法。 【学习内容】 第二章 控制系统的状态空 间方程 理论/□实践 学时 6 1. 一级知识点 状态变量及状态空间表达式。 状态变量及状态空间表达式的模拟结构图。 状态变量及状态空间表达式的建立。 状态矢量的线性变换。 由状态空间表达式求传递函数。 离散系统的状态空间表达式。 时变系统的状态空间表达式