第10卷第2期 智能系统学报 Vol.10 No.2 2015年4月 CAAI Transactions on Intelligent Systems Apr.2015 D0:10.3969/j.issn.1673-4785.201503006 网络出版地址:htp:/www.cmki.net/kcms/detail/23.1538.TP.20150326.1013.001.html 主要海洋环境因素对水下航行器航行影响分析 王奎民 (中国人民解放军海军驻锦州地区军事代表室,辽宁锦州121000) 摘要:分析总结了水下航行器的自身结构、环境和任务的特点以及复杂海洋环境对航行器的安全造成的威胁。从 海流干扰、海水透明度、跃层及海洋内波等水文环境要素的形成原理及其对航行器的影响等方面,分别总结了各主 要海洋环境因素对水下航行器航行状态的有利与不利影响,同时避免各要素直接或间接造成的各种不利影响的方 法,结合航行器自身的结构特点和任务需求,充分利用海洋环境因素,可以使航行器在安全性、经济性、操纵性以及 作战能力等方面有较大的增强和改善。提出根据不同任务对海洋环境因素做威胁权值评估,并根据其威胁度,在自 主航路规划过程中适当修订航线。通过仿真验证了该方法对航路准确定和安全性的提高。 关键词:水文环境:水下航行器:海流干扰:海水透明度:跃层;海洋内波 中图分类号:TP391文献标志码:A文章编号:1673-4785(2015)02-0316-07 中文引用格式:王奎民.主要海洋环境因素对水下航行器航行影响分析[J].智能系统学报,2015,10(2):316-323. 英文引用格式:WANG Kuimin.Influence of main ocean environments on the navigation of underwater vehicles[J].CAAI Transac- tions on Intelligent Systems,2015,10(2):316-323. Influence of main ocean environments on the navigation of underwater vehicles WANG Kuimin (Navy Military Representative Office in Jinzhou,Jinzhou 121000,China) Abstract:This paper analyzes the characteristics of underwater vehicle's configuration,environment and missions, and the menace of complex ocean environment.The advantage and disadvantage of the main ocean environmental factors to the navigation states of underwater vehicles,as well as the methods for avoiding all kinds of disadvanta- geous influences caused by all kinds of factors are concluded.The main areas consist of current disturbance,seawa- ter transparency,thermal layer and ocean internal wave.The vehicle enhancement and improvement in the perform- ance of security,economy,maneuverability and operational performance can occur by combining the configuration characteristic of underwater vehicle and the mission requirements.This paper proposes to assess the threat weight of the ocean environmental factors according to different missions based on the degree of threat and underwater vehicle modified route in its autonomous sailing.Finally,the simulation proved that the method increases the accuracy and safety of its route. Keywords:hydrological environment;underwater vehicle;current disturbance;seawater transparency;thermal layer;ocean internal wave 海洋占据地球70%的面积并且蕴含着丰富的 至军事上的利用成为各种争夺的焦点。水下航行器 生物资源、海洋矿物资源等。因此,对海洋的民用甚 作为勘测和开发海洋资源最有效的工具被各国重 视。水下航行器以其水下隐蔽航行作战、灵活机动 收稿日期:2015-03-04.网络出版日期:2015-03-26. 基金项目:国家自然科学基金资助项目(51179038). 以及极强的水下攻击力而著称,经常被应用在探测、 通信作者:王奎民.E-mail:wangkuimin2.014@163.com. 侦查、跟踪甚至水下作战。其航行环境主要包括地
