浙江大学博士学位论文 算法新的突破 中国科学技术大学针对仿生对象“蓝点虹”波动胸鳍开展了大量的数值研究工作,对 仿生鳍条摆动过程和鱼鳍波动过程进行数值计算(见图146),综合分析运动学参数、波 动模式、波动鳍鳍面形状和鳍条倾角对游动性能的影响.分析鱼鳍波动游动时流场信息 以及受力情况,显示反卡门涡街的形成、发展、脱落及耗散过程,并从涡动力学角度揭 示推力产生的流体力学机理刚。 国防科技大学采用Fluent的动网格技术,开展了长鳍波动(背鳍/臀鳍/背腹鳍)推进 鱼类刀鱼在形态学、运动学和水动力学方面的研究,如图1-4,并结合工程设计的需 求进行了验证性和探索性的CFD分析工作6) 03-02-0100.1020.3 wy (a)西北大学 (⑥)中国科学技术大学 (c)帼防科技大学 图1-4柔性鳍波动数值研究概况 1.2.3实验研究概况 实验研究一方面可以验证理论推导和数值计算结果,另一方面也为进一步研制仿鱼 机器人提供可靠性数据,实验研究主要包括生理学、运动学和动力学方面的实验, 在生理学实验研究方面,相关学者从未停止对各种推进模式的鱼类展开大量的相关 研究67,柔性鳍波动推进的鱼类也不乏很多学者的兴趣,有很多相关文献。如 Rosenberger对鳐科模式黄貂鱼进行了一系列的实验研究四,利用肌电图 (Electromyography,EMG)技术获取黄貂鱼的形态学、运动学参数等(图1-5a,分析不同 的形态参数对运动形式的影响等;MacIver对裸背曼模式刀鱼开展了大量的实验研究工 作,揭示了刀鱼在恶劣复杂的水生环境生存,使用自身电感器官通过近距离电场感知环 境,同时具有非同寻常的带状长鳍推进系统,可以提供低速下多方向的高度机动性以, Anderson等分析墨鱼侧鳍的肌肉组织结构,鳍是一个体积不变的三维肌肉组织(图l-5b), 本质上是不可压缩的,所以一个方向上的肌肉收缩,其它方向上的肌肉就会拉长,这样 通过肌肉收缩、拉长实现鳍的弯曲。无论墨鱼在慢速还是在快速运动时,乌贼的鳍始终 都是处于波动状态,没有摆动状态出现阿, 在运动学实验研究方面,几乎所有与鱼游动有关的实验都涉及到运动学参数的测量, 6
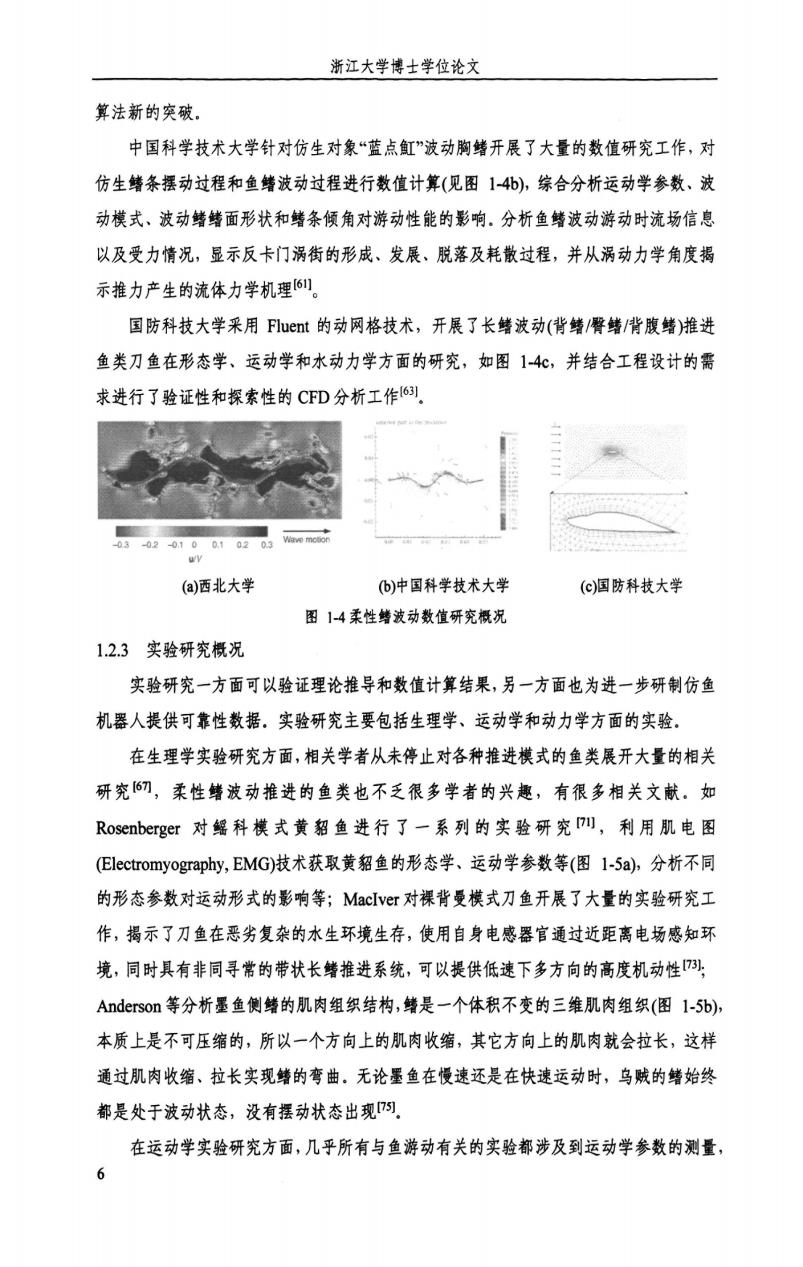
