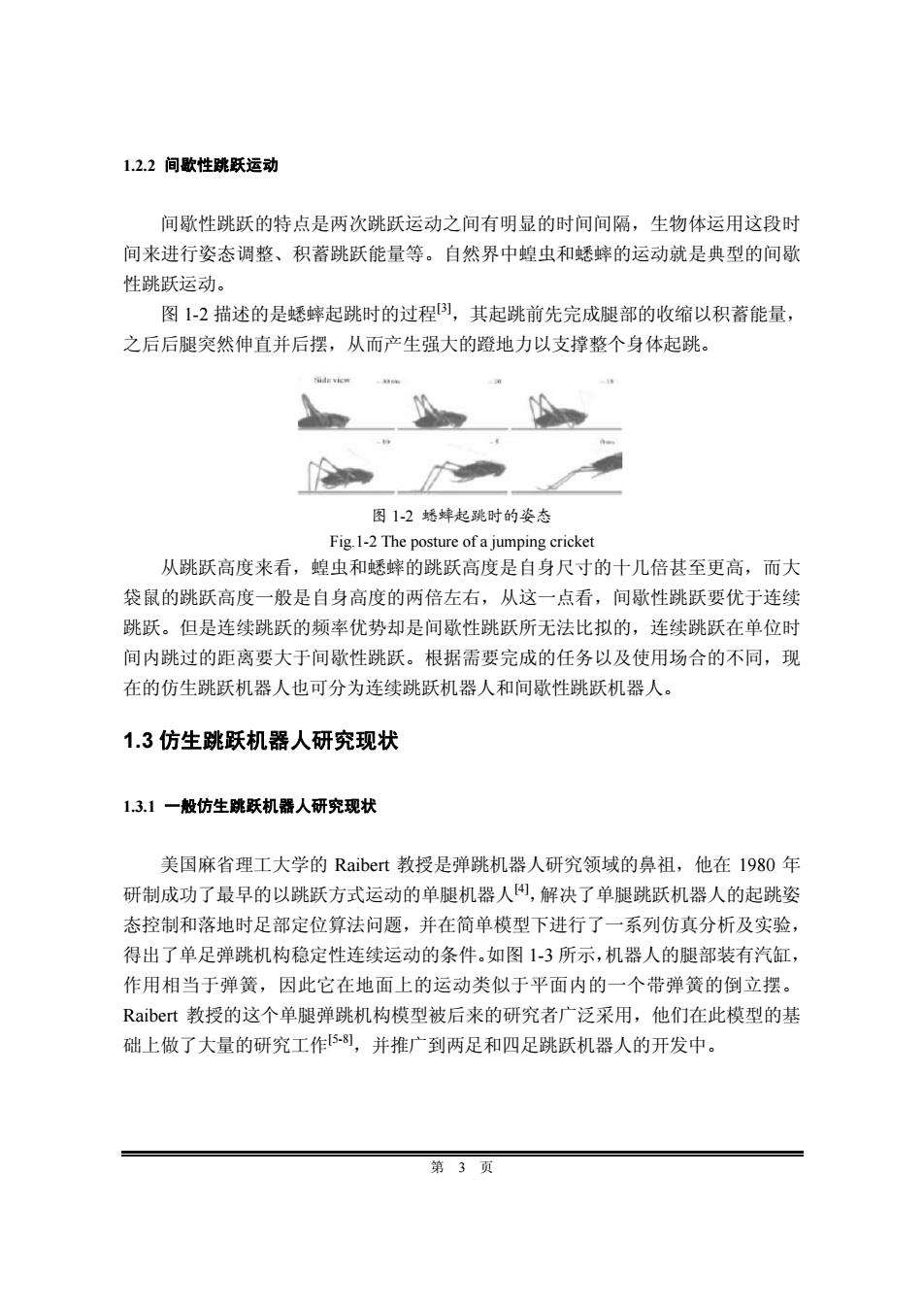
1.2.2间歇性跳跃运动 间歇性跳跃的特点是两次跳跃运动之间有明显的时间间隔,生物体运用这段时 间来进行姿态调整、积蓄跳跃能量等。自然界中蝗虫和蟋蟀的运动就是典型的间歇 性跳跃运动。 图1-2描述的是蟋蟀起跳时的过程)],其起跳前先完成腿部的收缩以积蓄能量, 之后后腿突然伸直并后摆,从而产生强大的蹬地力以支撑整个身体起跳。 图1-2蟋蟀起跳时的姿态 Fig.1-2 The posture of a jumping cricket 从跳跃高度来看,蝗虫和蟋蟀的跳跃高度是自身尺寸的十几倍甚至更高,而大 袋鼠的跳跃高度一般是自身高度的两倍左右,从这一点看,间歇性跳跃要优于连续 跳跃。但是连续跳跃的频率优势却是间歇性跳跃所无法比拟的,连续跳跃在单位时 间内跳过的距离要大于间歇性跳跃。根据需要完成的任务以及使用场合的不同,现 在的仿生跳跃机器人也可分为连续跳跃机器人和间歇性跳跃机器人。 1.3仿生跳跃机器人研究现状 13.1一般仿生跳跃机器人研究现状 美国麻省理工大学的Raibert教授是弹跳机器人研究领域的鼻祖,他在1980年 研制成功了最早的以跳跃方式运动的单腿机器人4,解决了单腿跳跃机器人的起跳姿 态控制和落地时足部定位算法问题,并在简单模型下进行了一系列仿真分析及实验, 得出了单足弹跳机构稳定性连续运动的条件。如图1-3所示,机器人的腿部装有汽缸, 作用相当于弹簧,因此它在地面上的运动类似于平面内的一个带弹簧的倒立摆。 Raibert教授的这个单腿弹跳机构模型被后来的研究者广泛采用,他们在此模型的基 础上做了大量的研究工作5-8),并推广到两足和四足跳跃机器人的开发中。 第3页
