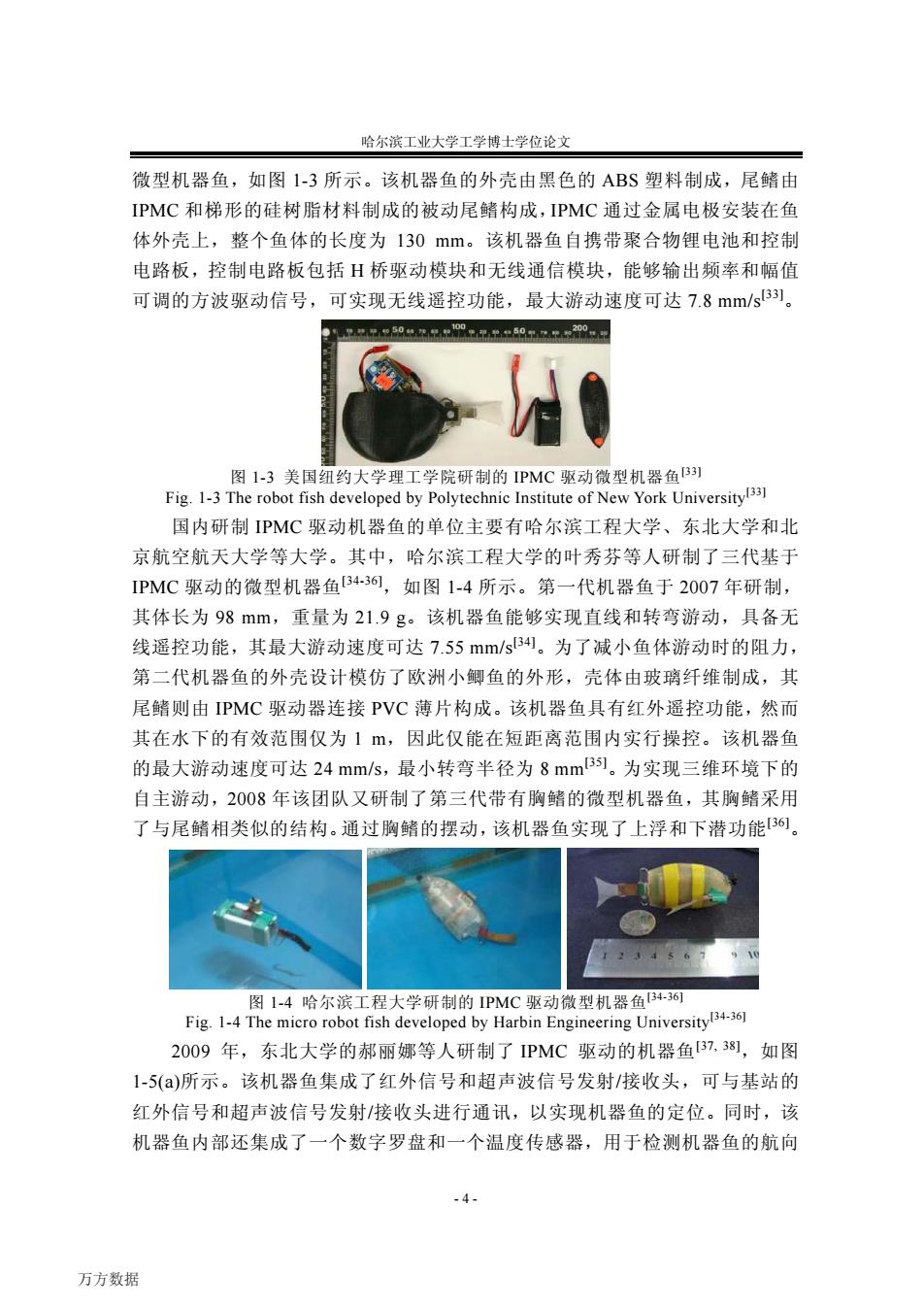
哈尔滨工业大学工学博士学位论文 微型机器鱼,如图1-3所示。该机器鱼的外壳由黑色的ABS塑料制成,尾鳍由 IPMC和梯形的硅树脂材料制成的被动尾鳍构成,IPMC通过金属电极安装在鱼 体外壳上,整个鱼体的长度为130mm。该机器鱼自携带聚合物锂电池和控制 电路板,控制电路板包括H桥驱动模块和无线通信模块,能够输出频率和幅值 可调的方波驱动信号,可实现无线遥控功能,最大游动速度可达7.8mm/sB3)。 图1-3美国纽约大学理工学院研制的PMC驱动微型机器鱼B] Fig.1-3 The robot fish developed by Polytechnic Institute of New York Universityl331 国内研制PMC驱动机器鱼的单位主要有哈尔滨工程大学、东北大学和北 京航空航天大学等大学。其中,哈尔滨工程大学的叶秀芬等人研制了三代基于 IPMC驱动的微型机器鱼[B4-3,如图1-4所示。第一代机器鱼于2007年研制, 其体长为98mm,重量为21.9g。该机器鱼能够实现直线和转弯游动,具备无 线遥控功能,其最大游动速度可达7.55mms34)。为了减小鱼体游动时的阻力, 第二代机器鱼的外壳设计模仿了欧洲小鲫鱼的外形,壳体由玻璃纤维制成,其 尾鳍则由IPMC驱动器连接PVC薄片构成。该机器鱼具有红外遥控功能,然而 其在水下的有效范围仅为1m,因此仅能在短距离范围内实行操控。该机器鱼 的最大游动速度可达24mm/s,最小转弯半径为8mm3]。为实现三维环境下的 自主游动,2008年该团队又研制了第三代带有胸鳍的微型机器鱼,其胸鳍采用 了与尾鳍相类似的结构。通过胸鳍的摆动,该机器鱼实现了上浮和下潜功能36。 图1-4哈尔滨工程大学研制的PMC驱动微型机器鱼B43 Fig.1-4 The micro robot fish developed by Harbin Engineering University4- 2009年,东北大学的郝丽娜等人研制了IPMC驱动的机器鱼[B7,38),如图 1-5(a)所示。该机器鱼集成了红外信号和超声波信号发射/接收头,可与基站的 红外信号和超声波信号发射/接收头进行通讯,以实现机器鱼的定位。同时,该 机器鱼内部还集成了一个数字罗盘和一个温度传感器,用于检测机器鱼的航向 -4- 万方数据
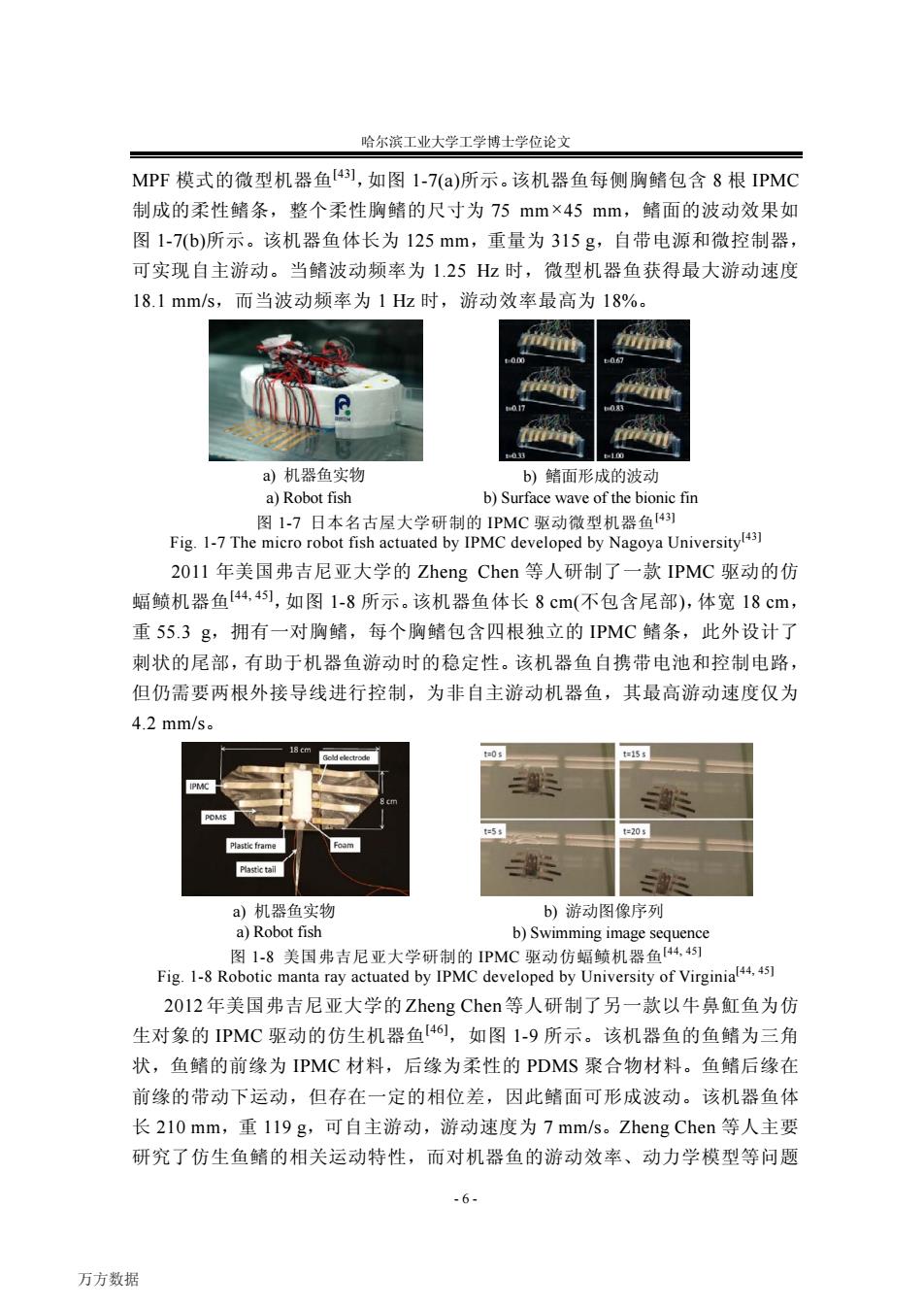
哈尔滨工业大学工学博士学位论文 - 4 - 微型机器鱼,如图 1-3 所示。该机器鱼的外壳由黑色的 ABS 塑料制成,尾鳍由 IPMC 和梯形的硅树脂材料制成的被动尾鳍构成,IPMC 通过金属电极安装在鱼 体外壳上,整个鱼体的长度为 130 mm。该机器鱼自携带聚合物锂电池和控制 电路板,控制电路板包括 H 桥驱动模块和无线通信模块,能够输出频率和幅值 可调的方波驱动信号,可实现无线遥控功能,最大游动速度可达 7.8 mm/s[33]。 