哈尔滨工业大学工学博士学位论文 仿海豚三种不同形状尾鳍的水动力学性能,得出了尾鳍摆动水动力系数与其形 态无关,而仅与尾鳍投影面积相关以及尾涡大小同样受尾鳍投影面积影响的结 论。图1-25给出了三种形状尾鳍的表面压强分布图。 Prermure coefficient-52 -34 -19 03 12 20 图1-24鲔科模式的尾迹结构1] 图1-25三种形状尾鳍表面压强分布) Fig.1-24 Wake structure of thunniform Fig.1-25 Surface pressure distribution of modelio three different fins 对于长鳍波动的推进性能的研究,具有代表性的研究工作见Curet!2]等人 的文献。Curt等人数值模拟了黑魔鬼刀鱼长腹鳍的波动,计算了长鳍波动的 推进力,研究了波动的波长、波频、波幅以及鳍面的尺寸等因素对推进性能的 影响,分析了鳍波动时周围流场的速度场分布和三维涡结构,如图1-26所示, 揭示了鳍波动的推力产生机制:鳍波动能够诱导出一股向后的射流,而形成的 三维涡环有利于射流的加速。 国内浙江大学的刘芳芳等人仿生设计了一种柔性长背鳍,为研究其推进性 能,基于三维非定常流体控制方程建立了柔性长鳍波动的动力学模型,并利用 CFD方法对其进行了数值计算,分析指出推力产生的原因是由鳍上下表面产生 的压力差所致,并且柔性鳍波动推进力的变化周期是鳍波动周期的一半4,1)。 图1-27为柔性鳍表面的压强分布。 Secondary vortex rings Wave motion Primary vortex rings 图1-26鳍波动的三维涡结构112] 图1-27柔性鳍表面压强分布内 Fig.1-26 Wake structure of thunniform model2 Fig.1-27 Pressure distribution of fin4 1.4目前国内外研究中存在问题分析 自上世纪90年代初,受自然界鱼类游动推进的高效性和快速性的启发, -14- 万方数据
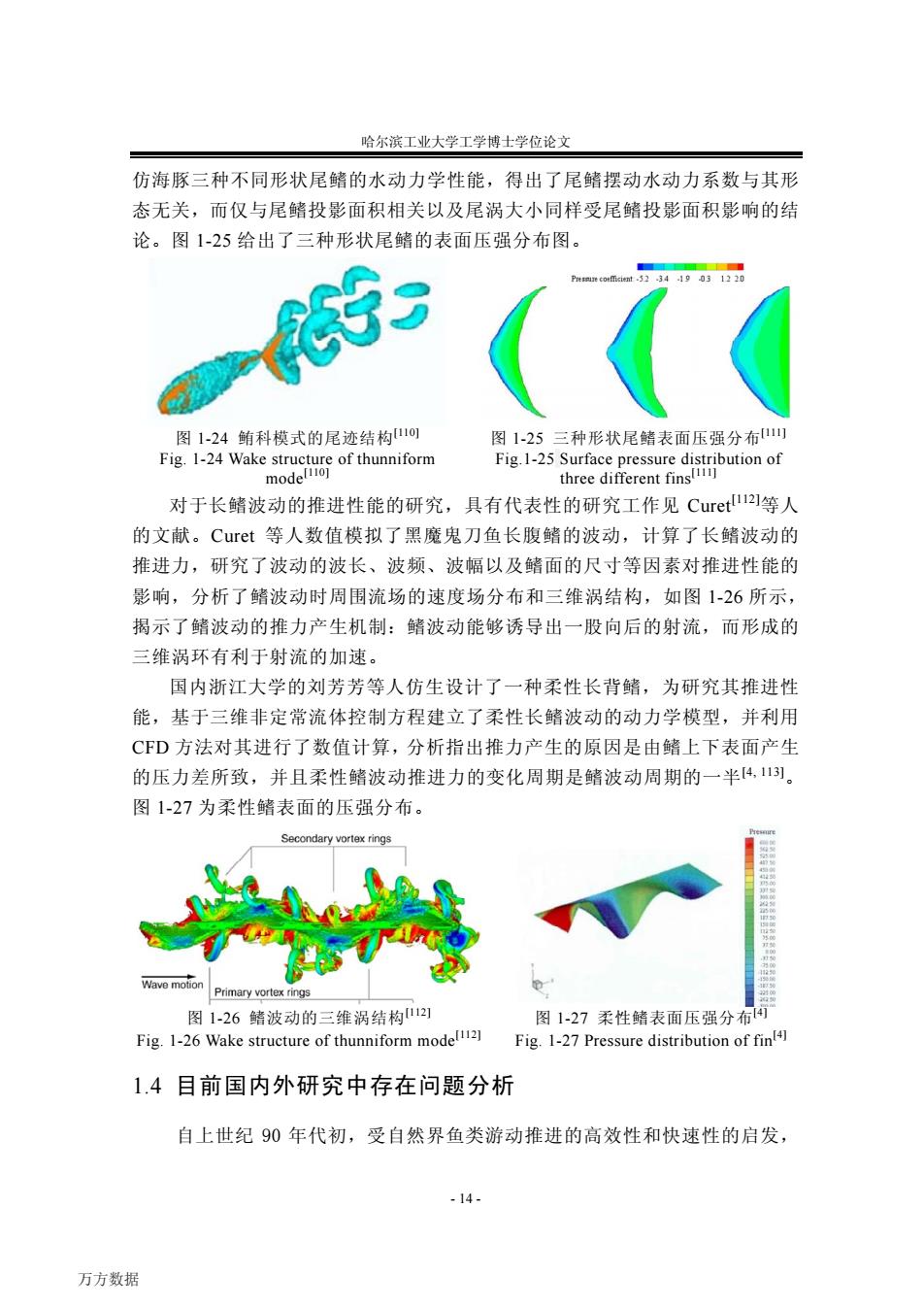