第 3 页 1.2.2 间歇性跳跃运动 间歇性跳跃的特点是两次跳跃运动之间有明显的时间间隔,生物体运用这段时 间来进行姿态调整、积蓄跳跃能量等。自然界中蝗虫和蟋蟀的运动就是典型的间歇 性跳跃运动。 图 1-2 描述的是蟋蟀起跳时的过程[3],其起跳前先完成腿部的收缩以积蓄能量, 之后后腿突然伸直并后摆,从而产生强大的蹬地力以支撑整个身体起跳。 图 1-2 蟋蟀起跳时的姿态 Fig.1-2 The posture of a jumping cricket 从跳跃高度来看,蝗虫和蟋蟀的跳跃高度是自身尺寸的十几倍甚至更高,而大 袋鼠的跳跃高度一般是自身高度的两倍左右,从这一点看,间歇性跳跃要优于连续 跳跃。但是连续跳跃的频率优势却是间歇性跳跃所无法比拟的,连续跳跃在单位时 间内跳过的距离要大于间歇性跳跃。根据需要完成的任务以及使用场合的不同,现 在的仿生跳跃机器人也可分为连续跳跃机器人和间歇性跳跃机器人。 1.3 仿生跳跃机器人研究现状 1.3.1 一般仿生跳跃机器人研究现状 美国麻省理工大学的 Raibert 教授是弹跳机器人研究领域的鼻祖,他在 1980 年 研制成功了最早的以跳跃方式运动的单腿机器人[4],解决了单腿跳跃机器人的起跳姿 态控制和落地时足部定位算法问题,并在简单模型下进行了一系列仿真分析及实验, 得出了单足弹跳机构稳定性连续运动的条件。如图 1-3 所示,机器人的腿部装有汽缸, 作用相当于弹簧,因此它在地面上的运动类似于平面内的一个带弹簧的倒立摆。 Raibert 教授的这个单腿弹跳机构模型被后来的研究者广泛采用,他们在此模型的基 础上做了大量的研究工作[5-8],并推广到两足和四足跳跃机器人的开发中
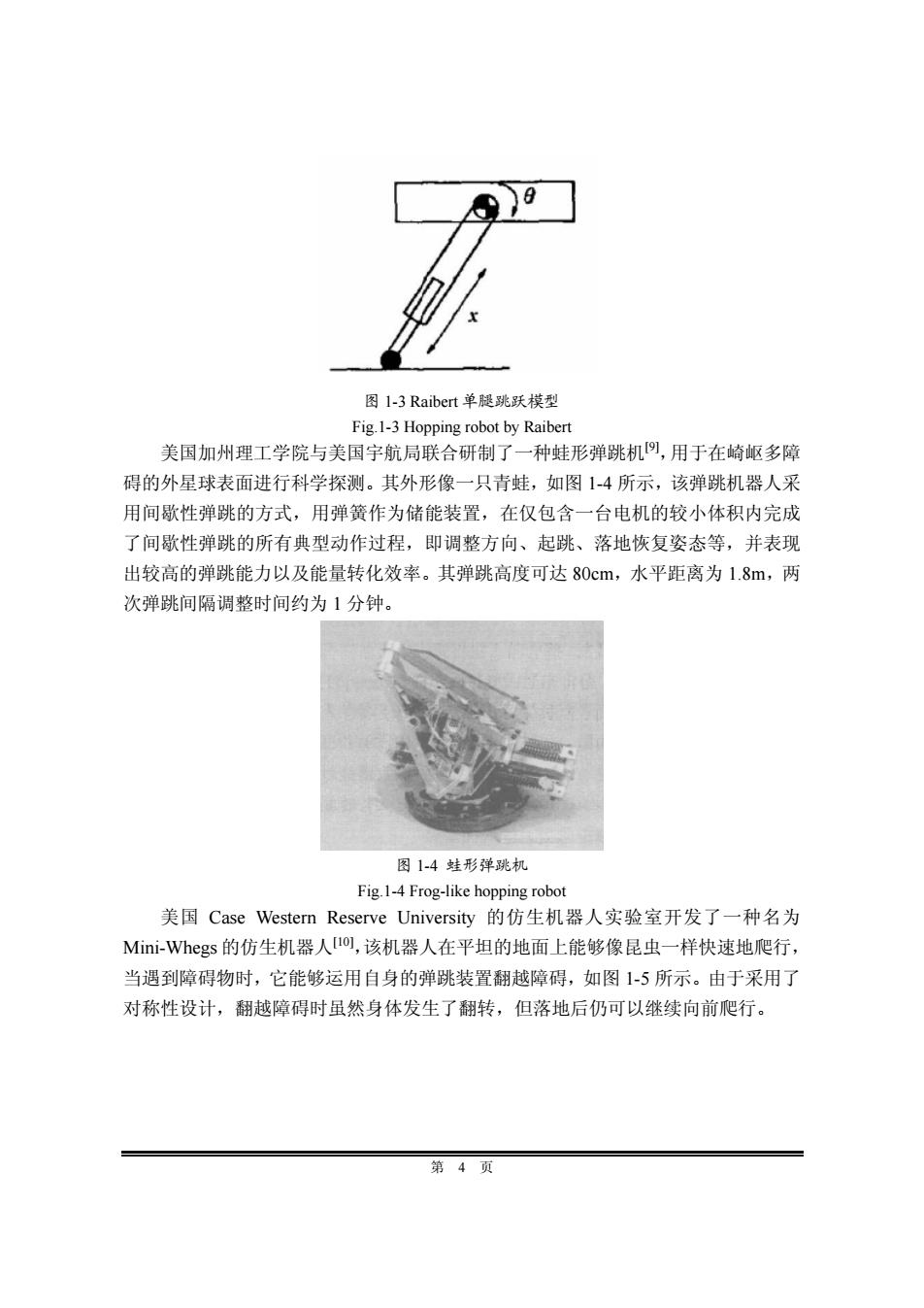
图I-3 Raibert单腿跳跃模型 Fig.1-3 Hopping robot by Raibert 美国加州理工学院与美国宇航局联合研制了一种蛙形弹跳机,用于在崎岖多障 碍的外星球表面进行科学探测。其外形像一只青蛙,如图1-4所示,该弹跳机器人采 用间歇性弹跳的方式,用弹簧作为储能装置,在仅包含一台电机的较小体积内完成 了间歇性弹跳的所有典型动作过程,即调整方向、起跳、落地恢复姿态等,并表现 出较高的弹跳能力以及能量转化效率。