第四章机械振动 引言: 1.振动的概念 (1)机械振动 物体在一定的位置附近所作的来回往复的运动称为机械根动。如:摆、发声体等。 (2)广义振动概念 凡是描写运动状态的物理量,在某一数值附近作周期性的变化,都叫做振动。 例如:交流电压、电流的变化、无线电波电磁场的变化等等。 2.本章内容 简谐振动、阻尼振动、受迫振动*、共振*等。 4.1简谐振动的动力学特征 4.1.1弹簧振子模型 1.简谐振动的概念 物体运动时,如果离开平衡位置的位移(或角位移)按余 弦函数(或正弦函数)的规律随时间变化,这种运动就叫简诰 jmo 振动。 2.简谐振动及其表达式(运动学方程) 简谐振动的运动方程可写为: x=Acos+): 3.简谐振动物体的速度和加速度 对运动方程求导可得到任意时刻物体振动的速度和加速 度: (1)v==-a4sin@1+p)=.coso1+p+/2, 式中:=a4,a.=a2A,a=-0x 图141简诺振 4.1.2.微振动的简谐近似
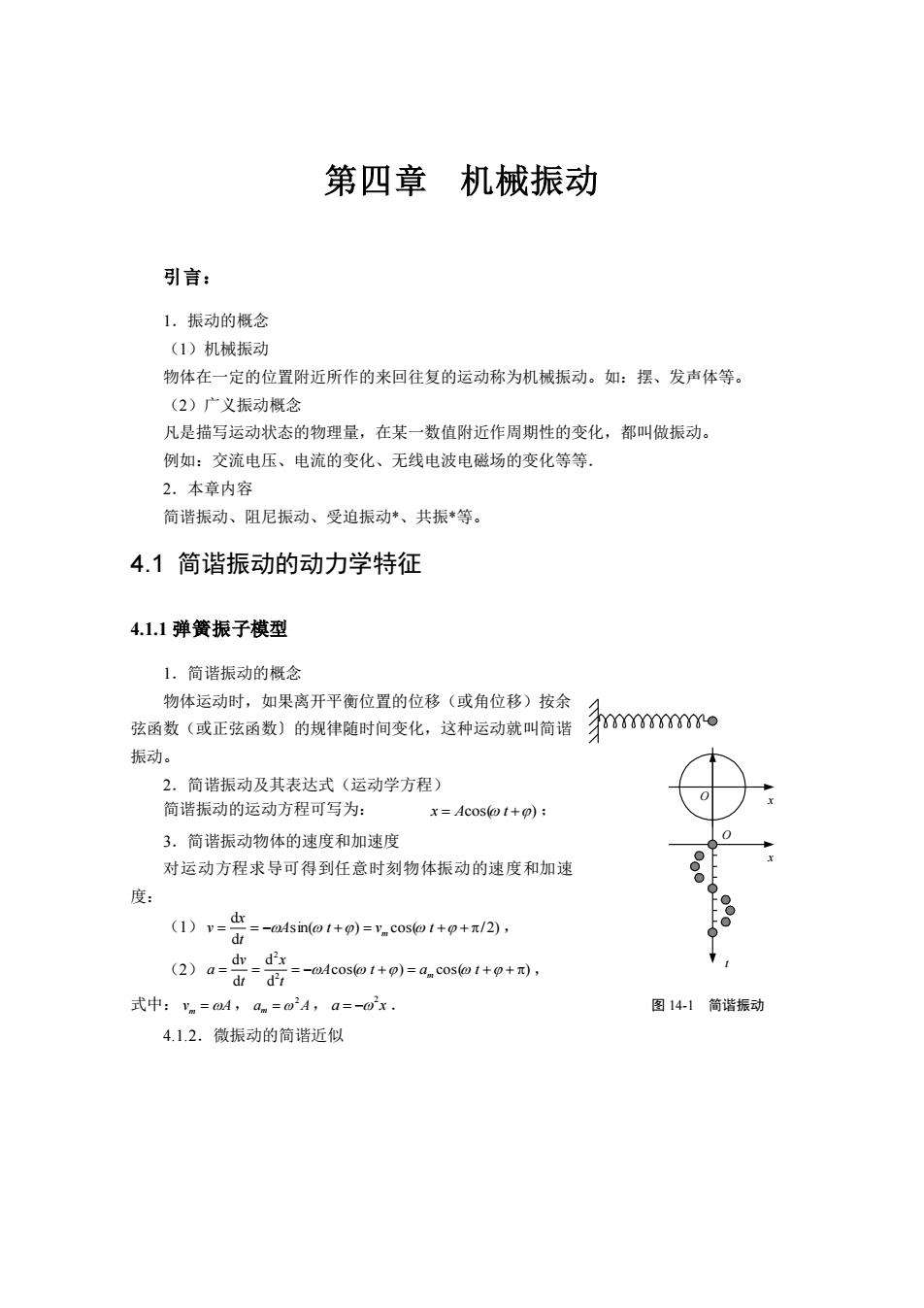
第四章 机械振动 引言: 1.振动的概念 (1)机械振动 物体在一定的位置附近所作的来回往复的运动称为机械振动。如:摆、发声体等。 (2)广义振动概念 凡是描写运动状态的物理量,在某一数值附近作周期性的变化,都叫做振动。 例如:交流电压、电流的变化、无线电波电磁场的变化等等. 2.本章内容 简谐振动、阻尼振动、受迫振动*、共振*等。 4.1 简谐振动的动力学特征 4.1.1 弹簧振子模型 1.简谐振动的概念 物体运动时,如果离开平衡位置的位移(或角位移)按余 弦函数(或正弦函数〕的规律随时间变化,这种运动就叫简谐 振动。 2.简谐振动及其表达式(运动学方程) 简谐振动的运动方程可写为: x = Acos( t +) ; 3.简谐振动物体的速度和加速度 对运动方程求导可得到任意时刻物体振动的速度和加速 度: (1) sin( ) cos( / 2) d d = = −A t + = v t + + t x v m , (2) cos( ) cos( ) d d d d 2 2 = = = −A t + = a t + + t x t v a m , 式中: vm = A, am A 2 = , a x 2 = − . 图 14-1 简谐振动 4.1.2.微振动的简谐近似 t x x O O

