在这三个阶段中,研究生物原型是基础,构造实物模型是目的,而数学模型是 两者之间必不可少的桥梁。通过上一节的介绍可知,目前学者们对蝗虫生物原型的 研究已比较成熟。本文就是要在学者们所建立的蝗虫生物原型的基础上,进一步抽 象化,从而建立符合蝗虫跳跃运动特征的仿蝗虫机器人的机构模型和数学模型,并 提出仿蝗虫机器人运动学、动力学理论研究的方法,通过系统的分析揭示仿蝗虫机 器人的运动特性和跳跃机理,通过与生物实验的对比验证模型的有效性和分析方法 的正确性,为建立仿蝗虫机器人的实物模型提供理论基础。 由于蝗虫是间歇性跳跃生物,仿蝗虫机器人也采用间歇跳跃的方式。间歇性跳 跃机器人的起跳过程是一个由静到动的过程,其起跳过程的运动情况将直接影响到 最终的跳跃效果,所以本文将着重研究机器人起跳过程的各项运动学、动力学参数, 以期达到理想的跳跃效果。另外为了实现间歇性跳跃,需要从蝗虫的身体结构入手, 考虑如何设计机器人的动力装置,以积蓄更多的跳跃能量,怎样在起跳前进行蓄能, 在起跳时采用某种装置来瞬间释放能量。这些都是研究仿蝗虫机器人时需要考虑的 问题。 1.4.2内容安排 本文各章节的内容安排如下: 第一章:介绍国内外仿生跳跃机器人的研究现状,阐述研究仿蝗虫跳跃机器人 的背景、原因、意义和将要采取的方法。 第二章:介绍蝗虫的身体构造及跳跃机理,在生物原型的基础上建立仿蝗虫机 器人的机构模型,并从前人的生物学实验中得到理论分析的原始数据。 第三章:采用机器人运动学分析的DH法对仿蝗虫机器人起跳过程进行正运动 学、逆运动学分析,揭示其起跳过程中躯体姿态变化、速度变化等运动规律以及机 构的速度传递性能,将分析的结果同已有的生物实验数据作对比。 第四章:在运动学分析的基础上,采用拉格朗日法建立仿蝗虫机器人起跳过程 动力学方程,得出各关节驱动力矩的变化规律以及地面对机器人的作用力,分析膝 关节处弹性储能装置对机器人动力特性的影响。研究起跳过程的动量矩变化,对机 器人起跳后的运动进行预测。最后对仿蝗虫机器人在空中的运动进行初步的建模和 研究。 第五章:根据蝗虫后足膝关节处的特殊结构,提出仿蝗虫机器人膝关节设计的 方案,并进行关键部分的详细设计,通过仿真软件验证设计的可行性。 第六章:全文总结及研究展望。 第8页