浙江大学博士学位论文 算法新的突破。 中国科学技术大学针对仿生对象“蓝点缸”波动胸鳍开展了大量的数值研究工作,对 仿生鳍条摆动过程和鱼鳍波动过程进行数值计算(见图1舶),综合分析运动学参数、波 动模式、波动鳍鳍面形状和鳍条倾角对游动性能的影响。分析鱼鳍波动游动时流场信息 以及受力情况,显示反卡门涡街的形成、发展、脱落及耗散过程,并从涡动力学角度揭 示推力产生的流体力学机理【611。 国防科技大学采用Fluent的动网格技术,开展了长鳍波动(背鳍/臀鳍/背腹鳍滩进 鱼类刀鱼在形态学、运动学和水动力学方面的研究,如图1-4c,并结合工程设计的需 求进行了验证性和探索性的CFD分析工作…。 I—黪 彤3 ∞2 ,?溺———隧豹一==, -01 O 0- 0 2 03 批坩哺{m “{7 (a)西北大学 (b)中国科学技术大学 (c)国防科技大学 图1-4柔性鳍波动数值研究概况 1.2.3实验研究概况 实验研究一方面可以验证理论推导和数值计算结果,另一方面也为进一步研制仿鱼 机器人提供可靠性数据.实验研究主要包括生理学、运动学和动力学方面的实验。 在生理学实验研究方面,相关学者从未停止对各种推进模式的鱼类展开大量的相关 研究【671,柔性鳍波动推进的鱼类也不乏很多学者的兴趣,有很多相关文献。如 Ro辩I慨rger对鳐科模式黄貂鱼进行了一系列的实验研究【711,利用肌电图 (Elec们1nyo伊aphy,EMG)技术获取黄貂鱼的形态学、运动学参数等(图1.5a),分析不同 的形态参数对运动形式的影响等;MaCIver对裸背曼模式刀鱼开展了大量的实验研究工 作,揭示了刀鱼在恶劣复杂的水生环境生存,使用自身电感器官通过近距离电场感知环 境,同时具有非同寻常的带状长鳍推进系统,可以提供低速下多方向的高度机动性【731; AnderSon等分析墨鱼侧鳍的肌肉组织结构,鳍是一个体积不变的三维肌肉组织(图1.5b), 本质上是不可压缩的,所以一个方向上的肌肉收缩,其它方向上的肌肉就会拉长,这样 通过肌肉收缩、拉长实现鳍的弯曲。无论墨鱼在慢速还是在快速运动时,乌贼的鳍始终 都是处于波动状态,没有摆动状态出现【751。 在运动学实验研究方面,几乎所有与鱼游动有关的实验都涉及到运动学参数的测量, 6
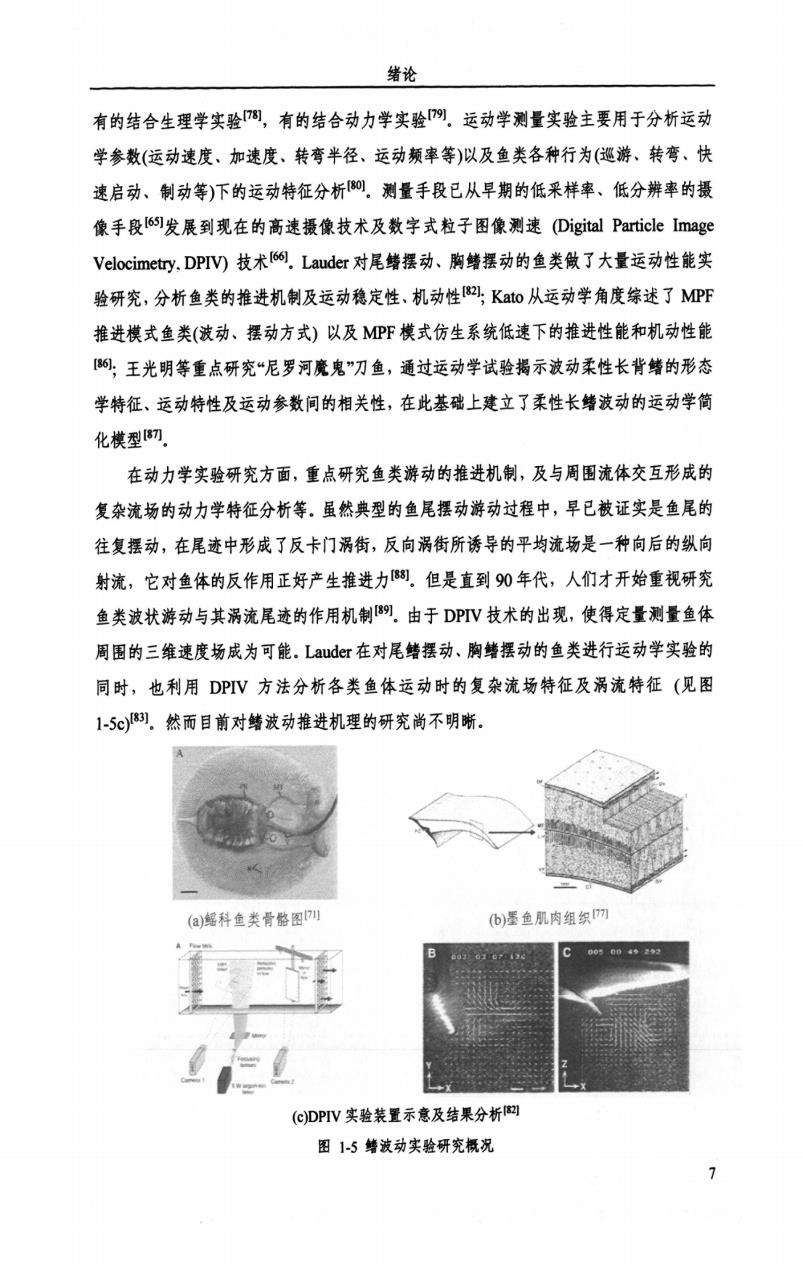
