center,the moment of momentum can be reduced to minimum,which will make the gesture control of air-phase easier.The air-phase is modeled and restriction equation of angular velocity of each linkage is obtained Finally,a bionic joint is designed to imitate the knee joint of locust.It contains spring as the energy storage equipment and a cam as storing and releasing device,which is optimally designed.The simulation result shows that the bionic joint can move as it is expected. KEY WORDS:locust-like hopping robot,take off,kinematics,dynamics, bionic joint 第IV页
第 IV 页 center, the moment of momentum can be reduced to minimum, which will make the gesture control of air-phase easier. The air-phase is modeled and restriction equation of angular velocity of each linkage is obtained. Finally, a bionic joint is designed to imitate the knee joint of locust. It contains spring as the energy storage equipment and a cam as storing and releasing device, which is optimally designed. The simulation result shows that the bionic joint can move as it is expected. KEY WORDS: locust-like hopping robot, take off, kinematics, dynamics, bionic joint

目录 摘要… ABSTRACT..... 第一章绪论… 1.1仿生跳跃机器人研究的意义 …1 1.2仿生跳跃运动分类 …2 1.2.1连续跳跃运动 2 1.2.2间歇性跳跃运动. 3 1.3仿生跳跃机器人研究现状 3 1.3.1一般仿生跳跃机器人研究现状 3 1.3.2仿蝗虫跳跃机器人研究现状 6 1.4本文研究的主要内容 7 1.4.1研究方法及目标 7 1.4.2内容安排… .8 1.5本章小结… 9 第二章蝗虫的生物原型分析及仿生模型的建立 .10 2.1蝗虫的生物原型… .10 2.1.1蝗虫的身体结构 10 2.1.2蝗虫后足的构造 .11 2.1.3蝗虫起跳过程.… 13 2.2仿蝗虫机器人机构模型的建立 .14 2.2.1机构模型及坐标系的建立 14 2.2.2基本运动参数 16 2.3本章小结 19 第三章仿蝗虫机器人起跳过程运动学研究 …20 3.1起跳过程正运动学分析 .20 3.1.1躯体位姿方程的推导 ..20 3.1.2躯体位姿变化分析 22 3.2起跳过程逆运动学分析. 25 3.3起跳过程的速度分析 27 3.3.1躯体质心速度方程 27 3.3.2起跳速度计算及分析. 29 第V页
第 V 页 目 录 摘 要........................................................................................................................................................ I ABSTRACT ......................................................................................................................................... III 第一章 绪论............................................................................................................................................1 1.1 仿生跳跃机器人研究的意义........................................................................................................1 1.2 仿生跳跃运动分类.......................................................................................................................2 1.2.1 连续跳跃运动.......................................................................................................................2 1.2.2 间歇性跳跃运动...................................................................................................................3 1.3 仿生跳跃机器人研究现状............................................................................................................3 