其弹跳高度可达80cm,水平距离为1.8m,两 次弹跳间隔调整时间约为1分钟。 图1-4蛙形弹跳机 Fig.1-4 Frog-like hopping robot 美国Case Western Reserve University的仿生机器人实验室开发了一种名为 Mini-Whegs的仿生机器人1o,该机器人在平坦的地面上能够像昆虫一样快速地爬行, 当遇到障碍物时,它能够运用自身的弹跳装置翻越障碍,如图1-5所示。由于采用了 对称性设计,翻越障碍时虽然身体发生了翻转,但落地后仍可以继续向前爬行。 第4页
第 4 页 图 1-3 Raibert 单腿跳跃模型 Fig.1-3 Hopping robot by Raibert 美国加州理工学院与美国宇航局联合研制了一种蛙形弹跳机[9],用于在崎岖多障 碍的外星球表面进行科学探测。其外形像一只青蛙,如图 1-4 所示,该弹跳机器人采 用间歇性弹跳的方式,用弹簧作为储能装置,在仅包含一台电机的较小体积内完成 了间歇性弹跳的所有典型动作过程,即调整方向、起跳、落地恢复姿态等,并表现 出较高的弹跳能力以及能量转化效率。其弹跳高度可达 80cm,水平距离为 1.8m,两 次弹跳间隔调整时间约为 1 分钟。 图 1-4 蛙形弹跳机 Fig.1-4 Frog-like hopping robot 美国 Case Western Reserve University 的仿生机器人实验室开发了一种名为 Mini-Whegs 的仿生机器人[10],该机器人在平坦的地面上能够像昆虫一样快速地爬行, 当遇到障碍物时,它能够运用自身的弹跳装置翻越障碍,如图 1-5 所示。由于采用了 对称性设计,翻越障碍时虽然身体发生了翻转,但落地后仍可以继续向前爬行
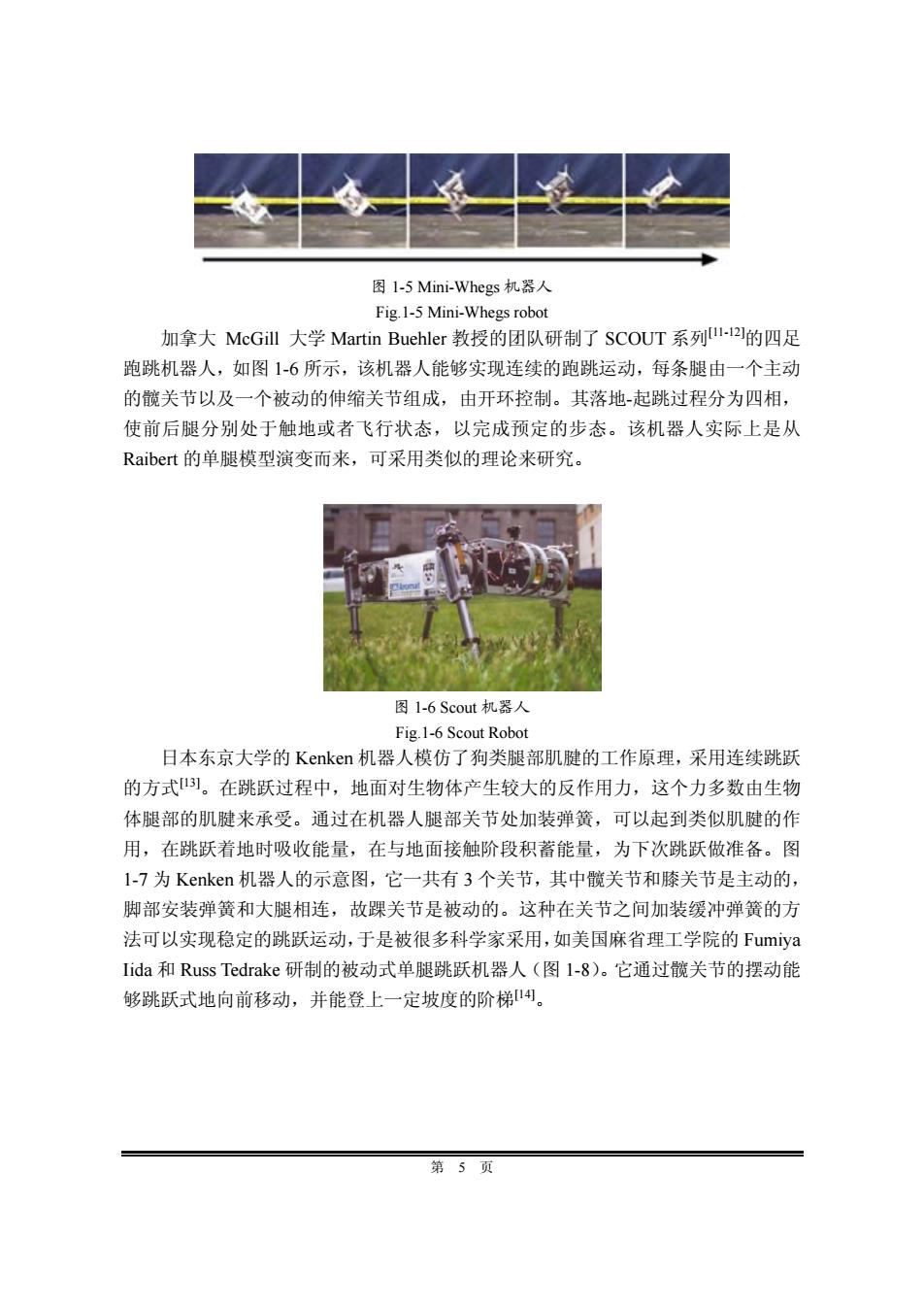
