2.4自动控制系统运动方程的建立 令 K=KoKk32k=KoKK2K3 得 rd+亚+k=K+K: dua 对u=0,有 T+亚+k=K, dus 对u=0,有 rd+d匹+k,=K dT 第2章自动控制系统基本知识 16
第2章 自动控制系统基本知识 16 2 0 0 2 + + = + 0 d d d T dT du T kT Ku K dt dT dt 0 1 3 0 1 2 3 令 K K K K k K K K K = = , 得 对u=0,有 2 0 0 2 + + =0 d d d T dT du T kT K dt dT dt 对u d=0,有 2 0 0 2 + + =0 d T dT T kT Ku dt dT 2.4 自动控制系统运动方程的建立
2.4自动控制系统运动方程的建立 2.4.2由运动方程求系统的特性 两种方法:经典法;拉普拉斯变换法。后者简单 例2-11如前例所示炉温控制系统的微分方程 dua dt2 dT 设ua为单位阶跃函数 0,t<0 4=10=1,t>0 第2章自动控制系统基本知识 17
第2章 自动控制系统基本知识 17 2.4.2 由运动方程求系统的特性 两种方法:经典法;拉普拉斯变换法。后者简单 例2-11 如前例所示炉温控制系统的微分方程 2 0 0 2 + + =0 d d d T dT du T kT K dt dT dt 设ud为单位阶跃函数 0, 0 1( ) { 1, 0 = = d t u t t 2.4 自动控制系统运动方程的建立
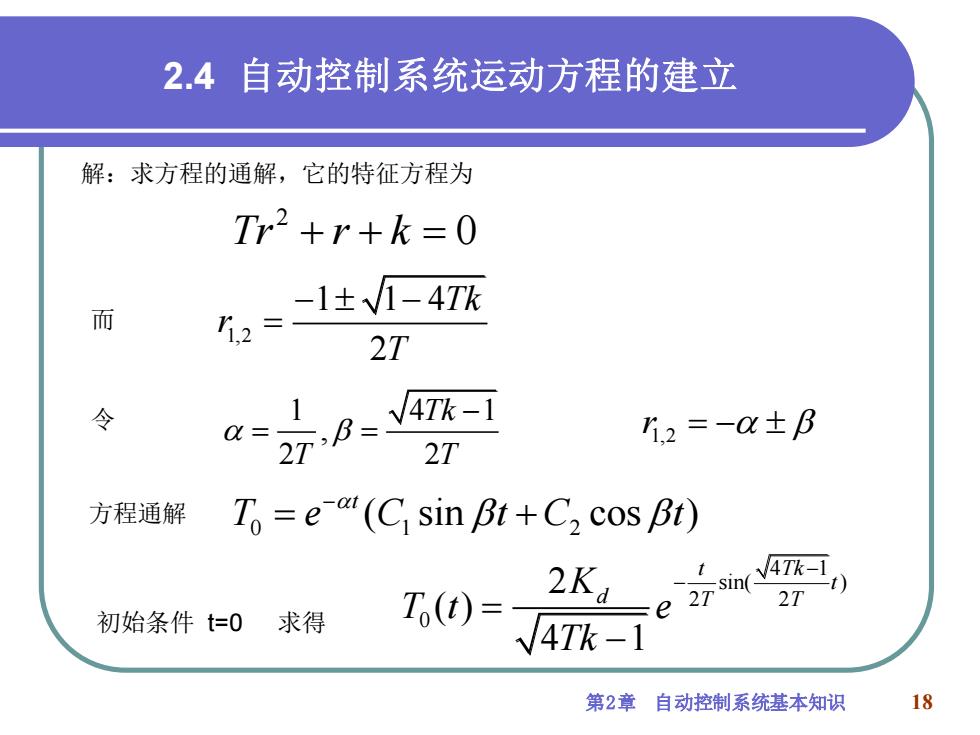
2.4自动控制系统运动方程的建立 解:求方程的通解,它的特征方程为 Tr2+r+k=0 -1±√1-4Tk 而 ,2= 2T 令 a= 7B=4R- 1,2=-C±B 2T 方程通解 To=e (C sin Bt+C2 cos Bt) T(t)=- 2Ka 一5—si4E) e t 初始条件t=0 求得 4Tk-1 第2章自动控制系统基本知识 18
第2章 自动控制系统基本知识 18 解:求方程的通解,它的特征方程为 2 Tr r k + + = 0 而 1,2 1 1 4 2 − − = Tk r T 令 1 4 1 , 2 2 − = = Tk T T r1,2 = − 0 1 2 ( sin cos ) − = + t T e C t C t 方程通解 初始条件 t=0 求得 4 1 sin( ) 2 2 0 2 ( ) 4 1 − − = − t Tk t d T T K T t e Tk 2.4 自动控制系统运动方程的建立
