7.2 边缘点检测 在数字图像处理中,常用差分来近似导数。连续函数∫(,y) 的梯度在x和y方向的分量就对应于数字图像f(m,n)的水平 和垂直方向的差分。水平和垂直方向的梯度可定义为: G,(m,n)=f(m,n)-f(m,n-1) Gy(m,n)=f(m,n)-f(m-1,n) 对应水平及垂直方向的梯度模板可表示 0 0 -1 0 W,= -1 1 W.= 0 000 0 0 利用模板的图像处理相当于模板与图像的卷积,因 此,水平和垂直方向梯度为 G,m,m)=F(m,n)*Wh Gy(m,n)=F(m,n)*W Digital Image Processing
Digital Image Processing Digital Image Processing 7.2 边缘点检测 在数字图像处理中,常用差分来近似导数。连续函数 的梯度在x和y方向的分量就对应于数字图像 的水平 和垂直方向的差分。水平和垂直方向的梯度可定义为: f (,) m n f (, ) x y ( , ) ( , ) ( , 1) ( , ) ( , ) ( 1, ) h v G mn f mn f mn G mn f mn f m n = − − = −− ⎧ ⎨ ⎩ 对应水平及垂直方向的梯度模板可表示 0 00 110 0 00 Wh ⎡ ⎤ ⎢ ⎥ = −⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 0 10 010 000 Wv ⎡ ⎤ − ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 利用模板的图像处理相当于模板与图像的卷积,因 此,水平和垂直方向梯度为 ( ,) ( ,) ( ,) ( ,) h h v v G mn F mn W G mn F mn W ⎧ ⎪ ⎨ ⎪⎩ = ∗ = ∗
7.2 边缘点检测 梯度幅度为 G(m.n)=[G2(m,n)+G(m,n) (7.2.10) 或 (7.2.11) 或 G(m,n)=G,(m,n)+G.(m.n) G(m,n)maxG,(m,n),G,(m,n) (7.2.12) 根据不同图像需要来选用上述三种梯度幅度公式,所得 结果称为梯度图像 为检测边缘点,可选取适当的阑值T,对梯度图像进行 二值化,即 B)usr Digital Image Processing
Digital Image Processing Digital Image Processing 梯度幅度为 (7.2.10) 或 (7.2.11) 或 (7.2.12) 根据不同图像需要来选用上述三种梯度幅度公式,所得 结果称为梯度图像 。 为检测边缘点,可选取适当的阈值T,对梯度图像进行 二值化,即 1 2 2 2 ( , ) [ ( , ) ( , )] h Gmn G mn G mn = + v (,) (,) (,) Gmn G mn G mn = + h v ( , ) max{ ( , ), ( , )} Gmn G mn G mn = h v 7.2 边缘点检测 {1 ; ( ,) 0 ; (,) G mn T else Bmn ≥ =
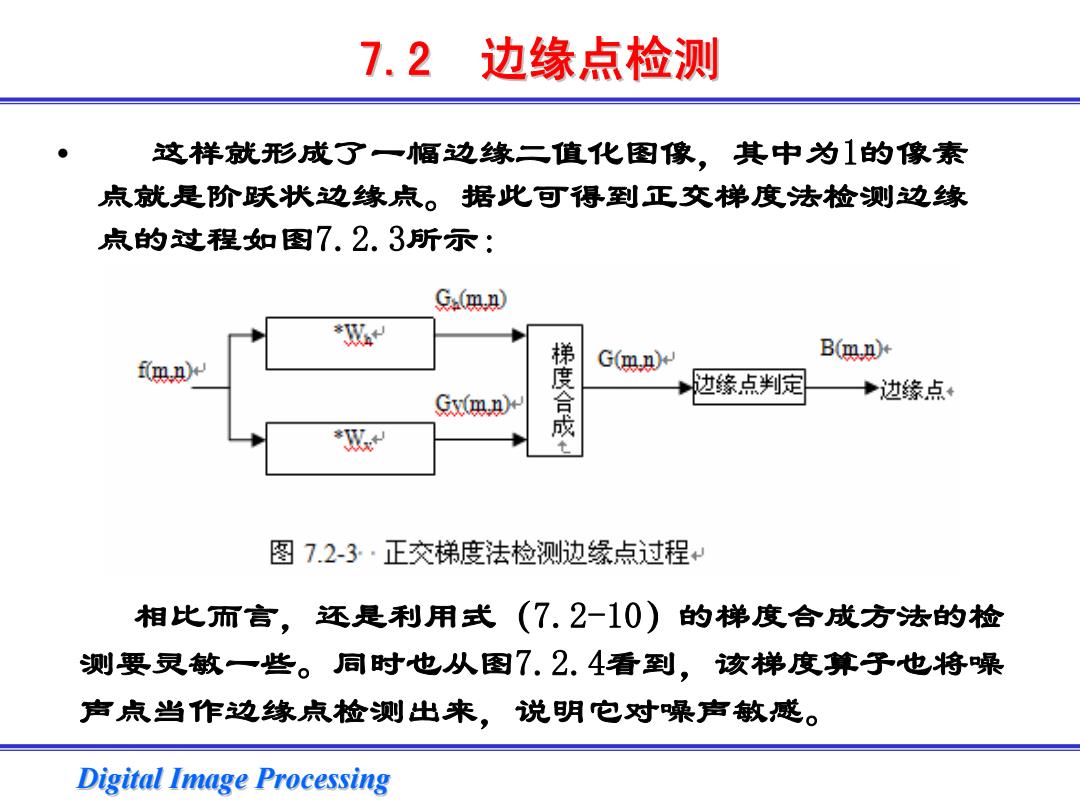