绪论 有的结合生理学实验7阁,有的结合动力学实验阿。运动学测量实验主要用于分析运动 学参数(运动速度、加速度、转弯半径、运动频率等)以及鱼类各种行为(巡游、转弯、快 速启动、制动等)下的运动特征分析侧.测量手段已从早期的低采样率、低分辨率的摄 像手段Is发展到现在的高速摄像技术及数字式粒子图像测速(Digital Particle Image Velocimetry,DPIV技术I6的.Lauder对尾鳍摆动、胸鳍摆动的鱼类做了大量运动性能实 验研究,分析鱼类的推进机制及运动稳定性、机动性Kato从运动学角度综述了MPF 推进模式鱼类(波动、摆动方式)以及MP℉模式仿生系统低速下的推进性能和机动性能 [阿,王光明等重点研究“尼罗河魔鬼”刀鱼,通过运动学试验揭示波动柔性长背鳍的形态 学特征、运动特性及运动参数间的相关性,在此基础上建立了柔性长鳍波动的运动学简 化模型可, 在动力学实验研究方面,重点研究鱼类游动的推进机制,及与周围流体交互形成的 复杂流场的动力学特征分析等。虽然典型的鱼尾摆动游动过程中,早已被证实是鱼尾的 往复摆动,在尾迹中形成了反卡门涡街,反向涡街所诱导的平均流场是一种向后的纵向 射流,它对鱼体的反作用正好产生推进力[.但是直到90年代,人们才开始重视研究 鱼类波状游动与其涡流尾迹的作用机制例.由于DPIV技术的出现,使得定量测量鱼体 周围的三维速度场成为可能。Lauder在对尾鳍摆动、胸鳍摆动的鱼类进行运动学实验的 同时,也利用DPIV方法分析各类鱼体运动时的复杂流场特征及涡流特征(见图 1-5沁)).然而目前对鳍波动推进机理的研究尚不明晰. (a)科鱼类骨酪图叫 (b)墨鱼肌肉组织77 C0050p4◆292 (C)DPIV实验装置示意及结果分析网 图1-5鳍波动实验研究概况 7
绪论 有的结合生理学实验p引,有的结合动力学实验p9】。运动学测量实验主要用于分析运动 学参数(运动速度、加速度、转弯半径、运动频率等)以及鱼类各种行为(巡游、转弯、快 速启动、制动等)下的运动特征分析【砌。