光电定向实验 实验目的 1、了解单脉冲定向原理。 2、了解四象限探测器的性能。 3、通过该系统直接、间接地测定目标的方向,观测可见光辐射到四象限探测器 上的位置和强度变化。 实验内容 1、测量激光器脉冲驱动信号。 2、测量以四象限探测器做接收器,脉冲光信号的放大信号。 3、通过上位机显示每个象限的光强以及光斑的光心坐标,通过观察光斑在四个 象限的显示情况验证四象限探测器原理。 [实验仪器引 1、光电定向实验系统实验箱 1套 2、20M双踪示波器 1台 3、PC机 1台 实验原理] (八、光电定向及四象限探测器原理 光电定向是指用四象限探测器组成的光学系统来测定二维方向上目标的方 位,其关键器件是四象限探测器。 我们所用四象限光电探测器是将四个性能相同的光电探测器按照直角坐标 排列成四个象限做在同一芯片上,通常称四象限管,如图1所示。四个象限之间 的间隔称为“死区”。在可 光照区 图1四象限探测器示意图 1
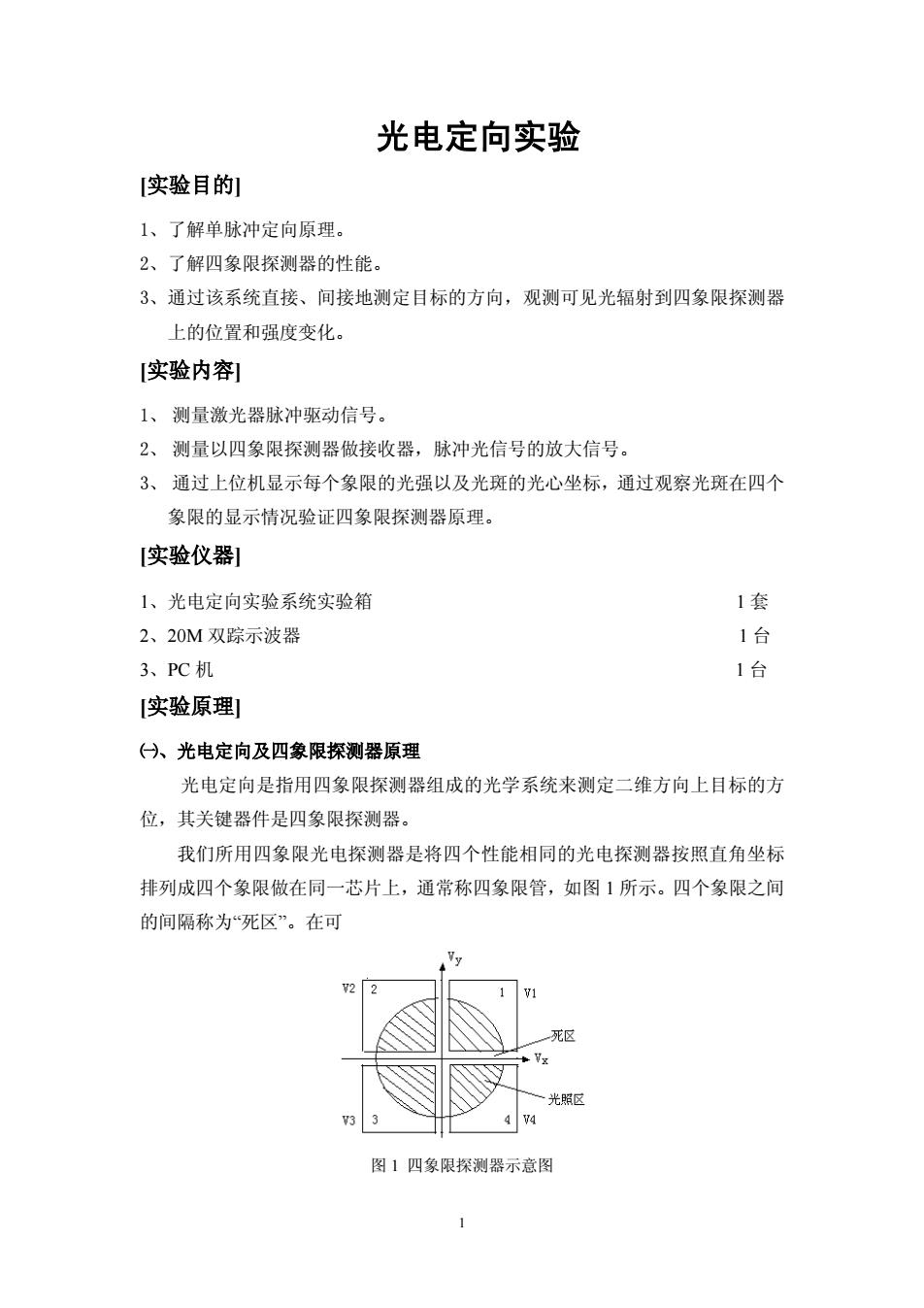
光电定向实验 [实验目的] 1、了解单脉冲定向原理。 2、了解四象限探测器的性能。 3、通过该系统直接、间接地测定目标的方向,观测可见光辐射到四象限探测器 上的位置和强度变化。 [实验内容] 1、 测量激光器脉冲驱动信号。 2、 测量以四象限探测器做接收器,脉冲光信号的放大信号。 3、 通过上位机显示每个象限的光强以及光斑的光心坐标,通过观察光斑在四个 象限的显示情况验证四象限探测器原理。 [实验仪器] 1、光电定向实验系统实验箱 1 套 2、20M 双踪示波器 1 台 3、PC 机 1 台 [实验原理] ㈠、光电定向及四象限探测器原理 光电定向是指用四象限探测器组成的光学系统来测定二维方向上目标的方 位,其关键器件是四象限探测器。 我们所用四象限光电探测器是将四个性能相同的光电探测器按照直角坐标 排列成四个象限做在同一芯片上,通常称四象限管,如图 1 所示。四个象限之间 的间隔称为“死区”。在可 图 1 四象限探测器示意图 1
见光和近红外波段,光电探测器目前广泛采用硅光电池和硅光电二极管。光电探 测器在有光照射时产生电信号。 用四象限光电探测器作为二维方向上目标的方位定向原理如图2所示。 脉冲激光器 四象限探测器 光学成像系丝 图2定向原理示意图 脉冲激光器发出脉冲宽度极窄而功率很高的激光脉冲,照射远处目标,目 标对光脉冲发生漫反射,反射回来的光由光电接收系统接收。 光电接收系统由光学成像系统和四象限探测器组成,如图3所示 A 光学系统 四象限探测 图3光学成像系统和四象限探测器示意图 目标光信号经光学成像系统后在四象限光电探测器上成像。四象限探测器 放在光学系统后焦面附近,光轴通过四象限探测器的十字沟道中心,因四象限探 测器的位置略有离焦,于是接收目标的像为一圆形光斑。当目标成像在光轴上时 圆形光斑中心与四象限探测器中心重合。