1.3.1 一般仿生跳跃机器人研究现状...........................................................................................3 1.3.2 仿蝗虫跳跃机器人研究现状...............................................................................................6 1.4 本文研究的主要内容...................................................................................................................7 1.4.1 研究方法及目标...................................................................................................................7 1.4.2 内容安排...............................................................................................................................8 1.5 本章小结.......................................................................................................................................9 第二章 蝗虫的生物原型分析及仿生模型的建立 ..............................................................................10 2.1 蝗虫的生物原型.........................................................................................................................10 2.1.1 蝗虫的身体结构.................................................................................................................10 2.1.2 蝗虫后足的构造.................................................................................................................11 2.1.3 蝗虫起跳过程.....................................................................................................................13 2.2 仿蝗虫机器人机构模型的建立.................................................................................................14 2.2.1 机构模型及坐标系的建立.................................................................................................14 2.2.2 基本运动参数.....................................................................................................................16 2.3 本章小结.....................................................................................................................................19 第三章 仿蝗虫机器人起跳过程运动学研究 ......................................................................................20 3.1 起跳过程正运动学分析..............................................................................................................20 3.1.1 躯体位姿方程的推导.........................................................................................................20 3.1.2 躯体位姿变化分析.............................................................................................................22 3.2 起跳过程逆运动学分析..............................................................................................................25 3.3 起跳过程的速度分析..................................................................................................................27 3.3.1 躯体质心速度方程.............................................................................................................27 3.3.2 起跳速度计算及分析.........................................................................................................29