图 1-3 美国纽约大学理工学院研制的 IPMC 驱动微型机器鱼[33] Fig. 1-3 The robot fish developed by Polytechnic Institute of New York University[33] 国内研制 IPMC 驱动机器鱼的单位主要有哈尔滨工程大学、东北大学和北 京航空航天大学等大学。其中,哈尔滨工程大学的叶秀芬等人研制了三代基于 IPMC 驱动的微型机器鱼[34-36],如图 1-4 所示。第一代机器鱼于 2007 年研制, 其体长为 98 mm,重量为 21.9 g。该机器鱼能够实现直线和转弯游动,具备无 线遥控功能,其最大游动速度可达 7.55 mm/s[34]。为了减小鱼体游动时的阻力, 第二代机器鱼的外壳设计模仿了欧洲小鲫鱼的外形,壳体由玻璃纤维制成,其 尾鳍则由 IPMC 驱动器连接 PVC 薄片构成。该机器鱼具有红外遥控功能,然而 其在水下的有效范围仅为 1 m,因此仅能在短距离范围内实行操控。该机器鱼 的最大游动速度可达 24 mm/s,最小转弯半径为 8 mm[35]。为实现三维环境下的 自主游动,2008 年该团队又研制了第三代带有胸鳍的微型机器鱼,其胸鳍采用 了与尾鳍相类似的结构。通过胸鳍的摆动,该机器鱼实现了上浮和下潜功能[36]。 图 1-4 哈尔滨工程大学研制的 IPMC 驱动微型机器鱼[34-36] Fig. 1-4 The micro robot fish developed by Harbin Engineering University[34-36] 2009 年,东北大学的郝丽娜等人研制了 IPMC 驱动的机器鱼[37, 38],如图 1-5(a)所示。该机器鱼集成了红外信号和超声波信号发射/接收头,可与基站的 红外信号和超声波信号发射/接收头进行通讯,以实现机器鱼的定位。同时,该 机器鱼内部还集成了一个数字罗盘和一个温度传感器,用于检测机器鱼的航向 万方数据
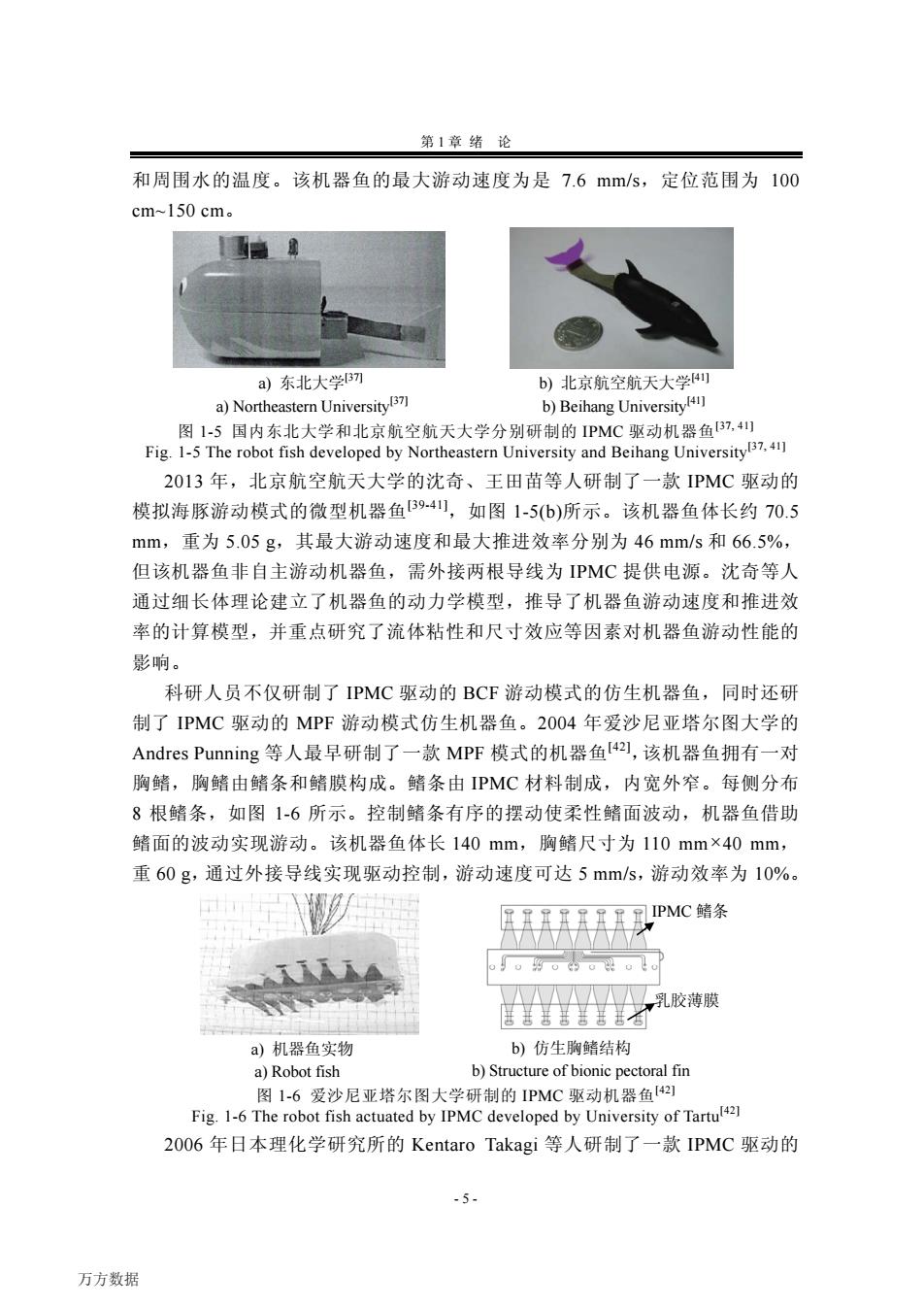
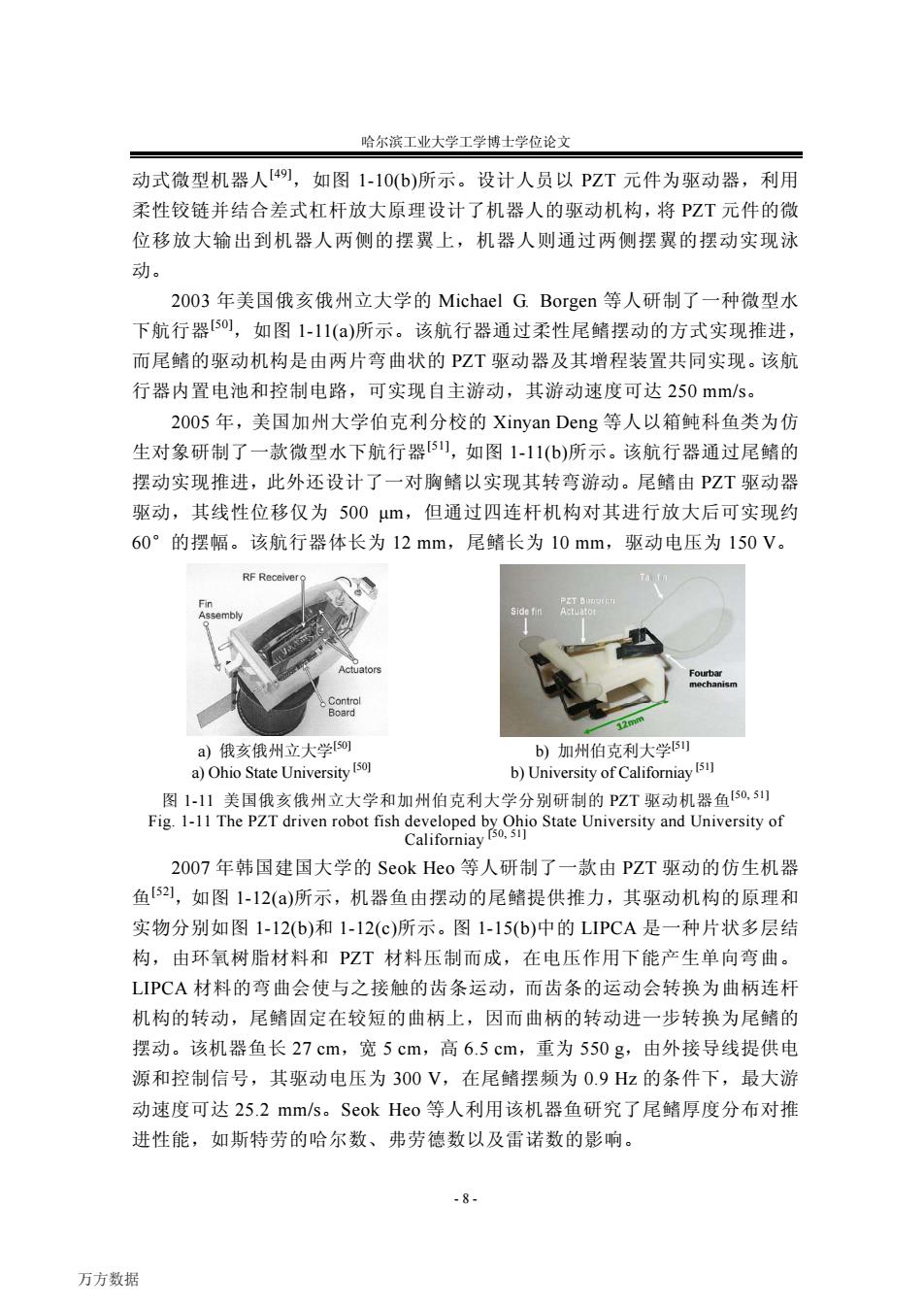
第1章绪论 和周围水的温度。该机器鱼的最大游动速度为是7.6mm/s,定位范围为100 cm~150cm。 a)东北大学B7 b)北京航空航天大学4 a)Northeastern University37) b)Beihang University4 图1-5国内东北大学和北京航空航天大学分别研制的PMC驱动机器鱼B7,4) Fig.1-5 The robot fish developed by Northeastern University and Beihang University7. 2013年,北京航空航天大学的沈奇、王田苗等人研制了一款IPMC驱动的 模拟海豚游动模式的微型机器鱼94,如图1-5b)所示。该机器鱼体长约70.5 mm,重为5.05g,其最大游动速度和最大推进效率分别为46mm/s和66.5%, 但该机器鱼非自主游动机器鱼,需外接两根导线为IPMC提供电源。