因四象限探测器中四个探测器件受照的 光斑面积相同,输出相等的脉冲电压。当目标成像不在光轴上时,目标像的圆形 光斑的位置在四象限探测器上相应的有偏移,四个探测器件受照的光斑面积不 同,输出不相等的脉冲电压。对四个探测器输出的信号进行运算处理,就可以知 道目标在直角坐标系X一Y中用电压Vx和Vv表示的方位。 运算电路实现方式有和差式、和差比幅式、对差式和对数相减式。 所谓和差式就是如图4所示先计算探测器件输出信号的和,再计算和的差, 原理如图4所示
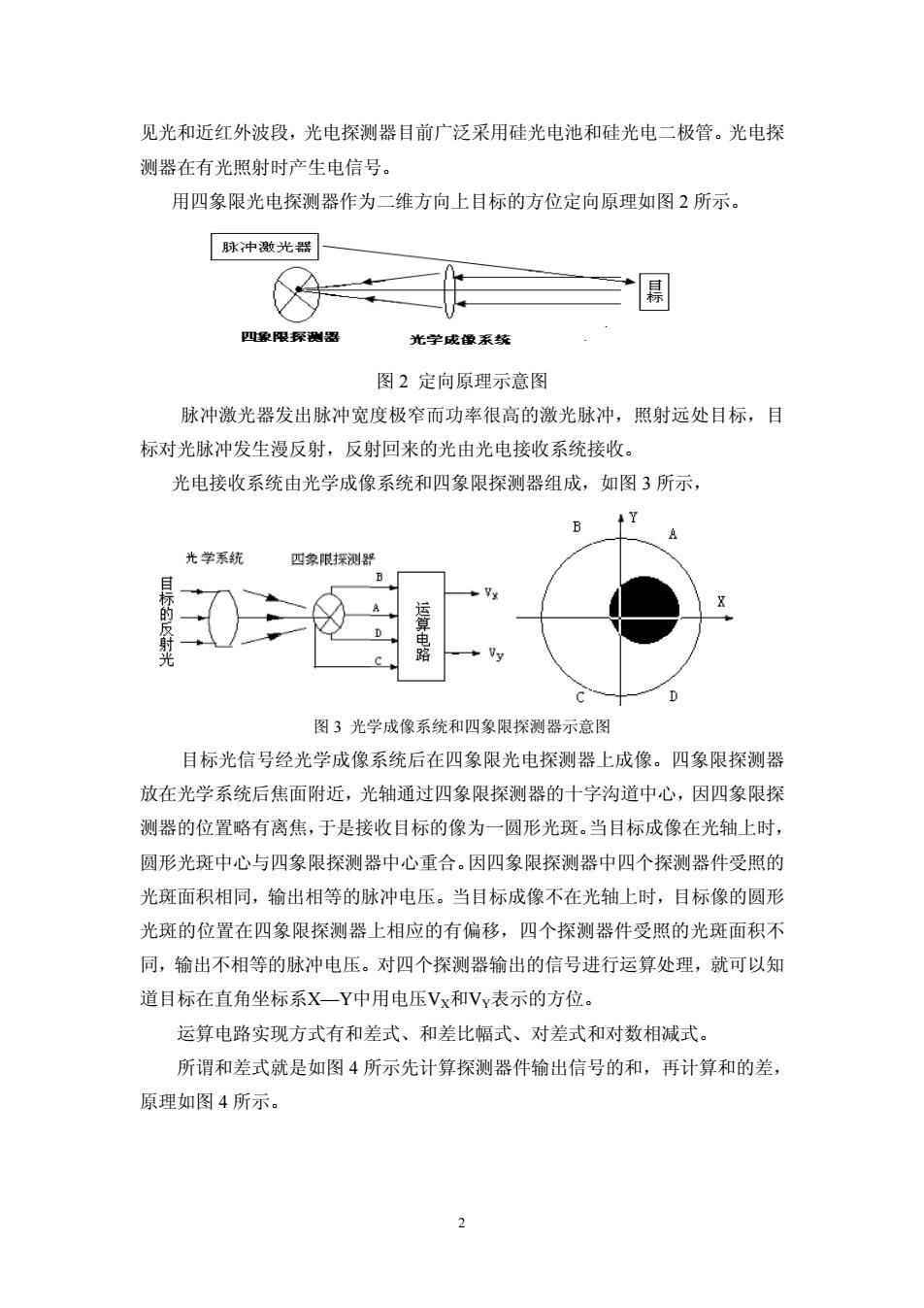
见光和近红外波段,光电探测器目前广泛采用硅光电池和硅光电二极管。光电探 测器在有光照射时产生电信号。 用四象限光电探测器作为二维方向上目标的方位定向原理如图 2 所示。 图 2 定向原理示意图 脉冲激光器发出脉冲宽度极窄而功率很高的激光脉冲,照射远处目标,目 标对光脉冲发生漫反射,反射回来的光由光电接收系统接收。 光电接收系统由光学成像系统和四象限探测器组成,如图 3 所示, 图 3 光学成像系统和四象限探测器示意图 目标光信号经光学成像系统后在四象限光电探测器上成像。四象限探测器 放在光学系统后焦面附近,光轴通过四象限探测器的十字沟道中心,因四象限探 测器的位置略有离焦,于是接收目标的像为一圆形光斑。当目标成像在光轴上时, 圆形光斑中心与四象限探测器中心重合。因四象限探测器中四个探测器件受照的 光斑面积相同,输出相等的脉冲电压。