3.4起跳过程速度可操作性分析… 33 3.4.1速度的方向可操作性测度 33 3.4.2速度可操作性分析… 34 3.5本章小结… 036 第四章仿蝗虫机器人起跳过程动力学及空中运动研究 37 4.1起跳过程加速度分析 37 4.1.1跳跃的力学解释 .37 4.1.2躯体质心的加速度方程 .39 4.2起跳过程动力学分析 40 4.2.1机器人动力学分析方法 .40 4.2.2拉格朗日方程的推导 40 4.2.3计算结果及分析… 43 4.3起跳过程动量矩分析及优化 .46 4.3.1动量矩分析. 46 4.3.2质心轨迹优化. 48 4.4空中运动研究 50 4.5本章小结 52 第五章仿蝗虫机器人腿部膝关节设计 54 5.1关节设计的仿生学解释 54 5.1.1蝗虫后腿膝关节的特殊结构 .54 5.1.2仿生膝关节的组成部分 .54 5.2储能元件选择 55 5.3蓄力及释放装置设计 .57 5.3.1基于凸轮的设计方案 57 5.3.2从动件运动规律 .57 5.3.3凸轮廓线的优化设计 59 5.3.4仿生膝关节运动仿真 63 5.4本章小结 66 第六章总结与展望… …67 6.1全文总结.… .67 6.2研究展望. 68 参考文献… 69 致谢… .72 攻读硕士学位期间已发表或录用的论文 …73 第VⅥ页
第 VI 页 3.4 起跳过程速度可操作性分析......................................................................................................33 3.4.1 速度的方向可操作性测度.................................................................................................33 3.4.2 速度可操作性分析.............................................................................................................34 3.5 本章小结.....................................................................................................................................36 第四章 仿蝗虫机器人起跳过程动力学及空中运动研究 ..................................................................37 4.1 起跳过程加速度分析..................................................................................................................37 4.1.1 跳跃的力学解释.................................................................................................................37 4.1.2 躯体质心的加速度方程.....................................................................................................39 4.2 起跳过程动力学分析.................................................................................................................40 4.2.1 机器人动力学分析方法.....................................................................................................40 4.2.2 拉格朗日方程的推导.........................................................................................................40 4.2.3 计算结果及分析.................................................................................................................43 4.3 起跳过程动量矩分析及优化.....................................................................................................46 4.3.1 动量矩分析.........................................................................................................................46 4.3.2 质心轨迹优化.....................................................................................................................48 4.4 