测量手段已从早期的低采样率、低分辨率的摄 像手段【65】发展到现在的高速摄像技术及数字式粒子图像测速(Dig砌Pa而cle Image velocin:let巧.DPIV)技术脚】.I,al羽er对尾鳍摆动、胸鳍摆动的鱼类做了大量运动性能实 验研究,分析鱼类的推进机制及运动稳定性、机动性【821;klt0从运动学角度综述了MPF 推进模式鱼类(波动、摆动方式)以及MPF模式仿生系统低速下的推进性能和机动性能 【蚓;王光明等重点研究“尼罗河魔鬼”刀鱼,通过运动学试验揭示波动柔性长背鳍的形态 学特征、运动特性及运动参数问的相关性,在此基础上建立了柔性长鳍波动的运动学简 化模型璐7】。 在动力学实验研究方面,重点研究鱼类游动的推进机制,及与周围流体交互形成的 复杂流场的动力学特征分析等。虽然典型的鱼尾摆动游动过程中,早已被证实是鱼尾的 往复摆动,在尾迹中形成了反卡门涡街,反向涡街所诱导的平均流场是一种向后的纵向 射流,它对鱼体的反作用正好产生推进力183】。但是直到90年代,人们才开始重视研究 鱼类波状游动与其涡流尾迹的作用机制1391。由于DPⅣ技术的出现,使得定量测量鱼体 周围的三维速度场成为可能。L础在对尾鳍摆动、胸鳍摆动的鱼类进行运动学实验的 同时,也利用DPIV方法分析各类鱼体运动时的复杂流场特征及涡流特征(见图 1.5∞【831。然而目前对鳍波动推进机理的研究尚不明晰。 矗 一 毒:-一j:一: 寻-一_。:鬻糕懿. 7h■。。…t≯鬻弱戤!籀t≥名: “{:I|≤;。k;:一tt’茂_≮鞠毛矽∥ _舅 (c)DPIV实验装置示意及结果分析132l 图1.5鳍波动实验研究概况 7
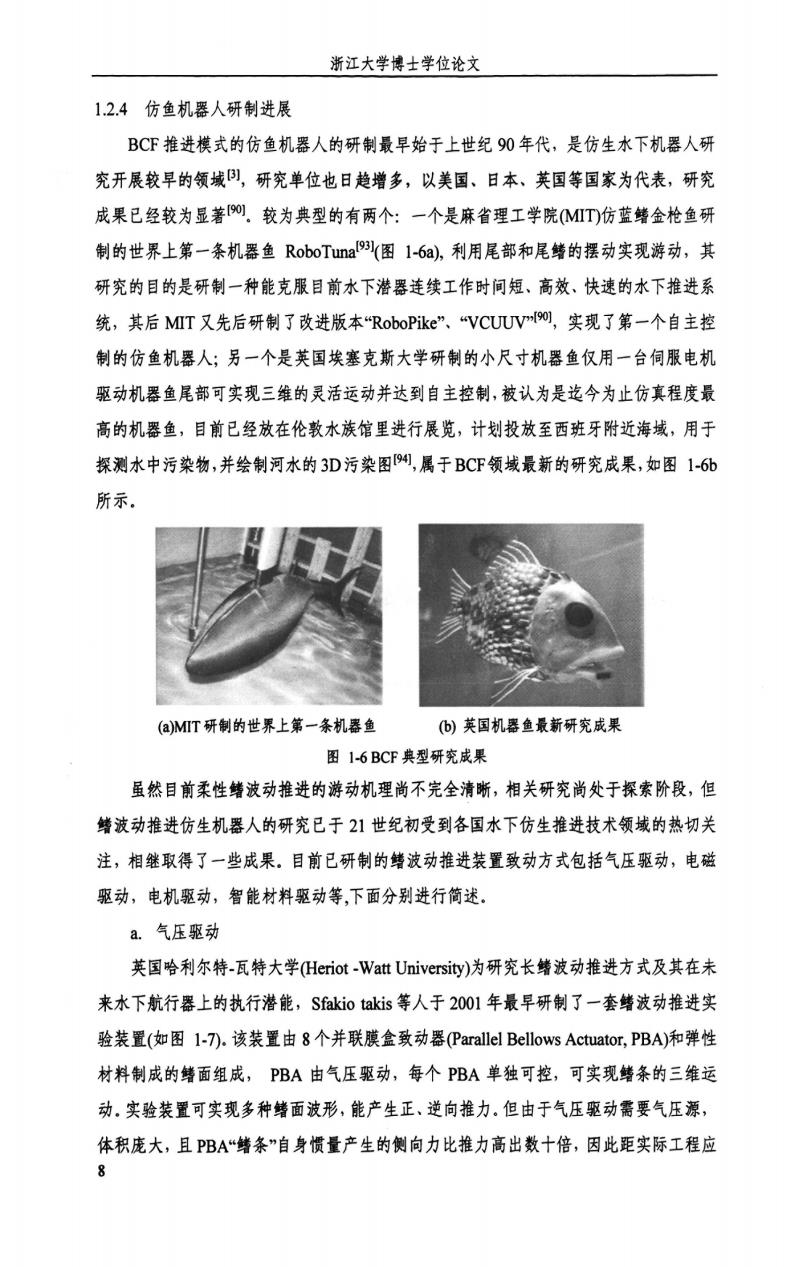
浙江大学博士学位论文 1.2.4仿鱼机器人研制进展 BC℉推进模式的仿鱼机器人的研制最早始于上世纪90年代,是仿生水下机器人研 究开展较早的领域),研究单位也日趋增多,以美国、日本、英国等国家为代表,研究 成果已经较为显著0.较为典型的有两个:一个是麻省理工学院(MIT)仿蓝鳍金枪鱼研 制的世界上第一条机器鱼RoboTuna(图1-6a),利用尾部和尾鳍的摆动实现游动,其 研究的目的是研制一种能克服目前水下潜器连续工作时间短、高效、快速的水下推进系 统,其后MIT又先后研制了改进版本“RoboPike”、“VCUUV),实现了第一个自主控 制的仿鱼机器人;另一个是英国埃塞克斯大学研制的小尺寸机器鱼仅用一台伺服电机 驱动机器鱼尾部可实现三维的灵活运动并达到自主控制,被认为是迄今为止仿真程度最 高的机器鱼,目前已经放在伦敦水族馆里进行展览,计划投放至西班牙附近海域,用于 探测水中污染物,并绘制河水的3D污染图叫,属于BC℉领域最新的研究成果,如图1-6b 所示。 (aMT研制的世界上第一条机器鱼 (⑥)英国机器鱼最新研究成果 图1-6BCP典型研究成果 虽然目前柔性鳍波动推进的游动机理尚不完全清晰,相关研究尚处于探索阶段,但 鳍波动推进仿生机器人的研究已于21世纪初受到各国水下仿生推进技术领域的热切关 注,相继取得了一些成果。目前已研制的鳍波动推进装置致动方式包括气压驱动,电磁 驱动,电机驱动,智能材料驱动等,下面分别进行简述 a.气压驱动 英国哈利尔特-瓦特大学(Heriot-Watt University)为研究长鳍波动推进方式及其在未 来水下航行器上的执行潜能,Sfakio takis等人于2001年最早研制了一套鳍波动推进实 验装置(如图l-7).该装置由8个并联膜盒致动器Parallel Bellows Actuator,.PBA)和弹性 材料制成的鳍面组成,PBA由气压驱动,每个PBA单独可控,可实现鳍条的三维运 动.实验装置可实现多种鳍面波形,能产生正、逆向推力。但由于气压驱动需要气压源, 体积庞大,且PBA“鳍条”自身惯量产生的侧向力比推力高出数十倍,因此距实际工程应 8
浙江大学博士学位论文 1.2.4仿鱼机器人研制进展 BCF推进模式的仿鱼机器人的研制最早始于上世纪90年代,是仿生水下机器人研 究开展较早的领域【31,研究单位也日趋增多,以美国、日本、英国等国家为代表,研究 成果已经较为显著凹】。较为典型的有两个:一个是麻省理工学院(MIT)仿蓝鳍金枪鱼研 制的世界上第一条机器鱼RoboTuIla【931(图1.6a),利用尾部和尾鳍的摆动实现游动,其 研究的目的是研制一种能克服目前水下潜器连续工作时间短、高效、快速的水下推进系 统,其后MIT又先后研制了改进版本“IbboPike”、·‘vCUUV’’【矧,实现了第一个自主控 制的仿鱼机器人;另一个是英国埃塞克斯大学研制的小尺寸机器鱼仅用一台伺服电机 驱动机器鱼尾部可实现三维的灵活运动并达到自主控制,被认为是迄今为止仿真程度最 高的机器鱼,目前已经放在伦敦水族馆里进行展览,计划投放至西班牙附近海域,用于 探测水中污染物,并绘制河水的3D污染图【舛】,属于BCF领域最新的研究成果,如图1.6b 所示。 (a)MlT研制的世界上第一条机器鱼 (b)英国机器鱼最新研究成果 图l-6BCF典型研究成果 虽然目前柔性鳍波动推进的游动机理尚不完全清晰,相关研究尚处于探索阶段,但 鳍波动推进仿生机器人的研究已于21世纪初受到各国水下仿生推进技术领域的热切关 注,相继取得了一些成果。目前已研制的鳍波动推进装置致动方式包括气压驱动,电磁 驱动,电机驱动,智能材料驱动等,下面分别进行简述。 a.气压驱动 英国哈利尔特.瓦特大学(Heriot.watt UIlivers时)为研究长鳍波动推进方式及其在未 来水下航行器上的执行潜能,Sf撕o taks等人于2001年最早研制了一套鳍波动推进实 验装置(如图1.7)。该装置由8个并联膜盒致动器(Parallel Bellows Acnlator,PBA)和弹性 材料制成的鳍面组成, PBA由气压驱动,每个PBA单独可控,可实现鳍条的三维运 动。实验装置可实现多种鳍面波形,能产生正、逆向推力。但由于气压驱动需要气压源, 体积庞大,且PBA“鳍条”自身惯量产生的侧向力比推力高出数十倍,因此距实际工程应 R
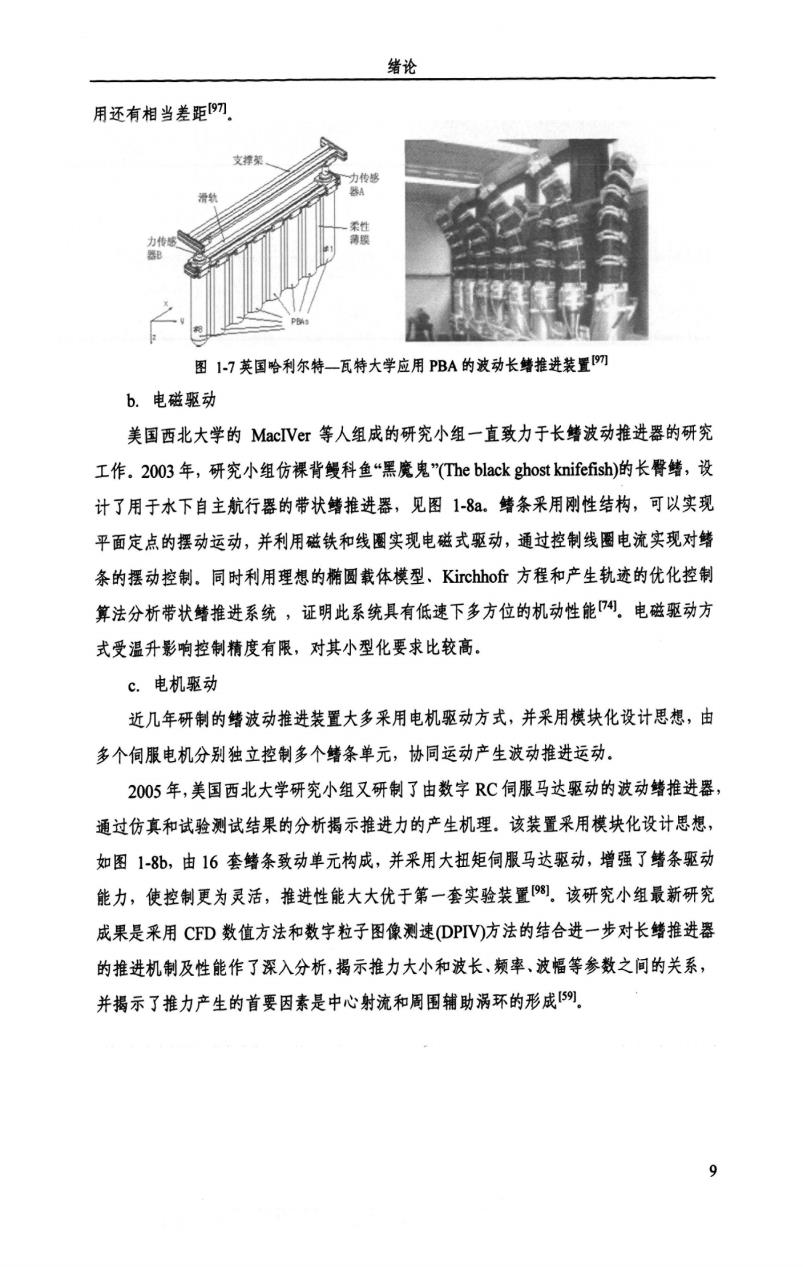
绪论 用还有相当差距叨 支撑架 力传感 柔性 力传 图1-7英国哈利尔特一瓦特大学应用PBA的波动长螬推进装置啊 b.电磁驱动 美国西北大学的MacIVer等人组成的研究小组一直致力于长鳍波动推进器的研究 工作。2003年,研究小组仿裸背鳗科鱼“黑魔鬼”(The black ghost knifefish)的长臀鳍,设 计了用于水下自主航行器的带状鳍推进器,见图1-8a。鳍条采用刚性结构,可以实现 平面定点的摆动运动,并利用磁铁和线圈实现电磁式驱动,通过控制线圈电流实现对鳍 条的摆动控制。同时利用理想的椭圆载体模型、Kirchhofr方程和产生轨迹的优化控制 算法分析带状鳍推进系统,证明此系统具有低速下多方位的机动性能。电磁驱动方 式受温升影响控制精度有限,对其小型化要求比较高。 c.