当目标成像不在光轴上时,目标像的圆形 光斑的位置在四象限探测器上相应的有偏移,四个探测器件受照的光斑面积不 同,输出不相等的脉冲电压。对四个探测器输出的信号进行运算处理,就可以知 道目标在直角坐标系X—Y中用电压VX和VY表示的方位。 运算电路实现方式有和差式、和差比幅式、对差式和对数相减式。 所谓和差式就是如图 4 所示先计算探测器件输出信号的和,再计算和的差, 原理如图 4 所示。 2
ae-c网 PH风 D+A a*o)-0+G习- 图4和差式原理示意图 假设光斑得到的辐射是均匀的,每个光电探测器件收到的光功率,从而输 出信号一定与每个探测器件接收到的光斑面积成比。这里以A、B、C、D表示 光电探测器接收到的光斑面积占总光斑面积的百分比,若探测器件的材料是均匀 的,则各象限的光功率信号与各象限的光斑面积成正比,各象限的输出信号也与 各象限的光斑面积成正比,对和差运算,系统输出电压信号为: Vx =KP(A+D)-(B+C) ',=KP(A+B)-(C+D) 对应于光斑圆心坐标 X=KP(A+D)-(B+C)] Y=KP(A+B)-(C+D)] 其中,K为电路放大系数,P为探测器接收的总功率。显见,只要系统确定, 则K、P均是常数,偏离值只与光斑面积的百分比有关:但在实际系统中,P要 随目标距离远近而变化,'x、'并不能代表目标的实际坐标,若采用和差比幅 式就可以解决这个问题,和差比幅式原理如图5所示。 A+田 (A+B)-(C4D) A+B+C+D D-A 图5和差比幅式原理示意图 系统输出电压信号为: V:=k(4+D)-(B+C) A+B+C+D 对应于光斑圆心坐标: 3