图1-5Mini-Whegs机器人 Fig.1-5 Mini-Whegs robot 加拿大McGill大学Martin Buehler教授的团队研制了SCOUT系列I-l2的四足 跑跳机器人,如图1-6所示,该机器人能够实现连续的跑跳运动,每条腿由一个主动 的髋关节以及一个被动的伸缩关节组成,由开环控制。其落地-起跳过程分为四相, 使前后腿分别处于触地或者飞行状态,以完成预定的步态。该机器人实际上是从 Raibert的单腿模型演变而来,可采用类似的理论来研究。 图1-6 Scout机器人 Fig.1-6 Scout Robot 日本东京大学的Kenken机器人模仿了狗类腿部肌腱的工作原理,采用连续跳跃 的方式。在跳跃过程中,地面对生物体产生较大的反作用力,这个力多数由生物 体腿部的肌腱来承受。通过在机器人腿部关节处加装弹簧,可以起到类似肌腱的作 用,在跳跃着地时吸收能量,在与地面接触阶段积蓄能量,为下次跳跃做准备。图 1-7为Kenken机器人的示意图,它一共有3个关节,其中髋关节和膝关节是主动的, 脚部安装弹簧和大腿相连,故踝关节是被动的。这种在关节之间加装缓冲弹簧的方 法可以实现稳定的跳跃运动,于是被很多科学家采用,如美国麻省理工学院的Fumiya Iida和Russ Tedrake研制的被动式单腿跳跃机器人(图l-8)。它通过髋关节的摆动能 够跳跃式地向前移动,并能登上一定坡度的阶梯4。 第5页
第 5 页 图 1-5 Mini-Whegs 机器人 Fig.1-5 Mini-Whegs robot 加拿大 McGill 大学 Martin Buehler 教授的团队研制了 SCOUT 系列[11-12]的四足 跑跳机器人,如图 1-6 所示,该机器人能够实现连续的跑跳运动,每条腿由一个主动 的髋关节以及一个被动的伸缩关节组成,由开环控制。其落地-起跳过程分为四相, 使前后腿分别处于触地或者飞行状态,以完成预定的步态。该机器人实际上是从 Raibert 的单腿模型演变而来,可采用类似的理论来研究。 