Contents 3.2.2 Implementation of dynamic mesh .37 3.2.3 Solver settings......... 39 3.3 Analysis of simulation results and the propulsion model of the caudal fin....39 3.3.1 Analysis of simulation results........ .39 3.3.2 The time-varying propulsion model of the caudal fin 43 3.4 CFD simulation reasearch on the twin caudal fin propulsion performance...46 3.4.1 Simulation model of the twin-caudal fin............................. .47 3.4.2 Analysis of simulation results.... 47 3.5 Experimental verification.51 3..IEexperimental system5. 3.5.2Propulsion experiment.5.4 3.6 Summary.. 59 Chapter 4 The design,theorectical analysis and experimental research of the V type arrangement bionic mantle....... 60 4.1 Introduction........... 60 4.2 The bionic mantle jet propeller and"V"type arrangement bionic mantle....60 4.2.1 The bionic mantle jet propeller................ .60 4.2.2Vtype arrangement bionic mantle61 4.3 Movement theory of the "V"type arrangement bionic mantle. …… 62 4.3.1 Geometric model............. 62 4.3.2 Mechanical model..... 65 4.3.3 Cavity pressure and jet thrust model.................... 67 4.3.4 Themodynamic model and Brinson constitutive model of SMA .67 4.3.5 Example analysis....... 68 4.4 Experimental research on the bionic mantle 71 4.4.1 Physical of the bionic mantle jet propeller................... 71 4.4.2 Movement experiment.... 72 4.4.3 Jet thrust experiment. .74 4.5 Summary… 76 Chapter 5 The design and experimental research of th caudual fin propulsion and jet propulsion robot fish. 77 5.1 Introduction............. 77 5.2 Design and dynamic analysis of the micro robot fish with caudal fin...........77 5.2.1 Structure design. 77 5.2.2 The drag model 78 5.2.3 The dynamic model... 80 5.2.4 The dynamic simulation............... 82 -X- 万方数据
Contents - IX - 3.2.2 Implementation of dynamic mesh ...........................................................37 3.2.3 Solver settings.........................................................................................39 3.3 Analysis of simulation results and the propulsion model of the caudal fin.... 39 3.3.1 Analysis of simulation results .................................................................39 3.3.2 The time-varying propulsion model of the caudal fin .............................43 3.4 CFD simulation reasearch on the twin caudal fin propulsion performance ... 