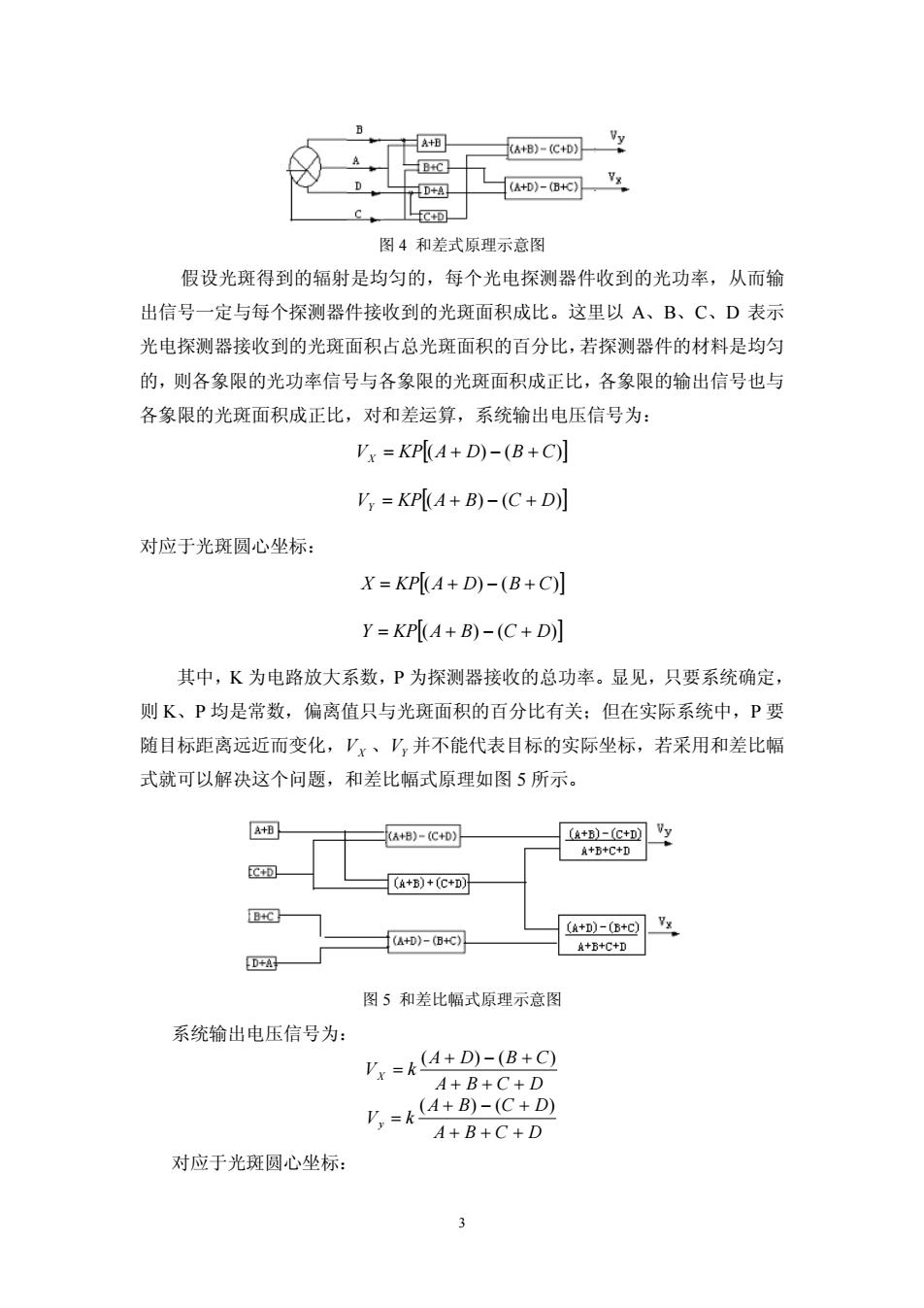
图 4 和差式原理示意图 假设光斑得到的辐射是均匀的,每个光电探测器件收到的光功率,从而输 出信号一定与每个探测器件接收到的光斑面积成比。这里以 A、B、C、D 表示 光电探测器接收到的光斑面积占总光斑面积的百分比,若探测器件的材料是均匀 的,则各象限的光功率信号与各象限的光斑面积成正比,各象限的输出信号也与 各象限的光斑面积成正比,对和差运算,系统输出电压信号为: V KP[(A D) (B C)] X = + − + V KP[(A B) (C D)] Y = + − + 对应于光斑圆心坐标: X = KP[(A + D) − (B + C)] Y = KP[(A + B) − (C + D)] 其中,K 为电路放大系数,P 为探测器接收的总功率。显见,只要系统确定, 则 K、P 均是常数,偏离值只与光斑面积的百分比有关;但在实际系统中,P 要 随目标距离远近而变化, 、 并不能代表目标的实际坐标,若采用和差比幅 式就可以解决这个问题,和差比幅式原理如图 5 所示。 VX VY 图 5 和差比幅式原理示意图 系统输出电压信号为: A B C D A D B C V k X + + + + − + = ( ) ( ) A B C D A B C D V k y + + + + − + = ( ) ( ) 对应于光斑圆心坐标: 3