图 1-6 Scout 机器人 Fig.1-6 Scout Robot 日本东京大学的 Kenken 机器人模仿了狗类腿部肌腱的工作原理,采用连续跳跃 的方式[13]。在跳跃过程中,地面对生物体产生较大的反作用力,这个力多数由生物 体腿部的肌腱来承受。通过在机器人腿部关节处加装弹簧,可以起到类似肌腱的作 用,在跳跃着地时吸收能量,在与地面接触阶段积蓄能量,为下次跳跃做准备。图 1-7 为 Kenken 机器人的示意图,它一共有 3 个关节,其中髋关节和膝关节是主动的, 脚部安装弹簧和大腿相连,故踝关节是被动的。这种在关节之间加装缓冲弹簧的方 法可以实现稳定的跳跃运动,于是被很多科学家采用,如美国麻省理工学院的 Fumiya Iida 和 Russ Tedrake 研制的被动式单腿跳跃机器人(图 1-8)。它通过髋关节的摆动能 够跳跃式地向前移动,并能登上一定坡度的阶梯[14]
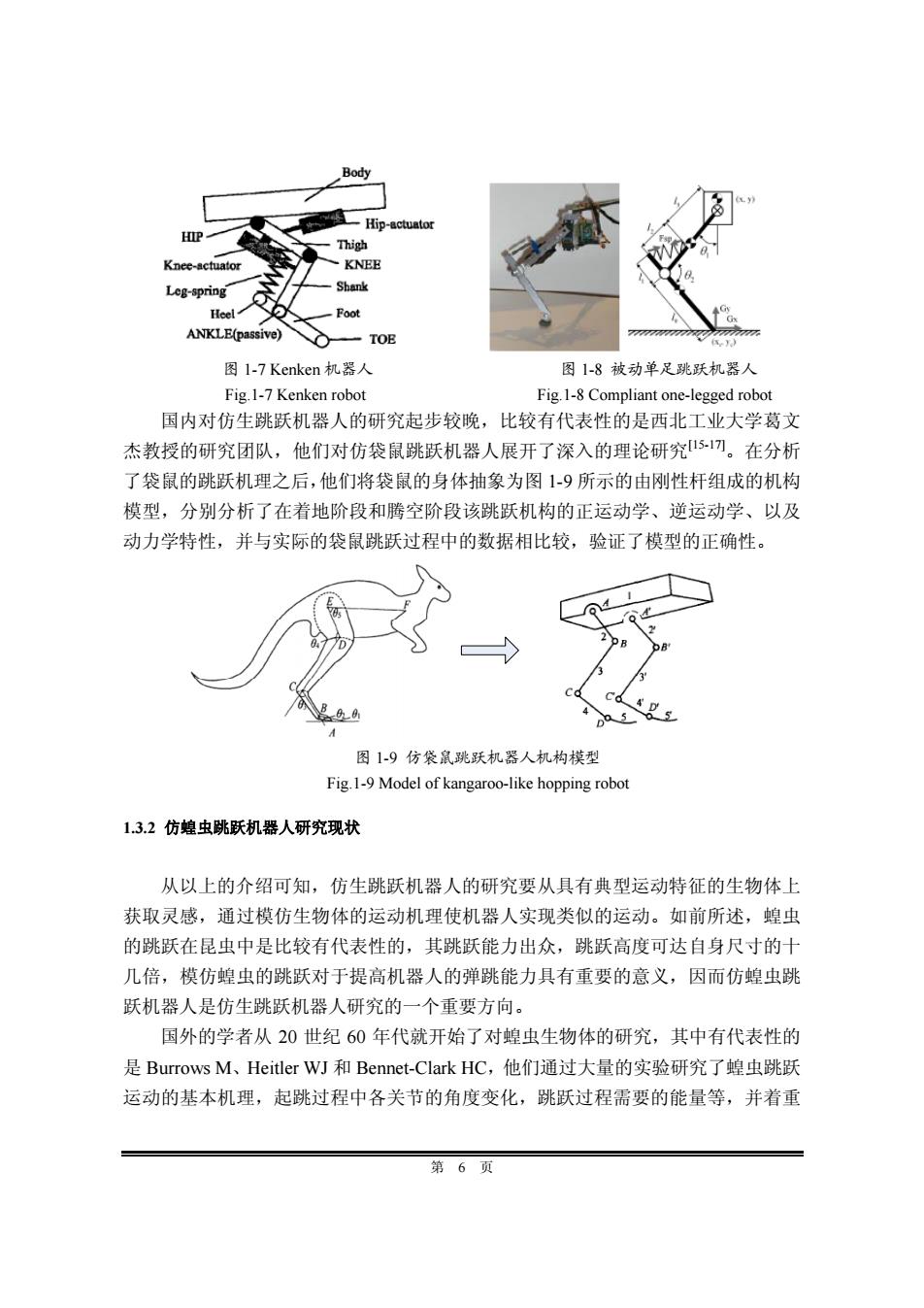
Body >sHp而-actuor HP一 Thigh Knee-actuator KNEE Leg-spring Shank Heel Foot ANKLE(passive) -TOE 图1-7 Kenken机器人 图1-8被动单足跳跃机器人 Fig.1-7 Kenken robot Fig.1-8 Compliant one-legged robot 国内对仿生跳跃机器人的研究起步较晚,比较有代表性的是西北工业大学葛文 杰教授的研究团队,他们对仿袋鼠跳跃机器人展开了深入的理论研究51刀。在分析 了袋鼠的跳跃机理之后,他们将袋鼠的身体抽象为图1-9所示的由刚性杆组成的机构 模型,分别分析了在着地阶段和腾空阶段该跳跃机构的正运动学、逆运动学、以及 动力学特性,并与实际的袋鼠跳跃过程中的数据相比较,验证了模型的正确性。 