第 10 卷第 2 期 智 能 系 统 学 报 Vol.10 №.2 2015 年 4 月 CAAI Transactions on Intelligent Systems Apr. 2015 DOI:10.3969 / j.issn.1673⁃4785.201503006 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.TP.20150326.1013.001.html 主要海洋环境因素对水下航行器航行影响分析 王奎民 (中国人民解放军海军驻锦州地区军事代表室,辽宁 锦州 121000) 摘 要:分析总结了水下航行器的自身结构、环境和任务的特点以及复杂海洋环境对航行器的安全造成的威胁。 从 海流干扰、海水透明度、跃层及海洋内波等水文环境要素的形成原理及其对航行器的影响等方面,分别总结了各主 要海洋环境因素对水下航行器航行状态的有利与不利影响,同时避免各要素直接或间接造成的各种不利影响的方 法,结合航行器自身的结构特点和任务需求,充分利用海洋环境因素,可以使航行器在安全性、经济性、操纵性以及 作战能力等方面有较大的增强和改善。 提出根据不同任务对海洋环境因素做威胁权值评估,并根据其威胁度,在自 主航路规划过程中适当修订航线。 通过仿真验证了该方法对航路准确定和安全性的提高。 关键词:水文环境;水下航行器;海流干扰;海水透明度;跃层;海洋内波 中图分类号:TP391 文献标志码:A 文章编号:1673⁃4785(2015)02⁃0316⁃07 中文引用格式:王奎民.主要海洋环境因素对水下航行器航行影响分析[J]. 智能系统学报, 2015, 10(2): 316⁃323. 英文引用格式:WANG Kuimin.Influence of main ocean environments on the navigation of underwater vehicles[J]. CAAI Transac⁃ tions on Intelligent Systems, 2015, 10(2): 316⁃323. Influence of main ocean environments on the navigation of underwater vehicles WANG Kuimin (Navy Military Representative Office in Jinzhou, Jinzhou 121000, China) Abstract:This paper analyzes the characteristics of underwater vehicle's configuration, environment and missions, and the menace of complex ocean environment. The advantage and disadvantage of the main ocean environmental factors to the navigation states of underwater vehicles, as well as the methods for avoiding all kinds of disadvanta⁃ geous influences caused by all kinds of factors are concluded. The main areas consist of current disturbance, seawa⁃ ter transparency, thermal layer and ocean internal wave. The vehicle enhancement and improvement in the perform⁃ ance of security, economy, maneuverability and operational performance can occur by combining the configuration characteristic of underwater vehicle and the mission requirements. This paper proposes to assess the threat weight of the ocean environmental factors according to different missions based on the degree of threat and underwater vehicle modified route in its autonomous sailing. Finally, the simulation proved that the method increases the accuracy and safety of its route. Keywords:hydrological environment; underwater vehicle; current disturbance; seawater transparency; thermal layer; ocean internal wave 收稿日期:2015⁃03⁃04. 网络出版日期:2015⁃03⁃26. 基金项目:国家自然科学基金资助项目(51179038). 通信作者:王奎民. E⁃mail:wangkuimin2014@ 163.com. 海洋占据地球 70%的面积并且蕴含着丰富的 生物资源、海洋矿物资源等。 因此,对海洋的民用甚 至军事上的利用成为各种争夺的焦点。 水下航行器 作为勘测和开发海洋资源最有效的工具被各国重 视。 水下航行器以其水下隐蔽航行作战、灵活机动 以及极强的水下攻击力而著称,经常被应用在探测、 侦查、跟踪甚至水下作战。 其航行环境主要包括地