第 8 页 在这三个阶段中,研究生物原型是基础,构造实物模型是目的,而数学模型是 两者之间必不可少的桥梁。通过上一节的介绍可知,目前学者们对蝗虫生物原型的 研究已比较成熟。本文就是要在学者们所建立的蝗虫生物原型的基础上,进一步抽 象化,从而建立符合蝗虫跳跃运动特征的仿蝗虫机器人的机构模型和数学模型,并 提出仿蝗虫机器人运动学、动力学理论研究的方法,通过系统的分析揭示仿蝗虫机 器人的运动特性和跳跃机理,通过与生物实验的对比验证模型的有效性和分析方法 的正确性,为建立仿蝗虫机器人的实物模型提供理论基础。 由于蝗虫是间歇性跳跃生物,仿蝗虫机器人也采用间歇跳跃的方式。间歇性跳 跃机器人的起跳过程是一个由静到动的过程,其起跳过程的运动情况将直接影响到 最终的跳跃效果,所以本文将着重研究机器人起跳过程的各项运动学、动力学参数, 以期达到理想的跳跃效果。另外为了实现间歇性跳跃,需要从蝗虫的身体结构入手, 考虑如何设计机器人的动力装置,以积蓄更多的跳跃能量,怎样在起跳前进行蓄能, 在起跳时采用某种装置来瞬间释放能量。这些都是研究仿蝗虫机器人时需要考虑的 问题。 1.4.2 内容安排 本文各章节的内容安排如下: 第一章:介绍国内外仿生跳跃机器人的研究现状,阐述研究仿蝗虫跳跃机器人 的背景、原因、意义和将要采取的方法。 第二章:介绍蝗虫的身体构造及跳跃机理,在生物原型的基础上建立仿蝗虫机 器人的机构模型,并从前人的生物学实验中得到理论分析的原始数据。 第三章:采用机器人运动学分析的 D-H 法对仿蝗虫机器人起跳过程进行正运动 学、逆运动学分析,揭示其起跳过程中躯体姿态变化、速度变化等运动规律以及机 构的速度传递性能,将分析的结果同已有的生物实验数据作对比。 第四章:在运动学分析的基础上,采用拉格朗日法建立仿蝗虫机器人起跳过程 动力学方程,得出各关节驱动力矩的变化规律以及地面对机器人的作用力,分析膝 关节处弹性储能装置对机器人动力特性的影响。研究起跳过程的动量矩变化,对机 器人起跳后的运动进行预测。最后对仿蝗虫机器人在空中的运动进行初步的建模和 研究。 第五章:根据蝗虫后足膝关节处的特殊结构,提出仿蝗虫机器人膝关节设计的 方案,并进行关键部分的详细设计,通过仿真软件验证设计的可行性。 第六章:全文总结及研究展望
1.5本章小结 本章介绍了仿生跳跃机器人研究的意义及在国内外的研究现状,阐述了研究仿 蝗虫跳跃机器人的原因、意义和基本方法,并对全文的内容作了说明和介绍。 第9页
第 9 页 1.5 本章小结 本章介绍了仿生跳跃机器人研究的意义及在国内外的研究现状,阐述了研究仿 蝗虫跳跃机器人的原因、意义和基本方法,并对全文的内容作了说明和介绍
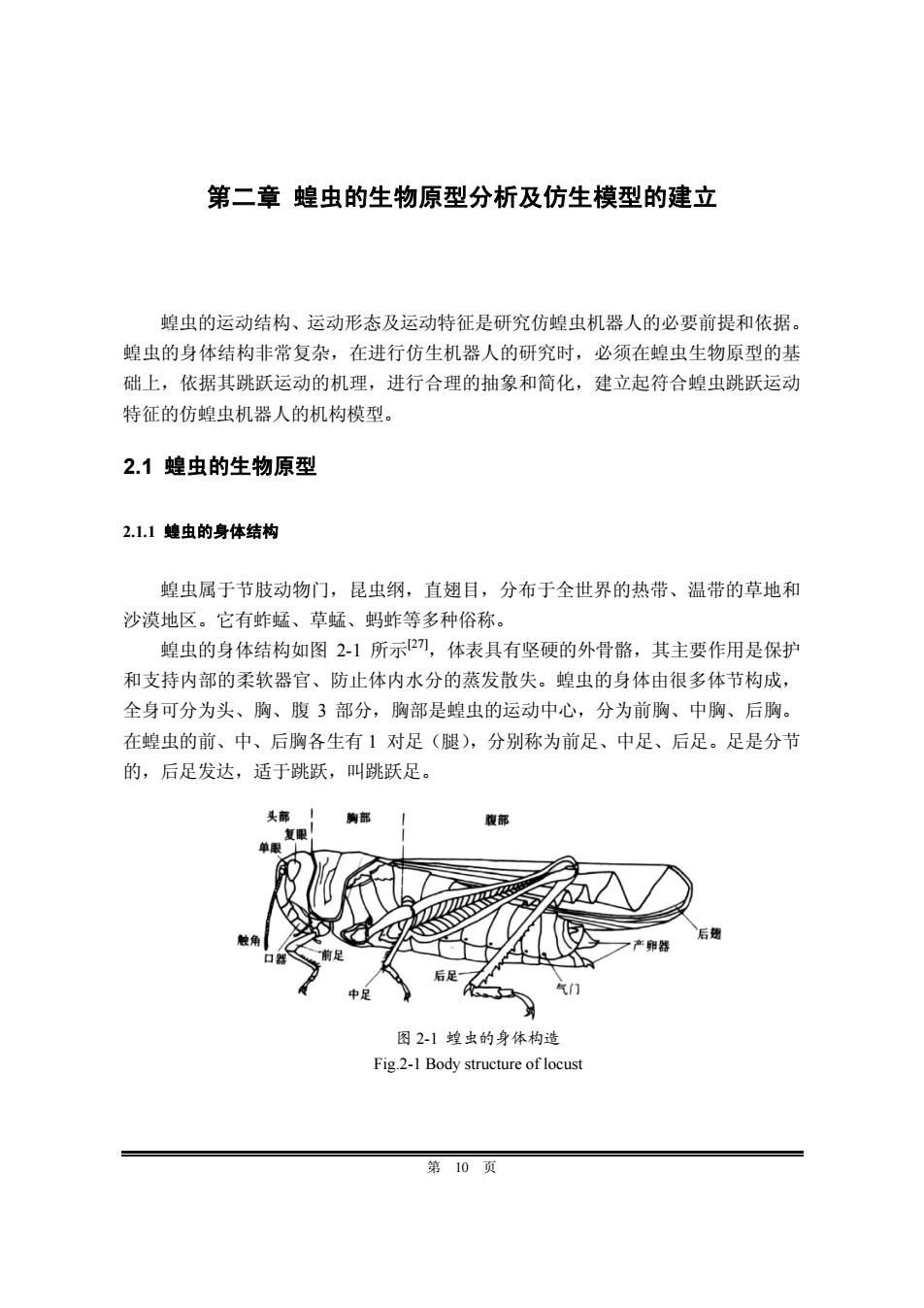