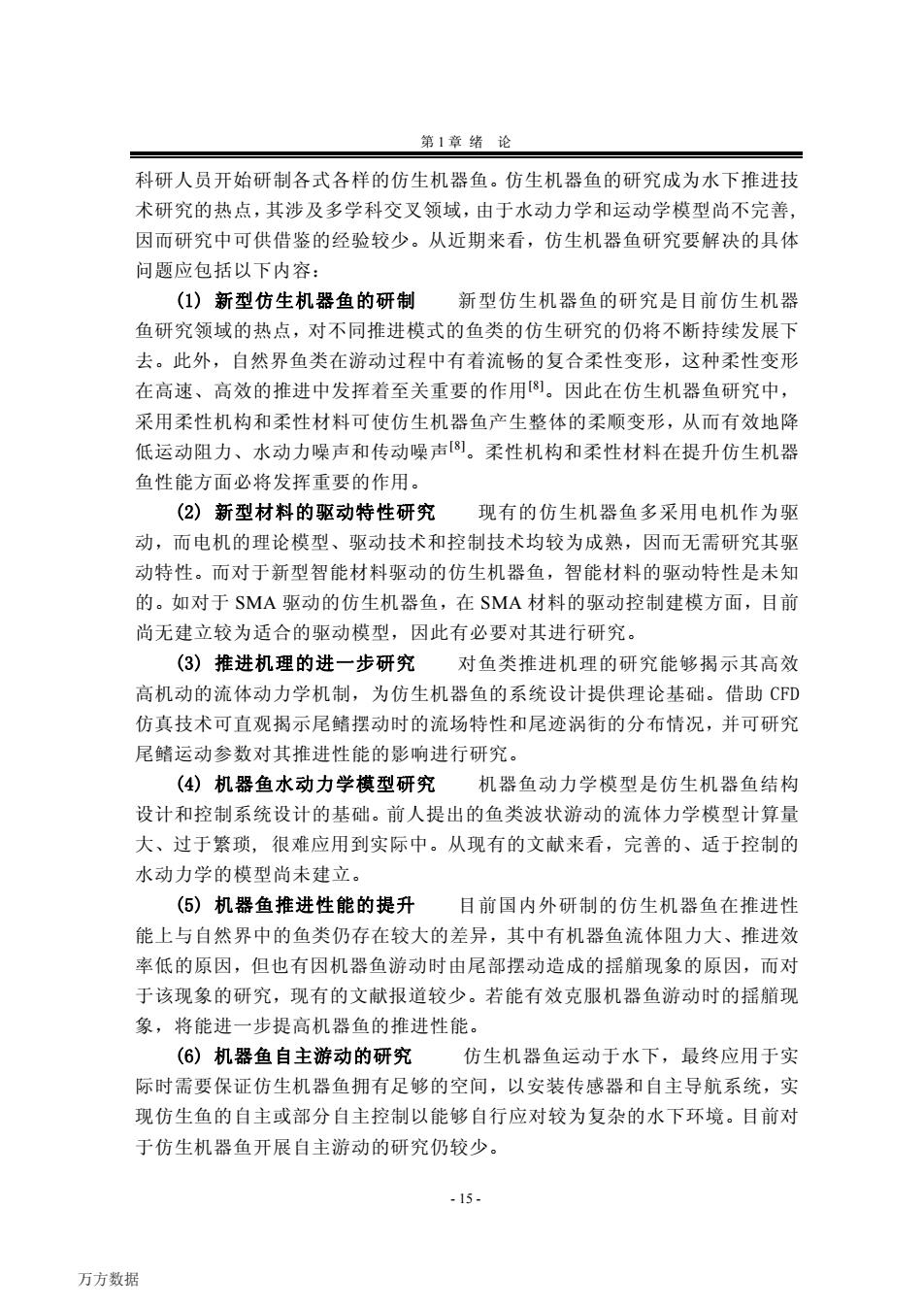
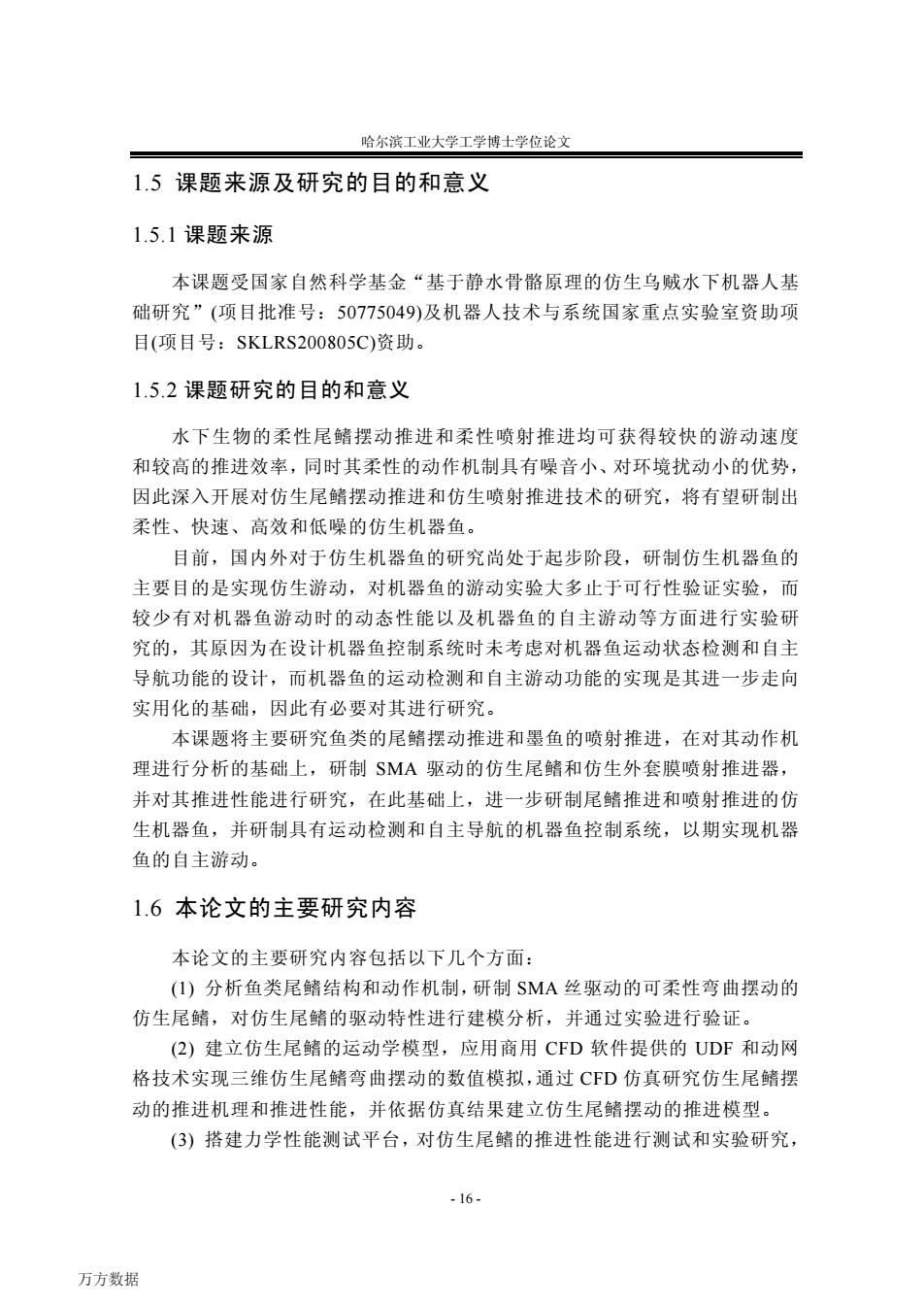
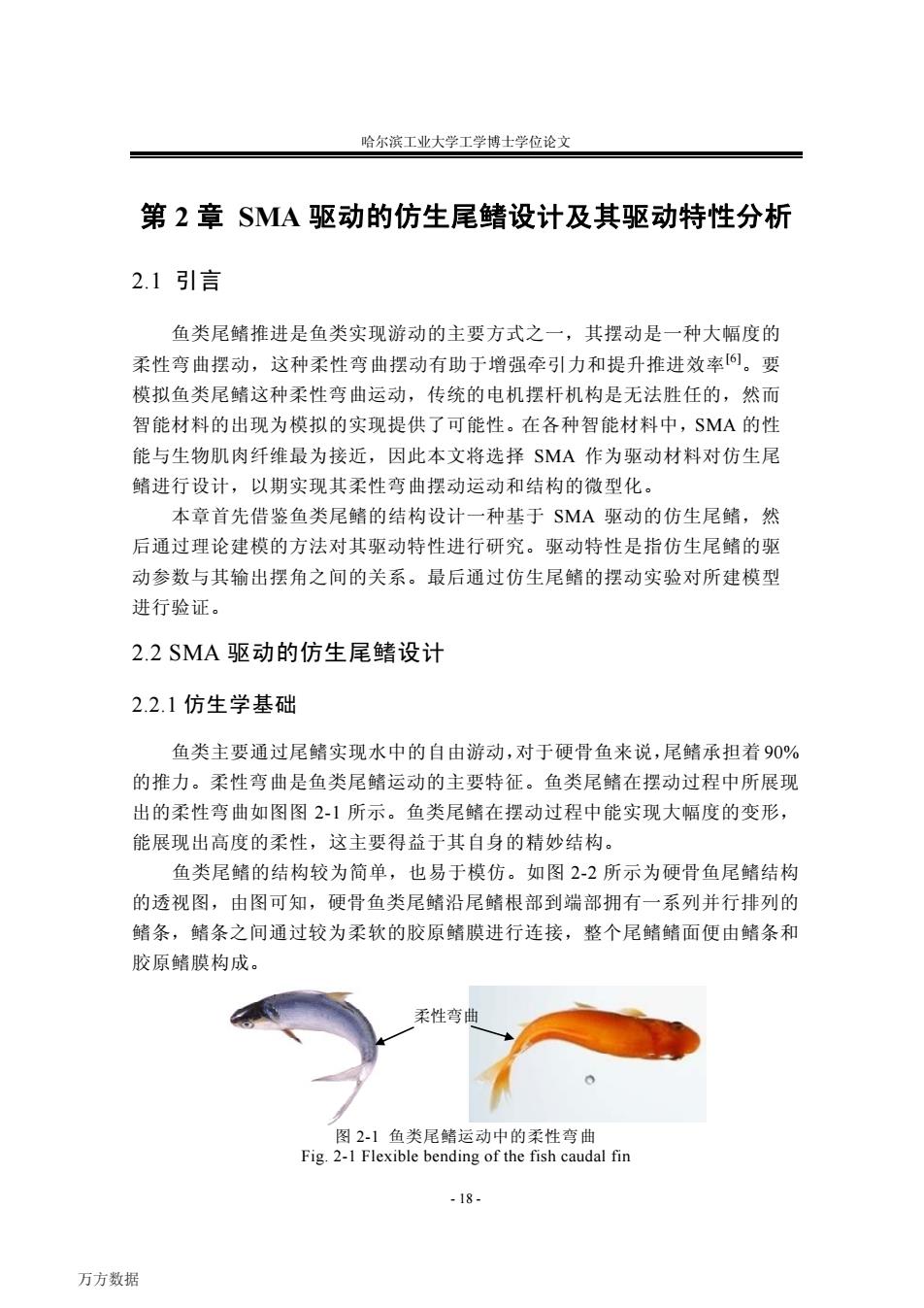
哈尔滨工业大学工学博士学位论文 - 14 - 仿海豚三种不同形状尾鳍的水动力学性能,得出了尾鳍摆动水动力系数与其形 态无关,而仅与尾鳍投影面积相关以及尾涡大小同样受尾鳍投影面积影响的结 论。图 1-25 给出了三种形状尾鳍的表面压强分布图。 图 1-24 鲔科模式的尾迹结构[110] 图 1-25 三种形状尾鳍表面压强分布[111] Fig. 1-24 Wake structure of thunniform mode[110] Fig.1-25 Surface pressure distribution of three different fins[111] 对于长鳍波动的推进性能的研究,具有代表性的研究工作见 Curet[112]等人 的文献。Curet 等人数值模拟了黑魔鬼刀鱼长腹鳍的波动,计算了长鳍波动的 推进力,研究了波动的波长、波频、波幅以及鳍面的尺寸等因素对推进性能的 影响,分析了鳍波动时周围流场的速度场分布和三维涡结构,如图 1-26 所示, 揭示了鳍波动的推力产生机制:鳍波动能够诱导出一股向后的射流,而形成的 三维涡环有利于射流的加速。 国内浙江大学的刘芳芳等人仿生设计了一种柔性长背鳍,为研究其推进性 能,基于三维非定常流体控制方程建立了柔性长鳍波动的动力学模型,并利用 CFD 方法对其进行了数值计算,分析指出推力产生的原因是由鳍上下表面产生 的压力差所致,并且柔性鳍波动推进力的变化周期是鳍波动周期的一半[4, 113]。 图 1-27 为柔性鳍表面的压强分布。 图 1-26 鳍波动的三维涡结构[112] 图 1-27 柔性鳍表面压强分布[4] Fig. 1-26 Wake structure of thunniform mode[112] Fig. 1-27 Pressure distribution of fin[4] 1.4 目前国内外研究中存在问题分析 自上世纪 90 年代初,受自然界鱼类游动推进的高效性和快速性的启发, 万方数据
