第1章绪论 Caudal fin Actuation Body system Ventral fin a)仿生机器鱼 a)Robot fish Fixture Short crank Short cmank LIPCA Caudal fi Coupler Rack LIPCA Pinion Couple Pinion Rack Crank Long crank LIPCA LIPCA Fixture Fixture b)驱动机构原理图 c)驱动装置实物 b)Principle of the driving mechanism c)Photo of the driving mechanism 图1-12韩国建国大学研制的PZT驱动仿生机器鱼52] Fig.1-12 The PZT driven bionic robot fish developed by Konkuk Universityl521 1.2.3SMA驱动的仿生机器鱼 SMA是一种具有形状记忆效应的合金,即合金的形状被改变之后,一旦加 热到一定的跃变温度时,它又可以变回到原来的形状,人们把具有这种特殊功 能的合金称为形状记忆合金5354。合金的形状记忆效应是一种特殊的热机械 行为,它是热弹性马氏体相变产生的低温相(马氏体)在加热时向高温相(奥氏体) 进行可逆转变的结果5557]。利用形状记忆合金在加热时形状恢复的同时其回复 力可对外作功的特性,可将其用作驱动元件58,59。SMA本质上是金属,具有 金属导电性,因此可利用电加热的方式对SMA驱动器进行驱动[6o,6。SMA的 应变最高可达8%62,63),应力可达500MPaI64,并且易于驱动,且驱动电压较 低,因而在仿生设计中获得了广泛应用657)。 2000年,美国东北大学的Ayers等人最早研制了SMA驱动的仿生机器鱼[74, 如图1-13所示,该机器鱼以七鳃鳗为仿生对象,通过身体的波动实现推进。其 躯体外部由蒙皮包裹,内部分为六段,每一段均可单独实现柔性弯曲。躯体每 一段的结构相同,均由位于中轴线的弹性梁和偏置分布在其两侧的SMA丝构 成,通过SMA丝的收缩,弹性梁可实现双向弯曲,从而使机器鱼躯体实现弯 曲。此外,新加坡南洋理工大学的Low KH等人也研制了一款SMA驱动的鳗 -9- 万方数据
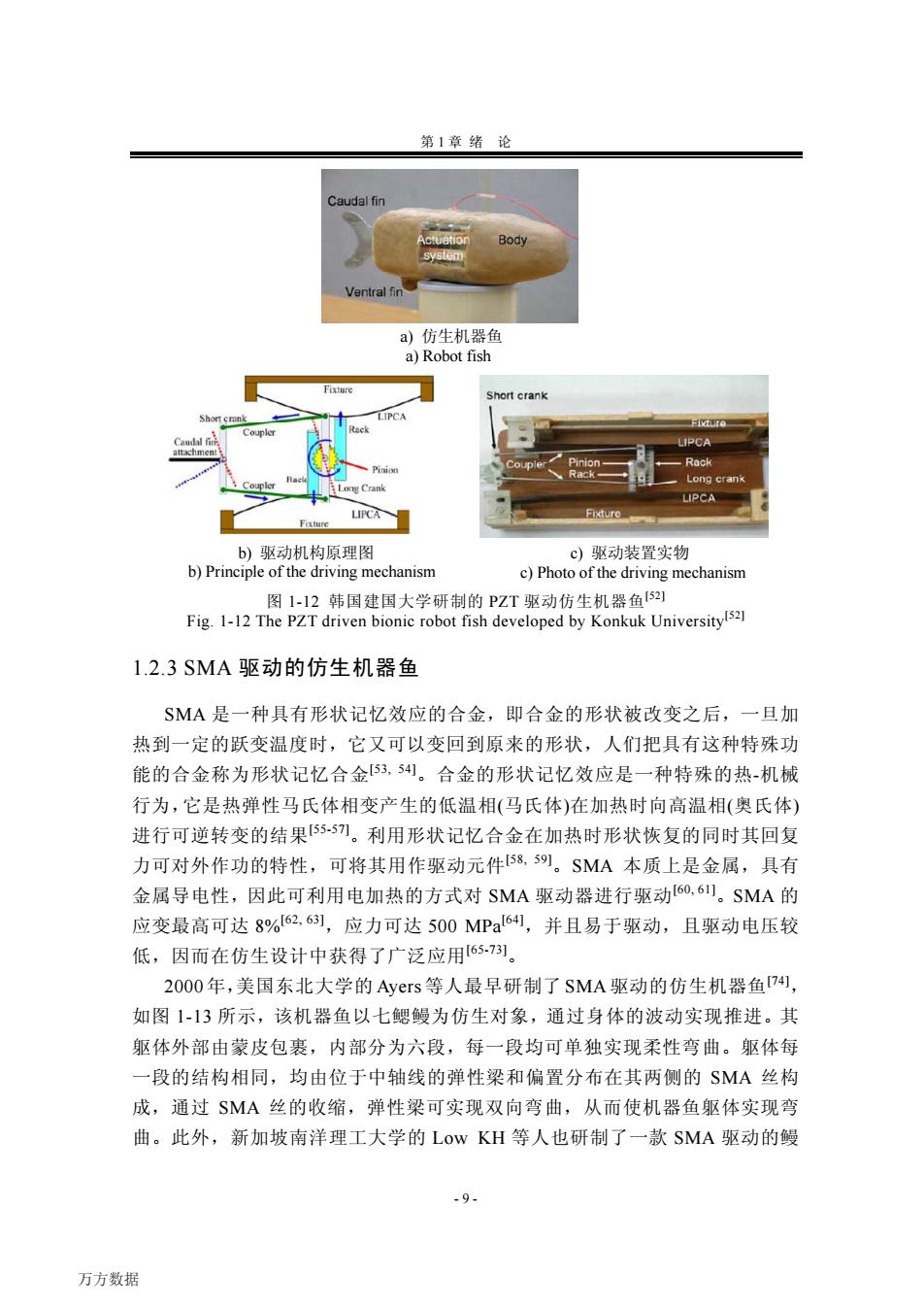
第 1 章 绪 论 - 9 - b) 驱动机构原理图 c) 驱动装置实物 a) 仿生机器鱼 a) Robot fish b) Principle of the driving mechanism c) Photo of the driving mechanism 图 1-12 韩国建国大学研制的 PZT 驱动仿生机器鱼[52] Fig. 1-12 The PZT driven bionic robot fish developed by Konkuk University[52] 1.2.3 SMA 驱动的仿生机器鱼 SMA 是一种具有形状记忆效应的合金,即合金的形状被改变之后,一旦加 热到一定的跃变温度时,它又可以变回到原来的形状,人们把具有这种特殊功 能的合金称为形状记忆合金[53, 54]。