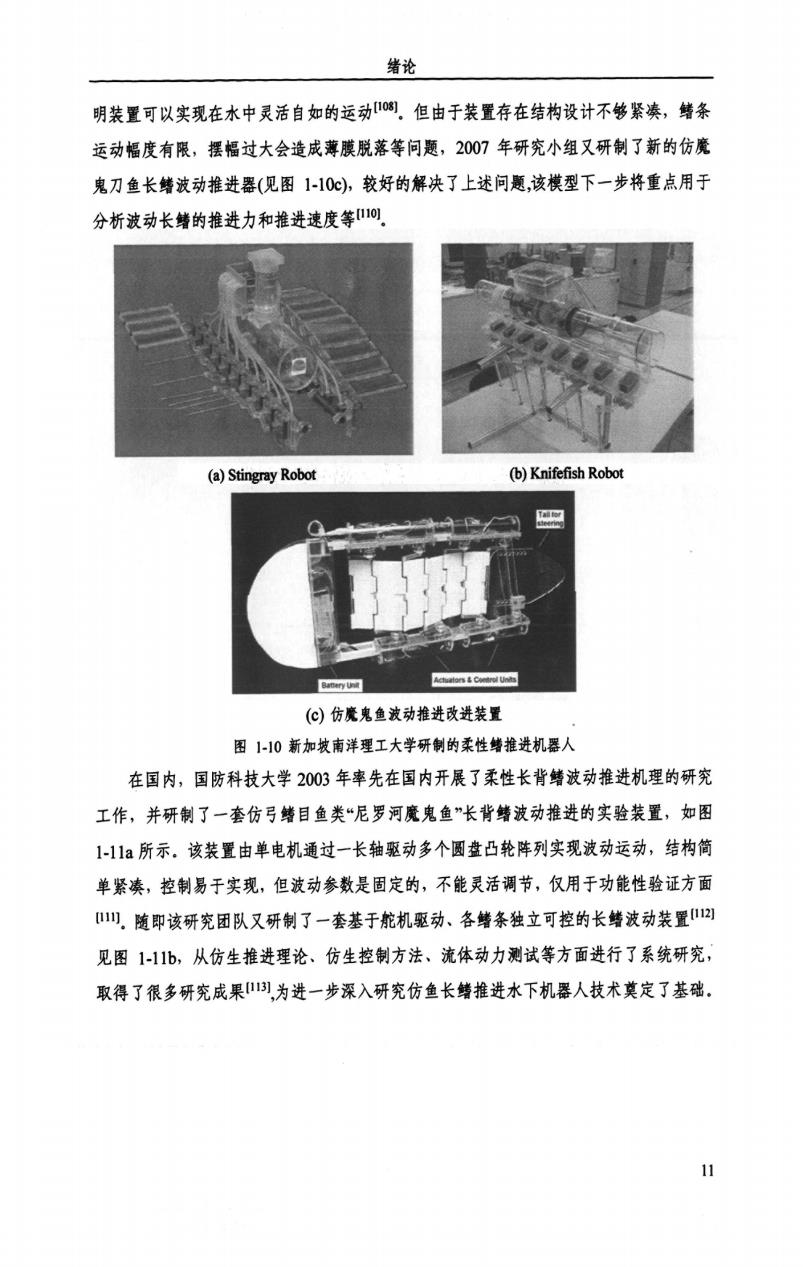
绪论 明装置可以实现在水中灵活自如的运动阁.但由于装置存在结构设计不够紧凑,鳍条 运动幅度有限,摆幅过大会造成薄膜脱落等问题,2007年研究小组又研制了新的仿魔 鬼刀鱼长鳍波动推进器(见图1-10c),较好的解决了上述问题,该模型下一步将重点用于 分析波动长鳍的推进力和推进速度等10 (a)Stingray Robot (b)Knifefish Robot n回 AchualorsCoerol Unts (心)仿魔鬼鱼波动推进改进装置 图1-10新加坡南洋理工大学研制的柔性鳍推进机器人 在国内,国防科技大学2003年率先在国内开展了柔性长背鳍波动推进机理的研究 工作,并研制了一套仿弓鳍目鱼类“尼罗河魔鬼鱼”长背鳍波动推进的实验装置,如图 1-11a所示。该装置由单电机通过一长轴驱动多个圆盘凸轮阵列实现波动运动,结构简 单紧凑,控制易于实现,但波动参数是固定的,不能灵活调节,仅用于功能性验证方面 山.随即该研究团队又研制了一套基于舵机驱动、各鳍条独立可控的长鳍波动装置2] 见图1-11b,从仿生推进理论、仿生控制方法、流体动力测试等方面进行了系统研究, 取得了很多研究成果),为进一步深入研究仿鱼长鳍推进水下机器人技术莫定了基础. 11
绪论 明装置可以实现在水中灵活自如的运动【1吣】。但由于装置存在结构设计不够紧凑,鳍条 运动幅度有限,摆幅过大会造成薄膜脱落等问题,2007年研究小组又研制了新的仿魔 鬼刀鱼长鳍波动推进器(见图1.10c),较好的解决了上述问题,该模型下一步将重点用于 分析波动长鳍的推进力和推进速度等【11们。 (b)酬筋shR曲0t (c)仿魔鬼鱼波动推进改进装置 . 图1.10新加坡南洋理工大学研制的柔性鳍推进机器人 在国内,国防科技大学2003年率先在国内开展了柔性长背鳍波动推进机理的研究 工作,并研制了一套仿弓鳍目鱼类“尼罗河魔鬼鱼”长背鳍波动推进的实验装置,如图 1.11a所示。该装置由单电机通过一长轴驱动多个圆盘凸轮阵列实现波动运动,结构简 单紧凑,控制易于实现,但波动参数是固定的,不能灵活调节,仅用于功能性验证方面 【llll。