第1章绪论 科研人员开始研制各式各样的仿生机器鱼。仿生机器鱼的研究成为水下推进技 术研究的热点,其涉及多学科交叉领域,由于水动力学和运动学模型尚不完善, 因而研究中可供借鉴的经验较少。从近期来看,仿生机器鱼研究要解决的具体 问题应包括以下内容: (1)新型仿生机器鱼的研制新型仿生机器鱼的研究是目前仿生机器 鱼研究领域的热点,对不同推进模式的鱼类的仿生研究的仍将不断持续发展下 去。此外,自然界鱼类在游动过程中有着流畅的复合柔性变形,这种柔性变形 在高速、高效的推进中发挥着至关重要的作用8]。因此在仿生机器鱼研究中, 采用柔性机构和柔性材料可使仿生机器鱼产生整体的柔顺变形,从而有效地降 低运动阻力、水动力噪声和传动噪声[⑧。柔性机构和柔性材料在提升仿生机器 鱼性能方面必将发挥重要的作用。 (2)新型材料的驱动特性研究 现有的仿生机器鱼多采用电机作为驱 动,而电机的理论模型、驱动技术和控制技术均较为成熟,因而无需研究其驱 动特性。而对于新型智能材料驱动的仿生机器鱼,智能材料的驱动特性是未知 的。如对于SMA驱动的仿生机器鱼,在SMA材料的驱动控制建模方面,目前 尚无建立较为适合的驱动模型,因此有必要对其进行研究。 (3)推进机理的进一步研究对鱼类推进机理的研究能够揭示其高效 高机动的流体动力学机制,为仿生机器鱼的系统设计提供理论基础。借助CFD 仿真技术可直观揭示尾鳍摆动时的流场特性和尾迹涡街的分布情况,并可研究 尾鳍运动参数对其推进性能的影响进行研究。 (4)机器鱼水动力学模型研究机器鱼动力学模型是仿生机器鱼结构 设计和控制系统设计的基础。前人提出的鱼类波状游动的流体力学模型计算量 大、过于繁琐,很难应用到实际中。从现有的文献来看,完善的、适于控制的 水动力学的模型尚未建立。 (⑤)机器鱼推进性能的提升 目前国内外研制的仿生机器鱼在推进性 能上与自然界中的鱼类仍存在较大的差异,其中有机器鱼流体阻力大、推进效 率低的原因,但也有因机器鱼游动时由尾部摆动造成的摇艏现象的原因,而对 于该现象的研究,现有的文献报道较少。若能有效克服机器鱼游动时的摇艏现 象,将能进一步提高机器鱼的推进性能。 (6)机器鱼自主游动的研究 仿生机器鱼运动于水下,最终应用于实 际时需要保证仿生机器鱼拥有足够的空间,以安装传感器和自主导航系统,实 现仿生鱼的自主或部分自主控制以能够自行应对较为复杂的水下环境。目前对 于仿生机器鱼开展自主游动的研究仍较少。 -15- 万方数据