第二章蝗虫的生物原型分析及仿生模型的建立 蝗虫的运动结构、运动形态及运动特征是研究仿蝗虫机器人的必要前提和依据。 蝗虫的身体结构非常复杂,在进行仿生机器人的研究时,必须在蝗虫生物原型的基 础上,依据其跳跃运动的机理,进行合理的抽象和简化,建立起符合蝗虫跳跃运动 特征的仿蝗虫机器人的机构模型。 2.1蝗虫的生物原型 2.1.1蝗虫的身体结构 蝗虫属于节肢动物门,昆虫纲,直翅目,分布于全世界的热带、温带的草地和 沙漠地区。它有蚱蜢、草蜢、蚂蚱等多种俗称。 蝗虫的身体结构如图2-1所示2),体表具有坚硬的外骨骼,其主要作用是保护 和支持内部的柔软器官、防止体内水分的蒸发散失。蝗虫的身体由很多体节构成, 全身可分为头、胸、腹3部分,胸部是蝗虫的运动中心,分为前胸、中胸、后胸。 在蝗虫的前、中、后胸各生有1对足(腿),分别称为前足、中足、后足。足是分节 的,后足发达,适于跳跃,叫跳跃足。 头部 腹部 后 产卵器 图2-1蝗虫的身体构造 Fig.2-1 Body structure of locust 第10页
第 10 页 第二章 蝗虫的生物原型分析及仿生模型的建立 蝗虫的运动结构、运动形态及运动特征是研究仿蝗虫机器人的必要前提和依据。 蝗虫的身体结构非常复杂,在进行仿生机器人的研究时,必须在蝗虫生物原型的基 础上,依据其跳跃运动的机理,进行合理的抽象和简化,建立起符合蝗虫跳跃运动 特征的仿蝗虫机器人的机构模型。 2.1 蝗虫的生物原型 2.1.1 蝗虫的身体结构 蝗虫属于节肢动物门,昆虫纲,直翅目,分布于全世界的热带、温带的草地和 沙漠地区。它有蚱蜢、草蜢、蚂蚱等多种俗称。 蝗虫的身体结构如图 2-1 所示[27],体表具有坚硬的外骨骼,其主要作用是保护 和支持内部的柔软器官、防止体内水分的蒸发散失。蝗虫的身体由很多体节构成, 全身可分为头、胸、腹 3 部分,胸部是蝗虫的运动中心,分为前胸、中胸、后胸。 在蝗虫的前、中、后胸各生有 1 对足(腿),分别称为前足、中足、后足。足是分节 的,后足发达,适于跳跃,叫跳跃足。 图 2-1 蝗虫的身体构造 Fig.2-1 Body structure of locust