1、单摆 如图184所示,单摆在小角度摆动时,重力矩作为回复力矩,其大小为mgsn0=g8 由转动定律M=的,则地=-0,又J=m,则=-0,。=民, 【例3】重力加速度变化时,单摆的周期也变化,dTT与dgg之间的关系是 【分桥1T25,则2,g-g 图18-4 2、复摆 一个可绕固定轴摆动的刚体称为复摆 刚体的质心为C,对过0点的转轴的转动惯量为人O、C两点间距离的距离为1。 据转动定律,得 b 0i2g-= 若角度较小时 b Origm- 。0=68+g 1 即 fun 例152一质量为m的平底船,其平均水平截面积为S,吃水深度为,如不计水的阻力 求此船在竖直方向的振动周期。 解:船静止时浮力与重力平衡, ohSg =mg 7☑片 船在任一位置时,以水面为坐标原点,竖直向下的坐标轴为y轴,船的位移用y表示 船的位移为y时船所受合力为: f=-(h+y)pSg+mg=-ypSg 船在竖直方向作简谐振动,其角频率和周期为: 鹰 T2=2% m .m=pSh, :.T=2K18
2 1、 单摆 如图 18-4 所示,单摆在小角度摆动时,重力矩作为回复力矩,其大小为 mglsin mgl , 由转动定律 2 2 d d t M J = ,则 J mgl t J = − 2 2 d d ,又 2 J = ml ,则 l g t = − 2 2 d d , l g = . 【例 3】 重力加速度变化时,单摆的周期也变化,dT/T 与 dg/g 之间的关系是_. 【分析】 g l T = 2 ,则 g g g l T )d 2 1 d = 2 (− , g g T T d ) 2 1 ( d = − . 图 18-4 2、复摆 一个可绕固定轴摆动的刚体称为复摆。 刚体的质心为 C, 对过 O 点的转轴的转动惯量为 J, O、C 两点间距离的距离为 h。 据转动定律,得 若 角度较小时 即 例 15-2 一质量为 m 的平底船,其平均水平截面积为 S,吃水深度为 h,如不计水的阻力, 求此船在竖直方向的振动周期。 解: 船静止时浮力与重力平衡, 船在任一位置时,以水面为坐标原点,竖直向下的坐标轴为 y 轴,船的位移用 y 表示 船的位移为 y 时船所受合力为: 船在竖直方向作简谐振动,其角频率和周期为: sin d d 2 2 mgh t − = J mgh t − = J 2 2 d d J mgh 2 0 d 2 d 2 2 = + t mgh J T 2 2 = = g m C O hSg = mg O y P P y f = −(h + y)Sg + mg = −ySg m Sg = gS m T 2 2 = = m = Sh, g h T = 2