合金的形状记忆效应是一种特殊的热-机械 行为,它是热弹性马氏体相变产生的低温相(马氏体)在加热时向高温相(奥氏体) 进行可逆转变的结果[55-57]。利用形状记忆合金在加热时形状恢复的同时其回复 力可对外作功的特性,可将其用作驱动元件[58, 59]。SMA 本质上是金属,具有 金属导电性,因此可利用电加热的方式对 SMA 驱动器进行驱动[60, 61]。SMA 的 应变最高可达 8%[62, 63],应力可达 500 MPa[64],并且易于驱动,且驱动电压较 低,因而在仿生设计中获得了广泛应用[65-73]。 2000 年,美国东北大学的 Ayers 等人最早研制了 SMA 驱动的仿生机器鱼[74], 如图 1-13 所示,该机器鱼以七鳃鳗为仿生对象,通过身体的波动实现推进。其 躯体外部由蒙皮包裹,内部分为六段,每一段均可单独实现柔性弯曲。躯体每 一段的结构相同,均由位于中轴线的弹性梁和偏置分布在其两侧的 SMA 丝构 成,通过 SMA 丝的收缩,弹性梁可实现双向弯曲,从而使机器鱼躯体实现弯 曲。此外,新加坡南洋理工大学的 Low KH 等人也研制了一款 SMA 驱动的鳗 万方数据
哈尔滨工业大学工学博士学位论文 鲡模式的仿生机器鱼75],如图1-14所示。该机器鱼的身体仅分为三段,每一 段均可通过SMA的驱动实现弯曲。由于模拟鳗鲡游动模式,上述两款机器鱼 的游动速度均较低。 树脂玻璃罩 柔性躯体 弹性尾鳍 控制电路 柔性弯曲单元 莱卡蒙皮 图1-13美国东北大学研制的SMA驱动仿生 图1-14新加坡南洋理工大学研制的SMA 七鳃鳗74 驱动仿生波动推进装置] Fig.1-13 The SMA driven lamprey robot Fig.1-14 The SMA driven undulating developed by Northeastern University741 propulsion system developed by NTU 2004年,美国弗罗里达工业大学的Shinjo等人设计了最早的由SMA驱动 的尾鳍摆动推进模式的仿生机器鱼76,如图1-15所示。该机器鱼由头部、身 体和尾鳍等三部分组成。身体由若干段环状的刚性骨架和一根弹性脊柱支撑而 成,刚性骨架之间由绝缘凝胶填充,尾鳍连接在弹性脊柱末端。在刚性骨架与 弹性脊柱之间连接了多根SMA丝,在SMA丝的拉动下,弹性脊柱可实现弯曲, 从而带动尾鳍摆动。此外,中国科学技术大学的章永华等人于2006年设计了 一款SMA弹簧驱动的仿生机器鱼[7,如图1-16所示。该机器鱼采用直径为0.2 mm的SMA弹簧作为致动器,6根SMA弹簧对称的分布在身体的两侧,利用 SMA弹簧的收缩运动来模拟鱼类的肌肉收缩运动。 