随即该研究团队又研制了一套基于舵机驱动、各鳍条独立可控的长鳍波动装置【¨2】 见图1.11b,从仿生推进理论、仿生控制方法、流体动力测试等方面进行了系统研究, 取得了很多研究成果【¨31,为进一步深入研究仿鱼长鳍推进水下机器人技术奠定了基础.
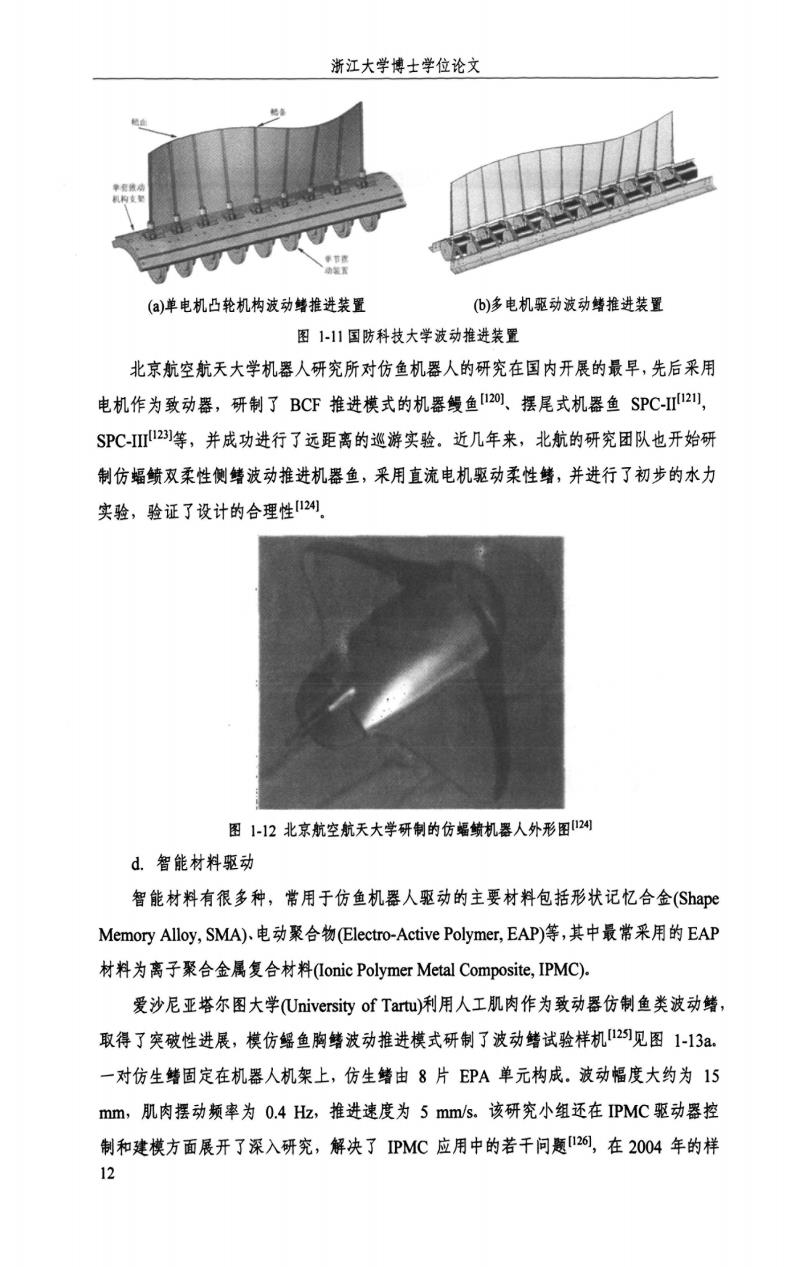
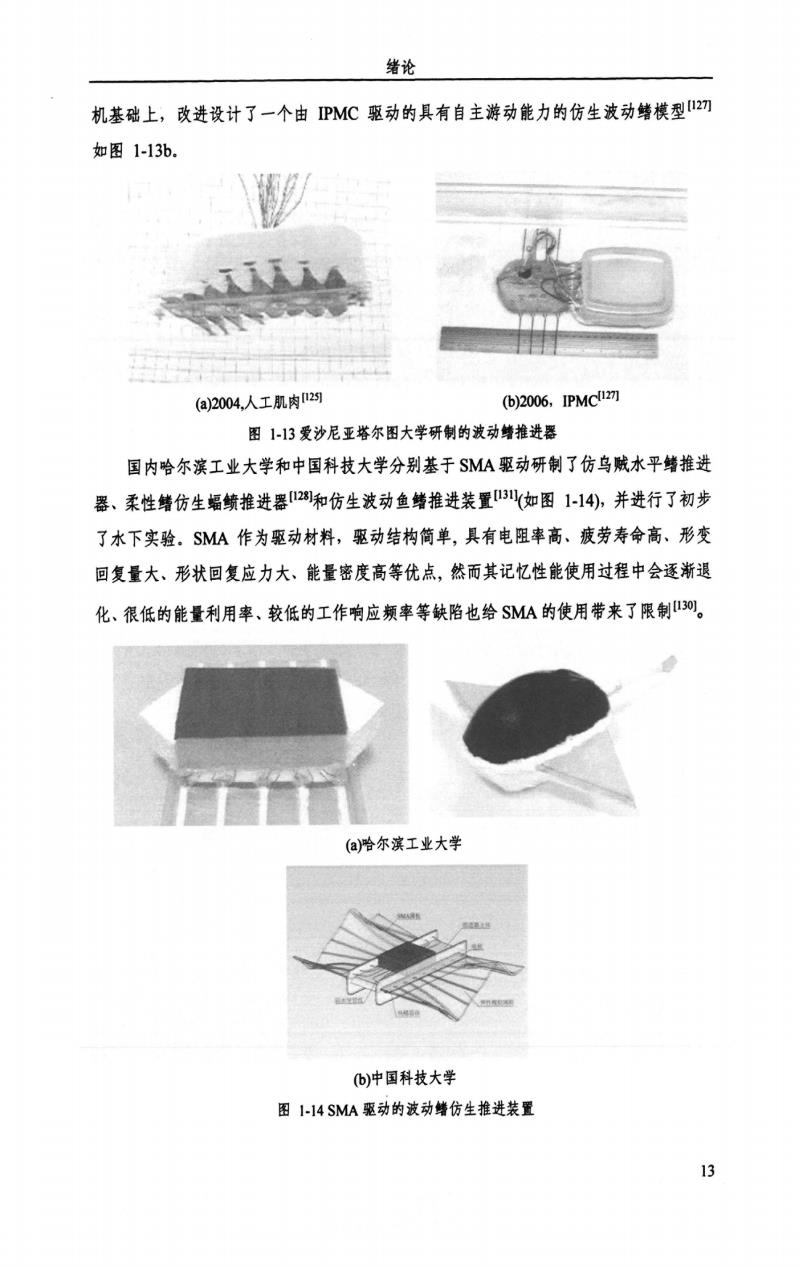
浙江大学博士学位论文 手节应 动装置 (a)单电机凸轮机构波动鳍推进装置 (b)多电机驱动波动鳍推进装置 图1-11国防科技大学波动推进装置 北京航空航天大学机器人研究所对仿鱼机器人的研究在国内开展的最早,先后采用 电机作为致动器,研制了BCF推进模式的机器鳗鱼20)、摆尾式机器鱼SPC-2, SPC等,并成功进行了远距离的巡游实验。近几年来,北航的研究团队也开始研 制仿蝠鲼双柔性侧鳍波动推进机器鱼,采用直流电机驱动柔性鳍,并进行了初步的水力 实验,验证了设计的合理性24 图1-12北京航空航天大学研制的仿蝠鲼机器人外形图2调 d.智能材料驱动 智能材料有很多种,常用于仿鱼机器人驱动的主要材料包括形状记忆合金(Shape Memory Alloy,SMA),电动聚合物(Electro-.Active Polymer,,EAP)等,其中最常采用的EAP 材料为离子聚合金属复合材料Ionic Polymer Metal Composite,IPMC), 爱沙尼亚塔尔图大学(University of Tartu)利用人工肌肉作为致动器仿制鱼类波动鳍, 取得了突破性进展,模仿鳐鱼胸鳍波动推进模式研制了波动鳍试验样机2见图1-13. 一对仿生鳍固定在机器人机架上,仿生鳍由8片EPA单元构成。波动幅度大约为15 mm,肌肉摆动频率为0.4Hz,推进速度为5mm/s.该研究小组还在IPMC驱动器控 制和建模方面展开了深入研究,解决了IPMC应用中的若千问题12阿,在2004年的样 白