4.2简谐振动运动学 4.2.1简谐振动的运动学方程 简诰振动一般可分为自由简诺振动和受迫简谐振动, 首先介绍自由简谐振动,这类振动是指物体仅受振动系统 内部的恢复力(如弹性力)的作用。当物体离开平衡位置 0x* 到达x位置处,它受的弹性恢复力为:F=-::k为弹簧 的倔强系数。 若设物体质量为m,它在时刻t的加速度,振子所受的摩擦阻力与弹簧的质量均忽略不 计,则由牛顿运动定律得: 令★=心为角频率可得: +=0, 这就是弹簧振子满足的动力学方程,其解为: x=AcosQπ+p) 图142,a-图 4.2.2简谐运动的三个重要参量 现在我们讨论简谐振动运动学方程中的A、。、a1+p的物理意义。 (一)、振幅A 1.平衡位置 任何机械振动的物体都始终徘徊在某一定位置的附近,这个位置称为平衡位置 2.振幅A -A≤x≤4,将物体离开平衡位置的最大位移的绝对值称为振动的振幅。 (二)、周期和频率 1,周期 每隔一个固定的时间,物体的运动状态就完全重复一次。这固定的时间T称为振动的周期。 2.频率
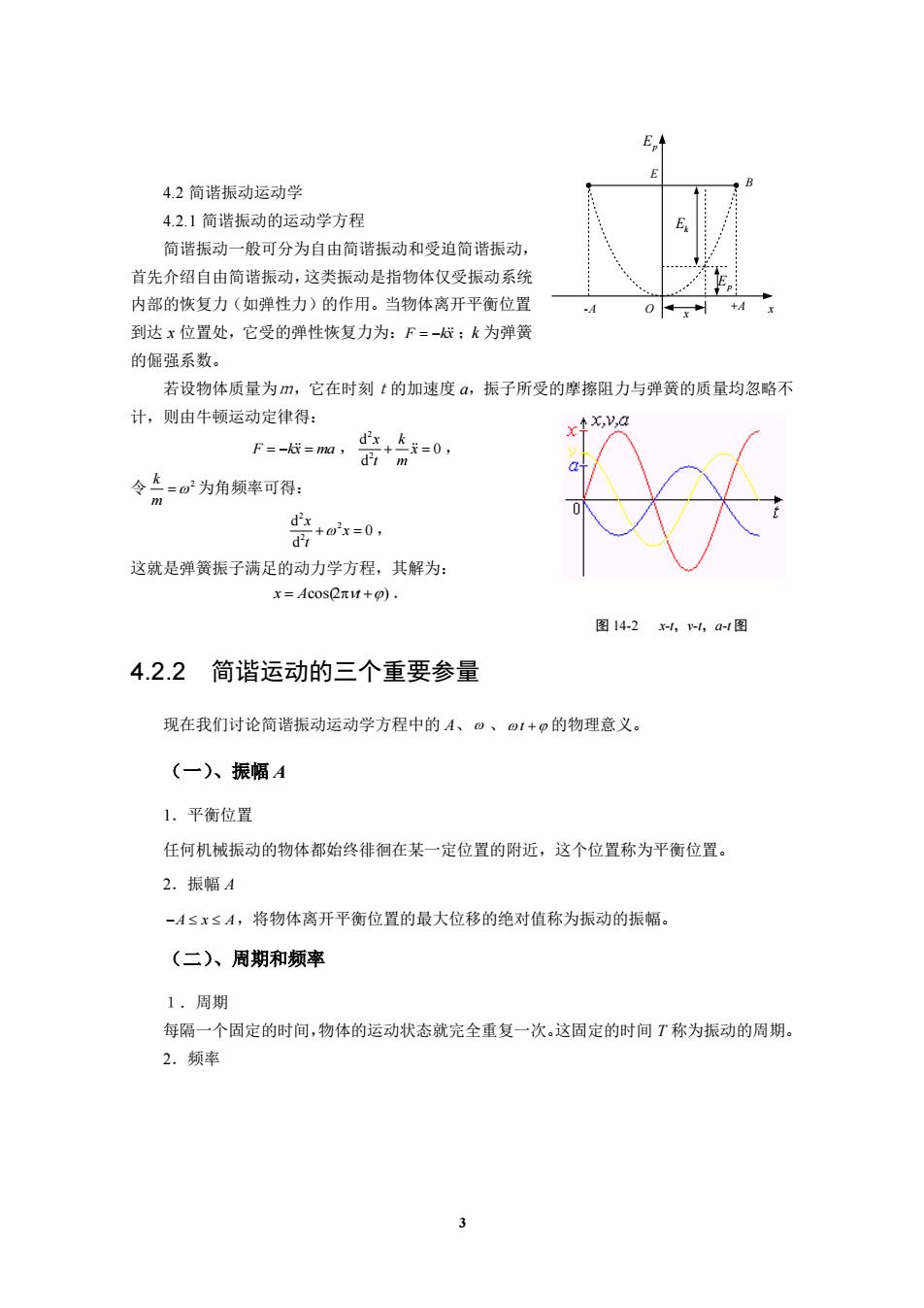
3 4.2 简谐振动运动学 4.2.1 简谐振动的运动学方程 简谐振动一般可分为自由简谐振动和受迫简谐振动, 首先介绍自由简谐振动,这类振动是指物体仅受振动系统 内部的恢复力(如弹性力)的作用。当物体离开平衡位置 到达 x 位置处,它受的弹性恢复力为: F = −k x ;k 为弹簧 的倔强系数。 若设物体质量为m,它在时刻t的加速度 a,振子所受的摩擦阻力与弹簧的质量均忽略不 计,则由牛顿运动定律得: F = −k x = ma , 0 d d 2 2 + x = m k t x , 令 2 = m k 为角频率可得: 0 d d 2 2 2 + x = t x , 这就是弹簧振子满足的动力学方程,其解为: x = Acos(2t +) . 图 14-2 x-t,v-t,a-t 图 4.2.2 简谐运动的三个重要参量 现在我们讨论简谐振动运动学方程中的 A、 、 t + 的物理意义。 (一)、振幅 A 1.平衡位置 任何机械振动的物体都始终徘徊在某一定位置的附近,这个位置称为平衡位置。 2.振幅 A −A x A ,将物体离开平衡位置的最大位移的绝对值称为振动的振幅。 (二)、周期和频率 1.周期 每隔一个固定的时间,物体的运动状态就完全重复一次。这固定的时间 T 称为振动的周期。 2.频率 Ep - A +A x Ek O Ep B E x