刚性骨架绝缘凝胶 ptical 聚氨酯尾鳍 rotation sensor 头部 弹性脊柱 图1-15美国弗罗里达工业大学设计的SMA图1-16中国科学技术大学设计的SMA弹 驱动的仿生机器鱼76] 簧驱动的仿生机器鱼) Fig.1-15 The SMA driven robot fish designed Fig.1-16 The robot fish driven by SMA by Florida Insititute of Technology spring designed by USTC7 2008年本课题组的杭观荣博士等人研制了一款SMA驱动的尾鳍摆动推进 模式仿生机器鱼78,7,如图1-17所示。该机器鱼采用整体密封设计,体长146 mm,重量仅为30g,自带电源和微控制器,具备简易遥控功能。该机器鱼的 最大游动速度可达112mm/s,相对游动速度可达0.77BL/s,是目前研制的智能 -10- 万方数据
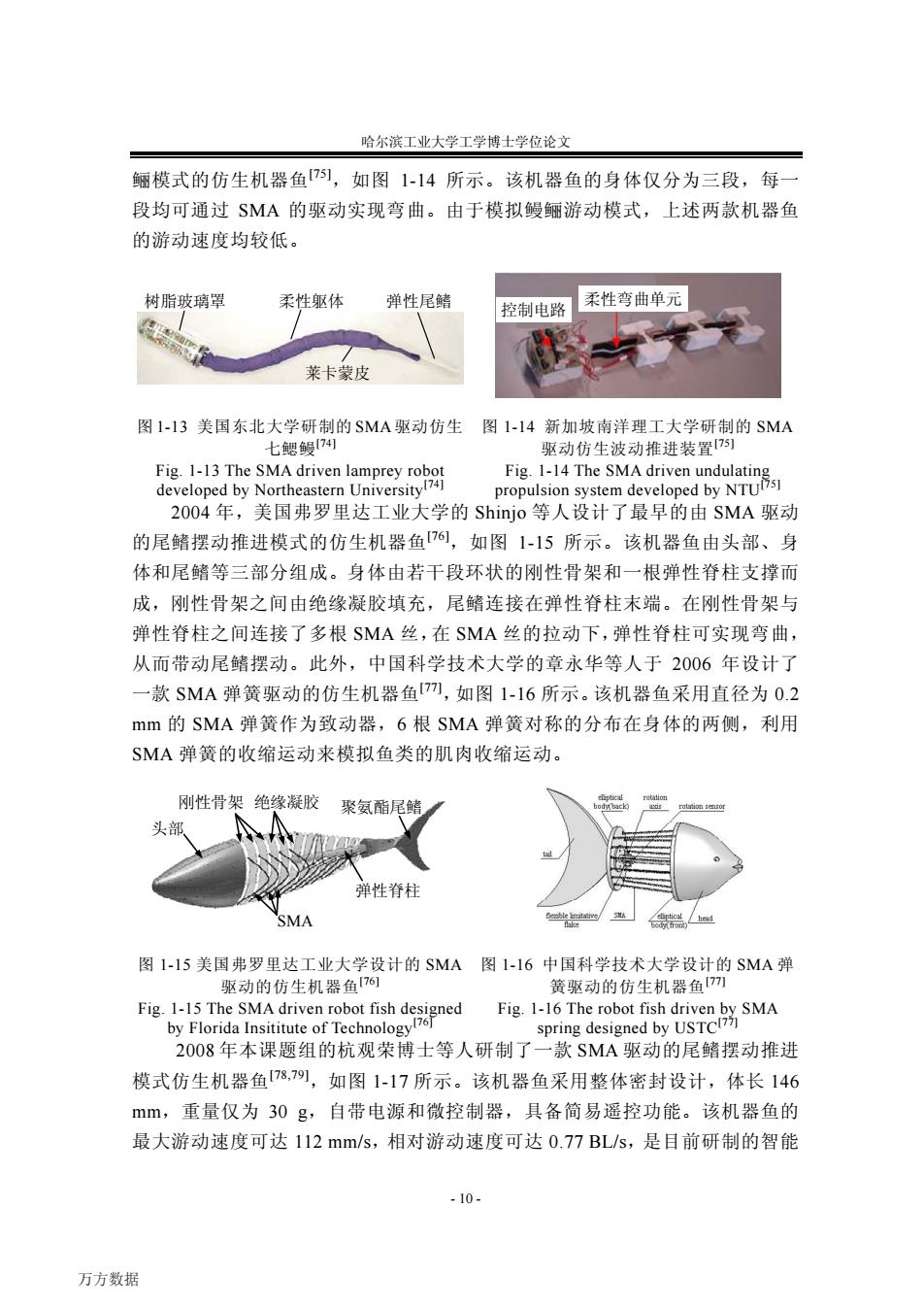
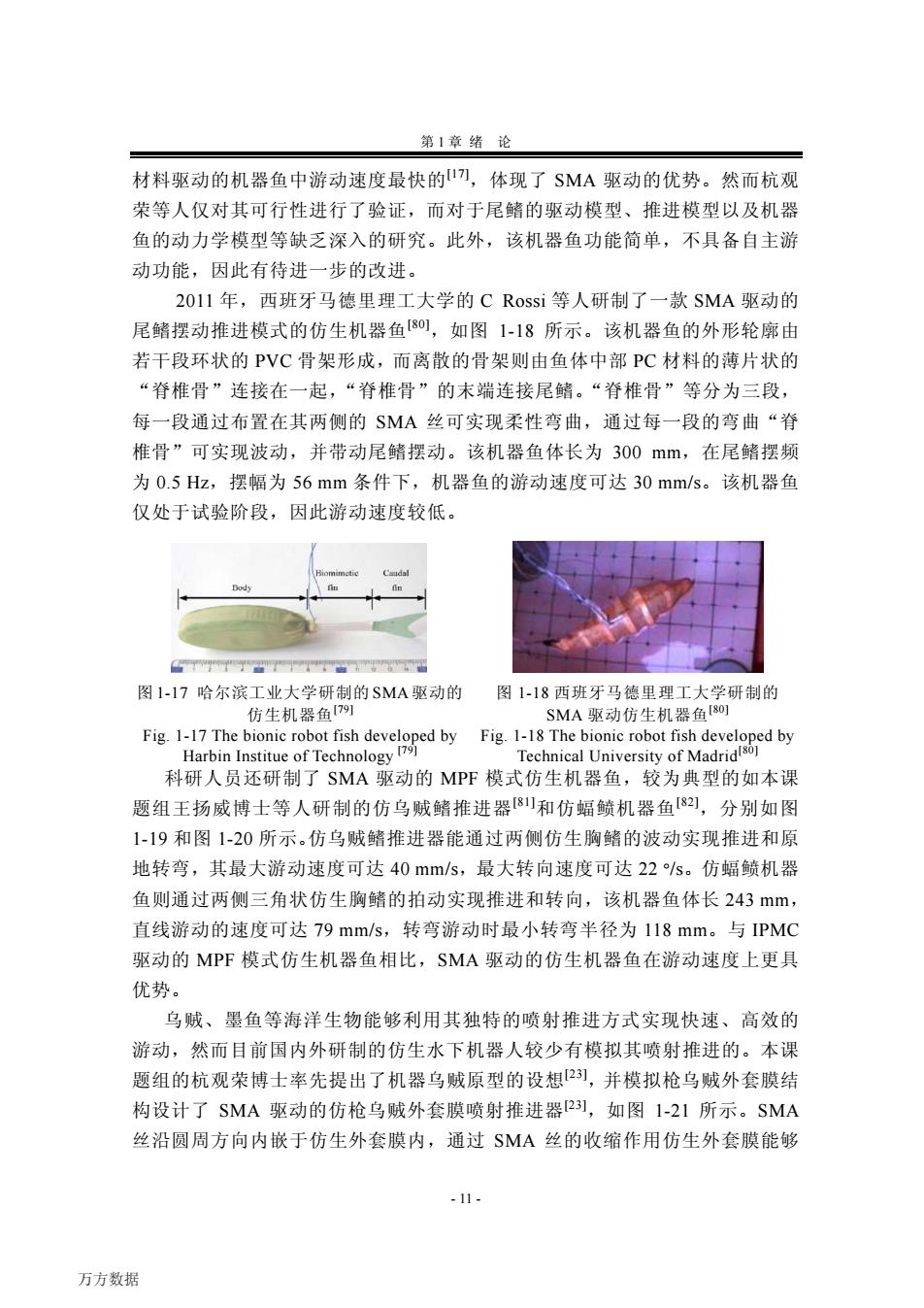
哈尔滨工业大学工学博士学位论文 - 10 - 鲡模式的仿生机器鱼[75],如图 1-14 所示。该机器鱼的身体仅分为三段,每一 段均可通过 SMA 的驱动实现弯曲。由于模拟鳗鲡游动模式,上述两款机器鱼 的游动速度均较低。 树脂玻璃罩 柔性躯体 弹性尾鳍 莱卡蒙皮 柔性弯曲单元 控制电路 图 1-13 美国东北大学研制的 SMA 驱动仿生 七鳃鳗[74] 图 1-14 新加坡南洋理工大学研制的 SMA 驱动仿生波动推进装置[75] Fig. 1-13 The SMA driven lamprey robot developed by Northeastern University[74] Fig. 1-14 The SMA driven undulating propulsion system developed by NTU[75] 2004 年,美国弗罗里达工业大学的 Shinjo 等人设计了最早的由 SMA 驱动 的尾鳍摆动推进模式的仿生机器鱼[76],如图 1-15 所示。该机器鱼由头部、身 体和尾鳍等三部分组成。身体由若干段环状的刚性骨架和一根弹性脊柱支撑而 成,刚性骨架之间由绝缘凝胶填充,尾鳍连接在弹性脊柱末端。在刚性骨架与 弹性脊柱之间连接了多根 SMA 丝,在 SMA 丝的拉动下,弹性脊柱可实现弯曲, 从而带动尾鳍摆动。此外,中国科学技术大学的章永华等人于 2006 年设计了 一款 SMA 弹簧驱动的仿生机器鱼[77],如图 1-16 所示。该机器鱼采用直径为 0.2 mm 的 SMA 弹簧作为致动器,6 根 SMA 弹簧对称的分布在身体的两侧,利用 SMA 弹簧的收缩运动来模拟鱼类的肌肉收缩运动。 头部 弹性脊柱 SMA 刚性骨架 绝缘凝胶 聚氨酯尾鳍 图 1-15 美国弗罗里达工业大学设计的 SMA 驱动的仿生机器鱼[76] 图 1-16 中国科学技术大学设计的 SMA 弹 簧驱动的仿生机器鱼[77] Fig. 1-15 The SMA driven robot fish designed by Florida Insititute of Technology[76] Fig. 1-16 The robot fish driven by SMA spring designed by USTC[77] 2008 年本课题组的杭观荣博士等人研制了一款 SMA 驱动的尾鳍摆动推进 模式仿生机器鱼[78,79],如图 1-17 所示。