浙江大学博士学位论文 (a)单电机凸轮机构波动鳍推进装置 (b)多电机驱动波动鳍推进装置 图1.11国防科技大学波动推进装置 北京航空航天大学机器人研究所对仿鱼机器人的研究在国内开展的最早,先后采用 电机作为致动器,研制了BCF推进模式的机器鳗鱼【1201、摆尾式机器鱼SPC.II【121】, SPC.III【123】等,并成功进行了远距离的巡游实验。近几年来,北航的研究团队也开始研 制仿蝠鲼双柔性侧鳍波动推进机器鱼,采用直流电机驱动柔性鳍,并进行了初步的水力 实验,验证了设计的合理性【1 241。 图1.12北京航空航天大学研制的仿蝠鲼机器人外形图【124】 d.智能材料驱动 智能材料有很多种,常用于仿鱼机器人驱动的主要材料包括形状记忆合金(shape Menlo巧Alloy,SMA)、电动聚合物(Electr0-A砸Ve Polymer,EAP)等,其中最常采用的EAP 材料为离子聚合金属复合材料(Iollic Polyn埘M削Composite,IPMC)。 爱沙尼亚塔尔图大学∞I曲ers时of№刑用人工肌肉作为致动器仿制鱼类波动鳍, 取得了突破性进展,模仿鳐鱼胸鳍波动推进模式研制了波动鳍试验样机【1251见图1.13a。 一对仿生鳍固定在机器人机架上,仿生鳍由8片EPA单元构成。波动幅度大约为15 姗,肌肉摆动频率为0.4 Hz,推进速度为5舢刚s。该研究小组还在IPMC驱动器控 制和建模方面展开了深入研究,解决了IPMC应用中的若干问题【126】,在2004年的样 1 2
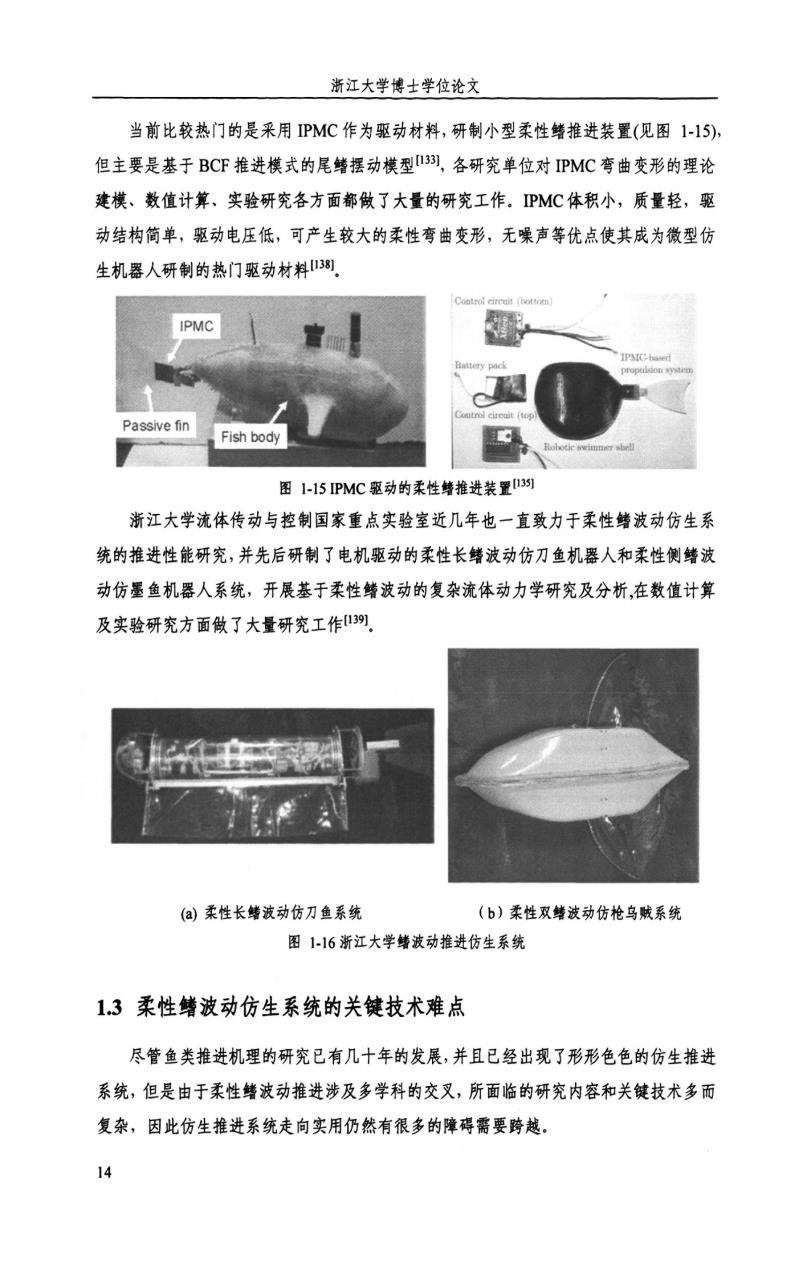
绪论 机基础上,改进设计了一个由PMC驱动的具有自主游动能力的仿生波动鳍模型2可 如图1-13b. (a2004,人工肌肉2均 (b)2006,IPMC127 图1-13爱沙尼亚塔尔图大学研制的波动蜂推进器 国内哈尔滨工业大学和中国科技大学分别基于SMA驱动研制了仿乌贼水平鳍推进 器、柔性鳍仿生蝠鲼推进器2和仿生波动鱼鳍推进装置3如图1-14),并进行了初步 了水下实验。SMA作为驱动材料,驱动结构简单,具有电阻率高、疲劳寿命高、形变 回复量大、形状回复应力大、能量密度高等优点,然而其记忆性能使用过程中会逐渐退 化、很低的能量利用率、较低的工作响应频率等缺陷也给SMA的使用带来了限制30。 (a哈尔滨工业大学 (6)中国科技大学 图1-I4SMA驱动的波动鳍仿生推进装置 13