第 1 章 绪 论 - 15 - 科研人员开始研制各式各样的仿生机器鱼。仿生机器鱼的研究成为水下推进技 术研究的热点,其涉及多学科交叉领域,由于水动力学和运动学模型尚不完善, 因而研究中可供借鉴的经验较少。从近期来看,仿生机器鱼研究要解决的具体 问题应包括以下内容: (1) 新型仿生机器鱼的研制 新型仿生机器鱼的研究是目前仿生机器 鱼研究领域的热点,对不同推进模式的鱼类的仿生研究的仍将不断持续发展下 去。此外,自然界鱼类在游动过程中有着流畅的复合柔性变形,这种柔性变形 在高速、高效的推进中发挥着至关重要的作用[8]。因此在仿生机器鱼研究中, 采用柔性机构和柔性材料可使仿生机器鱼产生整体的柔顺变形,从而有效地降 低运动阻力、水动力噪声和传动噪声[8]。柔性机构和柔性材料在提升仿生机器 鱼性能方面必将发挥重要的作用。 (2) 新型材料的驱动特性研究 现有的仿生机器鱼多采用电机作为驱 动,而电机的理论模型、驱动技术和控制技术均较为成熟,因而无需研究其驱 动特性。而对于新型智能材料驱动的仿生机器鱼,智能材料的驱动特性是未知 的。如对于 SMA 驱动的仿生机器鱼,在 SMA 材料的驱动控制建模方面,目前 尚无建立较为适合的驱动模型,因此有必要对其进行研究。 (3) 推进机理的进一步研究 对鱼类推进机理的研究能够揭示其高效 高机动的流体动力学机制,为仿生机器鱼的系统设计提供理论基础。借助 CFD 仿真技术可直观揭示尾鳍摆动时的流场特性和尾迹涡街的分布情况,并可研究 尾鳍运动参数对其推进性能的影响进行研究。 (4) 机器鱼水动力学模型研究 机器鱼动力学模型是仿生机器鱼结构 设计和控制系统设计的基础。前人提出的鱼类波状游动的流体力学模型计算量 大、过于繁琐, 很难应用到实际中。从现有的文献来看,完善的、适于控制的 水动力学的模型尚未建立。 (5) 机器鱼推进性能的提升 目前国内外研制的仿生机器鱼在推进性 能上与自然界中的鱼类仍存在较大的差异,其中有机器鱼流体阻力大、推进效 率低的原因,但也有因机器鱼游动时由尾部摆动造成的揺艏现象的原因,而对 于该现象的研究,现有的文献报道较少。若能有效克服机器鱼游动时的揺艏现 象,将能进一步提高机器鱼的推进性能。 (6) 机器鱼自主游动的研究 仿生机器鱼运动于水下,最终应用于实 际时需要保证仿生机器鱼拥有足够的空间,以安装传感器和自主导航系统,实 现仿生鱼的自主或部分自主控制以能够自行应对较为复杂的水下环境。目前对 于仿生机器鱼开展自主游动的研究仍较少。 万方数据
哈尔滨工业大学工学博士学位论文 1.5课题来源及研究的目的和意义 1.5.1课题来源 本课题受国家自然科学基金“基于静水骨骼原理的仿生乌贼水下机器人基 础研究”(项目批准号:50775049)及机器人技术与系统国家重点实验室资助项 目(项目号:SKLRS200805C)资助。 1.5.2课题研究的目的和意义 水下生物的柔性尾鳍摆动推进和柔性喷射推进均可获得较快的游动速度 和较高的推进效率,同时其柔性的动作机制具有噪音小、对环境扰动小的优势, 因此深入开展对仿生尾鳍摆动推进和仿生喷射推进技术的研究,将有望研制出 柔性、快速、高效和低噪的仿生机器鱼。 目前,国内外对于仿生机器鱼的研究尚处于起步阶段,研制仿生机器鱼的 主要目的是实现仿生游动,对机器鱼的游动实验大多止于可行性验证实验,而 较少有对机器鱼游动时的动态性能以及机器鱼的自主游动等方面进行实验研 究的,其原因为在设计机器鱼控制系统时未考虑对机器鱼运动状态检测和自主 导航功能的设计,而机器鱼的运动检测和自主游动功能的实现是其进一步走向 实用化的基础,因此有必要对其进行研究。 本课题将主要研究鱼类的尾鳍摆动推进和墨鱼的喷射推进,在对其动作机 理进行分析的基础上,研制SMA驱动的仿生尾鳍和仿生外套膜喷射推进器, 并对其推进性能进行研究,在此基础上,进一步研制尾鳍推进和喷射推进的仿 生机器鱼,并研制具有运动检测和自主导航的机器鱼控制系统,以期实现机器 鱼的自主游动。 1.6本论文的主要研究内容 本论文的主要研究内容包括以下几个方面: (1)分析鱼类尾鳍结构和动作机制,研制SMA丝驱动的可柔性弯曲摆动的 仿生尾鳍,对仿生尾鳍的驱动特性进行建模分析,并通过实验进行验证。 (2)建立仿生尾鳍的运动学模型,应用商用CFD软件提供的UDF和动网 格技术实现三维仿生尾鳍弯曲摆动的数值模拟,通过C℉D仿真研究仿生尾鳍摆 动的推进机理和推进性能,并依据仿真结果建立仿生尾鳍摆动的推进模型。 (3)搭建力学性能测试平台,对仿生尾鳍的推进性能进行测试和实验研究, -16- 万方数据
哈尔滨工业大学工学博士学位论文 - 16 - 1.5 课题来源及研究的目的和意义 1.5.1 课题来源 本课题受国家自然科学基金“基于静水骨骼原理的仿生乌贼水下机器人基 础研究”(项目批准号:50775049)及机器人技术与系统国家重点实验室资助项 目(项目号:SKLRS200805C)资助。 1.5.2 课题研究的目的和意义 水下生物的柔性尾鳍摆动推进和柔性喷射推进均可获得较快的游动速度 和较高的推进效率,同时其柔性的动作机制具有噪音小、对环境扰动小的优势, 因此深入开展对仿生尾鳍摆动推进和仿生喷射推进技术的研究,将有望研制出 柔性、快速、高效和低噪的仿生机器鱼。 目前,国内外对于仿生机器鱼的研究尚处于起步阶段,研制仿生机器鱼的 主要目的是实现仿生游动,对机器鱼的游动实验大多止于可行性验证实验,而 较少有对机器鱼游动时的动态性能以及机器鱼的自主游动等方面进行实验研 究的,其原因为在设计机器鱼控制系统时未考虑对机器鱼运动状态检测和自主 导航功能的设计,而机器鱼的运动检测和自主游动功能的实现是其进一步走向 实用化的基础,因此有必要对其进行研究。 本课题将主要研究鱼类的尾鳍摆动推进和墨鱼的喷射推进,在对其动作机 理进行分析的基础上,研制 SMA 驱动的仿生尾鳍和仿生外套膜喷射推进器, 并对其推进性能进行研究,在此基础上,进一步研制尾鳍推进和喷射推进的仿 生机器鱼,并研制具有运动检测和自主导航的机器鱼控制系统,以期实现机器 鱼的自主游动。 1.6 本论文的主要研究内容 本论文的主要研究内容包括以下几个方面: (1) 分析鱼类尾鳍结构和动作机制,研制 SMA 丝驱动的可柔性弯曲摆动的 仿生尾鳍,对仿生尾鳍的驱动特性进行建模分析,并通过实验进行验证。 (2) 建立仿生尾鳍的运动学模型,应用商用 CFD 软件提供的 UDF 和动网 格技术实现三维仿生尾鳍弯曲摆动的数值模拟,通过 CFD 仿真研究仿生尾鳍摆 动的推进机理和推进性能,并依据仿真结果建立仿生尾鳍摆动的推进模型。 (3) 搭建力学性能测试平台,对仿生尾鳍的推进性能进行测试和实验研究, 万方数据

