浙江大学博士学位论文 不例外。在推进系统整体设计尽可能简单、小型、灵活的前提下,如何保证能源、 水下通讯、水下动密封等技术的可靠性,是保证推进系统可靠运行的前提条件,缺 一不可。 (⑤)柔性鳍波动系统的推进性能实验研究 进行水下各项推进性能实验的前提是需要保证柔性鳍波动运动顺畅,能源供给充足, 水下密封可靠,人机通讯方式可靠,实验环境适合(如水流流速受风速影响较小)等,同 时对于柔性鳍的流场测量实验需要采用DPIV设备,实验条件要求很高,要求工况的随 机性较小,以上都是进行水下实验需要解决的关键问题0,同时在现有条件下,如何 获取柔性鳍波动推进的推进速度、推进力、转弯半径等推进性能参数,是水下推进性能 实验需要解决的关键问题。 1,4课题研究意义和主要研究内容 1.4.1研究背景及意义 近年来,随着陆地资源的日益枯竭,大规模的开发和利用海洋的各种资源将是人类 21世纪的伟大事业。水下机器人在海洋环境研究、海洋资源探测和海底侦察等方面广 阔的应用前景,使其成为探索、开发海洋资源和海洋防卫的重要工具,也成为相关研究 学者争相研究的热点。柔性鳍波动推进仿生机器人作为水下机器人的一种,相对于使用 传统螺旋浆推进器的水下机器人,它具有自己的一些特点和优势。相比后者能源利用率 较低,结构尺寸和重量大,对环境扰动大,噪音大,起动、加速性能差以及运动灵活性和 隐蔽性差等缺点,柔性鳍波动推进的鱼类具有较高的推进效率,优良的机动性能,噪音 低,对环境的扰动小等优势2,这些优势相对于BC℉推进模式的鱼类而言,依然是其 独特的优势。因此深入开展柔性鳍波动推进仿生机器人的研究,对于研制机动灵活、高 效的水下机器人具有重要的作用,也将极大的促进海洋勘探技术装备的开发。 本课题在国家自然科学基金项目N0.50675198)“基于水下头足类动物运动机理的 深海智能探测器研究”支持下开展研究,同时也得到浙江省自然科学基金杰出青年项目 (R1090453)的资助. 浙江大学流体传动及控制国家重点实验室近年来一直致力于深海资源探测、采样和 观测等方面的研究工作,并取得了相当的成果1).在海底资源探测方面,进行了水下 滑翔机的研究59),用于大范围的海底资源探测,以确定海淀热液口资源的大概位置。 在水下滑翔机探测到海底热液口的基础上,柔性鳍波动推进仿生机器人,可以用于水中 16
浙江大学博士学位论文 不例外。在推进系统整体设计尽可能简单、小型、灵活的前提下,如何保证能源、 水下通讯、水下动密封等技术的可靠性,是保证推进系统可靠运行的前提条件,缺 一不可。 (5)柔性鳍波动系统的推进性能实验研究 进行水下各项推进性能实验的前提是需要保证柔性鳍波动运动顺畅,能源供给充足, 水下密封可靠,人机通讯方式可靠,实验环境适合(如水流流速受风速影响较小)等,同 时对于柔性鳍的流场测量实验需要采用DPIV设备,实验条件要求很高,要求工况的随 机性较小,以上都是进行水下实验需要解决的关键问剐1501,同时在现有条件下,如何 获取柔性鳍波动推进的推进速度、推进力、转弯半径等推进性能参数,是水下推进性能 实验需要解决的关键问题。 1.4课题研究意义和主要研究内容 1.4.1研究背景及意义 近年来,随着陆地资源的日益枯竭,大规模的开发和利用海洋的各种资源将是人类 21世纪的伟大事业。水下机器人在海洋环境研究、海洋资源探测和海底侦察等方面广 阔的应用前景,使其成为探索、开发海洋资源和海洋防卫的重要工具,也成为相关研究 学者争相研究的热点。