第2期 王奎民:主要海洋环境因素对水下航行器航行影响分析 .317. 理环境和水文环境。其中,地理环境主要指海底地 舵对航行器航行运动所产生的力和力矩是很复 形、障碍物等,构成了水下航行器航行的下边界;水 杂的,通常情况下水下航行器的舵作用力,只考虑舵 文环境包括海流、潮流、潮汐、内波、跃层、透明度、海 产生的阻力、力矩和升力。同时忽略他们之间的耦 水温度、海水密度、盐度、声速等,它们会影响水下航 合作用影响。舵的模型可以描述为 行器的航行安全和隐蔽性。众所周知,安全性是水 0 X86.X88.O Xs. 0 X 0 下航行器执行任务的基础,隐蔽性是对水下航行器 0 0 0 0 Y 0 Ya 8 执行任务的基本要求。而海洋中影响水下航行器安 Z 0 0 0 0 Zs. 0 全性、隐蔽性的要素众多,如果不考虑这些要素,轻 62 K 0 0 0 0 0 则会使水下航行器偏离航线、延长任务执行时间:重 N 0 则使水下航行器失去控制,造成重大损失)。复 M 0 0 0 0 Ms. 0 N 杂的水文环境要素不仅给水下航行器的航行作战带 0 0 0 0 0 来机遇也带来了挑战。本文以水下航行器为对象, 其中,各系数按照国际拖曳水池会议(TTC)标准。 重点探讨海流、透明度、跃层、内波等水文环境要素 推进器的模型可以描述为 对水下航行器航行安全的影响。 文章主要通过分析海流、透明度、跃层和内波等 i=a(Cr -nn) 主要海洋环境因素的成因和影响,以便在航路规划 T.=Crnn 的过程中更好地利用海洋环境有利的因素,避开或 式中:n表示螺旋桨的转速,Cra为常数,T、T。分 减少不利的因素。增强水下航行器在复杂海洋环境 别为期望与实际推力。 下的综合能力。 2各种海洋环境因素的分析 1 水下无人航行器及数学模型 2.1海流对水下航行器航行的影响 本文以典型的流线型水下无人航行器作为研究 海流亦称洋流,是指海洋中海水以相对稳定的 对象,AUV的主体为回转体。其中,执行机构包含 速度,沿一定的方向做大规模的非周期性运动。其 水平舵、方向舵、主推以及辅推等。 可以分为风海流、涡流、潮汐流、表层流及深层流等 因航行器在水中通过海水与舵角的作用力矩进 不同形式,其流动方向有水平方向,也有垂直方向。 行各种运动,所以复杂的海洋环境对海水与执行机 一般海流的大小和方向都是随季节的变化而不同, 构之间的作用产生复杂的非线性变化。对航行器的 随温度、盐度的升降而异。海流是水下航行器在水 安全形势起到很不利的影响。建立船体坐标系及固 下执行任务过程中最大的影响因素,因为海流的广 定坐标系如图1所示。 泛存在并且局部地区的海流不确定性,对航行器的 影响非常巨大。从自主控制角度来看,充分利用结 合海流的方向、流速、作用在航行器上的力和力矩, 将这些因素作为自主规划的约束条件是航行器自主 化水平的一个标准。从运动控制角度来看,海流作 为扰动项,是必须在运动过程中消除的因素。所以 通过对海流的建模实现在控制过程中利用或者抵消 图1船体坐标系及固定坐标系 海流的干扰是非常重要的智能方法。 Fig.1 Body coordinate and fixed coordinate systems 海流的数学模型可以简单描述为 水下航行器的数学简化模型为 u话=U.cosa+na (Mi+C(v)v+D(v)v+8()+80=T+Ta u。=U.sina+n n=J(n)v 式中:M、C(v)、D(v)分别表示惯性矩阵、科罗拉力 矩阵以及阻尼矩阵。?、T:分别为舵角产生的力力矩 u。7 以及海洋环境扰动产生的力和力矩。 ÷T-1 为了仿真的需要,建立水下航行器的执行机构 的数学模型。 目前对海流建模主要以定常流为主。在一个方
理环境和水文环境。 其中,地理环境主要指海底地 形、障碍物等,构成了水下航行器航行的下边界;水 文环境包括海流、潮流、潮汐、内波、跃层、透明度、海 水温度、海水密度、盐度、声速等,它们会影响水下航 行器的航行安全和隐蔽性。 众所周知,安全性是水 下航行器执行任务的基础,隐蔽性是对水下航行器 执行任务的基本要求。 而海洋中影响水下航行器安 全性、隐蔽性的要素众多,如果不考虑这些要素,轻 则会使水下航行器偏离航线、延长任务执行时间;重 则使水下航行器失去控制,造成重大损失[1⁃3] 。 复 杂的水文环境要素不仅给水下航行器的航行作战带 来机遇也带来了挑战。 本文以水下航行器为对象, 重点探讨海流、透明度、跃层、内波等水文环境要素 对水下航行器航行安全的影响。 文章主要通过分析海流、透明度、跃层和内波等 主要海洋环境因素的成因和影响,以便在航路规划 的过程中更好地利用海洋环境有利的因素,避开或 减少不利的因素。 