沈奇等人 通过细长体理论建立了机器鱼的动力学模型,推导了机器鱼游动速度和推进效 率的计算模型,并重点研究了流体粘性和尺寸效应等因素对机器鱼游动性能的 影响。 科研人员不仅研制了IPMC驱动的BCF游动模式的仿生机器鱼,同时还研 制了IPMC驱动的MPF游动模式仿生机器鱼。2004年爱沙尼亚塔尔图大学的 Andres Punning等人最早研制了一款MPF模式的机器鱼[42],该机器鱼拥有一对 胸鳍,胸鳍由鳍条和鳍膜构成。鳍条由PMC材料制成,内宽外窄。每侧分布 8根鳍条,如图1-6所示。控制鳍条有序的摆动使柔性鳍面波动,机器鱼借助 鳍面的波动实现游动。该机器鱼体长140mm,胸鳍尺寸为110mm×40mm, 重60g,通过外接导线实现驱动控制,游动速度可达5mm/s,游动效率为10%。 日开r日PMC鳍条 图了孔胶移酸 a)机器鱼实物 b)仿生胸鳍结构 a)Robot fish b)Structure of bionic pectoral fin 图1-6爱沙尼亚塔尔图大学研制的IPMC驱动机器鱼2) Fig.1-6 The robot fish actuated by IPMC developed by University of Tartul42 2006年日本理化学研究所的Kentaro Takagi等人研制了一款IPMC驱动的 -5- 万方数据
第 1 章 绪 论 - 5 - 和周围水的温度。该机器鱼的最大游动速度为是 7.6 mm/s,定位范围为 100 cm~150 cm。 a) 东北大学[37] a) Northeastern University[37] b) 北京航空航天大学[41] b) Beihang University[41] 图 1-5 国内东北大学和北京航空航天大学分别研制的 IPMC 驱动机器鱼[37, 41] Fig. 1-5 The robot fish developed by Northeastern University and Beihang University[37, 41] 2013 年,北京航空航天大学的沈奇、王田苗等人研制了一款 IPMC 驱动的 模拟海豚游动模式的微型机器鱼[39-41],如图 1-5(b)所示。该机器鱼体长约 70.5 mm,重为 5.05 g,其最大游动速度和最大推进效率分别为 46 mm/s 和 66.5%, 但该机器鱼非自主游动机器鱼,需外接两根导线为 IPMC 提供电源。沈奇等人 通过细长体理论建立了机器鱼的动力学模型,推导了机器鱼游动速度和推进效 率的计算模型,并重点研究了流体粘性和尺寸效应等因素对机器鱼游动性能的 影响。 科研人员不仅研制了 IPMC 驱动的 BCF 游动模式的仿生机器鱼,同时还研 制了 IPMC 驱动的 MPF 游动模式仿生机器鱼。2004 年爱沙尼亚塔尔图大学的 Andres Punning 等人最早研制了一款 MPF 模式的机器鱼[42],该机器鱼拥有一对 胸鳍,胸鳍由鳍条和鳍膜构成。鳍条由 IPMC 材料制成,内宽外窄。每侧分布 8 根鳍条,如图 1-6 所示。控制鳍条有序的摆动使柔性鳍面波动,机器鱼借助 鳍面的波动实现游动。