每秒内振动的次数称为频率,(出). 3.四、T、v的关系 (1)a、T 注意到+T刀=x0,可得:Acos@t+aT+p)=Acos@1+p). 因此有:o1=2,T=语: 注意到。一,因此有:T限 (2)v、T v=7 (3)m、v 。=2江,。=2因为人。、为粗成简银动的系特征量所定 与外界无关,称为固有周期和固有频率。运动方程也可写为x=Acos2xW+p)或 x=AcosQu/T+). (三)、相位 1.相位p (@1+p)和A、0一起决定1时刻物体运动状态,即位移x,速度y和加速度a, 2。初相决定时刻物体运动状态,即初始位移,初始速度 (四)、由初始条件确定振幅和初相 如果已知初始条件1-0,x-,r-0,代入运动学方程有:名=4cosp,=-m4snp 因此:A=代+(合,p=arctan-点. 讨论:(1)相位的物理意义和现代物理学中地位: (2)运动学方程指数表示. 【例1】一轻弹簧的倔强系数为k,其下悬有一质量为m的盘子,现有一质量为M的物体 从离盘h高度外自由下落到盘中并和盘子粘在一起,于是盘子开始振动。 (1)此时的振动周期与空盘子振动时的周期有何不同? (2)此时的振动振幅多大? (3)取平衡位置为原点,位移以向下为正,并以弹簧开始振动时作为计时起点,求初相, 并写出物体与盘子的振动方程. 【分析】(1)M落到m之前,做自由落体运动,与m作完全非弹性碰撞前的最大速度为
4 每秒内振动的次数称为频率 (HZ). 3. 、T、 的关系 (1) 、T 注意到 x(t +T) = x(t) ,可得: Acos( t +T +) = Acos( t +) . 因此有: T = 2 , = 2 T ; 注意到 m k = ,因此有: k m T = 2 . (2) 、T T 1 = (3) 、 T = 2 , = 2 , m k = 2 1 因为 T、 、 为组成简谐振动的系统特征量所决定, 与外界无关,称为固有周期和固有频率。运动方程也可写为 x = Acos(2t +) 或 x = Acos(2t/T +). (三)、相位 1.相位 (t +) 和 A、 一起决定 t 时刻物体运动状态,即位移 x,速度 v 和加速度 a.. 2.