实验5气垫法测定物体的转动惯量 在很多情况下,物体的形状和大小对物体的运动规律起着重要作用,例如宏观物体的 转动,以及微观粒子如分子、原子的转动甚至电子的自转等等。在这种情况下,物体就不 能再被当作质点看待,而必须考虑物体的大小和形状,即把物体视为刚体。 在研究刚体的转动问题时,首先遇到的困难就是磨擦力矩的存在:本仪器由于采用了 气垫悬浮与气垫滑轮相结合以及气流定轴等独特设计,故该装置所有转动件间的磨擦均达 到可以忽略的程度。用它可以测量多种物体的转动惯量,能够完成转动定律、角动量守恒 定律及平行轴定理等许多实验。本实验利用气垫转动惯量测定仪测定刚体在力矩作用下转 动的角加速度,来验证刚体转动定律。 实验目的和学习要求 1.验证刚体转动定律,测定刚体绕固定轴的转动惯量 2.验证刚体转动惯量的平行轴定理: 3.验证角动量守恒定律: 4.用对称测量法消除零转引起的系统误差。 实验仪器 气垫转动惯量测定仪,专用CH山型数 字毫秒计,DC型微音气泵,砝码组(2× 1g,4×2g,及2×5g),镊子及细线等。 实验原理 1.验证刚体转动定律 转动定律指出:绕固定轴转动的刚体 其所受外力矩N与该力矩作用下产生的角 加速度成正比,即: N=la (5-1) 10 比例系数为刚体绕定轴转动的转动惯 e 量,单位:kgm。当刚体的转轴被确定 1一气室:2-定盘:3-动盘: 4一细线:5一气垫滑轮: 后,其转动惯量为一常数。如图(5-1)所 6一砝码桶:7一遮光板: 示(参见附录),由于砝码m的重力作用, 8一光电门:9-定点发放开关: 使绕在动盘圆柱上的软细线产生张力T, 10一进气口:11一地脚螺丝 在张力作用下,动盘将产生一转动力矩N。 假定动盘圆柱直径为D,则当气动阻力可忽 略时,外 图51气垫转动惯量测定仪
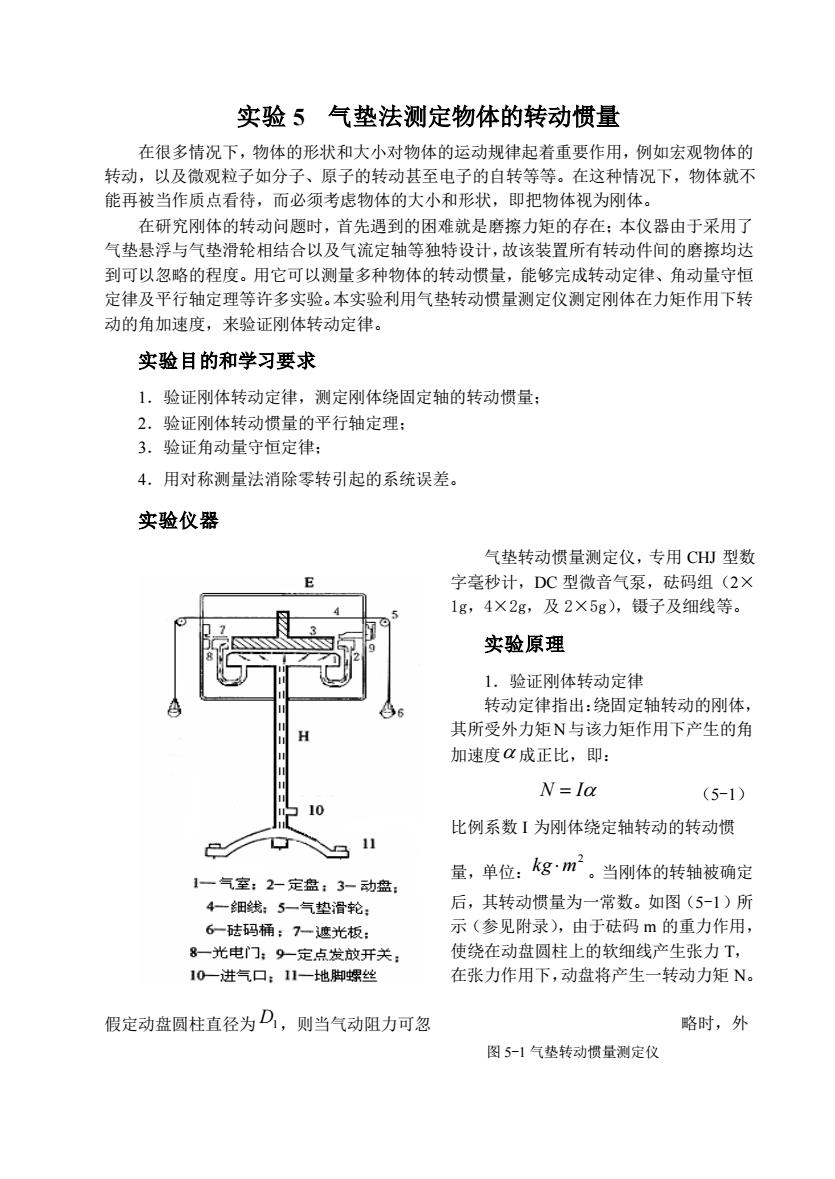
实验 5 气垫法测定物体的转动惯量 在很多情况下,物体的形状和大小对物体的运动规律起着重要作用,例如宏观物体的 转动,以及微观粒子如分子、原子的转动甚至电子的自转等等。在这种情况下,物体就不 能再被当作质点看待,而必须考虑物体的大小和形状,即把物体视为刚体。 