该机器鱼体长 140 mm,胸鳍尺寸为 110 mm×40 mm, 重 60 g,通过外接导线实现驱动控制,游动速度可达 5 mm/s,游动效率为 10%。 a) 机器鱼实物 a) Robot fish IPMC 鳍条 乳胶薄膜 b) 仿生胸鳍结构 b) Structure of bionic pectoral fin 图 1-6 爱沙尼亚塔尔图大学研制的 IPMC 驱动机器鱼[42] Fig. 1-6 The robot fish actuated by IPMC developed by University of Tartu[42] 2006 年日本理化学研究所的 Kentaro Takagi 等人研制了一款 IPMC 驱动的 万方数据
哈尔滨工业大学工学博士学位论文 MPF模式的微型机器鱼4),如图1-7(a)所示。该机器鱼每侧胸鳍包含8根IPMC 制成的柔性鳍条,整个柔性胸鳍的尺寸为75mm×45mm,鳍面的波动效果如 图1-7(b)所示。该机器鱼体长为125mm,重量为315g,自带电源和微控制器, 可实现自主游动。当鳍波动频率为1.25Hz时,微型机器鱼获得最大游动速度 18.1mm/s,而当波动频率为1Hz时,游动效率最高为18%。 a)机器鱼实物 b)鳍面形成的波动 a)Robot fish b)Surface wave of the bionic fin 图1-7日本名古屋大学研制的IPMC驱动微型机器鱼43) Fig.1-7The micro robot fish actuated by IPMC developed by Nagoya University4 20l1年美国弗吉尼亚大学的Zheng Chen等人研制了一款IPMC驱动的仿 蝠鲼机器鱼44,4,如图1-8所示。该机器鱼体长8cm(不包含尾部),体宽18cm, 重55.3g,拥有一对胸鳍,每个胸鳍包含四根独立的IPMC鳍条,此外设计了 刺状的尾部,有助于机器鱼游动时的稳定性。该机器鱼自携带电池和控制电路, 但仍需要两根外接导线进行控制,为非自主游动机器鱼,其最高游动速度仅为 4.2mm/s。 18 cm t=0s t=15s IPMC t=5s t205 p时astic frame Plas时tic tail a)机器鱼实物 b)游动图像序列 a)Robot fish b)Swimming image sequence 图1-8美国弗吉尼亚大学研制的PMC驱动仿蝠鲼机器鱼[4,45 Fig.1-8 Robotic manta ray actuated by IPMC developed by University of Virginia451 2012年美国弗吉尼亚大学的Zheng Chen等人研制了另一款以牛鼻魟鱼为仿 生对象的PMC驱动的仿生机器鱼46,如图1-9所示。该机器鱼的鱼鳍为三角 状,鱼鳍的前缘为IPMC材料,后缘为柔性的PDMS聚合物材料。鱼鳍后缘在 前缘的带动下运动,但存在一定的相位差,因此鳍面可形成波动。该机器鱼体 长210mm,重119g,可自主游动,游动速度为7mm/s。Zheng Chen等人主要 研究了仿生鱼鳍的相关运动特性,而对机器鱼的游动效率、动力学模型等问题 -6- 万方数据