2.1.2蝗虫后足的构造 蝗虫的跳跃主要依靠后足,其后足要远远大于前足和中足,如图2-2所示,完全 伸展时后足大约有40mm长,是其它足的3倍多28)。蝗虫的后足主要由腿节(Femur)、 胫节(Tibia)和脚掌(Tarsus)组成,腿节与身体相连,可绕身体转动,胫节可绕腿节转 动,脚掌为蝗虫提供较大的抓地力,使其起跳时不会与地面产生相对滑动2。蝗虫 后足腿节的肌肉非常发达,主要分为屈肌和伸肌,它们收缩时通过肌腱拉动胫节绕 关节转动。如图2-3),伸肌明显比屈肌发达,屈肌收缩时通过肌腱拉动胫节向内回 收,伸肌收缩时带动胫节快速向外摆动。由图可知,屈肌的作用主要是完成起跳前 收腿的动作,而伸肌则是完成起跳时蹬腿的动作。 腿节 胫节 脚掌 前足 中足 后足 图2-2蝗虫各足的基本构造 Fig.2-2 Structure of locust's legs fexcr pull Step1 Step 2 Step 3 屈肌 伸肌 Step 4 Step 5 Step 6 图2-3伸肌和屈肌的作用 Fig.2-3 Functions of extensor muscles and flexor muscles 研究表明,蝗虫要实现较好的跳跃必须满足两个条件:大的撑地力以及后足快 第11页
第 11 页 2.1.2 蝗虫后足的构造 蝗虫的跳跃主要依靠后足,其后足要远远大于前足和中足,如图 2-2 所示,完全 伸展时后足大约有 40mm 长,是其它足的 3 倍多[28]。蝗虫的后足主要由腿节(Femur)、 胫节(Tibia)和脚掌(Tarsus)组成,腿节与身体相连,可绕身体转动,胫节可绕腿节转 动,脚掌为蝗虫提供较大的抓地力,使其起跳时不会与地面产生相对滑动[29]。蝗虫 后足腿节的肌肉非常发达,主要分为屈肌和伸肌,它们收缩时通过肌腱拉动胫节绕 关节转动。如图 2-3[28],伸肌明显比屈肌发达,屈肌收缩时通过肌腱拉动胫节向内回 收,伸肌收缩时带动胫节快速向外摆动。由图可知,屈肌的作用主要是完成起跳前 收腿的动作,而伸肌则是完成起跳时蹬腿的动作。 图 2-2 蝗虫各足的基本构造 Fig.2-2 Structure of locust’s legs 图 2-3 伸肌和屈肌的作用 Fig.2-3 Functions of extensor muscles and flexor muscles 研究表明,蝗虫要实现较好的跳跃必须满足两个条件:大的撑地力以及后足快
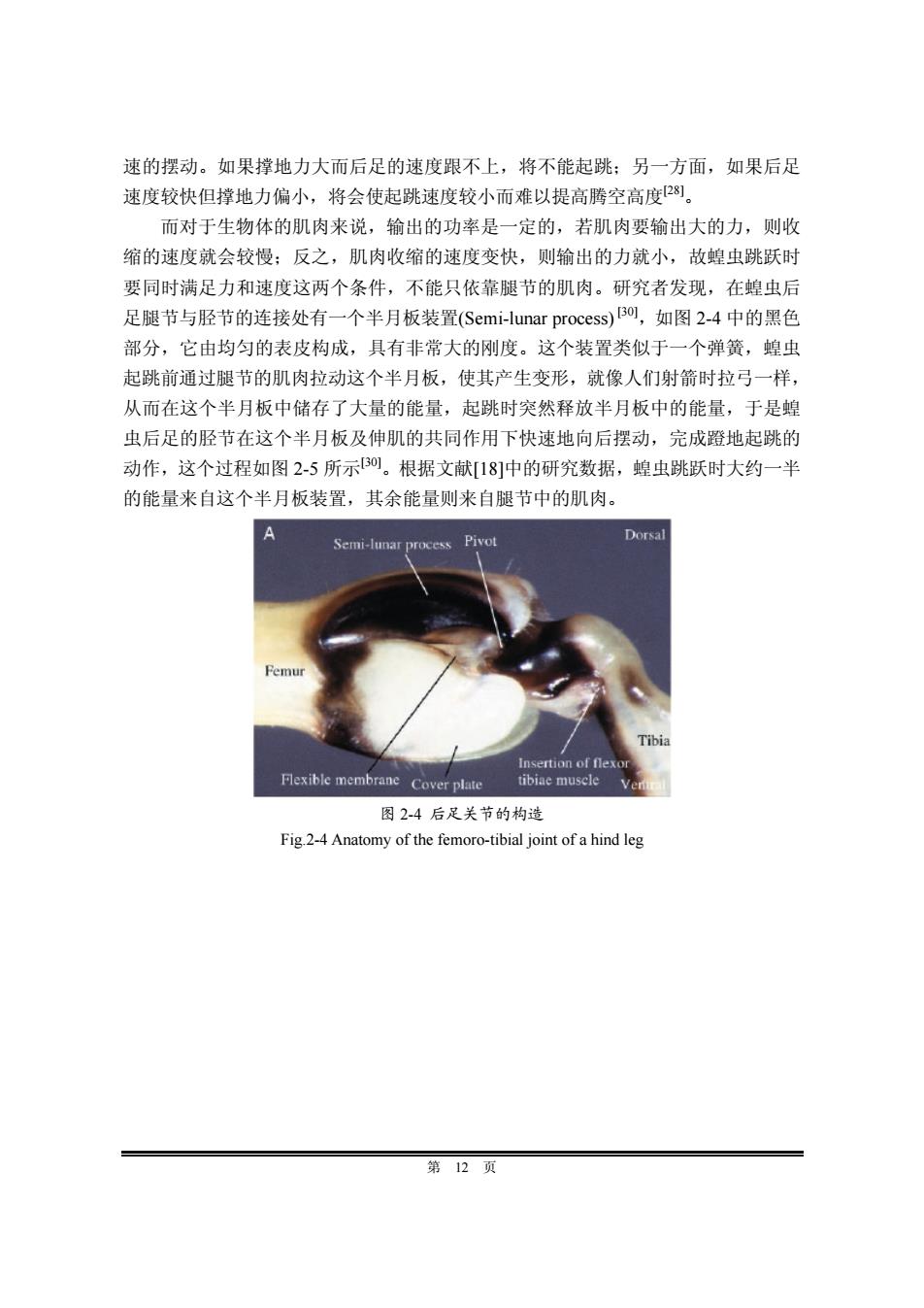