绪论 机基础上,改进设计了一个由IPMC驱动的具有自主游动能力的仿生波动鳍模型【127】 如图1.13b。 ■。 ≯,j : 占 ㈨2004,人工肌肉【1251 (b)2006,IPMCll271 图1.13爱沙尼亚塔尔图大学研制的波动鳍推进器 国内哈尔滨工业大学和中国科技大学分别基于SMA驱动研制了仿乌贼水平鳍推进 器、柔性鳍仿生蝠鲼推进器【1281和仿生波动鱼鳍推进装置f1311(如图1.14),并进行了初步 了水下实验。SMA作为驱动材料,驱动结构简单,具有电阻率高、疲劳寿命高、形交 回复量大、形状回复应力大、能量密度高等优点,然而其记忆性能使用过程中会逐渐退 化、很低的能量利用率、较低的工作响应频率等缺陷也给SMA的使用带来了限制11301。 (a)哈尔滨工业大学 (b)中国科技大学 图1.14 SMA驱动的波动鳍仿生推进装置 13
浙江大学博士学位论文 当前比较热门的是采用PMC作为驱动材料,研制小型柔性鳍推进装置(见图1-15), 但主要是基于BCP推进模式的尾鳍摆动模型3),各研究单位对IPMC弯曲变形的理论 建模、数值计算、实验研究各方面都做了大量的研究工作。PMC体积小,质量轻,驱 动结构简单,驱动电压低,可产生较大的柔性弯曲变形,无噪声等优点使其成为微型仿 生机器人研制的热门驱动材料3别, Cootrol cireuit (hottot) IPMC IP3IC-boed Passive fin Fish body 图1-15PMC驱动的柔性螃推进装置3阿] 浙江大学流体传动与控制国家重点实验室近几年也一直致力于柔性鳍波动仿生系 统的推进性能研究,并先后研制了电机驱动的柔性长鳍波动仿刀鱼机器人和柔性侧鳍波 动仿墨鱼机器人系统,开展基于柔性鳍波动的复杂流体动力学研究及分析,在数值计算 