5 图19仿袋鼠跳跃机器人机构模型 Fig.1-9 Model of kangaroo-like hopping robot 13.2仿蝗虫跳跃机器人研究现状 从以上的介绍可知,仿生跳跃机器人的研究要从具有典型运动特征的生物体上 获取灵感,通过模仿生物体的运动机理使机器人实现类似的运动。如前所述,蝗虫 的跳跃在昆虫中是比较有代表性的,其跳跃能力出众,跳跃高度可达自身尺寸的十 几倍,模仿蝗虫的跳跃对于提高机器人的弹跳能力具有重要的意义,因而仿蝗虫跳 跃机器人是仿生跳跃机器人研究的一个重要方向。 国外的学者从20世纪60年代就开始了对蝗虫生物体的研究,其中有代表性的 是Burrows M、Heitler WJ和Bennet-Clark HC,他们通过大量的实验研究了蝗虫跳跃 运动的基本机理,起跳过程中各关节的角度变化,跳跃过程需要的能量等,并着重 第6页
第 6 页 图 1-7 Kenken 机器人 图 1-8 被动单足跳跃机器人 Fig.1-7 Kenken robot Fig.1-8 Compliant one-legged robot 国内对仿生跳跃机器人的研究起步较晚,比较有代表性的是西北工业大学葛文 杰教授的研究团队,他们对仿袋鼠跳跃机器人展开了深入的理论研究[15-17]。在分析 了袋鼠的跳跃机理之后,他们将袋鼠的身体抽象为图 1-9 所示的由刚性杆组成的机构 模型,分别分析了在着地阶段和腾空阶段该跳跃机构的正运动学、逆运动学、以及 动力学特性,并与实际的袋鼠跳跃过程中的数据相比较,验证了模型的正确性。 图 1-9 仿袋鼠跳跃机器人机构模型 Fig.1-9 Model of kangaroo-like hopping robot 1.3.2 仿蝗虫跳跃机器人研究现状 从以上的介绍可知,仿生跳跃机器人的研究要从具有典型运动特征的生物体上 获取灵感,通过模仿生物体的运动机理使机器人实现类似的运动。如前所述,蝗虫 的跳跃在昆虫中是比较有代表性的,其跳跃能力出众,跳跃高度可达自身尺寸的十 几倍,模仿蝗虫的跳跃对于提高机器人的弹跳能力具有重要的意义,因而仿蝗虫跳 跃机器人是仿生跳跃机器人研究的一个重要方向。 