该机器鱼采用整体密封设计,体长 146 mm,重量仅为 30 g,自带电源和微控制器,具备简易遥控功能。该机器鱼的 最大游动速度可达 112 mm/s,相对游动速度可达 0.77 BL/s,是目前研制的智能 万方数据
第1章绪论 材料驱动的机器鱼中游动速度最快的1刀,体现了SMA驱动的优势。然而杭观 荣等人仅对其可行性进行了验证,而对于尾鳍的驱动模型、推进模型以及机器 鱼的动力学模型等缺乏深入的研究。此外,该机器鱼功能简单,不具备自主游 动功能,因此有待进一步的改进。 2011年,西班牙马德里理工大学的C Rossi等人研制了一款SMA驱动的 尾鳍摆动推进模式的仿生机器鱼80),如图1-18所示。该机器鱼的外形轮廓由 若干段环状的PVC骨架形成,而离散的骨架则由鱼体中部PC材料的薄片状的 “脊椎骨”连接在一起,“脊椎骨”的末端连接尾鳍。“脊椎骨”等分为三段, 每一段通过布置在其两侧的SMA丝可实现柔性弯曲,通过每一段的弯曲“脊 椎骨”可实现波动,并带动尾鳍摆动。该机器鱼体长为300mm,在尾鳍摆频 为0.5Hz,摆幅为56mm条件下,机器鱼的游动速度可达30mm/s。该机器鱼 仅处于试验阶段,因此游动速度较低。 Caudal T 图1-17哈尔滨工业大学研制的SMA驱动的 图1-18西班牙马德里理工大学研制的 仿生机器鱼79) SMA驱动仿生机器鱼[8o Fig.1-17 The bionic robot fish developed by Fig.1-18 The bionic robot fish developed by Harbin Institue of Technology7 Technical University of Madrid81 科研人员还研制了SMA驱动的MPF模式仿生机器鱼,较为典型的如本课 题组王扬威博士等人研制的仿乌贼鳍推进器8)和仿蝠鲼机器鱼[82),分别如图 1-19和图1-20所示。仿乌贼鳍推进器能通过两侧仿生胸鳍的波动实现推进和原 地转弯,其最大游动速度可达40mm/s,最大转向速度可达22°/s。仿蝠鲼机器 鱼则通过两侧三角状仿生胸鳍的拍动实现推进和转向,该机器鱼体长243mm, 直线游动的速度可达79mm/s,转弯游动时最小转弯半径为118mm。与IPMC 驱动的MPF模式仿生机器鱼相比,SMA驱动的仿生机器鱼在游动速度上更具 优势。 乌贼、墨鱼等海洋生物能够利用其独特的喷射推进方式实现快速、高效的 游动,然而目前国内外研制的仿生水下机器人较少有模拟其喷射推进的。本课 题组的杭观荣博士率先提出了机器乌贼原型的设想2),并模拟枪乌贼外套膜结 构设计了SMA驱动的仿枪乌贼外套膜喷射推进器2],如图1-21所示。SMA 丝沿圆周方向内嵌于仿生外套膜内,通过SMA丝的收缩作用仿生外套膜能够 -11- 万方数据