在研究刚体的转动问题时,首先遇到的困难就是磨擦力矩的存在;本仪器由于采用了 气垫悬浮与气垫滑轮相结合以及气流定轴等独特设计,故该装置所有转动件间的磨擦均达 到可以忽略的程度。用它可以测量多种物体的转动惯量,能够完成转动定律、角动量守恒 定律及平行轴定理等许多实验。本实验利用气垫转动惯量测定仪测定刚体在力矩作用下转 动的角加速度,来验证刚体转动定律。 实验目的和学习要求 1.验证刚体转动定律,测定刚体绕固定轴的转动惯量; 2.验证刚体转动惯量的平行轴定理; 3.验证角动量守恒定律; 4.用对称测量法消除零转引起的系统误差。 实验仪器 气垫转动惯量测定仪,专用 CHJ 型数 字毫秒计,DC 型微音气泵,砝码组(2× 1g,4×2g,及 2×5g),镊子及细线等。 实验原理 1.验证刚体转动定律 转动定律指出:绕固定轴转动的刚体, 其所受外力矩N与该力矩作用下产生的角 加速度 成正比,即: N = I (5-1) 比例系数 I 为刚体绕定轴转动的转动惯 量,单位: 2 kg m 。当刚体的转轴被确定 后,其转动惯量为一常数。如图(5-1)所 示(参见附录),由于砝码 m 的重力作用, 使绕在动盘圆柱上的软细线产生张力 T, 在张力作用下,动盘将产生一转动力矩 N。 假定动盘圆柱直径为 D1 ,则当气动阻力可忽 略时,外 图 5-1 气垫转动惯量测定仪
力矩:N=TD (5-2) 在力矩N的作用下,动盘将作匀角加速运动,砝码m随之下落,由牛顿第二定律可 知,张力T与砝码下落的角加速度a=aD/2之间满足如下关系: T=g-a)=g-2) (5-3) 将式(5-2)及(5-3)代入式(5-1),有: N=m(g-=a (5-4) 若式(5-4)得证,则刚体转动定律得以验证。当m及D与动盘质量及半径相比均很小 时,有a<<g,于是式(5-4)变为: N=Ia≈ngD (5-5) 设动盘转动的初角速度为0,其继续转过日=2π及日,=4红角度所用的时间分别 为及2,则由刚体运动学公式可得 01=2π=0l1+am7/2 (5-6) 02=4π=042+am/2 (5-7) 由式(5-6)和(5-7)中消去0,即可求出动盘在力矩N的作用下,绕固定轴转动的角 a=4r2-1/4) 加速度: 2-41 (5-8) 改变砝码质量m,测出动盘在不同外力矩N,=m,8D下绕定轴转动的角加速度4,作 N一“曲线,若该曲线为一直线,则证明刚体转动定律成立,且直线的斜率即为刚体绕固定 轴的转动惯量1。 