空中运动研究.............................................................................................................................50 4.5 本章小结.....................................................................................................................................52 第五章 仿蝗虫机器人腿部膝关节设计 ..............................................................................................54 5.1 关节设计的仿生学解释..............................................................................................................54 5.1.1 蝗虫后腿膝关节的特殊结构.............................................................................................54 5.1.2 仿生膝关节的组成部分.....................................................................................................54 5.2 储能元件选择.............................................................................................................................55 5.3 蓄力及释放装置设计.................................................................................................................57 5.3.1 基于凸轮的设计方案.........................................................................................................57 5.3.2 从动件运动规律.................................................................................................................57 5.3.3 凸轮廓线的优化设计.........................................................................................................59 5.3.4 仿生膝关节运动仿真.........................................................................................................63 5.4 本章小结.....................................................................................................................................66 第六章 总结与展望..............................................................................................................................67 6.1 全文总结.....................................................................................................................................67 6.2 研究展望.....................................................................................................................................68 参 考 文 献..........................................................................................................................................69 致 谢....................................................................................................................................................72 攻读硕士学位期间已发表或录用的论文 ............................................................................................73

第一章绪论 1.1仿生跳跃机器人研究的意义 机器人是人类最伟大的发明之一,机器人的出现从各个角度改变着人类社会。 随着科学技术的不断进步,机器人的功能越来越强大,智能程度越来越高,应用的 范围也越来越广,目前机器人广泛应用于工业、医疗、科研、军事和娱乐等领域。 在种类繁多的机器人当中,移动式机器人是一个重要的分支,它是指机器人本身不 固定,能够在较大范围内运动的机器人。移动机器人的种类很多,按运动方式和特 点可分为轮式机器人、履带式机器人、多足爬行或步行机器人等,这些机器人的研 究和开发己比较成熟,并广泛应用在各个领域。但是,这些移动机器人都需要紧贴 着地面运动,当遇到较大的障碍物或者是沟渠时,传统的移动方式就无能为力了。 随着机器人应用范围的扩大,我们需要机器人能够在恶劣的、非结构化的、未知的 环境中生存及工作,这就要求机器人具有很强的自主运动及地形适应能力。 跳跃机器人恰好能够克服传统移动机器人的缺点,其具有较强的运动性,能够 越过数倍于自身尺寸的障碍物或沟渠,对地形有较强的适应力,且跳跃运动的突然 性和爆发性有助于机器人躲避危险。在地球上,跳跃机器人以其强大的越障能力、 极快的跳跃速度、强大的地面适应能力、广阔的移动范围,为其在军事侦查、抢险 救灾等领域提供了良好的发展前景。在星际探索中,由于月球与火星表面的重力加 速度远远低于地球表面的重力加速度,跳跃机器人能充分利用这个特点来达到扩大 运动范围和节省能量的目的。 仿生学是20世纪60年代出现的一门综合性边缘学科,它由生命科学与工程技 术科学互相渗透、互相结合而成,通过学习、模仿、复制和再造生物系统的结构、 功能、工作原理及控制机制,来改进现有的或创造新的机械、仪器、建筑和工艺过 程山。在机器人领域里,仿生机器人应运而生,仿生机器人是模仿自然界中生物体的 精巧结构、运动原理和行为方式等的机器人系统。近年来,仿生机器人的研究己成 为机器人领域的研究热点,因为在漫长的进化过程中,生物体发展了灵巧的运动机构 和机敏的运动模式,这成为机器人发展取之不尽的知识源泉。 第1页
第 1 页 第一章 绪论 1.1 仿生跳跃机器人研究的意义 机器人是人类最伟大的发明之一,机器人的出现从各个角度改变着人类社会。 随着科学技术的不断进步,机器人的功能越来越强大,智能程度越来越高,应用的 范围也越来越广,目前机器人广泛应用于工业、医疗、科研、军事和娱乐等领域。 在种类繁多的机器人当中,移动式机器人是一个重要的分支,它是指机器人本身不 固定,能够在较大范围内运动的机器人。移动机器人的种类很多,按运动方式和特 点可分为轮式机器人、履带式机器人、多足爬行或步行机器人等,这些机器人的研 究和开发已比较成熟,并广泛应用在各个领域。但是,这些移动机器人都需要紧贴 着地面运动,当遇到较大的障碍物或者是沟渠时,传统的移动方式就无能为力了。 随着机器人应用范围的扩大,我们需要机器人能够在恶劣的、非结构化的、未知的 环境中生存及工作,这就要求机器人具有很强的自主运动及地形适应能力。 跳跃机器人恰好能够克服传统移动机器人的缺点,其具有较强的运动性,能够 越过数倍于自身尺寸的障碍物或沟渠,对地形有较强的适应力,且跳跃运动的突然 性和爆发性有助于机器人躲避危险。在地球上,跳跃机器人以其强大的越障能力、 极快的跳跃速度、强大的地面适应能力、广阔的移动范围,为其在军事侦查、抢险 救灾等领域提供了良好的发展前景。在星际探索中,由于月球与火星表面的重力加 速度远远低于地球表面的重力加速度,跳跃机器人能充分利用这个特点来达到扩大 运动范围和节省能量的目的。 仿生学是 20 世纪 60 年代出现的一门综合性边缘学科,它由生命科学与工程技 术科学互相渗透、互相结合而成,通过学习、模仿、复制和再造生物系统的结构、 功能、工作原理及控制机制,来改进现有的或创造新的机械、仪器、建筑和工艺过 程[1]。在机器人领域里,仿生机器人应运而生,仿生机器人是模仿自然界中生物体的 精巧结构、运动原理和行为方式等的机器人系统。近年来,仿生机器人的研究已成 为机器人领域的研究热点,因为在漫长的进化过程中,生物体发展了灵巧的运动机构 和机敏的运动模式,这成为机器人发展取之不尽的知识源泉
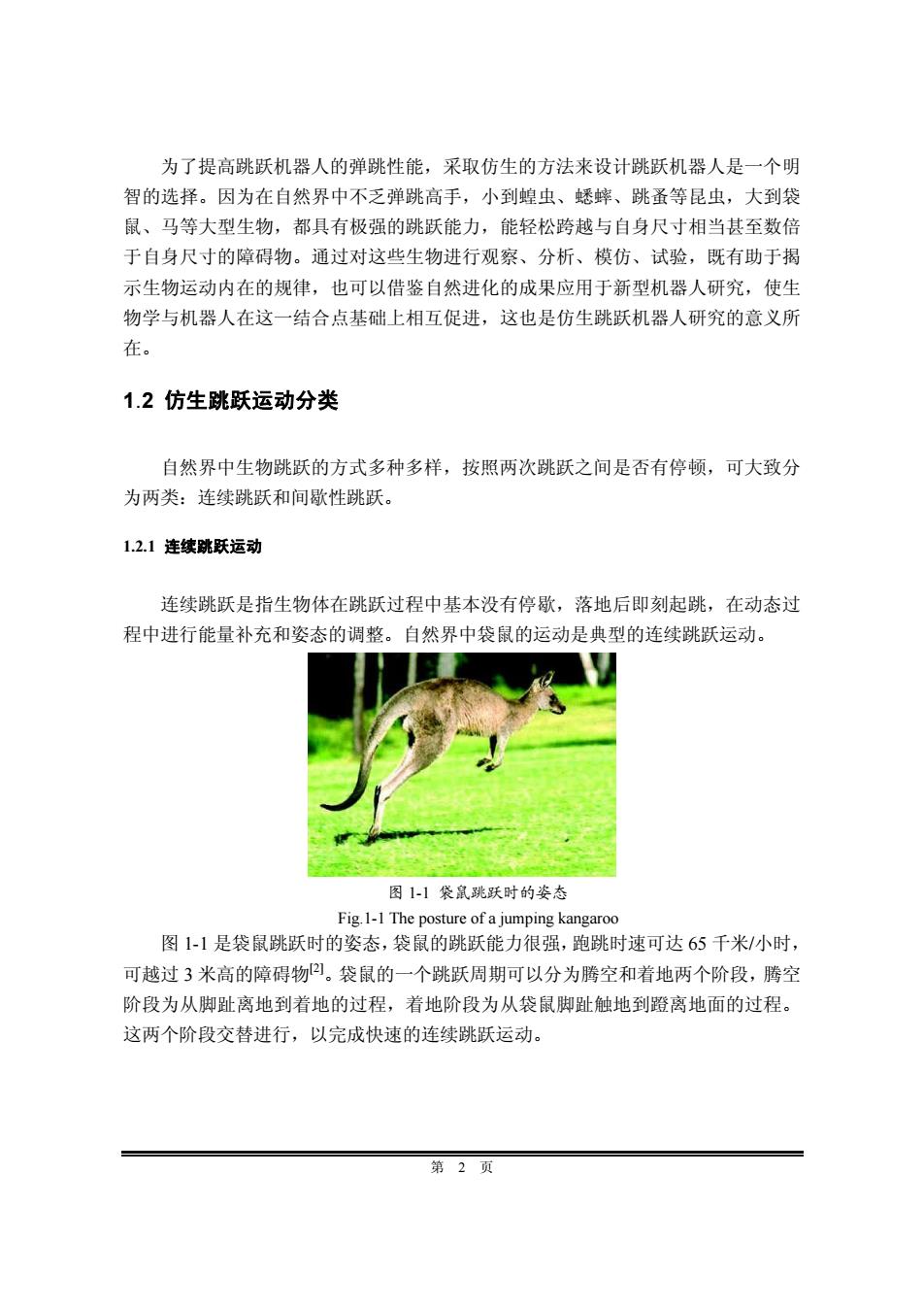
为了提高跳跃机器人的弹跳性能,采取仿生的方法来设计跳跃机器人是一个明 智的选择。因为在自然界中不乏弹跳高手,小到蝗虫、蟋蟀、跳蚤等昆虫,大到袋 鼠、马等大型生物,都具有极强的跳跃能力,能轻松跨越与自身尺寸相当甚至数倍 于自身尺寸的障碍物。通过对这些生物进行观察、分析、模仿、试验,既有助于揭 示生物运动内在的规律,也可以借鉴自然进化的成果应用于新型机器人研究,使生 物学与机器人在这一结合点基础上相互促进,这也是仿生跳跃机器人研究的意义所 在。 1.2仿生跳跃运动分类 自然界中生物跳跃的方式多种多样,按照两次跳跃之间是否有停顿,可大致分 为两类:连续跳跃和间歇性跳跃。 1.2.1连续跳跃运动 连续跳跃是指生物体在跳跃过程中基本没有停歇,落地后即刻起跳,在动态过 程中进行能量补充和姿态的调整。自然界中袋鼠的运动是典型的连续跳跃运动。 图1-】袋鼠跳跃时的姿态 Fig.1-1 The posture of a jumping kangaroo 图1-1是袋鼠跳跃时的姿态,袋鼠的跳跃能力很强,跑跳时速可达65千米/小时, 可越过3米高的障碍物闪。袋鼠的一个跳跃周期可以分为腾空和着地两个阶段,腾空 阶段为从脚趾离地到着地的过程,着地阶段为从袋鼠脚趾触地到蹬离地面的过程。 这两个阶段交替进行,以完成快速的连续跳跃运动。 第2页
第 2 页 为了提高跳跃机器人的弹跳性能,采取仿生的方法来设计跳跃机器人是一个明 智的选择。因为在自然界中不乏弹跳高手,小到蝗虫、蟋蟀、跳蚤等昆虫,大到袋 鼠、马等大型生物,都具有极强的跳跃能力,能轻松跨越与自身尺寸相当甚至数倍 于自身尺寸的障碍物。通过对这些生物进行观察、分析、模仿、试验,既有助于揭 示生物运动内在的规律,也可以借鉴自然进化的成果应用于新型机器人研究,使生 物学与机器人在这一结合点基础上相互促进,这也是仿生跳跃机器人研究的意义所 在。 1.2 仿生跳跃运动分类 自然界中生物跳跃的方式多种多样,按照两次跳跃之间是否有停顿,可大致分 为两类:连续跳跃和间歇性跳跃。 1.2.1 连续跳跃运动 连续跳跃是指生物体在跳跃过程中基本没有停歇,落地后即刻起跳,在动态过 程中进行能量补充和姿态的调整。自然界中袋鼠的运动是典型的连续跳跃运动。 图 1-1 袋鼠跳跃时的姿态 Fig.1-1 The posture of a jumping kangaroo 图 1-1 是袋鼠跳跃时的姿态,袋鼠的跳跃能力很强,跑跳时速可达 65 千米/小时, 可越过 3 米高的障碍物[2]。袋鼠的一个跳跃周期可以分为腾空和着地两个阶段,腾空 阶段为从脚趾离地到着地的过程,着地阶段为从袋鼠脚趾触地到蹬离地面的过程。 这两个阶段交替进行,以完成快速的连续跳跃运动