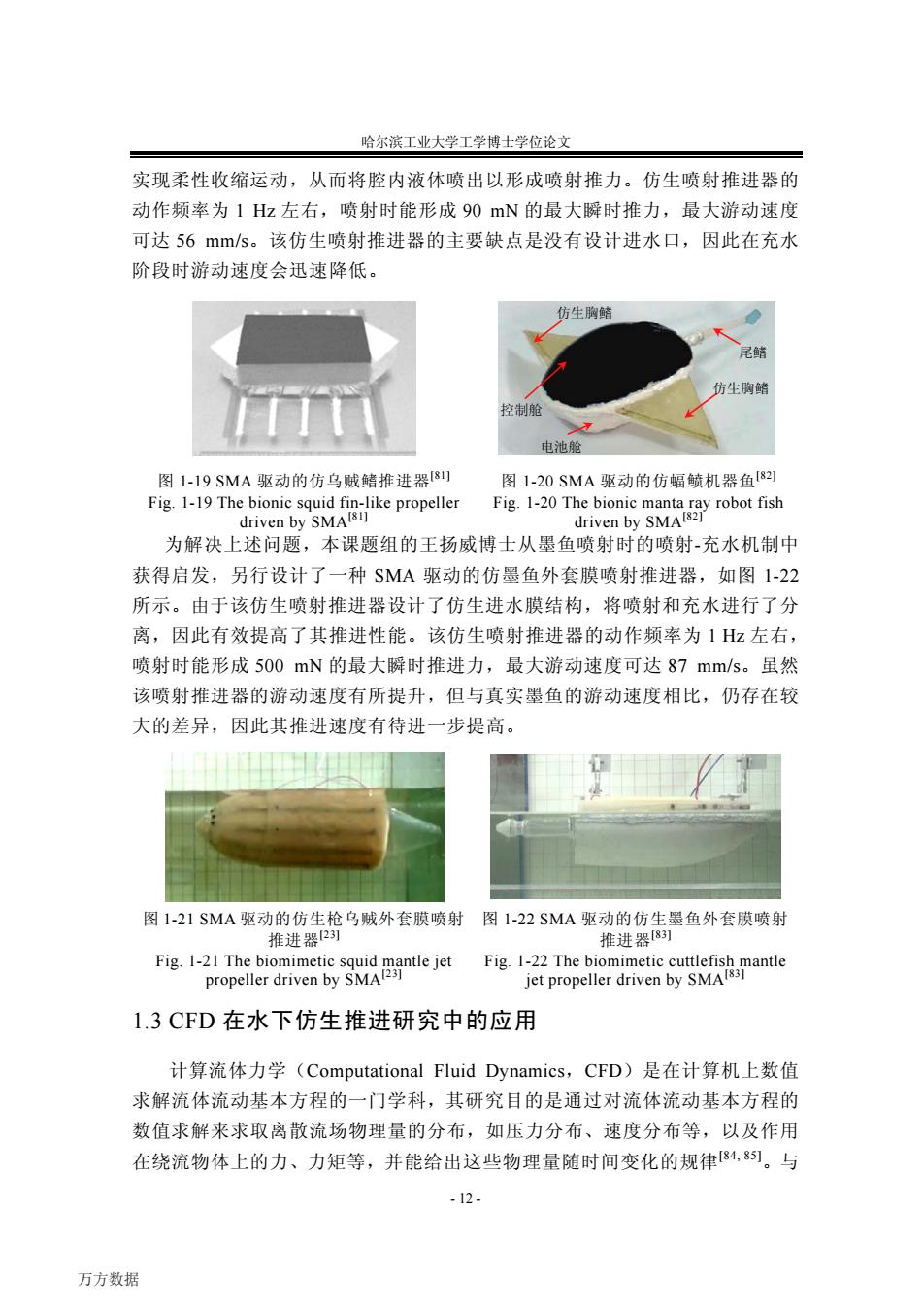
第 1 章 绪 论 - 11 - 材料驱动的机器鱼中游动速度最快的[17],体现了 SMA 驱动的优势。然而杭观 荣等人仅对其可行性进行了验证,而对于尾鳍的驱动模型、推进模型以及机器 鱼的动力学模型等缺乏深入的研究。此外,该机器鱼功能简单,不具备自主游 动功能,因此有待进一步的改进。 2011 年,西班牙马德里理工大学的 C Rossi 等人研制了一款 SMA 驱动的 尾鳍摆动推进模式的仿生机器鱼[80],如图 1-18 所示。该机器鱼的外形轮廓由 若干段环状的 PVC 骨架形成,而离散的骨架则由鱼体中部 PC 材料的薄片状的 “脊椎骨”连接在一起,“脊椎骨”的末端连接尾鳍。“脊椎骨”等分为三段, 每一段通过布置在其两侧的 SMA 丝可实现柔性弯曲,通过每一段的弯曲“脊 椎骨”可实现波动,并带动尾鳍摆动。该机器鱼体长为 300 mm,在尾鳍摆频 为 0.5 Hz,摆幅为 56 mm 条件下,机器鱼的游动速度可达 30 mm/s。该机器鱼 仅处于试验阶段,因此游动速度较低。 图 1-17 哈尔滨工业大学研制的 SMA 驱动的 仿生机器鱼[79] 图 1-18 西班牙马德里理工大学研制的 SMA 驱动仿生机器鱼[80] Fig. 1-17 The bionic robot fish developed by Harbin Institue of Technology [79] Fig. 1-18 The bionic robot fish developed by Technical University of Madrid[80] 科研人员还研制了 SMA 驱动的 MPF 模式仿生机器鱼,较为典型的如本课 题组王扬威博士等人研制的仿乌贼鳍推进器[81]和仿蝠鲼机器鱼[82],分别如图 1-19 和图 1-20 所示。仿乌贼鳍推进器能通过两侧仿生胸鳍的波动实现推进和原 地转弯,其最大游动速度可达 40 mm/s,最大转向速度可达 22 °/s。仿蝠鲼机器 鱼则通过两侧三角状仿生胸鳍的拍动实现推进和转向,该机器鱼体长 243 mm, 直线游动的速度可达 79 mm/s,转弯游动时最小转弯半径为 118 mm。与 IPMC 驱动的 MPF 模式仿生机器鱼相比,SMA 驱动的仿生机器鱼在游动速度上更具 优势。 乌贼、墨鱼等海洋生物能够利用其独特的喷射推进方式实现快速、高效的 游动,然而目前国内外研制的仿生水下机器人较少有模拟其喷射推进的。本课 题组的杭观荣博士率先提出了机器乌贼原型的设想[23],并模拟枪乌贼外套膜结 构设计了 SMA 驱动的仿枪乌贼外套膜喷射推进器[23],如图 1-21 所示。SMA 丝沿圆周方向内嵌于仿生外套膜内,通过 SMA 丝的收缩作用仿生外套膜能够 万方数据