46 3.4.1 Simulation model of the twin-caudal fin .................................................47 3.4.2 Analysis of simulation results .................................................................47 3.5 Experimental verification......................................................................... 51 3.5.1 Eexperimental system .............................................................................51 3.5.2 Propulsion experiment.............................................................................54 3.6 Summary ................................................................................................ 59 Chapter 4 The design, theorectical analysis and experimental research of the V type arrangement bionic mantle ...........................................................................60 4.1 Introduction ............................................................................................ 60 4.2 The bionic mantle jet propeller and “V” type arrangement bionic mantle .... 60 4.2.1 The bionic mantle jet propeller ...............................................................60 4.2.2 V type arrangement bionic mantle...........................................................61 4.3 Movement theory of the “V” type arrangement bionic mantle..................... 62 4.3.1 Geometric model.....................................................................................62 4.3.2 Mechanical model ...................................................................................65 4.3.3 Cavity pressure and jet thrust model .......................................................67 4.3.4 Themodynamic model and Brinson constitutive model of SMA.............67 4.3.5 Example analysis.....................................................................................68 4.4 Experimental research on the bionic mantle .............................................. 71 4.4.1 Physical of the bionic mantle jet propeller..............................................71 4.4.2 Movement experiment.............................................................................72 4.4.3 Jet thrust experiment ...............................................................................74 4.5 Summary ................................................................................................ 76 Chapter 5 The design and experimental research of th caudual fin propulsion and jet propulsion robot fish.................................................................................77 5.1 Introduction ............................................................................................ 