X=k(4+D)-(B+C) A+B+C+D 可见上式中就不包含了总功率P。 本实验系统采用激光脉冲模拟成像信号直接照射四象限探测器。 日、光电定向实验系统实现原理 光电定向是指用光学系统来测定目标的方位,在实际应用中具有精度高、价 格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电 制导和光电测距等各个技术领域得到了广泛的应用。本实验系统采用650m半 导体激光器作为光源,四象限探测器作为光电探测接收器,实现可以直观、快速 观测定位跟踪目标方位的光电定向装置。 该系统主要由发射部分、光电探测器、信号处理电路、数据采集和软件显示 部分组成。该系统结构框图如图6所示。 信号发生 脉冲发生 650激光器 电路 电路 串口通信 上位机 图6系统结构图 1、激光器发射部分 发射部分主要由信号发生器电路,脉冲发生电路和650nm半导体激光器等 部分组成。 信号发生电路:由NE555构成,产生频率和占空比均可调的方波信号,电 路如图7所示
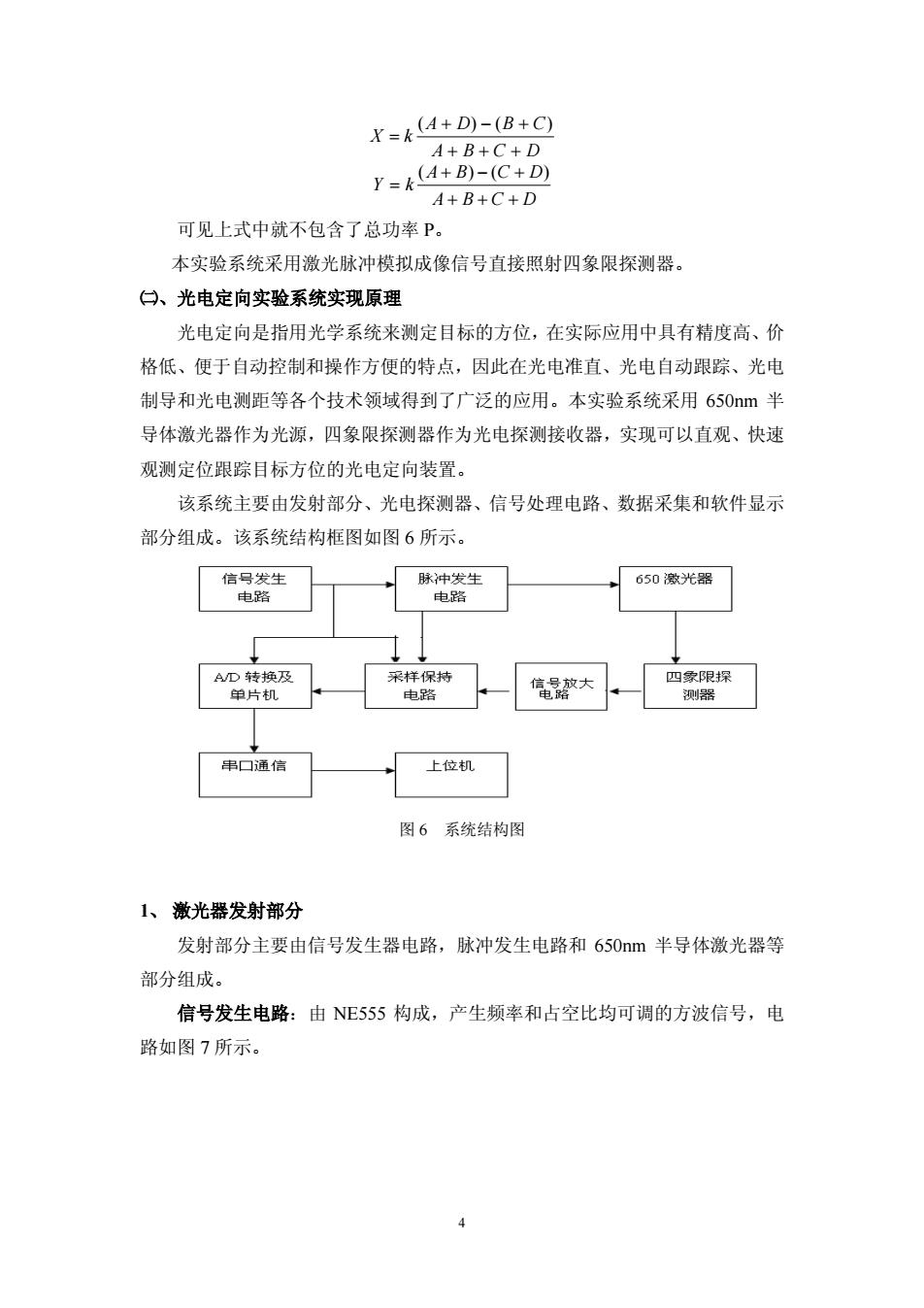