哈尔滨工业大学工学博士学位论文 实现柔性收缩运动,从而将腔内液体喷出以形成喷射推力。仿生喷射推进器的 动作频率为1Hz左右,喷射时能形成90mN的最大瞬时推力,最大游动速度 可达56mm/s。该仿生喷射推进器的主要缺点是没有设计进水口,因此在充水 阶段时游动速度会迅速降低。 仿生胸鳍 尾鳍 仿生胸鳍 控制舱 电池舱 图1-19SMA驱动的仿乌贼鳍推进器8] 图1-20SMA驱动的仿蝠鲼机器鱼82 Fig.1-19 The bionic squid fin-like propeller Fig.1-20 The bionic manta ray robot fish driven by SMAI811 driven by SMA[821 为解决上述问题,本课题组的王扬威博士从墨鱼喷射时的喷射-充水机制中 获得启发,另行设计了一种SMA驱动的仿墨鱼外套膜喷射推进器,如图1-22 所示。由于该仿生喷射推进器设计了仿生进水膜结构,将喷射和充水进行了分 离,因此有效提高了其推进性能。该仿生喷射推进器的动作频率为1Hz左右, 喷射时能形成500mN的最大瞬时推进力,最大游动速度可达87mm/s。虽然 该喷射推进器的游动速度有所提升,但与真实墨鱼的游动速度相比,仍存在较 大的差异,因此其推进速度有待进一步提高。 图1-21SMA驱动的仿生枪乌贼外套膜喷射图1-22SMA驱动的仿生墨鱼外套膜喷射 推进器23) 推进器[83) Fig.1-21 The biomimetic squid mantle jet Fig.1-22 The biomimetic cuttlefish mantle propeller driven by SMAI23] jet propeller driven by SMAI831 1.3CFD在水下仿生推进研究中的应用 计算流体力学(Computational Fluid Dynamics,CFD)是在计算机上数值 求解流体流动基本方程的一门学科,其研究目的是通过对流体流动基本方程的 数值求解来求取离散流场物理量的分布,如压力分布、速度分布等,以及作用 在绕流物体上的力、力矩等,并能给出这些物理量随时间变化的规律84,85)。与 -12- 万方数据
哈尔滨工业大学工学博士学位论文 - 12 - 实现柔性收缩运动,从而将腔内液体喷出以形成喷射推力。仿生喷射推进器的 动作频率为 1 Hz 左右,喷射时能形成 90 mN 的最大瞬时推力,最大游动速度 可达 56 mm/s。该仿生喷射推进器的主要缺点是没有设计进水口,因此在充水 阶段时游动速度会迅速降低。 尾鳍 控制舱 电池舱 仿生胸鳍 仿生胸鳍 图 1-19 SMA 驱动的仿乌贼鳍推进器[81] 图 1-20 SMA 驱动的仿蝠鲼机器鱼[82] Fig. 1-19 The bionic squid fin-like propeller driven by SMA[81] Fig. 1-20 The bionic manta ray robot fish driven by SMA[82] 为解决上述问题,本课题组的王扬威博士从墨鱼喷射时的喷射-充水机制中 获得启发,另行设计了一种 SMA 驱动的仿墨鱼外套膜喷射推进器,如图 1-22 所示。