2.验证刚体转动惯量的平行轴定理 刚体对任一转动轴的转动惯量1等于刚体对通过其质心且平行于该轴的转动惯量'。 加上刚体的质量M乘以两平行轴间距离D的平 方。即: I=1。+MD (5-9) 这就是刚体转动惯量的平行轴定理。式(5-9)表 动盘 明,刚体的转动惯量!与其质心到转轴距离的平 图5-2动盘及圆铜柱
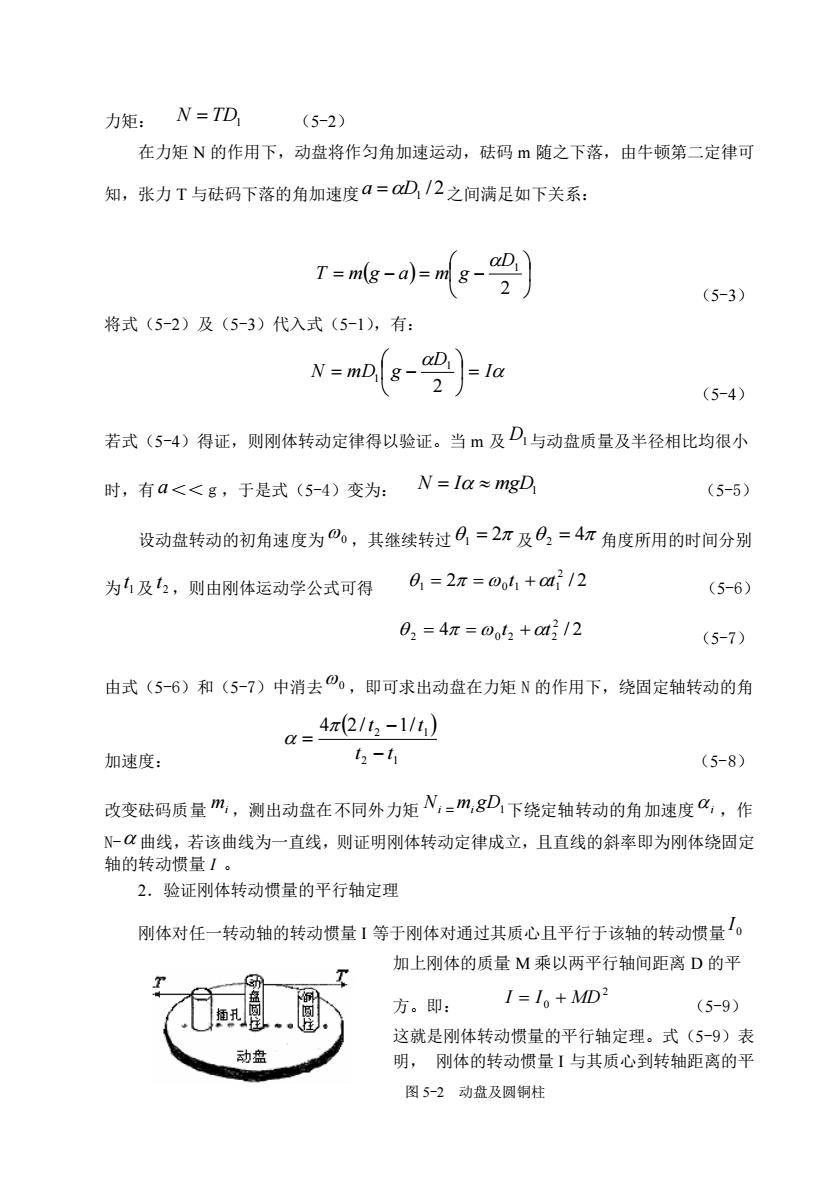
力矩: N = TD1 (5-2) 在力矩 N 的作用下,动盘将作匀角加速运动,砝码 m 随之下落,由牛顿第二定律可 知,张力 T 与砝码下落的角加速度 a =D1 / 2 之间满足如下关系: ( ) = − = − 2 D1 T m g a m g (5-3) 将式(5-2)及(5-3)代入式(5-1),有: I D N mD g = = − 2 1 1 (5-4) 若式(5-4)得证,则刚体转动定律得以验证。当 m 及 D1 与动盘质量及半径相比均很小 时,有 a <<g,于是式(5-4)变为: mgD1 N = I (5-5) 设动盘转动的初角速度为 0 ,其继续转过 1 = 2 及 2 = 4 角度所用的时间分别 为 1 t 及 2 t ,则由刚体运动学公式可得 2 / 2 2 1 0 1 1 = = t +t (5-6) 4 / 2 2 2 0 2 2 = = t +t (5-7) 由式(5-6)和(5-7)中消去 0 ,即可求出动盘在力矩 N 的作用下,绕固定轴转动的角 加速度: ( ) 2 1 2 1 4 2/ 1/ t t t t − − = (5-8) 改变砝码质量 mi ,测出动盘在不同外力矩 Ni = mi gD1 下绕定轴转动的角加速度 i ,作 N- 曲线,若该曲线为一直线,则证明刚体转动定律成立,且直线的斜率即为刚体绕固定 轴的转动惯量 I 。 2.验证刚体转动惯量的平行轴定理 刚体对任一转动轴的转动惯量 I 等于刚体对通过其质心且平行于该轴的转动惯量 0 I 加上刚体的质量 M 乘以两平行轴间距离 D 的平 方。即: 2 I = I 0 + MD (5-9) 这就是刚体转动惯量的平行轴定理。式(5-9)表 明, 刚体的转动惯量 I 与其质心到转轴距离的平 图 5-2 动盘及圆铜柱