哈尔滨工业大学工学博士学位论文 - 6 - MPF 模式的微型机器鱼[43],如图 1-7(a)所示。该机器鱼每侧胸鳍包含 8 根 IPMC 制成的柔性鳍条,整个柔性胸鳍的尺寸为 75 mm×45 mm,鳍面的波动效果如 图 1-7(b)所示。该机器鱼体长为 125 mm,重量为 315 g,自带电源和微控制器, 可实现自主游动。当鳍波动频率为 1.25 Hz 时,微型机器鱼获得最大游动速度 18.1 mm/s,而当波动频率为 1 Hz 时,游动效率最高为 18%。 a) 机器鱼实物 a) Robot fish b) 鳍面形成的波动 b) Surface wave of the bionic fin 图 1-7 日本名古屋大学研制的 IPMC 驱动微型机器鱼[43] Fig. 1-7 The micro robot fish actuated by IPMC developed by Nagoya University[43] 2011 年美国弗吉尼亚大学的 Zheng Chen 等人研制了一款 IPMC 驱动的仿 蝠鲼机器鱼[44, 45],如图 1-8 所示。该机器鱼体长 8 cm(不包含尾部),体宽 18 cm, 重 55.3 g,拥有一对胸鳍,每个胸鳍包含四根独立的 IPMC 鳍条,此外设计了 刺状的尾部,有助于机器鱼游动时的稳定性。该机器鱼自携带电池和控制电路, 但仍需要两根外接导线进行控制,为非自主游动机器鱼,其最高游动速度仅为 4.2 mm/s。 a) 机器鱼实物 a) Robot fish b) 游动图像序列 b) Swimming image sequence 图 1-8 美国弗吉尼亚大学研制的 IPMC 驱动仿蝠鲼机器鱼[44, 45] Fig. 1-8 Robotic manta ray actuated by IPMC developed by University of Virginia[44, 45] 2012年美国弗吉尼亚大学的 Zheng Chen等人研制了另一款以牛鼻魟鱼为仿 生对象的 IPMC 驱动的仿生机器鱼[46],如图 1-9 所示。该机器鱼的鱼鳍为三角 状,鱼鳍的前缘为 IPMC 材料,后缘为柔性的 PDMS 聚合物材料。鱼鳍后缘在 前缘的带动下运动,但存在一定的相位差,因此鳍面可形成波动。该机器鱼体 长 210 mm,重 119 g,可自主游动,游动速度为 7 mm/s。Zheng Chen 等人主要 研究了仿生鱼鳍的相关运动特性,而对机器鱼的游动效率、动力学模型等问题 万方数据