速的摆动。如果撑地力大而后足的速度跟不上,将不能起跳:另一方面,如果后足 速度较快但撑地力偏小,将会使起跳速度较小而难以提高腾空高度]。 而对于生物体的肌肉来说,输出的功率是一定的,若肌肉要输出大的力,则收 缩的速度就会较慢;反之,肌肉收缩的速度变快,则输出的力就小,故蝗虫跳跃时 要同时满足力和速度这两个条件,不能只依靠腿节的肌肉。研究者发现,在蝗虫后 足腿节与胫节的连接处有一个半月板装置(Semi--lunar process)Bo,如图2-4中的黑色 部分,它由均匀的表皮构成,具有非常大的刚度。这个装置类似于一个弹簧,蝗虫 起跳前通过腿节的肌肉拉动这个半月板,使其产生变形,就像人们射箭时拉弓一样, 从而在这个半月板中储存了大量的能量,起跳时突然释放半月板中的能量,于是蝗 虫后足的胫节在这个半月板及伸肌的共同作用下快速地向后摆动,完成蹬地起跳的 动作,这个过程如图2-5所示0。根据文献18]中的研究数据,蝗虫跳跃时大约一半 的能量来自这个半月板装置,其余能量则来自腿节中的肌肉。 Semi-lunar process Pivot Dorsal Femur Tibia Insertion of flexor Flexible membrane Cover plate tibiae musele 图2-4后足关节的构造 Fig.2-4 Anatomy of the femoro-tibial joint of a hind leg 第12页
第 12 页 速的摆动。如果撑地力大而后足的速度跟不上,将不能起跳;另一方面,如果后足 速度较快但撑地力偏小,将会使起跳速度较小而难以提高腾空高度[28]。 而对于生物体的肌肉来说,输出的功率是一定的,若肌肉要输出大的力,则收 缩的速度就会较慢;反之,肌肉收缩的速度变快,则输出的力就小,故蝗虫跳跃时 要同时满足力和速度这两个条件,不能只依靠腿节的肌肉。研究者发现,在蝗虫后 足腿节与胫节的连接处有一个半月板装置(Semi-lunar process) [30],如图 2-4 中的黑色 部分,它由均匀的表皮构成,具有非常大的刚度。这个装置类似于一个弹簧,蝗虫 起跳前通过腿节的肌肉拉动这个半月板,使其产生变形,就像人们射箭时拉弓一样, 从而在这个半月板中储存了大量的能量,起跳时突然释放半月板中的能量,于是蝗 虫后足的胫节在这个半月板及伸肌的共同作用下快速地向后摆动,完成蹬地起跳的 动作,这个过程如图 2-5 所示[30]。根据文献[18]中的研究数据,蝗虫跳跃时大约一半 的能量来自这个半月板装置,其余能量则来自腿节中的肌肉。 图 2-4 后足关节的构造 Fig.2-4 Anatomy of the femoro-tibial joint of a hind leg