国外的学者从 20 世纪 60 年代就开始了对蝗虫生物体的研究,其中有代表性的 是 Burrows M、Heitler WJ 和 Bennet-Clark HC,他们通过大量的实验研究了蝗虫跳跃 运动的基本机理,起跳过程中各关节的角度变化,跳跃过程需要的能量等,并着重
研究了蝗虫后足的基本构造,后足中关节的划分、肌肉的分布、特殊的结构等1822。 但这些研究主要是基于生物学层面,并没有从仿生机器人的角度进行进一步的探索。 目前国内外对仿蝗虫跳跃机器人的研究成果主要有Umberto Scarfogliero等人研 制的微型跳跃机器人Gilo(图1-10)2],哈尔滨工业大学的余杭杞设计的仿蝗虫四 足跳跃机器人(图1-11)24,哈尔滨工程大学陈东良等人研制的仿生蝗虫跳跃机器 人2]。这些研究主要集中在对蝗虫外形结构的模拟以及跳跃的实现,但对仿蝗虫机 器人跳跃机理全面的理论研究却很少。 图1-10 Grillo微型跳跃机器人 图1-11仿蝗虫跳跃机器人 Fig.1-10 "Grillo"Mini hopping robot Fig.1-11 Locust-like hopping robot 1.4本文研究的主要内容 1.4.1研究方法及目标 本文将依据仿生学研究的方法对仿蝗虫机器人的跳跃运动进行系统的理论研 究。仿生学的主要研究方法是功能模拟法,一般是先建立模型,再进行模拟。仿生 学的研究可分为三个阶段2: 1)研究生物原型:根据提出的技术问题,有选择地研究生命有机体的某些结构 和功能,将所得生物资料进行提炼,吸取其中对技术有益的内容,得到一个 简化的生物模型。 2)建立数学模型:对生物模型提供的资料进行数学分析,进一步抽象化,用数 学语言把生物模型翻译成数学模型。 3)构造实物模型:根据数学模型,用电子、机械或化学方法构造实物模型,并 进行工程实验。在生物模拟的过程中,一般不是单纯的仿生,而是在仿生中 进一步创造,因此最后制成的技术装置往往与生物原型不同,甚至在某些性 能上超过生物原型。 第7页