77 5.2 Design and dynamic analysis of the micro robot fish with caudal fin........... 77 5.2.1 Structure design.......................................................................................77 5.2.2 The drag model .......................................................................................78 5.2.3 The dynamic model .................................................................................80 5.2.4 The dynamic simulation ..........................................................................82 万方数据
哈尔滨工业大学工学博士学位论文 5.3 The control system design of the robot fish 85 5.3.1 Inertial navigation principle and algorithm 85 5.3.2 The hardware design.. 87 5.3.3 The program design...... 89 5.4 Swimming experiment of the robot fish with caudal fin propulsion.............91 5.4.IThe prototype ofthe robot fish.91 5.4.2 Straight line swimming................ 92 5.4.3 Turn swimming… .96 5.4.4 Self-propelled swimming. 97 5.5 Swimming experiment of the robot fish with jet propulsion....................... 99 5.5.IThe prototype of the robot fish..99 5.5.2 Swimming experiment. 99 5.6 Summary............ 102 Conclusions ........ 103 References.… 106 Papers published in the period of ph.d.Education....115 Statement of copyright and letter of authorization 116 Ackn0 wledgements.… 117 Restme.19 -X- 万方数据
哈尔滨工业大学工学博士学位论文 - X - 5.3 The control system design of the robot fish ............................................... 85 5.3.1 Inertial navigation principle and algorithm .............................................85 5.3.2 The hardware design ...............................................................................87 5.3.3 The program design.................................................................................89 5.4 Swimming experiment of the robot fish with caudal fin propulsion............. 91 5.4.1 The prototype of the robot fish................................................................91 5.4.2 Straight line swimming ...........................................................................92 5.4.3 Turn swimming .......................................................................................96 5.4.4 Self-propelled swimming ........................................................................97 5.5 Swimming experiment of the robot fish with jet propulsion........................ 