方D成线性关系。当D不变时I亦不变。 (1)改变D,考察1与D的关系将质量均为M的两个铜圆柱对称地置于动盘圆柱 两侧的插孔上,如图5-2所示。设圆柱绕自身对称轴的转动惯量为'。,动盘绕自身对称 轴的转动惯量为'。,两轴间距离为D,整体系统的转动惯量为1,则据平行轴定理有: I-1。+2L.+MD') (5-10) 1=mgD mD 又由式(5-4)可知,整体系统的转动惯量为: 2 (5-11) 式(5-11)中,D1表示动盘圆柱直径:(表示砝码桶及砝码质量为m时系统转动的角加 速度,且由式(5-7)可知: 12-41 4-4) a4x2/2-1/44z24,-) (5-12) 式(5-12)中,4及'2分别表示系统旋转一周及两周所用的时间。将式(5-11)代入式(5-10), 1=4+BD 整理后得: (5-13) 若在直角坐标系内1/a~D'关系为一条直线,则式(5-13)亦即式(5-10)成立,刚体 转动惯量的平行轴定理得以验证。且直线的截距A和斜率B分别为: A=6+2+ D mgD 2g (5-14) 2M 及 B-mgD (5-15) (2)D不变,只改变刚体的方位 将质量均为M'的两个长方体铝块对 (1) (2) (3) 称地置于动盘圆柱两侧的插孔上,在 保持铝块质心与动盘中心轴的距离D'恒定的情 图53动盘及铝块 况下,改变铝块方位,如图5-3所示
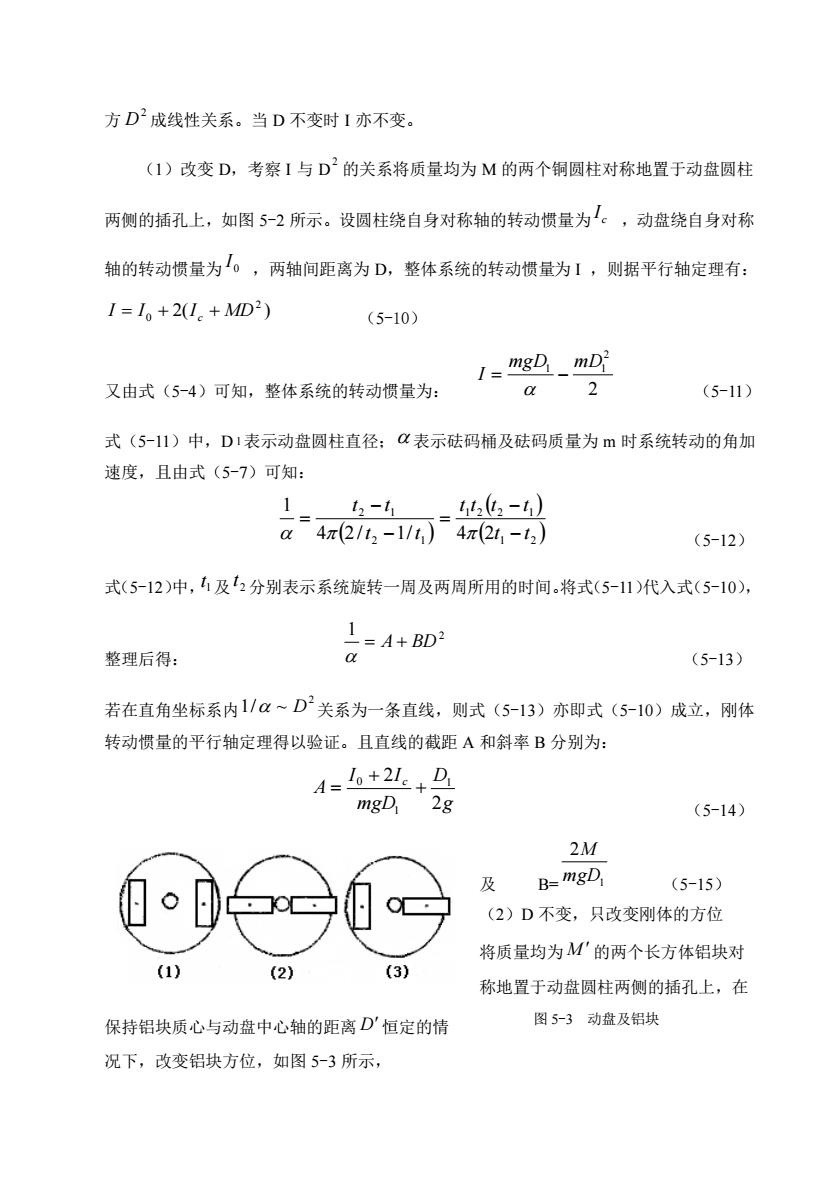
方 2 D 成线性关系。当 D 不变时 I 亦不变。 (1)改变 D,考察 I 与 D 2 的关系将质量均为 M 的两个铜圆柱对称地置于动盘圆柱 两侧的插孔上,如图 5-2 所示。设圆柱绕自身对称轴的转动惯量为 c I ,动盘绕自身对称 轴的转动惯量为 0 I ,两轴间距离为 D,整体系统的转动惯量为 I ,则据平行轴定理有: 2( ) 2 I = I 0 + I c + MD (5-10) 又由式(5-4)可知,整体系统的转动惯量为: 2 2 mgD1 mD1 I = − (5-11) 式(5-11)中,D 1 表示动盘圆柱直径; 