及实验研究方面做了大量研究工作3, (a)柔性长鳍波动仿刀鱼系统 (b)柔性双鳍波动仿枪乌贼系统 图116浙江大学鳍波动推进仿生系统 1.3柔性鳍波动仿生系统的关鍵技术难点 尽管鱼类推进机理的研究已有几十年的发展,并且已经出现了形形色色的仿生推进 系统,但是由于柔性鳍波动推进涉及多学科的交叉,所面临的研究内容和关键技术多而 复杂,因此仿生推进系统走向实用仍然有很多的障碍需要跨越。 14
浙江大学博士学位论文 当前比较热门的是采用IPMc作为驱动材料,研制小型柔性鳍推进装置(见图1.15), 但主要是基于BCF推进模式的尾鳍摆动模型‘13”,各研究单位对IPMC弯曲变形的理论 建模、数值计算、实验研究各方面都做了大量的研究工作。IPMc体积小,质量轻,驱 动结构简单,驱动电压低,可产生较大的柔性弯曲变形,无噪声等优点使其成为微型仿 生机器人研制的热门驱动材料【1381。 图1.15 lPMc驱动的柔性鳍推进装置【1351 浙江大学流体传动与控制国家重点实验室近几年也一直致力于柔性鳍波动仿生系 统的推进性能研究,并先后研制了电机驱动的柔性长鳍波动仿刀鱼机器人和柔性侧鳍波 动仿墨鱼机器人系统,开展基于柔性鳍波动的复杂流体动力学研究及分析,在数值计算 及实验研究方面做了大量研究工作【1391。 (a)柔性长鳍波动仿刀鱼系统 (b)柔性双鳍波动仿枪乌贼系统 图1.16浙江大学鳍波动推进仿生系统 1.3柔性鳍波动仿生系统的关键技术难点 尽管鱼类推进机理的研究已有几十年的发展,并且已经出现了形形色色的仿生推进 系统,但是由于柔性鳍波动推进涉及多学科的交叉,所面临的研究内容和关键技术多而 复杂,因此仿生推进系统走向实用仍然有很多的障碍需要跨越。 14 攀叠警叠
绪论 本课题所研究的柔性长鳍波动推进系统和柔性双鳍波动推进系统,重点需要解决的 关键技术难点包括以下几个方面: (1)流固耦合系统动力学模型的建立 动态流固耦合技术涉及复杂的机器人动力学、流体力学耦合问题,这已经超出两个 学科传统理论涉及的范围,一直是流体动力学专家及相关工程研究专家都亟需解决 的问题。