第1章绪论 缺乏研究。 33 cm Top view From view Printed body a)机器鱼实物 b)游动图片 a)Robot fish b)Photo of Swimming 图1-9美国弗吉尼亚大学研制的PMC驱动仿牛鼻魟鱼机器鱼46 Fig.1-9 Robotic cownose ray actuated by IPMC developed by University of Virginia 1.2.2PZT驱动的仿生机器鱼 PZT是一种新型功能陶瓷材料,它能够将机械能和电能相互转换。压电陶 瓷能实现正压电效应和逆压电效应,正压电效应为若对压电材料施加一定的压 力,它便会产生一定的电位差,而逆压电效应为对其施加电压,它能输出应力 和应变6。压电驱动器正是利用其逆压电效应,将电能转化为机械能,从而输 出一定的应力和应变。压电驱动器在工程中得到了广泛应用。然而其驱动电压 较高(一般为50-800V),并且变形量较小,仅为其自身尺寸的千分之一47刀,因 而较少应用于仿生水下机器人设计。 a)名古屋大学48 b)广东工业大学4 a)Nagoya University4 b)Guangdong University of Technology4 图1-10日本名古屋大学和广东工业大学分别研制的PZT驱动机器鱼48,4] Fig.1-10 The PZT driven robot fish developed by Nagoya University and Guangdong University of Technology 1995年日本名古屋大学的Toshio F'UKUDA等人最早研制了一款PZT驱动 的微型机器鱼48],如图1-10(a)所示。设计人员设计了一种放大机构,能将PZT 的微小位移量放大250倍,从而驱动鱼体两侧双鳍实现摆动。该机器鱼体长为 32mm,最高游动速度可达32.5mm/s,其驱动电压为150V,为有缆控制。2001 年国内广东工业大学的钟映春等人研制了一款PZT驱动的应用于微管道的泳 -7- 万方数据
第 1 章 绪 论 - 7 - 缺乏研究。 a) 机器鱼实物 a) Robot fish b) 游动图片 b) Photo of Swimming 图 1-9 美国弗吉尼亚大学研制的 IPMC 驱动仿牛鼻魟鱼机器鱼[46] Fig. 1-9 Robotic cownose ray actuated by IPMC developed by University of Virginia[46] 1.2.2 PZT 驱动的仿生机器鱼 PZT 是一种新型功能陶瓷材料,它能够将机械能和电能相互转换。压电陶 瓷能实现正压电效应和逆压电效应,正压电效应为若对压电材料施加一定的压 力,它便会产生一定的电位差,而逆压电效应为对其施加电压,它能输出应力 和应变[16]。压电驱动器正是利用其逆压电效应,将电能转化为机械能,从而输 出一定的应力和应变。压电驱动器在工程中得到了广泛应用。然而其驱动电压 较高(一般为 50-800 V),并且变形量较小,仅为其自身尺寸的千分之一[47],因 而较少应用于仿生水下机器人设计。 