表示砝码桶及砝码质量为 m 时系统转动的角加 速度,且由式(5-7)可知: ( ) ( ) ( ) 1 2 1 2 2 1 2 1 2 1 4 2/ 1/ 4 2 1 t t t t t t t t t t − − = − − = (5-12) 式(5-12)中, 1 t 及 2 t 分别表示系统旋转一周及两周所用的时间。将式(5-11)代入式(5-10), 整理后得: 1 2 = A + BD (5-13) 若在直角坐标系内 2 1/ ~ D 关系为一条直线,则式(5-13)亦即式(5-10)成立,刚体 转动惯量的平行轴定理得以验证。且直线的截距 A 和斜率 B 分别为: g D mgD I I A c 2 2 1 1 0 + + = (5-14) 及 B= 1 2 mgD M (5-15) (2)D 不变,只改变刚体的方位 将质量均为 M 的两个长方体铝块对 称地置于动盘圆柱两侧的插孔上,在 保持铝块质心与动盘中心轴的距离 D 恒定的情 况下,改变铝块方位,如图 5-3 所示, 图 5-3 动盘及铝块
分别使两铝块长轴(1)平行、(2)垂直及(3)重合等。若在上述情况下,测得系统转动 一周及两周所需要的时间对应相等,亦即角加速度相等,则说明:当转轴确定后,刚体的 转动惯量 =h=+MD 2 (5-16) 只与其通过质心且平行于固定轴的转动惯量:及平行轴间距D'有关,而与刚体相对于自 身转轴转过的角度无关。它又从另一个侧面证实了平行轴定理。式(5-16)中,若测定了 动盘及整体系统的转动惯量'0及,则可求出铝块的转动惯量'。 3.验证角动量守恒定律 质点绕定轴转动的角动量L定义为其矢径r与其动量P的矢乘积,即:L=Xp。由 此可以证明,刚体绕固定轴转动的角动量,等于刚体相对于该轴的转动惯量Ⅰ乘以刚体转 动的角速度0,且其方向与角速度的方向相同,以数值表示时,为: L-@ (5-17) 当刚体在外力矩N的作用下,以角加速度a=dO/h转动时,即服从转动定律。显然, 描述刚体转动定律的式(5-1)即为式(5-17)对时间t的微商: N=dL/dh=I.(doldt) (5-18) 而当合外力矩为零时,角动量不随时间变化,即: L=I0=恒量 (5-19) 式(5-19)即角动量守恒定律。 