初相决定时刻物体运动状态,即初始位移,初始速度. (四)、由初始条件确定振幅和初相 如果已知初始条件 t=0 , x=x0 ,v=v0,代入运动学方程有: x0 = Acos ,v0 = −Asin . 因此: 2 0 2 0 ( ) v A = x + , arctan( ) 0 0 x v = − . 讨论:(1)相位的物理意义和现代物理学中地位; (2)运动学方程指数表示. 【例 1】一轻弹簧的倔强系数为 k,其下悬有一质量为 m 的盘子,现有一质量为 M 的物体 从离盘 h 高度外自由下落到盘中并和盘子粘在一起,于是盘子开始振动. (1)此时的振动周期与空盘子振动时的周期有何不同? (2)此时的振动振幅多大? (3)取平衡位置为原点,位移以向下为正,并以弹簧开始振动时作为计时起点,求初相, 并写出物体与盘子的振动方程. 【分析】(1)M 落到 m 之前,做自由落体运动,与 m 作完全非弹性碰撞前的最大速度为
=2g动:(2)M与m之间的碰撞是完全非弹性碰撞,因此碰后的速度为,=牛mgh,一 即为开始计时的初速度:(3)由于M落到盘中后,新的平衡位置下移了△x-修,以新的平 衡位置为坐标原点,向下向正方向,所以,=-竖,可解得振动方程 ,神4-受学票,。 k ,r<p<π 4.2.3简谐振动的旋转矢量图示法 (一)、旋转矢量 简谐振动的方程x=4cos@1+p),根据几何学原理可以把 它看作一旋转着的矢A在x轴上的投影。振幅矢量转动一周, 相当于振动一个周期。 【例2】一物体沿x轴作简谐振动,振幅为4,其表达式 用余弦函数表示。若10时,物体的运动状态分别为 (1)x=-A:(2)过平衡位置向x轴正方向运动:(3) 过,=A/2处向x轴负方向运动: 图183 (4)过x=4/2处向x轴正方向运动:试用矢量图示法确定相应的初相。 (二人、相位差 在比较两个或两个以上的简谐振动时,相位的概念很重要。 例如两个振动:为=4cos@1+g),x2=4c0s@1+) 相位差Ap=(o1+)-(o1+0)=- 在同频率的情况下,两个振动的周相差就是它们的初相差。 %>%振动(2)比振动(1)超前或振动(1)比振动(2)落后 ,<%振动(1)比振动(2)超前或振动(2)比振动(1)落后: %=?称这两个振动为同相或同步: 马-g=元称这两个振动为反相。 4.3、简谐振动的能量 动能6=m密=m0 Psn(+-p),势能E==k.fco(ew+pl,又k=mo,所 以,(+5,=,弹簧振子作简谐运动的总能量与振幅的二次方成正比,由于在简谐振动中