a) 名古屋大学[48] a) Nagoya University [48] b) 广东工业大学[49] b) Guangdong University of Technology [49] 图 1-10 日本名古屋大学和广东工业大学分别研制的 PZT 驱动机器鱼[48, 49] Fig. 1-10 The PZT driven robot fish developed by Nagoya University and Guangdong University of Technology [48, 49] 1995 年日本名古屋大学的 Toshio F'UKUDA 等人最早研制了一款 PZT 驱动 的微型机器鱼[48],如图 1-10(a)所示。设计人员设计了一种放大机构,能将 PZT 的微小位移量放大 250 倍,从而驱动鱼体两侧双鳍实现摆动。该机器鱼体长为 32 mm,最高游动速度可达 32.5 mm/s,其驱动电压为 150 V,为有缆控制。2001 年国内广东工业大学的钟映春等人研制了一款 PZT 驱动的应用于微管道的泳 万方数据
哈尔滨工业大学工学博士学位论文 动式微型机器人49),如图1-10(b)所示。设计人员以PZT元件为驱动器,利用 柔性铰链并结合差式杠杆放大原理设计了机器人的驱动机构,将PZT元件的微 位移放大输出到机器人两侧的摆翼上,机器人则通过两侧摆翼的摆动实现泳 动。 2003年美国俄亥俄州立大学的Michael G.Borgen等人研制了一种微型水 下航行器50),如图1-ll(a)所示。该航行器通过柔性尾鳍摆动的方式实现推进, 而尾鳍的驱动机构是由两片弯曲状的PZT驱动器及其增程装置共同实现。该航 行器内置电池和控制电路,可实现自主游动,其游动速度可达250mm/s。 2005年,美国加州大学伯克利分校的Xinyan Deng等人以箱鲀科鱼类为仿 生对象研制了一款微型水下航行器51,如图1-11(b)所示。该航行器通过尾鳍的 摆动实现推进,此外还设计了一对胸鳍以实现其转弯游动。尾鳍由PZT驱动器 驱动,其线性位移仅为500m,但通过四连杆机构对其进行放大后可实现约 60°的摆幅。该航行器体长为12mm,尾鳍长为10mm,驱动电压为150V。 Fin PZT(E Side t uators a)俄亥俄州立大学[5o] b)加州伯克利大学5例 a)Ohio State University5 b)University of Californiay 图1-11美国俄亥俄州立大学和加州伯克利大学分别研制的PZT驱动机器鱼50,5) Fig.1-11 The PZT driven robot fish developed by Ohio State University and University of Californiay (50.51 2007年韩国建国大学的Seok Heo等人研制了一款由PZT驱动的仿生机器 鱼[52],如图1-12(a)所示,机器鱼由摆动的尾鳍提供推力,其驱动机构的原理和 实物分别如图1-12(b)和1-12(c)所示。图1-15(b)中的LIPCA是一种片状多层结 构,由环氧树脂材料和PZT材料压制而成,在电压作用下能产生单向弯曲。 LIPCA材料的弯曲会使与之接触的齿条运动,而齿条的运动会转换为曲柄连杆 机构的转动,尾鳍固定在较短的曲柄上,因而曲柄的转动进一步转换为尾鳍的 摆动。该机器鱼长27cm,宽5cm,高6.5cm,重为550g,由外接导线提供电 源和控制信号,其驱动电压为300V,在尾鳍摆频为0.9Hz的条件下,最大游 动速度可达25.2mm/s。Seok Heo等人利用该机器鱼研究了尾鳍厚度分布对推 进性能,如斯特劳的哈尔数、弗劳德数以及雷诺数的影响。 -8- 万方数据