99 5.5.1 The prototype of the robot fish................................................................99 5.5.2 Swimming experiment ............................................................................99 5.6 Summary .............................................................................................. 102 Conclusions ..........................................................................................................103 References.............................................................................................................106 Papers published in the period of ph.d. Education ........................................... 115 Statement of copyright and letter of authorization ........................................... 116 Acknowledgements .............................................................................................. 117 Resume.................................................................................................................. 119 万方数据

第1章绪论 第1章绪论 1.1引言 约占地球表面积71%的海洋中蕴藏着极为丰富的海洋资源,包括生物资源、 矿产资源以及能源资源等。随着陆地资源的日益减少和枯竭,人类开发和利 用海洋资源的步伐将随着资源需求的日益增加和科学技术的快速进步而日益 加快☒。水下机器人是人类探索、开发和利用海洋资源的重要工具,有着广阔 的应用前景和潜在的应用价值,因此吸引了科研人员越来越多的注意力。 水下机器人技术涉及到多学科和多技术领域的知识,但关键技术之一是水 下推进技术4。传统的水下机器人多采用螺旋桨推进,存在着结构复杂、体积 大,对环境扰动大,噪声大,推进效率低以及动作灵活性和隐蔽性差等缺点5-8。 而海洋中的水生生物经过漫长的自然进化,发展出了各具特色的游动方式和非 凡的游动能力,不仅能够以低能耗和高效率来实现长距离的巡游,而且还可在 快速游动中实现快速的机动响应,因此科研人员纷纷展开了对各种水下生物推 进机理以及相关仿生水下推进技术的研究,希望藉此能够研制出高效率、低噪 声以及高机动性的仿生水下机器人9,11。 鱼类是海洋生物的主体,其推进模式主要分两类,一类是通过尾鳍摆动实 现推进的BC℉推进模式,另一类则是通过长鳍波动来实现推进的MP℉推进模 式[l]。其中BCF推进模式的优势是快速性和高效性,而MPF推进模式的优 势是机动性和稳定性4。目前,国内外研制的仿生机器鱼大多模拟鱼类的这两 种推进模式。墨鱼是一种奇特的海洋生物,它采用喷射的方式实现推进,即通 过其外套膜的快速收缩将腔内的水直接由喷嘴处向后迅速喷出,从而形成强劲 的推进力,墨鱼藉此获得了非凡的游动能力,其游动能力可与鱼类中的佼佼者 相媲美。因此,若能成功模拟墨鱼的喷射推进机制,将有望研制出一种可提供 强劲推进力的仿生喷射推进器,若将其应用于仿生机器鱼,将有望提升机器鱼 的游动速度和推进效率,同时也可为研制新型水下推进器提供新思路和新途 径。 目前,国内外研制的仿生机器鱼大多采用电机作为驱动,存在结构复杂、 体积大、动作有噪音,且难以模拟水生生物的柔性动作等缺点[6,刀。为解决上述 问题,科研人员开始研制智能材料驱动的仿生机器鱼。智能材料是一种集感知 和驱动为一体的新型功能材料,它们以良好的变形特性为人们提供了一种全新 的驱动方式5,16),也为仿生机器鱼的驱动设计提供了新途径。 万方数据
第 1 章 绪 论 - 1 - 第 1 章 绪 论 1.1 引言 约占地球表面积 71%的海洋中蕴藏着极为丰富的海洋资源,包括生物资源、 矿产资源以及能源资源等[1]。随着陆地资源的日益减少和枯竭,人类开发和利 用海洋资源的步伐将随着资源需求的日益增加和科学技术的快速进步而日益 加快[2]。水下机器人是人类探索、开发和利用海洋资源的重要工具,有着广阔 的应用前景和潜在的应用价值,因此吸引了科研人员越来越多的注意力[3]。 水下机器人技术涉及到多学科和多技术领域的知识,但关键技术之一是水 下推进技术[4]。传统的水下机器人多采用螺旋桨推进,存在着结构复杂、体积 大,对环境扰动大,噪声大,推进效率低以及动作灵活性和隐蔽性差等缺点[5-8]。 而海洋中的水生生物经过漫长的自然进化,发展出了各具特色的游动方式和非 凡的游动能力,不仅能够以低能耗和高效率来实现长距离的巡游,而且还可在 快速游动中实现快速的机动响应,因此科研人员纷纷展开了对各种水下生物推 进机理以及相关仿生水下推进技术的研究,希望藉此能够研制出高效率、低噪 声以及高机动性的仿生水下机器人[9, 10]。 