第1章绪论 对比实验结果与仿真结果,验证仿真分析的正确性。 (4)分析乌贼外套膜的结构和动作机制,研制SMA丝驱动的仿乌贼外套膜 喷射推进器,对仿生喷射推进器的推进性能进行建模分析,并通过实验进行验 证。 (⑤)研制基于仿生尾鳍推进和基于仿生喷射推进的仿生机器鱼,在功能上 实现远程遥控和自主游动,通过实验验证仿生机器鱼的可行性。 -17- 万方数据
第 1 章 绪 论 - 17 - 对比实验结果与仿真结果,验证仿真分析的正确性。 (4) 分析乌贼外套膜的结构和动作机制,研制 SMA 丝驱动的仿乌贼外套膜 喷射推进器,对仿生喷射推进器的推进性能进行建模分析,并通过实验进行验 证。 (5) 研制基于仿生尾鳍推进和基于仿生喷射推进的仿生机器鱼,在功能上 实现远程遥控和自主游动,通过实验验证仿生机器鱼的可行性。 万方数据
哈尔滨工业大学工学博士学位论文 第2章SMA驱动的仿生尾鳍设计及其驱动特性分析 2.1引言 鱼类尾鳍推进是鱼类实现游动的主要方式之一,其摆动是一种大幅度的 柔性弯曲摆动,这种柔性弯曲摆动有助于增强牵引力和提升推进效率阿。要 模拟鱼类尾鳍这种柔性弯曲运动,传统的电机摆杆机构是无法胜任的,然而 智能材料的出现为模拟的实现提供了可能性。在各种智能材料中,SMA的性 能与生物肌肉纤维最为接近,因此本文将选择SMA作为驱动材料对仿生尾 鳍进行设计,以期实现其柔性弯曲摆动运动和结构的微型化。 本章首先借鉴鱼类尾鳍的结构设计一种基于SMA驱动的仿生尾鳍,然 后通过理论建模的方法对其驱动特性进行研究。驱动特性是指仿生尾鳍的驱 动参数与其输出摆角之间的关系。最后通过仿生尾鳍的摆动实验对所建模型 进行验证。 2.2SMA驱动的仿生尾鳍设计 2.2.1仿生学基础 鱼类主要通过尾鳍实现水中的自由游动,对于硬骨鱼来说,尾鳍承担着90% 的推力。柔性弯曲是鱼类尾鳍运动的主要特征。鱼类尾鳍在摆动过程中所展现 出的柔性弯曲如图图2-1所示。