增强水下航行器在复杂海洋环境 下的综合能力。 1 水下无人航行器及数学模型 本文以典型的流线型水下无人航行器作为研究 对象,AUV 的主体为回转体。 其中,执行机构包含 水平舵、方向舵、主推以及辅推等。 因航行器在水中通过海水与舵角的作用力矩进 行各种运动,所以复杂的海洋环境对海水与执行机 构之间的作用产生复杂的非线性变化。 对航行器的 安全形势起到很不利的影响。 建立船体坐标系及固 定坐标系如图 1 所示。 图 1 船体坐标系及固定坐标系 Fig.1 Body coordinate and fixed coordinate systems 水下航行器的数学简化模型为 Mv · + C(v)v + D(v)v + g(η) + g0 = τ + τd η · = J(η)v { 式中: M、C(v)、D(v) 分别表示惯性矩阵、科罗拉力 矩阵以及阻尼矩阵。 τ、τd 分别为舵角产生的力力矩 以及海洋环境扰动产生的力和力矩。 为了仿真的需要,建立水下航行器的执行机构 的数学模型。 舵对航行器航行运动所产生的力和力矩是很复 杂的,通常情况下水下航行器的舵作用力,只考虑舵 产生的阻力、力矩和升力。 同时忽略他们之间的耦 合作用影响。 舵的模型可以描述为 X Y Z K M N é ë ê ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú ú = 0 Xδs δs Xδr δr 0 Xδs 0 0 0 0 0 0 Yδr 0 0 0 0 Zδs 0 0 0 0 0 0 Kδr 0 0 0 0 Mδs 0 0 0 0 0 0 Nδr é ë ê ê ê ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú ú ú ú · 0 δ 2 s δ 2 r 0 δs δr é ë ê ê ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú ú ú 其中,各系数按照国际拖曳水池会议(ITTC)标准。 推进器的模型可以描述为 n · = a( Td CT - n n ) Ta = CT n n ì î í ï ï ïï 式中: n 表示螺旋桨的转速, CT 、a 为常数, Td 、Ta 分 别为期望与实际推力。 2 各种海洋环境因素的分析 2.1 海流对水下航行器航行的影响 海流亦称洋流,是指海洋中海水以相对稳定的 速度,沿一定的方向做大规模的非周期性运动。 其 可以分为风海流、涡流、潮汐流、表层流及深层流等 不同形式,其流动方向有水平方向,也有垂直方向。 一般海流的大小和方向都是随季节的变化而不同, 随温度、盐度的升降而异。 海流是水下航行器在水 下执行任务过程中最大的影响因素,因为海流的广 泛存在并且局部地区的海流不确定性,对航行器的 影响非常巨大。 从自主控制角度来看,充分利用结 合海流的方向、流速、作用在航行器上的力和力矩, 将这些因素作为自主规划的约束条件是航行器自主 化水平的一个标准。 从运动控制角度来看,海流作 为扰动项,是必须在运动过程中消除的因素。 所以 通过对海流的建模实现在控制过程中利用或者抵消 海流的干扰是非常重要的智能方法。 海流的数学模型可以简单描述为 u E cx = Uc cos α + ηcx u E cy = Uc sin α + ηcy u E cz = ηcz uc vc wc é ë ê ê ê ê ù û ú ú ú ú = T -1 u E cx u E cy u E cz é ë ê ê ê ê ù û ú ú ú ú ì î í ï ï ï ï ï ï ï ï ïï 目前对海流建模主要以定常流为主。 在一个方 第 2 期 王奎民:主要海洋环境因素对水下航行器航行影响分析 ·317·
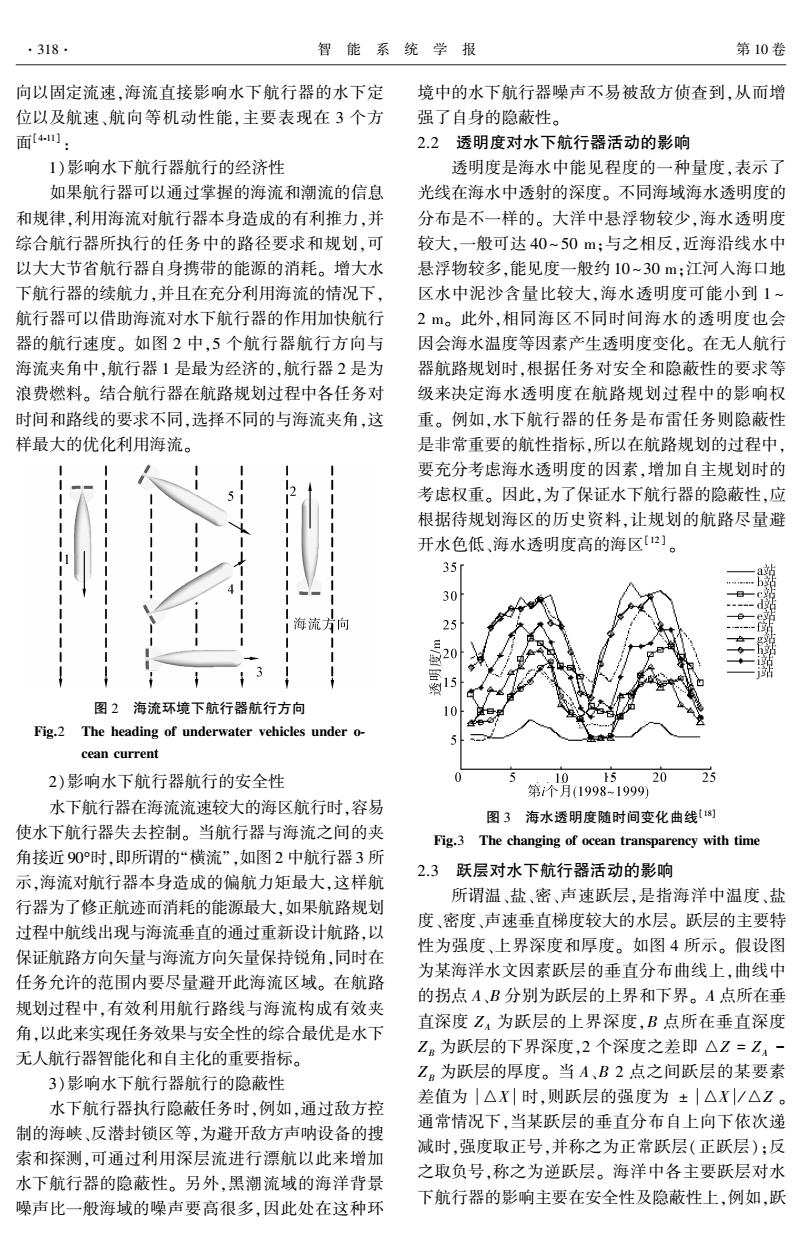
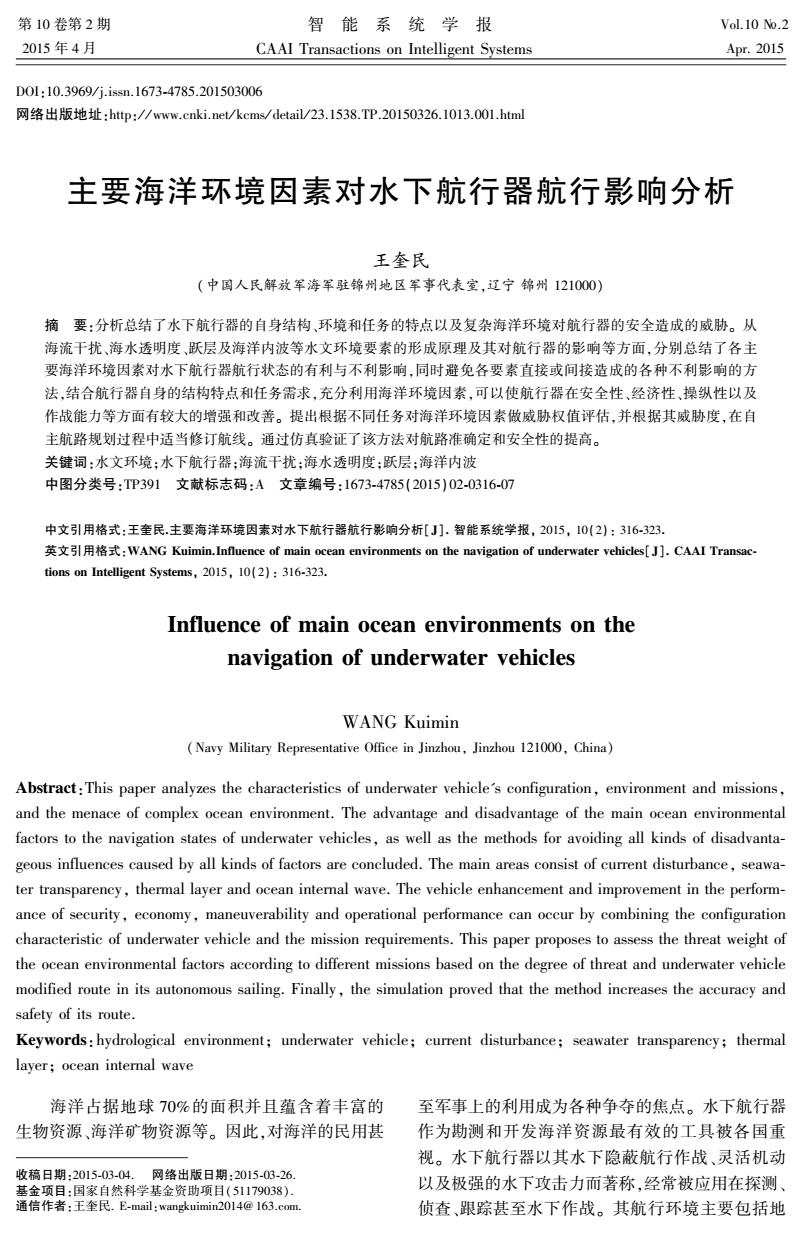
·318· 智能系统学报 第10卷 向以固定流速,海流直接影响水下航行器的水下定 境中的水下航行器噪声不易被敌方侦查到,从而增 位以及航速、航向等机动性能,主要表现在3个方 强了自身的隐蔽性。 面[4 2.2透明度对水下航行器活动的影响 1)影响水下航行器航行的经济性 透明度是海水中能见程度的一种量度,表示了 如果航行器可以通过掌握的海流和潮流的信息 光线在海水中透射的深度。不同海域海水透明度的 和规律,利用海流对航行器本身造成的有利推力,并 分布是不一样的。大洋中悬浮物较少,海水透明度 综合航行器所执行的任务中的路径要求和规划,可 较大,一般可达40~50m:与之相反,近海沿线水中 以大大节省航行器自身携带的能源的消耗。增大水 悬浮物较多,能见度一般约10~30m:江河入海口地 下航行器的续航力,并且在充分利用海流的情况下, 区水中泥沙含量比较大,海水透明度可能小到1~ 航行器可以借助海流对水下航行器的作用加快航行 2m。此外,相同海区不同时间海水的透明度也会 器的航行速度。如图2中,5个航行器航行方向与 因会海水温度等因素产生透明度变化。在无人航行 海流夹角中,航行器1是最为经济的,航行器2是为 器航路规划时,根据任务对安全和隐蔽性的要求等 浪费燃料。结合航行器在航路规划过程中各任务对 级来决定海水透明度在航路规划过程中的影响权 时间和路线的要求不同,选择不同的与海流夹角,这 重。