鱼类是海洋生物的主体,其推进模式主要分两类,一类是通过尾鳍摆动实 现推进的 BCF 推进模式,另一类则是通过长鳍波动来实现推进的 MPF 推进模 式[11-13]。其中 BCF 推进模式的优势是快速性和高效性,而 MPF 推进模式的优 势是机动性和稳定性[14]。目前,国内外研制的仿生机器鱼大多模拟鱼类的这两 种推进模式。墨鱼是一种奇特的海洋生物,它采用喷射的方式实现推进,即通 过其外套膜的快速收缩将腔内的水直接由喷嘴处向后迅速喷出,从而形成强劲 的推进力,墨鱼藉此获得了非凡的游动能力,其游动能力可与鱼类中的佼佼者 相媲美。因此,若能成功模拟墨鱼的喷射推进机制,将有望研制出一种可提供 强劲推进力的仿生喷射推进器,若将其应用于仿生机器鱼,将有望提升机器鱼 的游动速度和推进效率,同时也可为研制新型水下推进器提供新思路和新途 径。 目前,国内外研制的仿生机器鱼大多采用电机作为驱动,存在结构复杂、 体积大、动作有噪音,且难以模拟水生生物的柔性动作等缺点[6,7]。为解决上述 问题,科研人员开始研制智能材料驱动的仿生机器鱼。智能材料是一种集感知 和驱动为一体的新型功能材料,它们以良好的变形特性为人们提供了一种全新 的驱动方式[15, 16],也为仿生机器鱼的驱动设计提供了新途径。 万方数据
哈尔滨工业大学工学博士学位论文 目前,己被应用于仿生机器鱼设计的智能材料主要有离子交换聚合金属材 料(Ionic Polymer-Metal Composite,.IPMC)、压电陶瓷(Piezoelectric Ceramics, PZT)和形状记忆合金(Shape Memory Alloy,SMA)等三种I7,1)。其中,PZT需要 很大的驱动电压(一般为50-800V),并且变形量较小,仅为其自身尺寸的千分 之一8),往往需要另行设计机构对其应变进行放大,因而较少应用于仿生机器 鱼的设计。而IPMC虽然具有驱动电压低、响应快、能耗低的优点922,并且 在仿生机器鱼的设计中得到了广泛的应用,然而由于其驱动力较小,导致目前 研制的IMPC驱动的机器鱼的游动速度均较低,难以实用化。而SMA除了具 有驱动电压低、形变量大的优点之外,还具有输出力大和功重比高的优点,其 性能与鱼类肌肉纤维的性能最为接近2],因此与其它智能材料相比较,SMA 的综合性能更优,更适合应用于仿生机器鱼的驱动设计。 本章首先对智能材料驱动的仿生机器鱼的研究现状及CFD在水动力分析 中的应用进行了综述,然后归纳了目前仿生机器鱼研究中存在的问题,最后介 绍课题的来源、意义和主要研究内容。 1.2智能材料驱动的仿生机器鱼研究综述 智能材料能够在外部刺激的作用下直接输出变形和力,因而可用作驱动 器。由于其具有结构简单、体积小、动作柔性无声24,2]、甚至能直接模拟弯曲 摆动等优点而逐渐被科研人员应用于仿生机器鱼的设计中。这些智能材料主要 有离子交换聚合金属材料(IPMC)、压电陶瓷(PZT)和形状记忆合金(SMA)等。下 文将对智能材料驱动的仿生机器鱼的国内外研究现状进行介绍和分析。 1.2.1IPMC驱动的仿生机器鱼 IPMC是一种在外加电场的作用下能产生弯曲变形的离子型金属聚合物, 它是由在高分子离子交换树脂膜(Nafion膜)上下表面镀致密惰性金属(如Pt、 Au)层而制成[22]。其原理为当片状的IPMC两侧加上电压后,由于同性相斥、 异性相吸的原因,其内部体积较大的水合阳离子会向负极移动,使负极一侧体 积变大,而正极一侧体积变小,从而使PMC向正极弯曲26。当施加交变电压 时,IPMC可交替向两侧弯曲。IPMC的优点是驱动电压低、响应快、变形大和 效率高,因而在仿生设计上获得了较多的应用。 国内外最早研制IPMC驱动仿生机器鱼的是日本香川大学的Shuxiang Guo 等人,他们于1998年和2002年先后研制了两款IPMC驱动的微型机器鱼27,281。 两款微型机器鱼的尺寸仅为10mm,质量约为0.76g,均采用IPMC驱动的尾 -2- 万方数据
哈尔滨工业大学工学博士学位论文 - 2 - 目前,已被应用于仿生机器鱼设计的智能材料主要有离子交换聚合金属材 料(Ionic Polymer–Metal Composite, IPMC)、压电陶瓷(Piezoelectric Ceramics, PZT)和形状记忆合金(Shape Memory Alloy, SMA)等三种[7, 17]。其中,PZT 需要 很大的驱动电压(一般为 50-800 V),并且变形量较小,仅为其自身尺寸的千分 之一[18],往往需要另行设计机构对其应变进行放大,因而较少应用于仿生机器 鱼的设计。而 IPMC 虽然具有驱动电压低、响应快、能耗低的优点[19-22],并且 在仿生机器鱼的设计中得到了广泛的应用,然而由于其驱动力较小,导致目前 研制的 IMPC 驱动的机器鱼的游动速度均较低,难以实用化。而 SMA 除了具 有驱动电压低、形变量大的优点之外,还具有输出力大和功重比高的优点,其 性能与鱼类肌肉纤维的性能最为接近[23],因此与其它智能材料相比较,SMA 的综合性能更优,更适合应用于仿生机器鱼的驱动设计。 本章首先对智能材料驱动的仿生机器鱼的研究现状及 CFD 在水动力分析 中的应用进行了综述,然后归纳了目前仿生机器鱼研究中存在的问题,最后介 绍课题的来源、意义和主要研究内容。 1.2 智能材料驱动的仿生机器鱼研究综述 智能材料能够在外部刺激的作用下直接输出变形和力,因而可用作驱动 器。由于其具有结构简单、体积小、动作柔性无声[24, 25]、甚至能直接模拟弯曲 摆动等优点而逐渐被科研人员应用于仿生机器鱼的设计中。这些智能材料主要 有离子交换聚合金属材料(IPMC)、压电陶瓷(PZT)和形状记忆合金(SMA)等。