柔性鳍波动过程中与周围流体间的相互耦合,形成了三维空间、一维时间 的四维非定常特性46,动力学问题的复杂性可想而知。正确分析柔性鳍波动的动力 学问题,建立正确的动力学模型,是更好的控制柔性鳍的波动运动,提高推进性能 的必要前提,也是柔性鳍波动推进仿生系统研究中亟待解决的难题。因此在现阶段 如何将复杂的流固耦合问题进行简化,建立适合本课题推进系统的水动力模型,并 是本课题研究的一大难点。 (②)动力学模型的数值求解方法 柔性鳍波动推进系统动力学模型是复杂的非线性偏微分方程组形式,很难用解析的 手段进行求解,如何构建本课题所研究的柔性长鳍及柔性双鳍波动推进数值模型, 选择有效的数值计算方法,确定流体固体动态边界条件,实现三维非定常流场及流 固耦合场的数值计算,正确揭示柔性鳍波动推进的流场变化特征及推进性能的变化 规律,是本课题研究的重点及难点。 (③)柔性鳍波动致动器及推进系统的柔性仿生设计及实现 传统的电机、液压、气动驱动方式必然导致推进装置结构复杂,波动动作柔性差, 常用智能材料(SMA,IPMC等)工作原理与动物肌肉相似,可大大简化推进结构, 提高动作的柔性,控制简单,噪声低,作为致动器用于微型推进器中有很大的应用 空间州,但普遍存在控制频率较低,驱动力较小的问题,应用前景受到很大限制. 如何在现有驱动方式下,提高波动推进装置动作的柔性设计,又能满足功能仿生及 形态仿生的要求,使得推进装置的波动动作更加逼近鱼类的波动游动,是整个仿生 设计中的关键难题。本课题采用传统的电机驱动方式,将探索两种新型柔性鳍波动 推进方式,如何设计柔性鳍的致动机构,实现柔性鳍波动推进功能,以及如何完成 整个推进系统的仿生设计,使推进机构在仿生基础上最大可能的结构简单,轻便, 操作和装配灵活,推进性能良好,是本课题需要解决的关键问题。 (4)水下动力技术、通讯技术、动密封技术 这些技术是很多水下机器人面临解决的共同难题,对于柔性鳍波动仿生推进系统也 15