例如,水下航行器的任务是布雷任务则隐蔽性 样最大的优化利用海流。 是非常重要的航性指标,所以在航路规划的过程中, 要充分考虑海水透明度的因素,增加自主规划时的 考虑权重。因此,为了保证水下航行器的隐蔽性,应 根据待规划海区的历史资料,让规划的航路尽量避 开水色低、海水透明度高的海区[2]。 11 35i 1 30 1海流方向 25 站 3 屬 图2海流环境下航行器航行方向 Fig.2 The heading of underwater vehicles under o- cean current 2)影响水下航行器航行的安全性 101520 25 第个月(1998-1999) 水下航行器在海流流速较大的海区航行时,容易 图3海水透明度随时间变化曲线剧 使水下航行器失去控制。当航行器与海流之间的夹 Fig.3 The changing of ocean transparency with time 角接近90时,即所谓的“横流”,如图2中航行器3所 2.3跃层对水下航行器活动的影响 示,海流对航行器本身造成的偏航力矩最大,这样航 所谓温、盐、密、声速跃层,是指海洋中温度、盐 行器为了修正航迹而消耗的能源最大,如果航路规划 度、密度、声速垂直梯度较大的水层。跃层的主要特 过程中航线出现与海流垂直的通过重新设计航路,以 性为强度、上界深度和厚度。如图4所示。假设图 保证航路方向矢量与海流方向矢量保持锐角,同时在 为某海洋水文因素跃层的垂直分布曲线上,曲线中 任务允许的范围内要尽量避开此海流区域。在航路 的拐点A、B分别为跃层的上界和下界。A点所在垂 规划过程中,有效利用航行路线与海流构成有效夹 直深度Z,为跃层的上界深度,B点所在垂直深度 角,以此来实现任务效果与安全性的综合最优是水下 无人航行器智能化和自主化的重要指标。 Z。为跃层的下界深度,2个深度之差即△Z=Z:- 3)影响水下航行器航行的隐蔽性 Zg为跃层的厚度。当A、B2点之间跃层的某要素 水下航行器执行隐蔽任务时,例如,通过敌方控 差值为|△X|时,则跃层的强度为±|△X/△Z。 通常情况下,当某跃层的垂直分布自上向下依次递 制的海峡、反潜封锁区等,为避开敌方声呐设备的搜 减时,强度取正号,并称之为正常跃层(正跃层):反 索和探测,可通过利用深层流进行漂航以此来增加 之取负号,称之为逆跃层。海洋中各主要跃层对水 水下航行器的隐蔽性。另外,黑潮流域的海洋背景 下航行器的影响主要在安全性及隐蔽性上,例如,跃 噪声比一般海域的噪声要高很多,因此处在这种环
向以固定流速,海流直接影响水下航行器的水下定 位以及航速、航向等机动性能,主要表现在 3 个方 面[4⁃11] : 1)影响水下航行器航行的经济性 如果航行器可以通过掌握的海流和潮流的信息 和规律,利用海流对航行器本身造成的有利推力,并 综合航行器所执行的任务中的路径要求和规划,可 以大大节省航行器自身携带的能源的消耗。 增大水 下航行器的续航力,并且在充分利用海流的情况下, 航行器可以借助海流对水下航行器的作用加快航行 器的航行速度。 如图 2 中,5 个航行器航行方向与 海流夹角中,航行器 1 是最为经济的,航行器 2 是为 浪费燃料。 结合航行器在航路规划过程中各任务对 时间和路线的要求不同,选择不同的与海流夹角,这 样最大的优化利用海流。 图 2 海流环境下航行器航行方向 Fig.2 The heading of underwater vehicles under o⁃ cean current 2)影响水下航行器航行的安全性 水下航行器在海流流速较大的海区航行时,容易 使水下航行器失去控制。 当航行器与海流之间的夹 角接近 90°时,即所谓的“横流”,如图 2 中航行器 3 所 示,海流对航行器本身造成的偏航力矩最大,这样航 行器为了修正航迹而消耗的能源最大,如果航路规划 过程中航线出现与海流垂直的通过重新设计航路,以 保证航路方向矢量与海流方向矢量保持锐角,同时在 任务允许的范围内要尽量避开此海流区域。 在航路 规划过程中,有效利用航行路线与海流构成有效夹 角,以此来实现任务效果与安全性的综合最优是水下 无人航行器智能化和自主化的重要指标。 3)影响水下航行器航行的隐蔽性 水下航行器执行隐蔽任务时,例如,通过敌方控 制的海峡、反潜封锁区等,为避开敌方声呐设备的搜 索和探测,可通过利用深层流进行漂航以此来增加 水下航行器的隐蔽性。 另外,黑潮流域的海洋背景 噪声比一般海域的噪声要高很多,因此处在这种环 境中的水下航行器噪声不易被敌方侦查到,从而增 强了自身的隐蔽性。 2.2 透明度对水下航行器活动的影响 透明度是海水中能见程度的一种量度,表示了 光线在海水中透射的深度。 不同海域海水透明度的 分布是不一样的。 大洋中悬浮物较少,海水透明度 较大,一般可达 40 ~ 50 m;与之相反,近海沿线水中 悬浮物较多,能见度一般约 10~30 m;江河入海口地 区水中泥沙含量比较大,海水透明度可能小到 1 ~ 2 m。 此外,相同海区不同时间海水的透明度也会 因会海水温度等因素产生透明度变化。 在无人航行 器航路规划时,根据任务对安全和隐蔽性的要求等 级来决定海水透明度在航路规划过程中的影响权 重。 例如,水下航行器的任务是布雷任务则隐蔽性 是非常重要的航性指标,所以在航路规划的过程中, 要充分考虑海水透明度的因素,增加自主规划时的 考虑权重。 因此,为了保证水下航行器的隐蔽性,应 根据待规划海区的历史资料,让规划的航路尽量避 开水色低、海水透明度高的海区[12 ] 。 