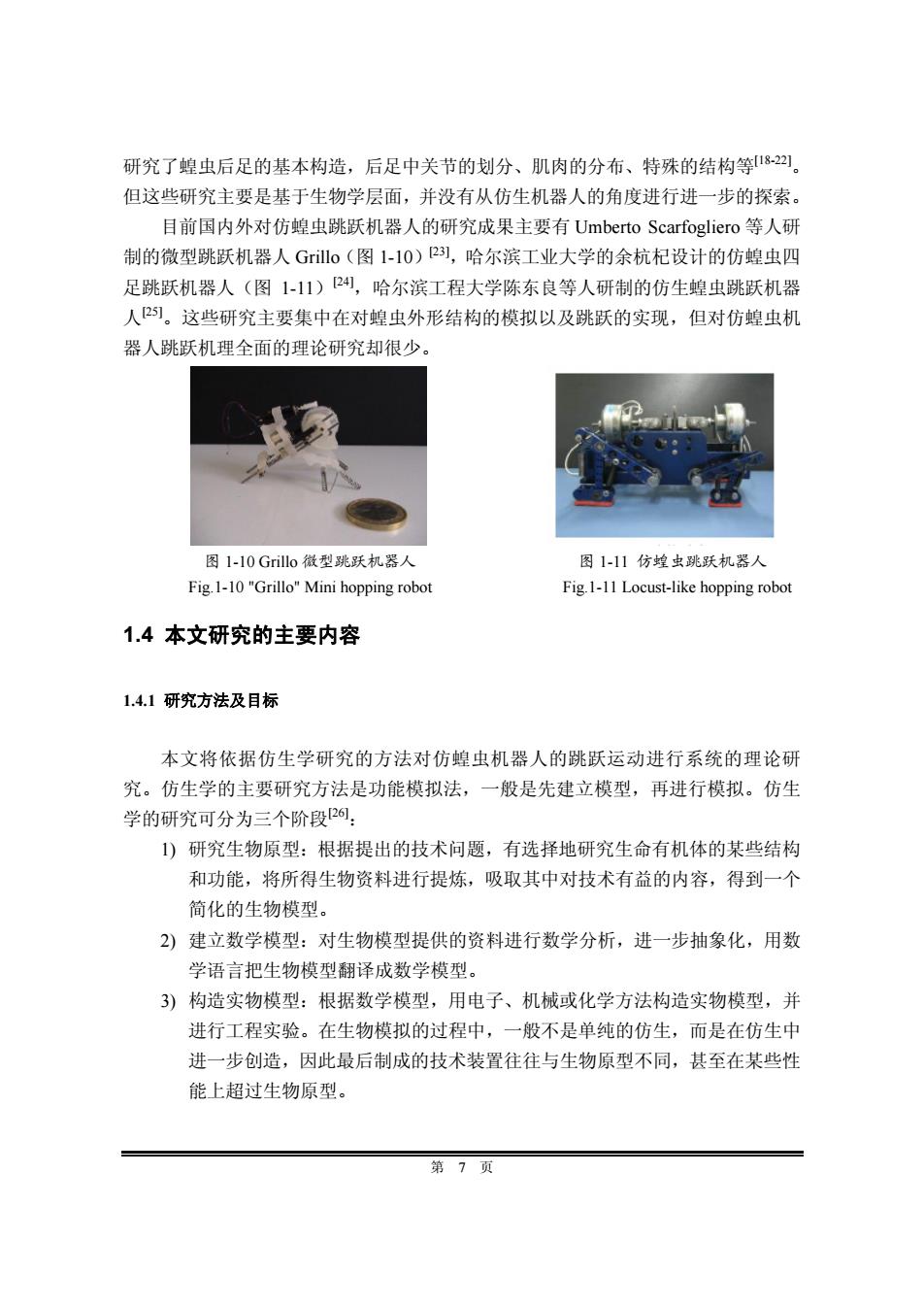
第 7 页 研究了蝗虫后足的基本构造,后足中关节的划分、肌肉的分布、特殊的结构等[18-22]。 但这些研究主要是基于生物学层面,并没有从仿生机器人的角度进行进一步的探索。 目前国内外对仿蝗虫跳跃机器人的研究成果主要有 Umberto Scarfogliero 等人研 制的微型跳跃机器人 Grillo(图 1-10)[23],哈尔滨工业大学的余杭杞设计的仿蝗虫四 足跳跃机器人(图 1-11)[24],哈尔滨工程大学陈东良等人研制的仿生蝗虫跳跃机器 人[25]。这些研究主要集中在对蝗虫外形结构的模拟以及跳跃的实现,但对仿蝗虫机 器人跳跃机理全面的理论研究却很少。 图 1-10 Grillo 微型跳跃机器人 图 1-11 仿蝗虫跳跃机器人 Fig.1-10 "Grillo" Mini hopping robot Fig.1-11 Locust-like hopping robot 1.4 本文研究的主要内容 1.4.1 研究方法及目标 本文将依据仿生学研究的方法对仿蝗虫机器人的跳跃运动进行系统的理论研 究。仿生学的主要研究方法是功能模拟法,一般是先建立模型,再进行模拟。仿生 学的研究可分为三个阶段[26]: 1) 研究生物原型:根据提出的技术问题,有选择地研究生命有机体的某些结构 和功能,将所得生物资料进行提炼,吸取其中对技术有益的内容,得到一个 简化的生物模型。 2) 建立数学模型:对生物模型提供的资料进行数学分析,进一步抽象化,用数 学语言把生物模型翻译成数学模型。 3) 构造实物模型:根据数学模型,用电子、机械或化学方法构造实物模型,并 进行工程实验。在生物模拟的过程中,一般不是单纯的仿生,而是在仿生中 进一步创造,因此最后制成的技术装置往往与生物原型不同,甚至在某些性 能上超过生物原型