A B C D A D B C X k + + + + − + = ( ) ( ) A B C D A B C D Y k + + + + − + = ( ) ( ) 可见上式中就不包含了总功率 P。 本实验系统采用激光脉冲模拟成像信号直接照射四象限探测器。 ㈡、光电定向实验系统实现原理 光电定向是指用光学系统来测定目标的方位,在实际应用中具有精度高、价 格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电 制导和光电测距等各个技术领域得到了广泛的应用。本实验系统采用 650nm 半 导体激光器作为光源,四象限探测器作为光电探测接收器,实现可以直观、快速 观测定位跟踪目标方位的光电定向装置。 该系统主要由发射部分、光电探测器、信号处理电路、数据采集和软件显示 部分组成。该系统结构框图如图 6 所示。 图 6 系统结构图 1、 激光器发射部分 发射部分主要由信号发生器电路,脉冲发生电路和 650nm 半导体激光器等 部分组成。 信号发生电路:由 NE555 构成,产生频率和占空比均可调的方波信号,电 路如图 7 所示。 4
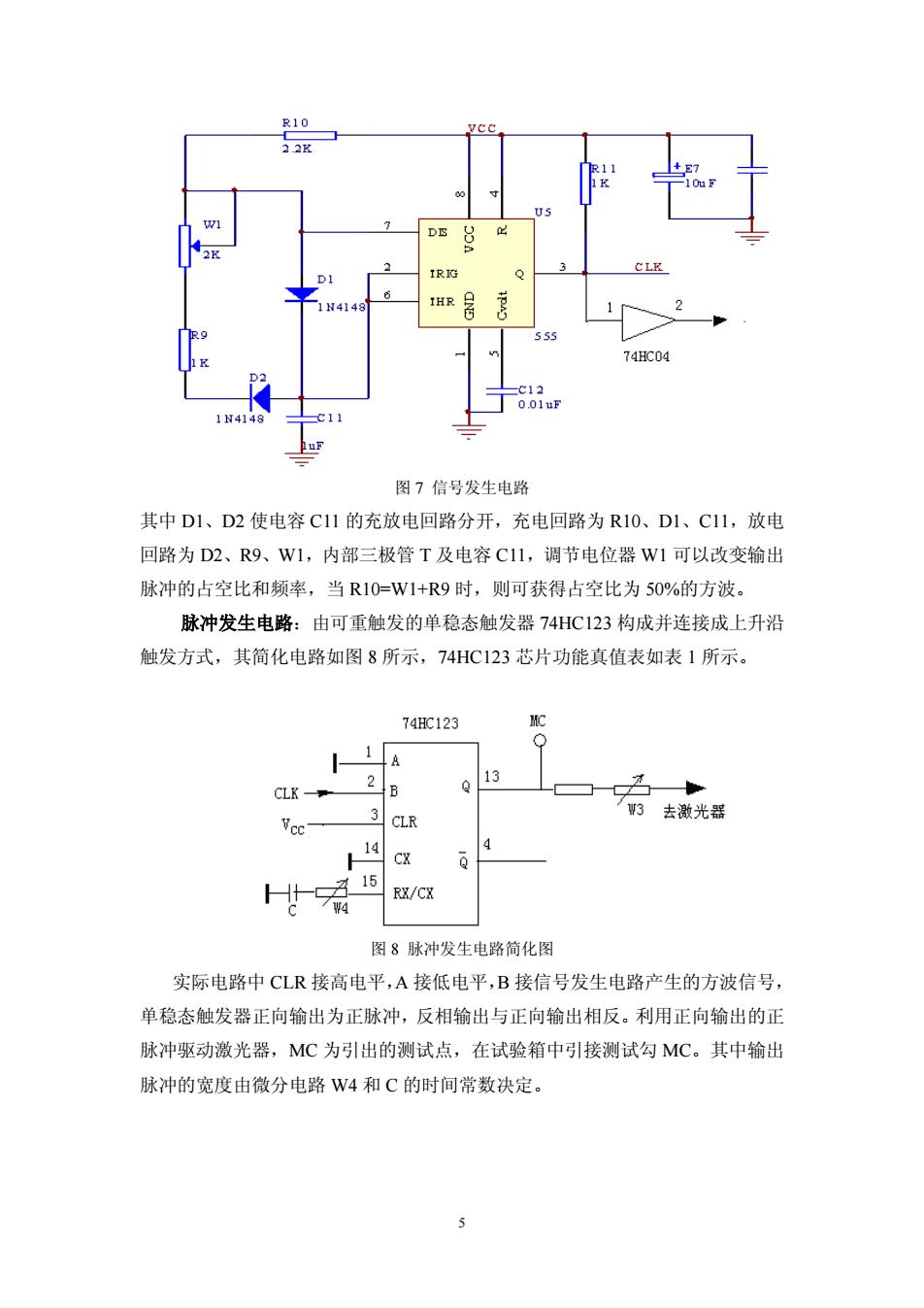
图7信号发生电路 其中D1、D2使电容C11的充放电回路分开,充电回路为R10、D1、C11,放电 回路为D2、R9、W1,内部三极管T及电容C11,调节电位器W1可以改变输出 脉冲的占空比和频率,当R10=W1+R9时,则可获得占空比为50%的方波。 