电机驱动 近几年研制的鳍波动推进装置大多采用电机驱动方式,并采用模块化设计思想,由 多个伺服电机分别独立控制多个鳍条单元,协同运动产生波动推进运动 2005年,美国西北大学研究小组又研制了由数字RC伺服马达驱动的波动鳍推进器, 通过仿真和试验测试结果的分析揭示推进力的产生机理。该装置采用模块化设计思想, 如图1-8b,由16套鳍条致动单元构成,并采用大扭矩伺服马达驱动,增强了鳍条驱动 能力,使控制更为灵活,推进性能大大优于第一套实验装置)。该研究小组最新研究 成果是采用C℉D数值方法和数字粒子图像测速DPIV)方法的结合进一步对长鳍推进器 的推进机制及性能作了深入分析,揭示推力大小和波长、频率、波幅等参数之间的关系, 并揭示了推力产生的首要因素是中心射流和周围辅助涡环的形成5例 9
绪论 用还有相当差距【97】. 力传蕾 酗 F 一 图1.7英国哈利尔特一瓦特大学 b.电磁驱动 美国西北大学的MacⅣer等人组成的研究小组一直致力于长鳍波动推进器的研究 工作。2003年,研究小组仿裸背鳗科鱼“黑魔鬼”(m bl∞k gh0St蜥fefish)的长臀鳍,设 计了用于水下自主航行器的带状鳍推进器,见图1.8a。鳍条采用刚性结构,可以实现 平面定点的摆动运动,并利用磁铁和线圈实现电磁式驱动,通过控制线圈电流实现对鳍 条的摆动控制。同时利用理想的椭圆载体模型、l洫hho疔方程和产生轨迹的优化控制 算法分析带状鳍推进系统,证明此系统具有低速下多方位的机动性能彤】。电磁驱动方 式受温升影响控制精度有限,对其小型化要求比较高。 c.电机驱动 近几年研制的鳍波动推进装置大多采用电机驱动方式,并采用模块化设计思想,由 多个伺服电机分别独立控制多个鳍条单元,协同运动产生波动推进运动。 2005年,美国西北大学研究小组又研制了由数字Rc伺服马达驱动的波动鳍推进器, 通过仿真和试验测试结果的分析揭示推进力的产生机理。该装置采用模块化设计思想, 如图1.8b,由16套鳍条致动单元构成,并采用大扭矩伺服马达驱动,增强了鳍条驱动 能力,使控制更为灵活,推进性能大大优于第一套实验装置f981。该研究小组最新研究 成果是采用CFD数值方法和数字粒子图像测速(DPIV)方法的结合进一步对长鳍推进器 的推进机制及性能作了深入分析,揭示推力大小和波长、频率、波幅等参数之间的关系, 并揭示了推力产生的首要因素是中心射流和周围辅助涡环的形成【59】。 9