下 文将对智能材料驱动的仿生机器鱼的国内外研究现状进行介绍和分析。 1.2.1 IPMC 驱动的仿生机器鱼 IPMC 是一种在外加电场的作用下能产生弯曲变形的离子型金属聚合物, 它是由在高分子离子交换树脂膜(Nafion 膜)上下表面镀致密惰性金属(如 Pt、 Au)层而制成[22]。其原理为当片状的 IPMC 两侧加上电压后,由于同性相斥、 异性相吸的原因,其内部体积较大的水合阳离子会向负极移动,使负极一侧体 积变大,而正极一侧体积变小,从而使 IPMC 向正极弯曲[26]。当施加交变电压 时,IPMC 可交替向两侧弯曲。IPMC 的优点是驱动电压低、响应快、变形大和 效率高[19],因而在仿生设计上获得了较多的应用。 国内外最早研制 IPMC 驱动仿生机器鱼的是日本香川大学的 Shuxiang Guo 等人,他们于 1998 年和 2002 年先后研制了两款 IPMC 驱动的微型机器鱼[27, 28]。 两款微型机器鱼的尺寸仅为 10 mm,质量约为 0.76 g,均采用 IPMC 驱动的尾 万方数据
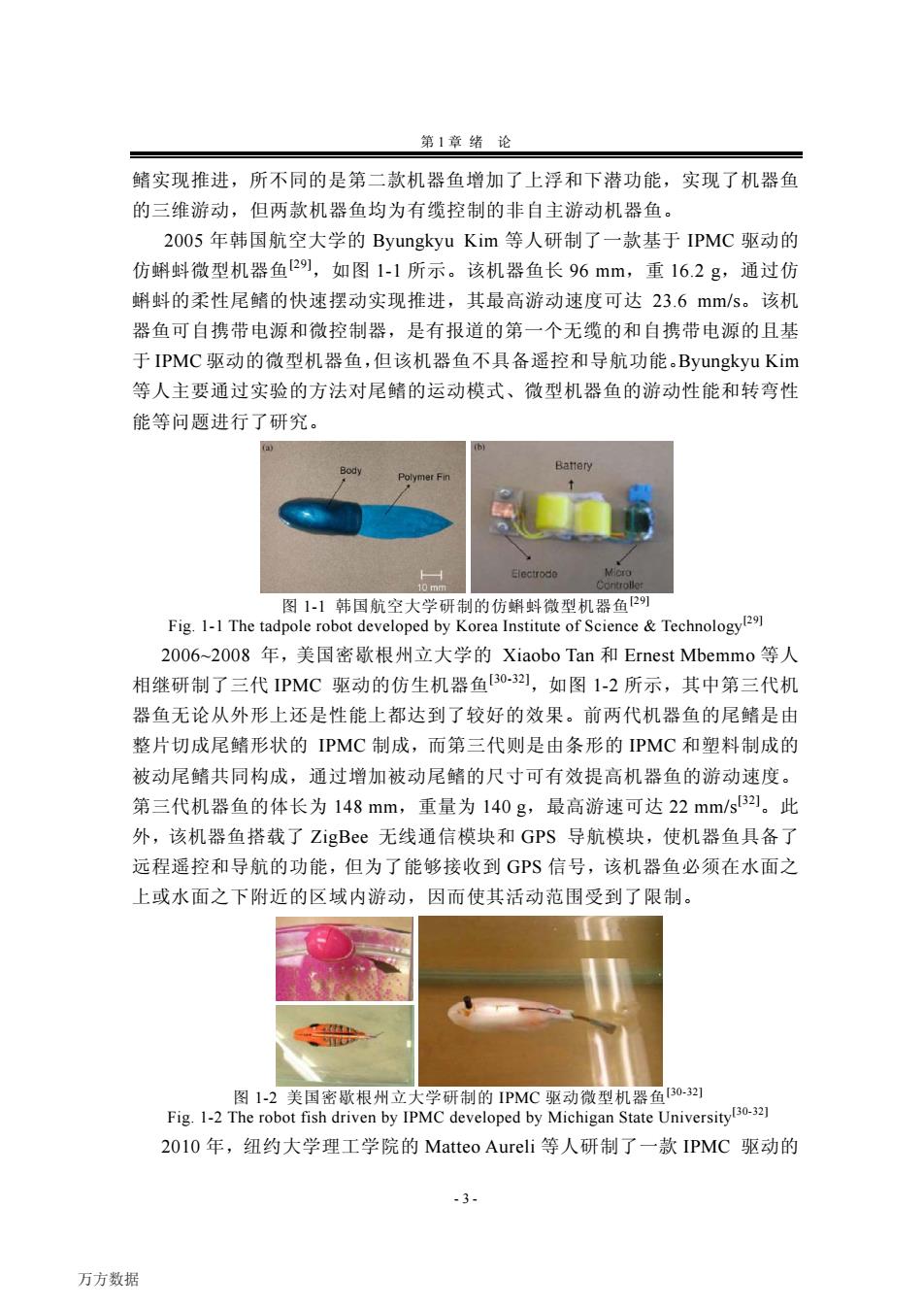
第1章绪论 鳍实现推进,所不同的是第二款机器鱼增加了上浮和下潜功能,实现了机器鱼 的三维游动,但两款机器鱼均为有缆控制的非自主游动机器鱼。 2005年韩国航空大学的Byungkyu Kim等人研制了一款基于IPMC驱动的 仿蝌蚪微型机器鱼[2叨,如图1-1所示。该机器鱼长96mm,重16.2g,通过仿 蝌蚪的柔性尾鳍的快速摆动实现推进,其最高游动速度可达23.6mm/s。该机 器鱼可自携带电源和微控制器,是有报道的第一个无缆的和自携带电源的且基 于IPMC驱动的微型机器鱼,但该机器鱼不具备遥控和导航功能.Byungkyu Kim 等人主要通过实验的方法对尾鳍的运动模式、微型机器鱼的游动性能和转弯性 能等问题进行了研究。 Battery ymer Fir Electrode Controller 图1-1韩国航空大学研制的仿蝌蚪微型机器鱼29) Fig.1-1 The tadpole robot developed by Korea Institute of Science Technology291 2006~2008年,美国密歇根州立大学的Xiaobo Tan和Ernest Mbemmo等人 相继研制了三代PMC驱动的仿生机器鱼30-32),如图1-2所示,其中第三代机 器鱼无论从外形上还是性能上都达到了较好的效果。前两代机器鱼的尾鳍是由 整片切成尾鳍形状的IPMC制成,而第三代则是由条形的IPMC和塑料制成的 被动尾鳍共同构成,通过增加被动尾鳍的尺寸可有效提高机器鱼的游动速度。 第三代机器鱼的体长为148mm,重量为140g,最高游速可达22mm/sB2。此 外,该机器鱼搭载了ZigBee无线通信模块和GPS导航模块,使机器鱼具备了 远程遥控和导航的功能,但为了能够接收到GPS信号,该机器鱼必须在水面之 上或水面之下附近的区域内游动,因而使其活动范围受到了限制。 图1-2美国密歇根州立大学研制的IPMC驱动微型机器鱼[30-32] Fig.1-2 The robot fish driven by IPMC developed by Michigan State Universityl30-321 2010年,纽约大学理工学院的Matteo Aureli等人研制了一款IPMC驱动的 -3- 万方数据
第 1 章 绪 论 - 3 - 鳍实现推进,所不同的是第二款机器鱼增加了上浮和下潜功能,实现了机器鱼 的三维游动,但两款机器鱼均为有缆控制的非自主游动机器鱼。 2005 年韩国航空大学的 Byungkyu Kim 等人研制了一款基于 IPMC 驱动的 仿蝌蚪微型机器鱼[29],如图 1-1 所示。该机器鱼长 96 mm,重 16.2 g,通过仿 蝌蚪的柔性尾鳍的快速摆动实现推进,其最高游动速度可达 23.6 mm/s。该机 器鱼可自携带电源和微控制器,是有报道的第一个无缆的和自携带电源的且基 于 IPMC 驱动的微型机器鱼,但该机器鱼不具备遥控和导航功能。Byungkyu Kim 等人主要通过实验的方法对尾鳍的运动模式、微型机器鱼的游动性能和转弯性 能等问题进行了研究。 图 1-1 韩国航空大学研制的仿蝌蚪微型机器鱼[29] Fig. 1-1 The tadpole robot developed by Korea Institute of Science & Technology[29] 2006~2008 年,美国密歇根州立大学的 Xiaobo Tan 和 Ernest Mbemmo 等人 相继研制了三代 IPMC 驱动的仿生机器鱼[30-32],如图 1-2 所示,其中第三代机 器鱼无论从外形上还是性能上都达到了较好的效果。前两代机器鱼的尾鳍是由 整片切成尾鳍形状的 IPMC 制成,而第三代则是由条形的 IPMC 和塑料制成的 被动尾鳍共同构成,通过增加被动尾鳍的尺寸可有效提高机器鱼的游动速度。 第三代机器鱼的体长为 148 mm,重量为 140 g,最高游速可达 22 mm/s[32]。此 外,该机器鱼搭载了 ZigBee 无线通信模块和 GPS 导航模块,使机器鱼具备了 远程遥控和导航的功能,但为了能够接收到 GPS 信号,该机器鱼必须在水面之 上或水面之下附近的区域内游动,因而使其活动范围受到了限制。 图 1-2 美国密歇根州立大学研制的 IPMC 驱动微型机器鱼[30-32] Fig. 1-2 The robot fish driven by IPMC developed by Michigan State University[30-32] 2010 年,纽约大学理工学院的 Matteo Aureli 等人研制了一款 IPMC 驱动的 万方数据