角动量的概念及角动量守恒定律在原子物理、量 子物理及基本粒子的研究中都有很重要的作用。本实 验就是在气垫转动惯量测定仪上验证角动量守恒定 1一压缩空气:2-光电门: 律。将气垫转动惯量测定仪主体(图5-1)去掉动盘、 2一挡光板: 4定位板 细线及砝码桶,并与其附件(4)一起装配如图5-4所 5一固定板:6一圆柱式定位器 示。提起细尼龙绳,使金属球与凹盘脱离并被圆柱式 1一尼龙线: 8一金属球: 定位器嵌住,保持角速度为零。若某时刻使金属球轻 9一凹盘: 10一定位开关 缓地对心落于正以 图5-4气垫转盘与附件(4)装配 角速度)旋转的凹 盘上,二者合为一体,并以另一角速度2旋转,设凹盘与金属球绕其自身对称轴的转动 惯量分别为及2,则因合外力矩为零而满足角动量守恒定律,即:
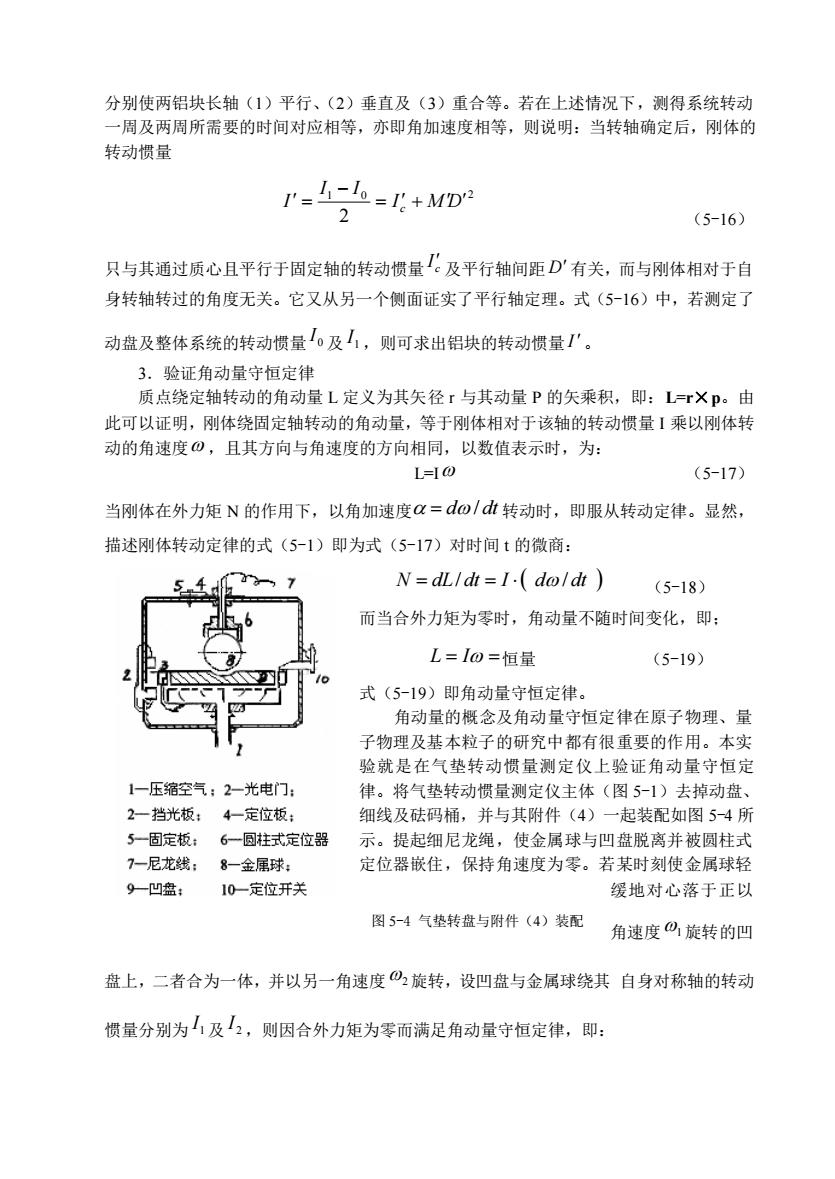
分别使两铝块长轴(1)平行、(2)垂直及(3)重合等。若在上述情况下,测得系统转动 一周及两周所需要的时间对应相等,亦即角加速度相等,则说明:当转轴确定后,刚体的 转动惯量 1 0 2 2 I M D I I I c = + − = (5-16) 只与其通过质心且平行于固定轴的转动惯量 c I 及平行轴间距 D 有关,而与刚体相对于自 身转轴转过的角度无关。它又从另一个侧面证实了平行轴定理。式(5-16)中,若测定了 动盘及整体系统的转动惯量 0 I 及 1 I ,则可求出铝块的转动惯量 I。 3.验证角动量守恒定律 质点绕定轴转动的角动量 L 定义为其矢径 r 与其动量 P 的矢乘积,即:L=r×p。由 此可以证明,刚体绕固定轴转动的角动量,等于刚体相对于该轴的转动惯量 I 乘以刚体转 动的角速度 ,且其方向与角速度的方向相同,以数值表示时,为: L=I (5-17) 当刚体在外力矩 N 的作用下,以角加速度 = d/ dt 转动时,即服从转动定律。显然, 描述刚体转动定律的式(5-1)即为式(5-17)对时间 t 的微商: N = dL/ dt = I ( d / dt ) (5-18) 而当合外力矩为零时,角动量不随时间变化,即; L = I = 恒量 (5-19) 式(5-19)即角动量守恒定律。 