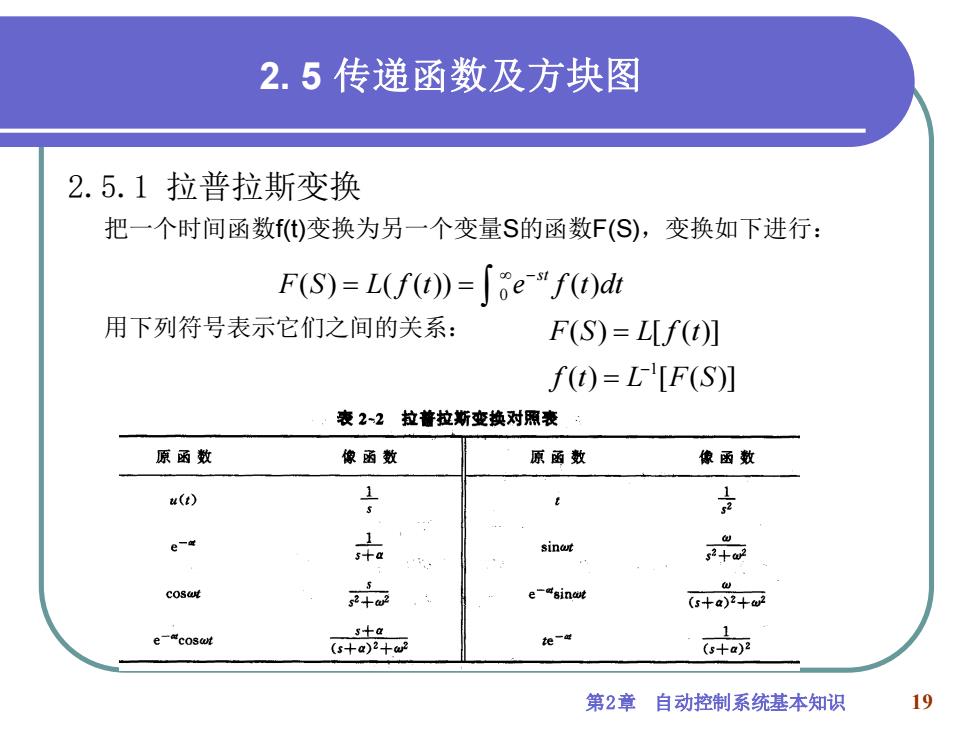
2.5传递函数及方块图 2.5.1拉普拉斯变换 把一个时间函数f)变换为另一个变量S的函数F(S),变换如下进行: F(S)=Lf(t))=[e-"f(t)dt 用下列符号表示它们之间的关系: F(S)=LIf(t)] f(t)=L'[F(S)] 表22拉普拉斯变换对照表 原函数 像函数 原函数 像函数 u(t) 品 c-x 1 sf sinat 2+ coswt 中 e-sinat G+a)2+2 e-coswt (G+a)2+w e一g oi 第2章自动控制系统基本知识 19
第2章 自动控制系统基本知识 19 2. 5 传递函数及方块图 2.5.1 拉普拉斯变换 把一个时间函数f(t)变换为另一个变量S的函数F(S),变换如下进行: 0 ( ) ( ( )) ( ) − = = st F S L f t e f t dt 用下列符号表示它们之间的关系: 1 ( ) [ ( )] ( ) [ ( )] − = = F S L f t f t L F S
2.5传递函数及方块图 2.5.2传递函数 利用微分方程分析自动控制系统的方法称为时域分析: 利用传递函数分析自动控制系统的方法称为频域分析。 传递函数定义: 在零初始条件下,线性常系数系统的输出量的拉普拉斯变换式与输入量的 拉普拉斯变换式之比。 W(S)= Xo(S) X,(S) W(S)为传递函数,X(S)为输出量的拉普拉斯变换式, X(S)为输入量的拉普拉斯变换式 第2章自动控制系统基本知识 20
第2章 自动控制系统基本知识 20 2.5.2 传递函数 利用微分方程分析自动控制系统的方法称为时域分析; 利用传递函数分析自动控制系统的方法称为频域分析。 传递函数定义: 在零初始条件下,线性常系数系统的输出量的拉普拉斯变换式与输入量的 拉普拉斯变换式之比。 0 ( ) ( ) ( ) = i X S W S X S W(S)为传递函数,X 0(S)为输出量的拉普拉斯变换式, X i(S)为输入量的拉普拉斯变换式 2. 5 传递函数及方块图