由于该仿生喷射推进器设计了仿生进水膜结构,将喷射和充水进行了分 离,因此有效提高了其推进性能。该仿生喷射推进器的动作频率为 1 Hz 左右, 喷射时能形成 500 mN 的最大瞬时推进力,最大游动速度可达 87 mm/s。虽然 该喷射推进器的游动速度有所提升,但与真实墨鱼的游动速度相比,仍存在较 大的差异,因此其推进速度有待进一步提高。 图 1-21 SMA 驱动的仿生枪乌贼外套膜喷射 推进器[23] 图 1-22 SMA 驱动的仿生墨鱼外套膜喷射 推进器[83] Fig. 1-21 The biomimetic squid mantle jet propeller driven by SMA[23] Fig. 1-22 The biomimetic cuttlefish mantle jet propeller driven by SMA[83] 1.3 CFD 在水下仿生推进研究中的应用 计算流体力学(Computational Fluid Dynamics,CFD)是在计算机上数值 求解流体流动基本方程的一门学科,其研究目的是通过对流体流动基本方程的 数值求解来求取离散流场物理量的分布,如压力分布、速度分布等,以及作用 在绕流物体上的力、力矩等,并能给出这些物理量随时间变化的规律[84, 85]。与 万方数据

第1章绪论 理论流体力学相比,CD能够研究更为复杂的流体情况,也更适合于现实的应 用。与实验流体力学相比,C℉D具有成本低、设计周期短、通用性好等优点86, 8刃。目前,C℉D作为一种基本的研究方法和设计手段已广泛应用于航空、航天、 船舶、化学、医学等诸多研究领域,并发挥着重要的作用[88,89 仿生机器鱼模拟鱼类的游动方式,依靠仿生鳍的摆动或波动实现推进,因 此对仿生鳍的推进性能的研究显得尤为重要。然而仿生鳍的摆动或波动均为复 杂的流体流动问题,难以通过理论建模的方法对其进行分析和求取解析解。因 此,科研人员逐渐尝试采用C℉D的方法对仿生鳍的推进性能进行研究,并取得 了诸多研究成果[90-10] 对于尾鳍摆动推进性能的研究,具有代表性的研究工作见Borazjani和 Sotiropoulos等人的文献1o7-1o),他们通过CFD仿真分别研究了鳗鲡模式和鲹 科模式游动时的水动力性能,并系统地研究了雷诺数R和斯特劳的哈尔数S 对其水动力性能的影响,取得了很多有重要价值的研究成果。其中,R反映了 惯性力和粘性力的比值,S反映了身体或尾鳍的摆动频率。研究结果表明,鳗 鲡模式比较适合于较低Re数下的粘性流动,而鲹科模式比较适合于较高Re 数下的惯性流动。此外,还得到了鱼体游动时的尾迹结构由S数决定的结论: 当S数较小时,尾迹为单列反卡门涡街结构,当S数较大时,尾迹为双列反 卡门涡街结构。图1-23分别给出了鳗鲡模式和鯵科模式的尾迹结构。 