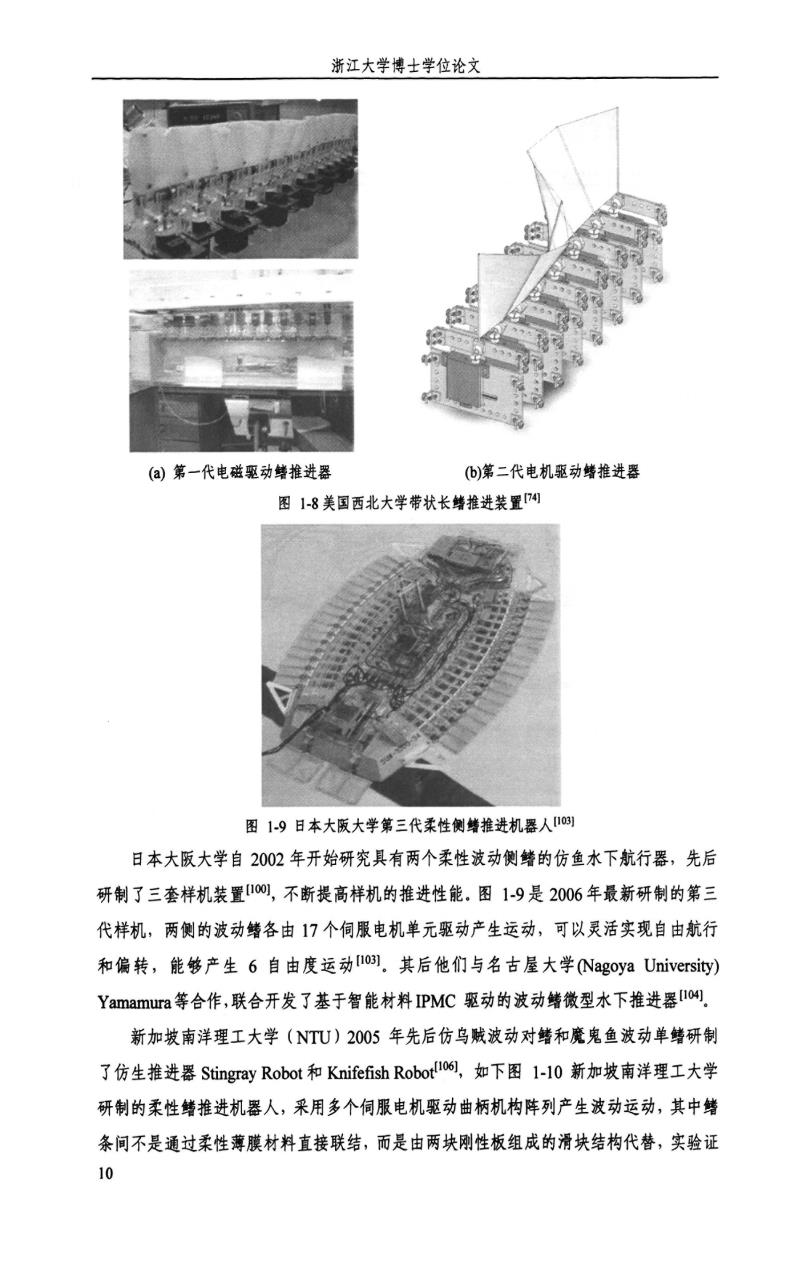
浙江大学博士学位论文 (a)第一代电磁驱动鳍推进器 (b)第二代电机驱动鳍推进器 图】-8美国西北大学带状长鳍推进装置7叫 图1-9日本大版大学第三代柔性侧鳍推进机器人 日本大阪大学自2002年开始研究具有两个柔性波动侧鳍的仿鱼水下航行器,先后 研制了三套样机装置10),不断提高样机的推进性能.图1-9是2006年最新研制的第三 代样机,两侧的波动鳍各由17个伺服电机单元驱动产生运动,可以灵活实现自由航行 和偏转,能够产生6自由度运动1o)。其后他们与名古屋大学Nagoya University) Yamamura等合作,联合开发了基于智能材料IPMC驱动的波动鳍微型水下推进器Io网。 新加坡南洋理工大学(NTU)2005年先后仿乌贼波动对鳍和魔鬼鱼波动单鳍研制 了仿生推进器Stingray Robot和Knifefish Robot,如下图1-l0新加坡南洋理工大学 研制的柔性鳍推进机器人,采用多个伺服电机驱动曲柄机构阵列产生波动运动,其中鳍 条间不是通过柔性薄膜材料直接联结,而是由两块刚性板组成的滑块结构代替,实验证 10
浙江大学博士学位论文 (a)第一代电磁驱动鳍推进器 (b)第二代电机驱动鳍推进器 图1.8美国西北大学带状长鳍推进装置【74】 图1.9日本大阪大学第三代柔性侧鳍推进机器人【1031 日本大阪大学自2002年开始研究具有两个柔性波动侧鳍的仿鱼水下航行器,先后 研制了三套样机装置【100】,不断提高样机的推进性能。图1.9是2006年最新研制的第三 代样机,两侧的波动鳍各由17个伺服电机单元驱动产生运动,可以灵活实现自由航行 和偏转,能够产生6自由度运动1103】。其后他们与名古屋大学(Nagoya UlliVersi够) Yama删珊等合作,联合开发了基于智能材料IPMC驱动的波动鳍微型水下推进器1104】。 新加坡南洋理工大学(NTU)2005年先后仿乌贼波动对鳍和魔鬼鱼波动单鳍研制 了仿生推进器S血增哪R0bot和跚fefish Ibbot【1061,如下图1.10新加坡南洋理工大学 研制的柔性鳍推进机器人,采用多个伺服电机驱动曲柄机构阵列产生波动运动,其中鳍 条间不是通过柔性薄膜材料直接联结,而是由两块刚性板组成的滑块结构代替,实验证 10