图 3 海水透明度随时间变化曲线[18] Fig.3 The changing of ocean transparency with time 2.3 跃层对水下航行器活动的影响 所谓温、盐、密、声速跃层,是指海洋中温度、盐 度、密度、声速垂直梯度较大的水层。 跃层的主要特 性为强度、上界深度和厚度。 如图 4 所示。 假设图 为某海洋水文因素跃层的垂直分布曲线上,曲线中 的拐点 A、B 分别为跃层的上界和下界。 A 点所在垂 直深度 ZA 为跃层的上界深度,B 点所在垂直深度 ZB 为跃层的下界深度,2 个深度之差即 △Z = ZA - ZB 为跃层的厚度。 当 A、B 2 点之间跃层的某要素 差值为 △X 时,则跃层的强度为 ± △X / △Z 。 通常情况下,当某跃层的垂直分布自上向下依次递 减时,强度取正号,并称之为正常跃层(正跃层);反 之取负号,称之为逆跃层。 海洋中各主要跃层对水 下航行器的影响主要在安全性及隐蔽性上,例如,跃 ·318· 智 能 系 统 学 报 第 10 卷
第2期 王奎民:主要海洋环境因素对水下航行器航行影响分析 ·319. 层可能会突然造成浮力的改变或者改变航行器的水 下声速跃层是由温度、盐度、压强的不均匀造成的。 声特性。可充分利用跃层对水声特性的干扰增加水 声速跃层的存在会使以声纳为代表的水声探测设备 下航行器的隐蔽性,同时避免因浮力的改变造成触 出现探测盲区而无法工作,对水下航行器之间的通信 底或者推出水面。这样在水下航行器航执行以安全 和对敌探测有非常明显的影响。 性和隐蔽性为目的的任务时,海洋跃层因素作为航 在声速跃层的区域里,声速梯度的传播方向在 路规划时考虑的重要参考因素。 深声道的上下层中是相反的。在深声道的上层,声 海洋跃层将影响其附近海域的温度、盐度、密 波的传播将向深声道的方向发生偏移,使得声波无 度、声速等性质的循环,在海水的垂直面上,其严重 法直接穿越声速跃层,在该区域发射的声纳信号不 影响温度、盐都、密度、声速等海洋要素的性质的变 易探测到跃层之下的目标,也就是说潜入跃层以下 化规律。这样海洋跃层就使得上下两边的海水各主 的水下航行器被发现的可能性大为减小,增强其隐 要要素的性质有很大的不同。研究海水跃层的变化 蔽性。在深声道区域,声波信号的声强较大,可以传 规律,对水下航行器活动、水声探测和水下通信等均 播到很远的距离,水声设备在该区域的使用效果较 有重要意义]。 好。因此,航行在深声道中的水下航行器将可以探 测到距离很远的目标,增强了探测能力。另一方面, 通过利用水声跃层对水声探测信号的影响,水下航 行器可以根据自身的不同任务要求利用周边的水文 环境增加自身的隐蔽性或者增加自身携带的水声感 知设备的探测能力。因为声波在复杂水文环境下发 生特殊变化是随着区域变化而有很大不同,所以水 图4跃层示意图 下航行器在执行任务时需要结合自身任务的需求, Fig.4 Sketch of thermal layer 选择路线需要经过的最有利区域。 2.3.1密度跃层对航行器的影响 2.3.3温度跃层对航行器的影响 密度跃层的远近对内波载荷的大小有较大的影 温度跃层为水温垂直变化较快的水层,可分为 响,荷载会随着跃层的远近发生变化。离跃层越近 2类:1)主温跃层,也成为永久温跃层,该温度跃层 所受荷载越大,相反,荷载越小。最大内波荷载与静 常年位于较深的大洋中,且随季节变化较小:2)季 水压力大小处于同一数量级,所以该影响不得不着 节性温跃层,该温度跃层一般位于临近大陆的边缘 重考虑。但是同一深度下内波荷载沿着水下航行器 海,从春季产生加强,到夏季达到最强,秋季又开始 经纬两方向的变化趋势大体相同。 减弱,冬季消失11。温度跃层影响水声的传播,如 密度跃层对水下航行器活动影响很大。当密度 图5和图6所示,对声呐探测水下目标概率影响很 跃层上方海水的密度小而跃层下方的海水密度大 大。所以有利于水下航行器的隐蔽性。熟悉并利用 时,海水的密度差就会导致海水产生对水下航行器 温度跃层可以有效的躲避敌人的探测和侦查。 的浮力急剧减小的作用,俗称“海中断崖”。它会使 与水声跃层相似,对水声的正反两面干扰,可以 进入此区域中的水下航行器突然因浮力不足而急速 根据水下航行器任务的不同充分利用其特性。温跃 下沉,当密度跃层上方海水的密度大而跃层下方海 层中水声变化的相关参数对水下航行器的隐蔽性、 水的密度小时,这时的海水密度差就会与前面相反, 搭载水下武器、航路规划等方面都是至关重要的。 产生对水下航行器的浮力突然变大的作用,俗称 2.4内波对水下航行器活动的影响 “液体海底”。这2种因密度跃层造成的现象严重 内波是一种因海水运动而产生的海洋要素,它 威胁到水下航行器的航行安全。 是因为海洋内部的海水密度不同,造成不同密度之 2.3.2声速跃层对航行器的影响 间的水层之间产生一种自发的波动。内波对声速的 目前主要的海洋探测都是以声音作为主要媒介。 影响如图7所示。内波的存在像海面的波浪一样普 所以声速是一个非常重要的水文环境要素,它同时决 遍。只要海水稳定的分成不同的密度层,同时再有 定着声的传播路线以及所有其他的声学现象。声速 扰动源的存在,内波就会随之产生。它导致等密度 在传播时会向速度更慢一侧发生折射。因海洋海水 面的波动,使声速的大小和方向发生改变,内波对声 的自身物理特性的分布情况所决定,可以使声音传播 呐设备的影响极大,充分利用内波有利于水下航行 速度造成较大变化的区域叫声速跃层小。通常情况 器在水下的隐蔽