7.2边缘点检测 ● 这样就形成了一幅边缘二值化图像,其中为的像素 点就是阶跃状边缘点。据此可得到正交梯度法检测边缘 点的过程如图7.2.3所示: G.(m.n) G(m.n+ B(m.n)+ f式 度合成 边缘点判定 →边缘点+ Gy(m.n) 图7.2-3·正交梯度法检测边绿点过程 相比而言,还是利用式(7.2-10)的梯度合成方法的检 测要灵敏一些。同时也从图7.2.4看到,该梯度算子也将噪 声点当作边缘点检测出来。说明它对噪声敏感。 Digital Image Processing
Digital Image Processing Digital Image Processing • 这样就形成了一幅边缘二值化图像,其中为1的像素 点就是阶跃状边缘点。据此可得到正交梯度法检测边缘 点的过程如图7.2.3所示: 7.2 边缘点检测 相比而言,还是利用式(7.2-10)的梯度合成方法的检 测要灵敏一些。同时也从图7.2.4看到,该梯度算子也将噪 声点当作边缘点检测出来,说明它对噪声敏感

7.2边缘点检测 (a) (b) d (e) () 图7.2.4 正交梯度法检测边缘点示例 (a) 原图像; (b)水平梯度图;(c)垂直梯度图;(d)、(e)、(f) 为分别用式(7.2.10)、(7.2.11)和(7.2.12)的合成梯度图 Digital Image Processing
Digital Image Processing Digital Image Processing (a) (b) (c) (d) (e) (f) 图7.2.4 正交梯度法检测边缘点示例 (a)原图像;(b)水平梯度图;(c)垂直梯度图;(d)、(e)、(f) 为分别用式(7.2.10)、(7.2.11)和(7.2.12)的合成梯度图 7.2 边缘点检测
7.2 边缘点检测 2.Roberts梯度算子法 (4点差分法) ■Roberts梯度就是采用对角方向相邻两像素之差,故也称为 四点差分法。其水平和垂直方向梯度定义为: Gp(m,n)=f(m.n)-f(m-l,n-1) Gy(m,n)=f(m.n-l)-f(m-l,n) 对应的水平和垂直方向的模板为: -100 0 W=010 W.= 1 0 0 ■特点: 用4点进行差分,以求得梯度。方法简单。 其缺点是对噪 声较敏感。常用于不含噪声的图像边缘点检测。 Digital Image Processing
Digital Image Processing Digital Image Processing ▓ Roberts Roberts梯度就是采用对角方向相邻两像素之差,故也称为 梯度就是采用对角方向相邻两像素之差,故也称为 四点差分法。其水平和垂直方向梯度定义为: 四点差分法。其水平和垂直方向梯度定义为: ▓对应的水平和垂直方向的模板为: 对应的水平和垂直方向的模板为: ▓ 特点: 用4点进行差分,以求得梯度,方法简单。其缺点是对噪 进行差分,以求得梯度,方法简单。其缺点是对噪 声较敏感,常用于不含噪声的图像边缘点检测。 常用于不含噪声的图像边缘点检测。 2. Roberts Roberts梯度算子法(4点差分法) ( , ) ( , ) ( 1, 1) ( , ) ( , 1) ( 1, ) h v G mn f mn f m n G mn f mn f m n ⎧⎪⎨⎪⎩ 7.2 边缘点检测 = − −− = −− − 100 0 10 0 00 Wh ⎡− ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 0 10 100 000 Wv ⎡ ⎤ − ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