角动量的概念及角动量守恒定律在原子物理、量 子物理及基本粒子的研究中都有很重要的作用。本实 验就是在气垫转动惯量测定仪上验证角动量守恒定 律。将气垫转动惯量测定仪主体(图 5-1)去掉动盘、 细线及砝码桶,并与其附件(4)一起装配如图 5-4 所 示。提起细尼龙绳,使金属球与凹盘脱离并被圆柱式 定位器嵌住,保持角速度为零。若某时刻使金属球轻 缓地对心落于正以 角速度 1 旋转的凹 盘上,二者合为一体,并以另一角速度 2 旋转,设凹盘与金属球绕其 自身对称轴的转动 惯量分别为 1 I 及 2 I ,则因合外力矩为零而满足角动量守恒定律,即: 图 5-4 气垫转盘与附件(4)装配
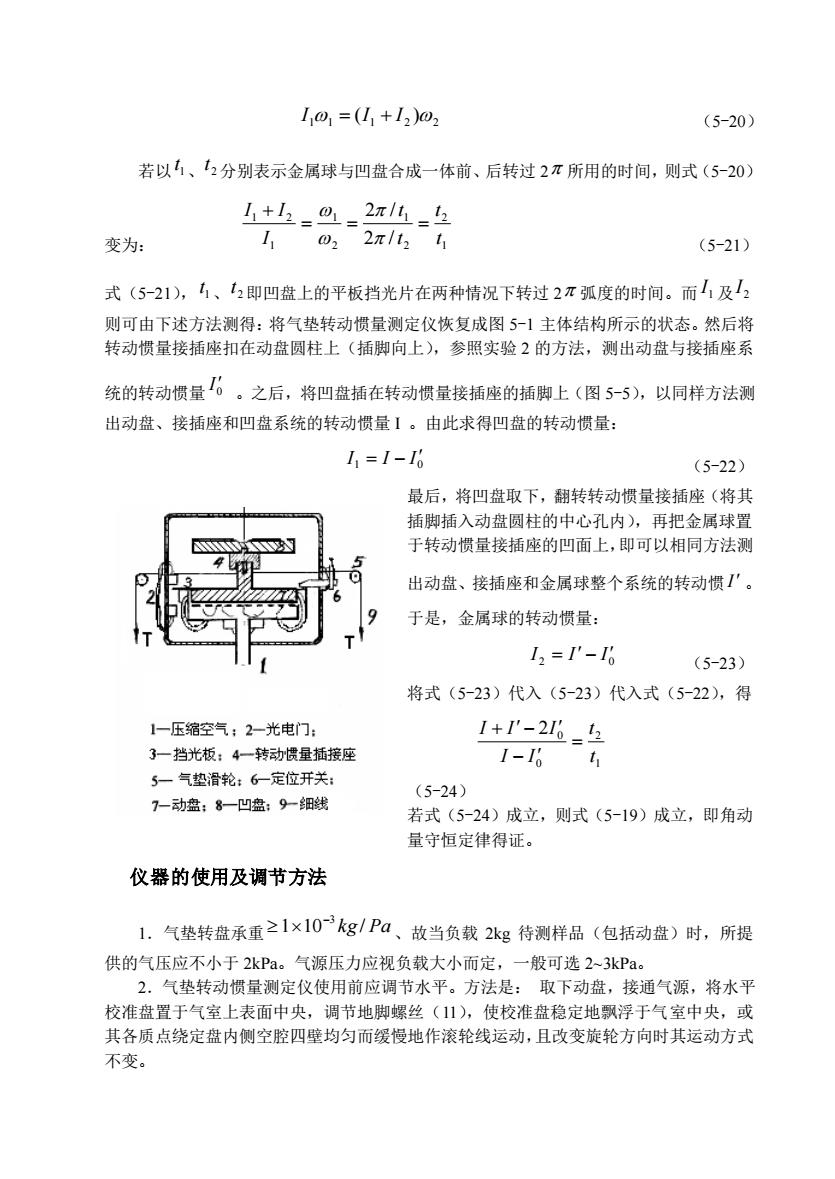
I0,=(41+12)0 (5-20) 若以4、52分别表示金属球与凹盘合成一体前、后转过2π所用的时间,则式(5-20) 1+12-01-2π/h-2 变为: 1022π/1341 (5-21) 式(5-21),4、12即凹盘上的平板挡光片在两种情况下转过2π弧度的时间。而I1及'2 则可由下述方法测得:将气垫转动惯量测定仪恢复成图5-1主体结构所示的状态。然后将 转动惯量接插座扣在动盘圆柱上(插脚向上),参照实验2的方法,测出动盘与接插座系 统的转动惯量6。之后,将凹盘插在转动惯量接插座的插脚上(图5-5),以同样方法测 出动盘、接插座和凹盘系统的转动惯量【。由此求得凹盘的转动惯量: 1=1-16 (5-22) 最后,将凹盘取下,翻转转动惯量接插座(将其 插脚插入动盘圆柱的中心孔内),再把金属球置 于转动惯量接插座的凹面上,即可以相同方法测 出动盘、接插座和金属球整个系统的转动惯'。 于是,金属球的转动惯量: L,='-I6 (5-23) 将式(5-23)代入(5-23)代入式(5-22),得 1一压缩空气:2-光电门: 1+1r-2- 3一挡光板:4一转动惯量插接座 1-6 5一气垫滑轮:6一定位开关 7-动盘:8一凹盘:9细线 (5-24) 若式(5-24)成立,则式(5-19)成立,即角动 量守恒定律得证。 仪器的使用及调节方法 1.气垫转盘承重21×10kg/P口、故当负载2kg待测样品(包括动盘)时,所提 供的气压应不小于2kPa。气源压力应视负载大小而定,一般可选2~3kPa。 2.气垫转动惯量测定仪使用前应调节水平。方法是:取下动盘,接通气源,将水平 校准盘置于气室上表面中央,调节地脚螺丝(11),使校准盘稳定地飘浮于气室中央,或 其各质点绕定盘内侧空腔四壁均匀而缓慢地作滚轮线运动,且改变旋轮方向时其运动方式 不变