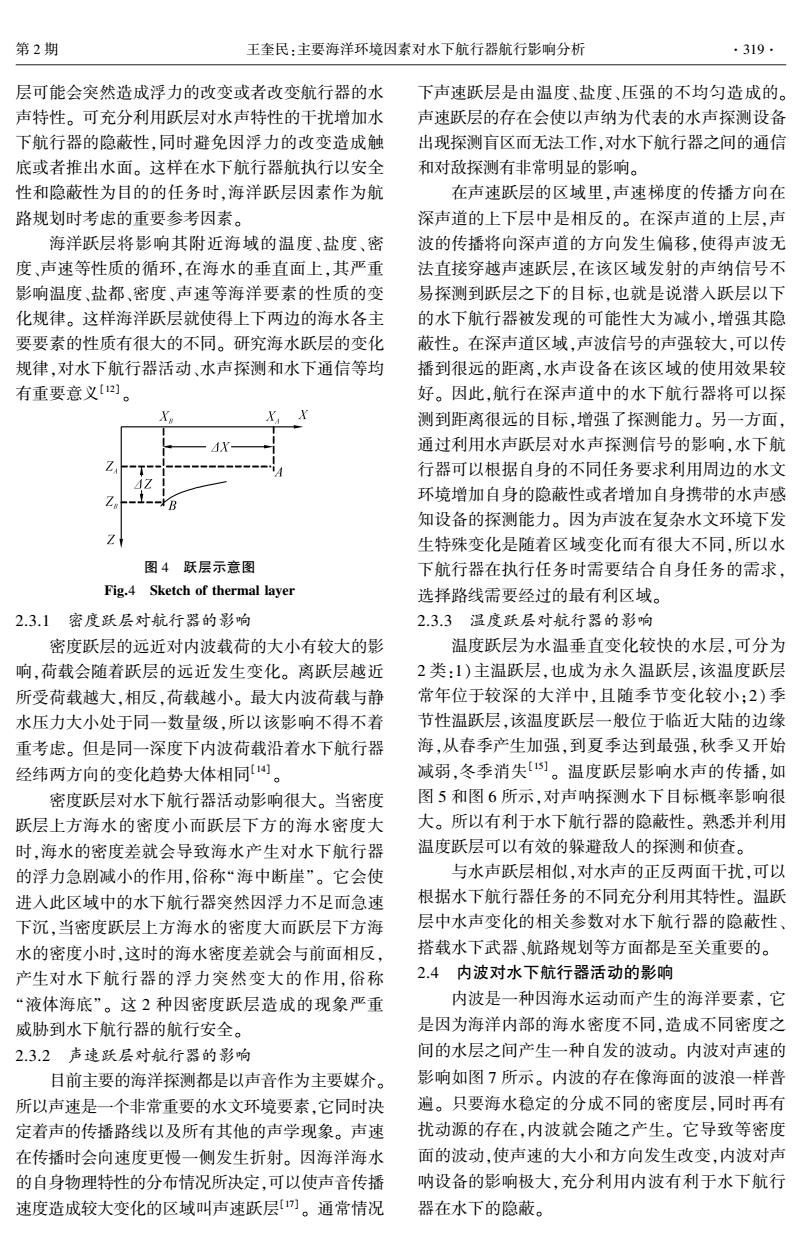
层可能会突然造成浮力的改变或者改变航行器的水 声特性。 可充分利用跃层对水声特性的干扰增加水 下航行器的隐蔽性,同时避免因浮力的改变造成触 底或者推出水面。 这样在水下航行器航执行以安全 性和隐蔽性为目的的任务时,海洋跃层因素作为航 路规划时考虑的重要参考因素。 海洋跃层将影响其附近海域的温度、盐度、密 度、声速等性质的循环,在海水的垂直面上,其严重 影响温度、盐都、密度、声速等海洋要素的性质的变 化规律。 这样海洋跃层就使得上下两边的海水各主 要要素的性质有很大的不同。 研究海水跃层的变化 规律,对水下航行器活动、水声探测和水下通信等均 有重要意义[12] 。 图 4 跃层示意图 Fig.4 Sketch of thermal layer 2.3.1 密度跃层对航行器的影响 密度跃层的远近对内波载荷的大小有较大的影 响,荷载会随着跃层的远近发生变化。 离跃层越近 所受荷载越大,相反,荷载越小。 最大内波荷载与静 水压力大小处于同一数量级,所以该影响不得不着 重考虑。 但是同一深度下内波荷载沿着水下航行器 经纬两方向的变化趋势大体相同[14] 。 密度跃层对水下航行器活动影响很大。 当密度 跃层上方海水的密度小而跃层下方的海水密度大 时,海水的密度差就会导致海水产生对水下航行器 的浮力急剧减小的作用,俗称“海中断崖”。 它会使 进入此区域中的水下航行器突然因浮力不足而急速 下沉,当密度跃层上方海水的密度大而跃层下方海 水的密度小时,这时的海水密度差就会与前面相反, 产生对水下航行器的浮力突然变大的作用,俗称 “液体海底”。 这 2 种因密度跃层造成的现象严重 威胁到水下航行器的航行安全。 2.3.2 声速跃层对航行器的影响 目前主要的海洋探测都是以声音作为主要媒介。 所以声速是一个非常重要的水文环境要素,它同时决 定着声的传播路线以及所有其他的声学现象。 声速 在传播时会向速度更慢一侧发生折射。 因海洋海水 的自身物理特性的分布情况所决定,可以使声音传播 速度造成较大变化的区域叫声速跃层[17] 。 通常情况 下声速跃层是由温度、盐度、压强的不均匀造成的。 声速跃层的存在会使以声纳为代表的水声探测设备 出现探测盲区而无法工作,对水下航行器之间的通信 和对敌探测有非常明显的影响。 在声速跃层的区域里,声速梯度的传播方向在 深声道的上下层中是相反的。 在深声道的上层,声 波的传播将向深声道的方向发生偏移,使得声波无 法直接穿越声速跃层,在该区域发射的声纳信号不 易探测到跃层之下的目标,也就是说潜入跃层以下 的水下航行器被发现的可能性大为减小,增强其隐 蔽性。 在深声道区域,声波信号的声强较大,可以传 播到很远的距离,水声设备在该区域的使用效果较 好。 因此,航行在深声道中的水下航行器将可以探 测到距离很远的目标,增强了探测能力。 另一方面, 通过利用水声跃层对水声探测信号的影响,水下航 行器可以根据自身的不同任务要求利用周边的水文 环境增加自身的隐蔽性或者增加自身携带的水声感 知设备的探测能力。 因为声波在复杂水文环境下发 生特殊变化是随着区域变化而有很大不同,所以水 下航行器在执行任务时需要结合自身任务的需求, 选择路线需要经过的最有利区域。 2.3.3 温度跃层对航行器的影响 温度跃层为水温垂直变化较快的水层,可分为 2 类:1)主温跃层,也成为永久温跃层,该温度跃层 常年位于较深的大洋中,且随季节变化较小;2) 季 节性温跃层,该温度跃层一般位于临近大陆的边缘 海,从春季产生加强,到夏季达到最强,秋季又开始 减弱,冬季消失[15] 。 温度跃层影响水声的传播,如 图 5 和图 6 所示,对声呐探测水下目标概率影响很 大。 所以有利于水下航行器的隐蔽性。 熟悉并利用 温度跃层可以有效的躲避敌人的探测和侦查。 与水声跃层相似,对水声的正反两面干扰,可以 根据水下航行器任务的不同充分利用其特性。 温跃 层中水声变化的相关参数对水下航行器的隐蔽性、 搭载水下武器、航路规划等方面都是至关重要的。 2.4 内波对水下航行器活动的影响 内波是一种因海水运动而产生的海洋要素, 它 是因为海洋内部的海水密度不同,造成不同密度之 间的水层之间产生一种自发的波动。 内波对声速的 影响如图 7 所示。 内波的存在像海面的波浪一样普 遍。 只要海水稳定的分成不同的密度层,同时再有 扰动源的存在,内波就会随之产生。 它导致等密度 面的波动,使声速的大小和方向发生改变,内波对声 呐设备的影响极大,充分利用内波有利于水下航行 器在水下的隐蔽。 第 2 期 王奎民:主要海洋环境因素对水下航行器航行影响分析 ·319·