鱼类尾鳍在摆动过程中能实现大幅度的变形, 能展现出高度的柔性,这主要得益于其自身的精妙结构。 鱼类尾鳍的结构较为简单,也易于模仿。如图2-2所示为硬骨鱼尾鳍结构 的透视图,由图可知,硬骨鱼类尾鳍沿尾鳍根部到端部拥有一系列并行排列的 鳍条,鳍条之间通过较为柔软的胶原鳍膜进行连接,整个尾鳍鳍面便由鳍条和 胶原鳍膜构成。 柔性弯曲 图2-1鱼类尾鳍运动中的柔性弯曲 Fig.2-1 Flexible bending of the fish caudal fin -18- 万方数据
哈尔滨工业大学工学博士学位论文 - 18 - 第 2 章 SMA 驱动的仿生尾鳍设计及其驱动特性分析 2.1 引言 鱼类尾鳍推进是鱼类实现游动的主要方式之一,其摆动是一种大幅度的 柔性弯曲摆动,这种柔性弯曲摆动有助于增强牵引力和提升推进效率[6]。要 模拟鱼类尾鳍这种柔性弯曲运动,传统的电机摆杆机构是无法胜任的,然而 智能材料的出现为模拟的实现提供了可能性。在各种智能材料中,SMA 的性 能与生物肌肉纤维最为接近,因此本文将选择 SMA 作为驱动材料对仿生尾 鳍进行设计,以期实现其柔性弯曲摆动运动和结构的微型化。 本章首先借鉴鱼类尾鳍的结构设计一种基于 SMA 驱动的仿生尾鳍,然 后通过理论建模的方法对其驱动特性进行研究。驱动特性是指仿生尾鳍的驱 动参数与其输出摆角之间的关系。最后通过仿生尾鳍的摆动实验对所建模型 进行验证。 2.2 SMA 驱动的仿生尾鳍设计 2.2.1 仿生学基础 鱼类主要通过尾鳍实现水中的自由游动,对于硬骨鱼来说,尾鳍承担着 90% 的推力。柔性弯曲是鱼类尾鳍运动的主要特征。鱼类尾鳍在摆动过程中所展现 出的柔性弯曲如图图 2-1 所示。鱼类尾鳍在摆动过程中能实现大幅度的变形, 能展现出高度的柔性,这主要得益于其自身的精妙结构。 鱼类尾鳍的结构较为简单,也易于模仿。如图 2-2 所示为硬骨鱼尾鳍结构 的透视图,由图可知,硬骨鱼类尾鳍沿尾鳍根部到端部拥有一系列并行排列的 鳍条,鳍条之间通过较为柔软的胶原鳍膜进行连接,整个尾鳍鳍面便由鳍条和 胶原鳍膜构成。 柔性弯曲 图 2-1 鱼类尾鳍运动中的柔性弯曲 Fig. 2-1 Flexible bending of the fish caudal fin 万方数据