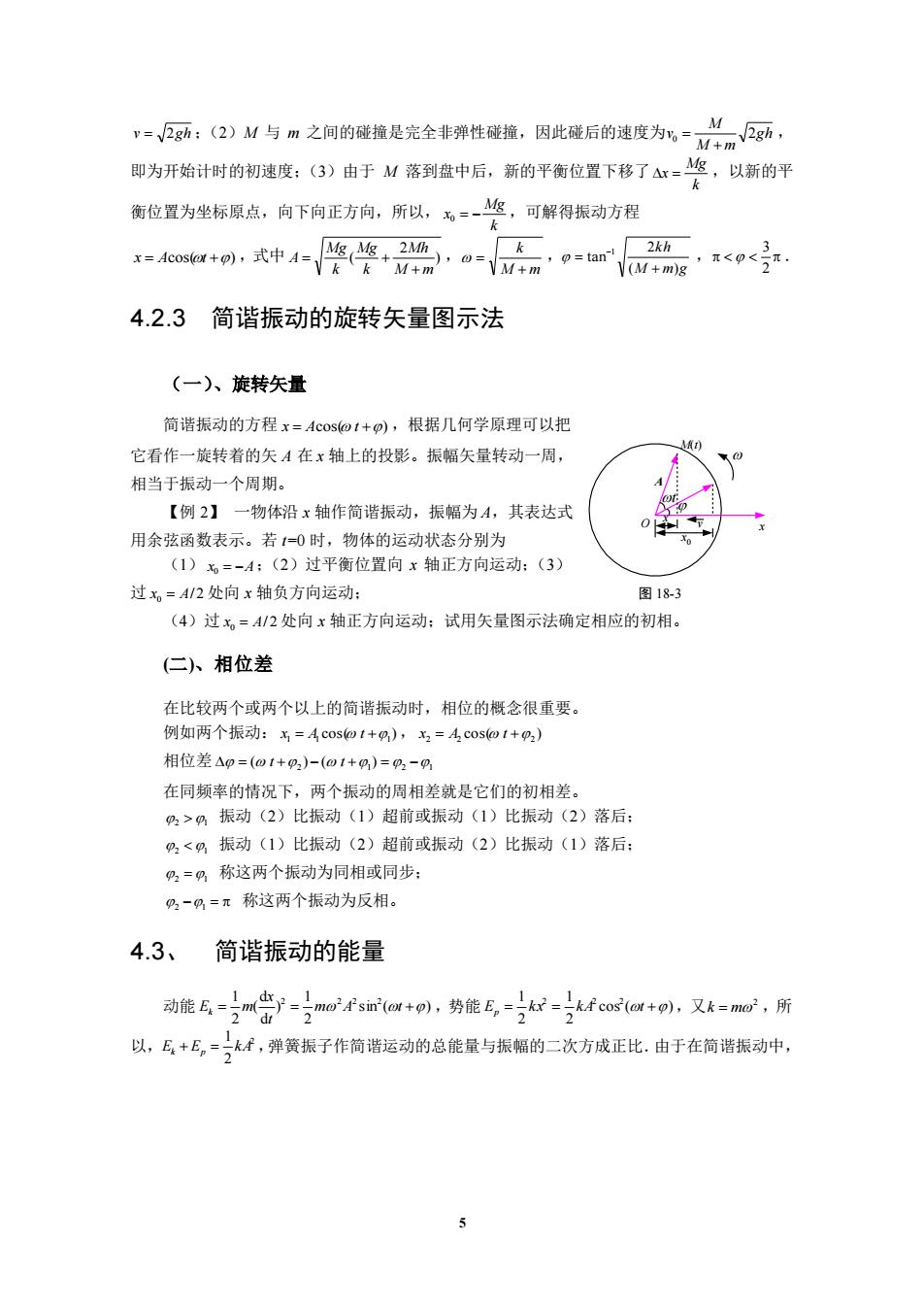
5 v = 2gh ;(2)M 与 m 之间的碰撞是完全非弹性碰撞,因此碰后的速度为 gh M m M v0 2 + = , 即为开始计时的初速度;(3)由于 M 落到盘中后,新的平衡位置下移了 k Mg x = ,以新的平 衡位置为坐标原点,向下向正方向,所以, k Mg x0 = − ,可解得振动方程 x = Acos(t +) ,式中 ) 2 ( M m Mh k Mg k Mg A + = + , M m k + = , M m g kh ( ) 2 tan 1 + = − , 2 3 . 4.2.3 简谐振动的旋转矢量图示法 (一)、旋转矢量 简谐振动的方程 x = Acos( t +) ,根据几何学原理可以把 它看作一旋转着的矢 A 在 x 轴上的投影。振幅矢量转动一周, 相当于振动一个周期。 【例 2】 一物体沿 x 轴作简谐振动,振幅为 A,其表达式 用余弦函数表示。若 t=0 时,物体的运动状态分别为 (1) x0 = −A ;(2)过平衡位置向 x 轴正方向运动;(3) 过 x0 = A/ 2 处向 x 轴负方向运动; 图 18-3 (4)过 x0 = A/ 2 处向 x 轴正方向运动;试用矢量图示法确定相应的初相。 (二)、相位差 在比较两个或两个以上的简谐振动时,相位的概念很重要。 例如两个振动: cos( ) 1 = 1 +1 x A t , cos( ) 2 = 2 +2 x A t 相位差 2 1 2 1 = ( t + ) − ( t + ) = − 在同频率的情况下,两个振动的周相差就是它们的初相差。 2 1 振动(2)比振动(1)超前或振动(1)比振动(2)落后; 2 1 振动(1)比振动(2)超前或振动(2)比振动(1)落后; 2 = 1 称这两个振动为同相或同步; 2 −1 = 称这两个振动为反相。 4.3、 简谐振动的能量 动能 sin ( ) 2 1 ) d d ( 2 1 2 2 2 2 = = m A t + t x Ek m ,势能 cos ( ) 2 1 2 1 2 2 2 Ep = k x = k A t + ,又 2 k = m ,所 以, 2 2 1 Ek + Ep = kA ,弹簧振子作简谐运动的总能量与振幅的二次方成正比.由于在简谐振动中, x x0 O x A M(t) t v