1 1 1 2 2 I = (I + I ) (5-20) 若以 1 t 、 2 t 分别表示金属球与凹盘合成一体前、后转过 2 所用的时间,则式(5-20) 变为: 1 2 2 1 2 1 1 1 2 2 / 2 / t t t t I I I = = = + (5-21) 式(5-21), 1 t 、 2 t 即凹盘上的平板挡光片在两种情况下转过 2 弧度的时间。而 1 I 及 2 I 则可由下述方法测得:将气垫转动惯量测定仪恢复成图 5-1 主体结构所示的状态。然后将 转动惯量接插座扣在动盘圆柱上(插脚向上),参照实验 2 的方法,测出动盘与接插座系 统的转动惯量 0 I 。之后,将凹盘插在转动惯量接插座的插脚上(图 5-5),以同样方法测 出动盘、接插座和凹盘系统的转动惯量 I 。由此求得凹盘的转动惯量: 1 0 I = I − I (5-22) 最后,将凹盘取下,翻转转动惯量接插座(将其 插脚插入动盘圆柱的中心孔内),再把金属球置 于转动惯量接插座的凹面上,即可以相同方法测 出动盘、接插座和金属球整个系统的转动惯 I 。 于是,金属球的转动惯量: 2 0 I = I − I (5-23) 将式(5-23)代入(5-23)代入式(5-22),得 1 2 0 2 0 t t I I I I I = − + − (5-24) 若式(5-24)成立,则式(5-19)成立,即角动 量守恒定律得证。 仪器的使用及调节方法 1.气垫转盘承重 1 10 kg / Pa −3 、故当负载 2kg 待测样品(包括动盘)时,所提 供的气压应不小于 2kPa。气源压力应视负载大小而定,一般可选 2~3kPa。 2.气垫转动惯量测定仪使用前应调节水平。方法是: 取下动盘,接通气源,将水平 校准盘置于气室上表面中央,调节地脚螺丝(11),使校准盘稳定地飘浮于气室中央,或 其各质点绕定盘内侧空腔四壁均匀而缓慢地作滚轮线运动,且改变旋轮方向时其运动方式 不变