绪论 本课题所研究的柔性长鳍波动推进系统和柔性双鳍波动推进系统,重点需要解决的 关键技术难点包括以下几个方面: (1)流固耦合系统动力学模型的建立 动态流固耦合技术涉及复杂的机器人动力学、流体力学耦合问题,这已经超出两个 学科传统理论涉及的范围,一直是流体动力学专家及相关工程研究专家都亟需解决 的问题。柔性鳍波动过程中与周围流体间的相互耦合,形成了三维空间、一维时间 的四维非定常特性‘146】,动力学问题的复杂性可想而知。正确分析柔性鳍波动的动力 学问题,建立正确的动力学模型,是更好的控制柔性鳍的波动运动,提高推进性能 的必要前提,也是柔性鳍波动推进仿生系统研究中亟待解决的难题。因此在现阶段 如何将复杂的流固耦合问题进行简化,建立适合本课题推进系统的水动力模型,并 是本课题研究的一大难点。 (2)动力学模型的数值求解方法 柔性鳍波动推进系统动力学模型是复杂的非线性偏微分方程组形式,很难用解析的 手段进行求解,如何构建本课题所研究的柔性长鳍及柔性双鳍波动推进数值模型, 选择有效的数值计算方法,确定流体.固体动态边界条件,实现三维非定常流场及流 固耦合场的数值计算,正确揭示柔性鳍波动推进的流场变化特征及推进性能的变化 规律,是本课题研究的重点及难点。 (3)柔性鳍波动致动器及推进系统的柔性仿生设计及实现 传统的电机、液压、气动驱动方式必然导致推进装置结构复杂,波动动作柔性差, 常用智能材料(SMA,IPMC等)工作原理与动物肌肉相似,可大大简化推进结构, 提高动作的柔性,控制简单,噪声低,作为致动器用于微型推进器中有很大的应用 空间【144】,但普遍存在控制频率较低,驱动力较小的问题,应用前景受到很大限制。 如何在现有驱动方式下,提高波动推进装置动作的柔性设计,又能满足功能仿生及 形态仿生的要求,使得推进装置的波动动作更加逼近鱼类的波动游动,是整个仿生 设计中的关键难题。本课题采用传统的电机驱动方式,将探索两种新型柔性鳍波动 推进方式,如何设计柔性鳍的致动机构,实现柔性鳍波动推进功能,以及如何完成 整个推进系统的仿生设计,使推进机构在仿生基础上最大可能的结构简单,轻便, 操作和装配灵活,推进性能良好,是本课题需要解决的关键问题。 (4)水下动力技术、通讯技术、动密封技术 这些技术是很多水下机器人面临解决的共同难题,对于柔性鳍波动仿生推进系统也 15