脉冲发生电路:由可重触发的单稳态触发器74HC123构成并连接成上升沿 触发方式,其简化电路如图8所示,74HC123芯片功能真值表如表1所示。 74H0123 CLK- 13 B CLR 3去激光器 15 R咫/C 图8脉冲发生电路简化图 实际电路中CLR接高电平,A接低电平,B接信号发生电路产生的方波信号 单稳态触发器正向输出为正脉冲,反相输出与正向输出相反。利用正向输出的正 脉冲驱动激光器,MC为引出的测试点,在试验箱中引接测试勾MC。其中输出 脉冲的宽度由微分电路W4和C的时间常数决定
图 7 信号发生电路 其中 D1、D2 使电容 C11 的充放电回路分开,充电回路为 R10、D1、C11,放电 回路为 D2、R9、W1,内部三极管 T 及电容 C11,调节电位器 W1 可以改变输出 脉冲的占空比和频率,当 R10=W1+R9 时,则可获得占空比为 50%的方波。 脉冲发生电路:由可重触发的单稳态触发器 74HC123 构成并连接成上升沿 触发方式,其简化电路如图 8 所示,74HC123 芯片功能真值表如表 1 所示。 图 8 脉冲发生电路简化图 实际电路中 CLR 接高电平,A 接低电平,B 接信号发生电路产生的方波信号, 单稳态触发器正向输出为正脉冲,反相输出与正向输出相反。利用正向输出的正 脉冲驱动激光器,MC 为引出的测试点,在试验箱中引接测试勾 MC。其中输出 脉冲的宽度由微分电路 W4 和 C 的时间常数决定。 5