a)鳗鲡模式lo8) b)鲹科模式109 a)Anguilliform model108] b)Carangiform mode 图1-23鳗鲡模式和鲹科模式的尾迹结构108,1091 Fig.1-23 Wake structure of anguilliform and carangiform model108.1091 国内哈尔滨工业大学的夏丹等人采用数值方法对鲔科仿生原型游动时的水 动力性能进行了数值模拟1),研究了尾鳍的摆幅、摆频、最大击水角度以及 相位差等因素对游动性能的影响,并提取了流场的三维涡结构,如图1-24所示, 揭示了鲔科仿生原型的推进机理。哈尔滨工程大学的张曦等人通过C℉D仿真研 究了尾鳍形态对尾鳍推进性能的影响),分别数值计算了仿金枪鱼、仿白鲸、 -13- 万方数据
第 1 章 绪 论 - 13 - 理论流体力学相比,CFD 能够研究更为复杂的流体情况,也更适合于现实的应 用。与实验流体力学相比,CFD 具有成本低、设计周期短、通用性好等优点[86, 87]。目前,CFD 作为一种基本的研究方法和设计手段已广泛应用于航空、航天、 船舶、化学、医学等诸多研究领域,并发挥着重要的作用[88, 89]。 仿生机器鱼模拟鱼类的游动方式,依靠仿生鳍的摆动或波动实现推进,因 此对仿生鳍的推进性能的研究显得尤为重要。然而仿生鳍的摆动或波动均为复 杂的流体流动问题,难以通过理论建模的方法对其进行分析和求取解析解。因 此,科研人员逐渐尝试采用 CFD 的方法对仿生鳍的推进性能进行研究,并取得 了诸多研究成果[90-106]。 对于尾鳍摆动推进性能的研究,具有代表性的研究工作见 Borazjani 和 Sotiropoulos 等人的文献[107-109],他们通过 CFD 仿真分别研究了鳗鲡模式和鯵 科模式游动时的水动力性能,并系统地研究了雷诺数 Re 和斯特劳的哈尔数 St 对其水动力性能的影响,取得了很多有重要价值的研究成果。其中,Re 反映了 惯性力和粘性力的比值,St 反映了身体或尾鳍的摆动频率。研究结果表明,鳗 鲡模式比较适合于较低 Re 数下的粘性流动,而鲹科模式比较适合于较高 Re 数下的惯性流动。此外,还得到了鱼体游动时的尾迹结构由 St 数决定的结论: 当 St 数较小时,尾迹为单列反卡门涡街结构,当 St 数较大时,尾迹为双列反 卡门涡街结构。图 1-23 分别给出了鳗鲡模式和鯵科模式的尾迹结构。 a) 鳗鲡模式[108] a) Anguilliform mode[108] b) 鲹科模式[109] b) Carangiform mode[109] 图 1-23 鳗鲡模式和鲹科模式的尾迹结构[108, 109] Fig. 1-23 Wake structure of anguilliform and carangiform mode[108, 109] 国内哈尔滨工业大学的夏丹等人采用数值方法对鲔科仿生原型游动时的水 动力性能进行了数值模拟[110],研究了尾鳍的摆幅、摆频、最大击水角度以及 相位差等因素对游动性能的影响,并提取了流场的三维涡结构,如图 1-24 所示, 揭示了鲔科仿生原型的推进机理。哈尔滨工程大学的张曦等人通过 CFD 仿真研 究了尾鳍形态对尾鳍推进性能的影响[111],分别数值计算了仿金枪鱼、仿白鲸、 万方数据