哈尔滨工业大学工学博士学位论文 - 8 - 动式微型机器人[49],如图 1-10(b)所示。设计人员以 PZT 元件为驱动器,利用 柔性铰链并结合差式杠杆放大原理设计了机器人的驱动机构,将 PZT 元件的微 位移放大输出到机器人两侧的摆翼上,机器人则通过两侧摆翼的摆动实现泳 动。 2003 年美国俄亥俄州立大学的 Michael G. Borgen 等人研制了一种微型水 下航行器[50],如图 1-11(a)所示。该航行器通过柔性尾鳍摆动的方式实现推进, 而尾鳍的驱动机构是由两片弯曲状的 PZT 驱动器及其增程装置共同实现。该航 行器内置电池和控制电路,可实现自主游动,其游动速度可达 250 mm/s。 2005 年,美国加州大学伯克利分校的 Xinyan Deng 等人以箱鲀科鱼类为仿 生对象研制了一款微型水下航行器[51],如图 1-11(b)所示。该航行器通过尾鳍的 摆动实现推进,此外还设计了一对胸鳍以实现其转弯游动。尾鳍由 PZT 驱动器 驱动,其线性位移仅为 500 μm,但通过四连杆机构对其进行放大后可实现约 60°的摆幅。该航行器体长为 12 mm,尾鳍长为 10 mm,驱动电压为 150 V。 a) 俄亥俄州立大学[50] a) Ohio State University [50] b) 加州伯克利大学[51] b) University of Californiay [51] 图 1-11 美国俄亥俄州立大学和加州伯克利大学分别研制的 PZT 驱动机器鱼[50, 51] Fig. 1-11 The PZT driven robot fish developed by Ohio State University and University of Californiay [50, 51] 2007 年韩国建国大学的 Seok Heo 等人研制了一款由 PZT 驱动的仿生机器 鱼[52],如图 1-12(a)所示,机器鱼由摆动的尾鳍提供推力,其驱动机构的原理和 实物分别如图 1-12(b)和 1-12(c)所示。图 1-15(b)中的 LIPCA 是一种片状多层结 构,由环氧树脂材料和 PZT 材料压制而成,在电压作用下能产生单向弯曲。 LIPCA 材料的弯曲会使与之接触的齿条运动,而齿条的运动会转换为曲柄连杆 机构的转动,尾鳍固定在较短的曲柄上,因而曲柄的转动进一步转换为尾鳍的 摆动。该机器鱼长 27 cm,宽 5 cm,高 6.5 cm,重为 550 g,由外接导线提供电 源和控制信号,其驱动电压为 300 V,在尾鳍摆频为 0.9 Hz 的条件下,最大游 动速度可达 25.2 mm/s。Seok Heo 等人利用该机器鱼研究了尾鳍厚度分布对推 进性能,如斯特劳的哈尔数、弗劳德数以及雷诺数的影响。 万方数据