·320· 智能系统学报 第10卷 21 2 2.0 x=231.22 1.6 84.97 22 22 x=138.73 1.2 x=92.49 42 x=46.24 52 52 0.4 62 62 141516171819 1495150515151525 02 温度/C 声速/(ms) 4680121416182610 z/m (a)断面起点温度刨面 (b)断面起点声速刨面 图7内波影响下不同位置的扰动声速创面(例 6 2 Fig.7 The velocity planning surface with influence of 16 12 internal waves at different positions 三26 1)内波对水下航行器的不利影响 36 的 46 的 内波是海洋中的一大隐患,对水下航行器航行 42 有着较大的影响。尺度较小的内波会使航行其上的 56 52 水下航行器产生颠簸,易对航行器壳体及其附属结 66 62 171819202122 151415221530 构造成损失。内波荷载作用在水下航行器表面上的 温度/°C 声速/ms) (c)断面终点温度刨面 (d)断面终点声速刨面 压力是不均匀的,极端场合下,巨大的内波甚至可以 图5春季声速随温跃层的变化6 把水下航行器托出水面或拽下海底。水下航行器在 Fig.5 The velocity changing with the thermocline var- 执行任务时,应尽量避免将规划的航路经过此区域。 ying in spring 2)内波对水下航行器的有利影响 内波中的高频随机内波对水下航行器航行隐蔽 9.5m 性有着一定的帮助。内波使声速的方向和大小都发 生脉动,因而影响着声呐设备的探索侦查能力,故有 18 18 利于水下航行器的隐蔽而使敌方的监听遇到困难。 高频随机内波在波动的过程中会产生较大的噪声。 28 32.5m 28 1514.6(30) 因此在该海域活动的水下航行器,其发动机等噪声 其 录 会因高频随机内波的存在在内波区域内传递时快速 38 38 405m 衰减,甚至水下航行器自身的噪声可以完全被内波 40.5m 48L 48LZ 的噪声完全掩盖住,从而增加了水下航行器的隐蔽 202224262830 518152815381548 温度/(C) 声速/(ms) 航行]。在水下航行器执行隐蔽侦查任务时,可以 (a)断面起点温度刨面 (b)断面起点声速刨面 通过利用这种内波区域降低了水声侦测被发现的概 15 15 1514.4(24) 率,增加了水下航行器的隐蔽性以及安全性。 31.5m 31.5m 三35 三35 3 水下航行器对水文要素的利用与躲 避 55 晨55 在海洋环境下,水文环境要素是水下航行器不可 64.5m 64.5m 避免的影响因素。而水下航行器在海洋执行任务的 75 75 1514.470) 过程中,航路的规划需要根据任务的目的不同,在自 上上1L 192123252729 1518152815381548 主制定航路时也要对不同的海洋水文环境因素参考 温度/(°C) 声速/(ms) 的权重也不同,如表1所示,近岸巡逻任务是在近海 (©)断面终点温度刨面 (d)面终点声速刨面 岸的水文环境下进行巡逻任务,重点强调近岸任务, 图6夏季声速随温跃层深度变化(6 并且无需考虑隐蔽性,安全性是该任务的第一要求, Fig.6 The velocity changing with the thermocline var- 近岸情况下海流比较复杂,所以可以按表中所示的权 ying in summer 重分配。又例如港口侦查,该任务以航行器的隐蔽性
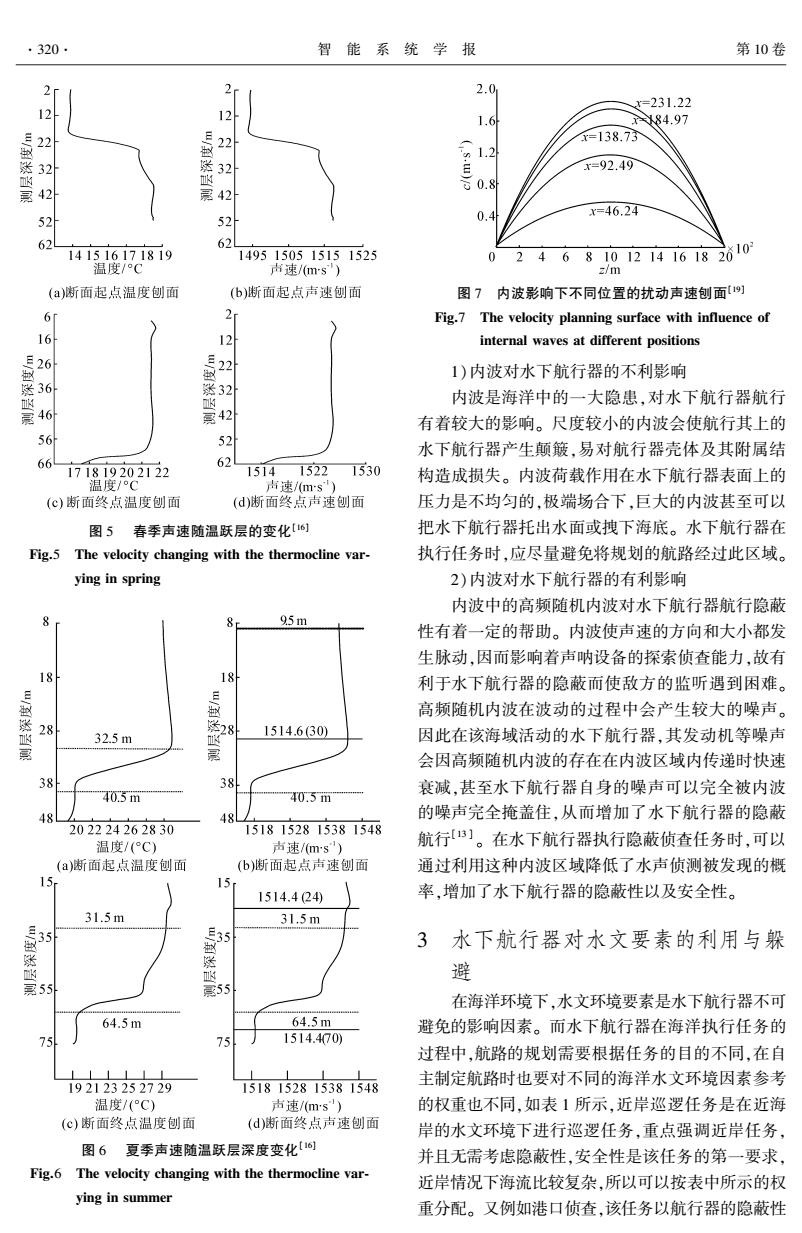
图 5 春季声速随温跃层的变化[16] Fig.5 The velocity changing with the thermocline var⁃ ying in spring 图 6 夏季声速随温跃层深度变化[16] Fig.6 The velocity changing with the thermocline var⁃ ying in summer 图 7 内波影响下不同位置的扰动声速刨面[19] Fig.7 The velocity planning surface with influence of internal waves at different positions 1)内波对水下航行器的不利影响 内波是海洋中的一大隐患,对水下航行器航行 有着较大的影响。 尺度较小的内波会使航行其上的 水下航行器产生颠簸,易对航行器壳体及其附属结 构造成损失。 内波荷载作用在水下航行器表面上的 压力是不均匀的,极端场合下,巨大的内波甚至可以 把水下航行器托出水面或拽下海底。 水下航行器在 执行任务时,应尽量避免将规划的航路经过此区域。 2)内波对水下航行器的有利影响 内波中的高频随机内波对水下航行器航行隐蔽 性有着一定的帮助。 内波使声速的方向和大小都发 生脉动,因而影响着声呐设备的探索侦查能力,故有 利于水下航行器的隐蔽而使敌方的监听遇到困难。 高频随机内波在波动的过程中会产生较大的噪声。 因此在该海域活动的水下航行器,其发动机等噪声 会因高频随机内波的存在在内波区域内传递时快速 衰减,甚至水下航行器自身的噪声可以完全被内波 的噪声完全掩盖住,从而增加了水下航行器的隐蔽 航行[13 ] 。 在水下航行器执行隐蔽侦查任务时,可以 通过利用这种内波区域降低了水声侦测被发现的概 率,增加了水下航行器的隐蔽性以及安全性。 3 水下航行器对水文要素的利用与躲 避 在海洋环境下,水文环境要素是水下航行器不可 避免的影响因素。 而水下航行器在海洋执行任务的 过程中,航路的规划需要根据任务的目的不同,在自 主制定航路时也要对不同的海洋水文环境因素参考 的权重也不同,如表 1 所示,近岸巡逻任务是在近海 岸的水文环境下进行巡逻任务,重点强调近岸任务, 并且无需考虑隐蔽性,安全性是该任务的第一要求, 近岸情况下海流比较复杂,所以可以按表中所示的权 重分配。 又例如港口侦查,该任务以航行器的隐蔽性 ·320· 智 能 系 统 学 报 第 10 卷