柔性鳍波动推进仿生机器人作为水下机器人的一种,相对于使用 传统螺旋浆推进器的水下机器人,它具有自己的一些特点和优势。相比后者能源利用率 较低,结构尺寸和重量大,对环境扰动大,噪音大,起动、加速性能差以及运动灵活性和 隐蔽性差等缺点,柔性鳍波动推进的鱼类具有较高的推进效率,优良的机动性能,噪音 低,对环境的扰动小等优势【1521。这些优势相对于BCF推进模式的鱼类而言,依然是其 独特的优势。因此深入开展柔性鳍波动推进仿生机器人的研究,对于研制机动灵活、高 效的水下机器人具有重要的作用,也将极大的促进海洋勘探技术装备的开发。 本课题在国家自然科学基金项目(No.50675198)“基于水下头足类动物运动机理的 深海智能探测器研究”支持下开展研究,同时也得到浙江省自然科学基金杰出青年项目 (R1090453)的资助。 浙江大学流体传动及控制国家重点实验室近年来一直致力于深海资源探测、采样和 观测等方面的研究工作,并取得了相当的成果【1531。在海底资源探测方面,进行了水下 滑翔机的研究【1591,用于大范围的海底资源探测,以确定海淀热液口资源的大概位置。 在水下滑翔机探测到海底热液口的基础上,柔性鳍波动推进仿生机器人,可以用于水中 16
绪论 小范围的、更准确的资源探测。另外,鉴于此类机器人机动能力比较强的特点,在水下 还能作为样品和数据采集及一些其它的水下作业平台。 虽然不少研究单位已初步研制了各种类型的柔性鳍波动推进装置,但离实际工程应 用还有很大距离。柔性鳍与周围流体间复杂的流体动力学问题一直是制约柔性鳍波动推 进技术深入发展的重要因素之一。本课题在项目资助下,在一些基础性和探素性的工作 层面上开展研究,开发基于柔性鳍波动的仿生推进系统,针对柔性鳍波动流体动力学问 题及仿生推进系统相关技术进行研究,为进一步研制成熟的柔性鳍波动推进仿生机器人 提供理论指导和技术支持。本论文研究的意义具体表现在以下方面: ()本论文对柔性鳍波动推进系统流体动力学问题的建模和数值计算分析,为进一步 深入研究柔性鳍波动推进系统复杂的流固耦合动力学提供解决思路和理论指导。 (②)柔性鳍波动推进仿生系统的研制过程中,对致动器及推进装置的柔性仿生设计及 相关技术难点的研究,可进一步发展和完善柔性鳍波动推进技术,所形成的技术 成果可加快研制更先进的柔性鳍波动仿生水下机器人,为海洋资源探测等作出贡 献。 1.4.2组织结构与主要研究内容 论文的组织结构如下:第一章综述了柔性鳍波动仿生系统的研究方法及现有研究成 果,概述了本论文的研究意义及主要研究内容;第二章提出了两种对柔性鳍波动推进系 统流体动力学建模的方法,即基于三维非定常流体控制方程组和基于流固耦合控制方程 组的柔性鳍波动系统动力学建模方法,并对两种建模方法进行了分析与比较:第三章提 出一种新型柔性长背鳍波动模型并通过波动性能试验对柔性鳍进行了优化,然后采用第 二章中提出的基于三维非定常流体控制方程组的建模方法对柔性长鳍进行动力学建模, 并采用CFD方法对模型实现三维非定常动态推进过程的数值求解;第四章在第三章研 究成果基础上设计并开发了柔性长鳍波动仿生推进系统样机,并进行了水下推进性能实 验和DPIV流场测量实验,同时与数值计算结果进行对比,验证数值计算结果的可靠性; 第五章在第四章研究成果基础上进一步改进,设计了柔性双鳍波动仿生系统,并采用第 二章提出的基于流固耦合控制方程组建模方法对柔性双鳍波动系统进行设计优化,最终 完成了柔性双鳍波动推进仿生系统的系统集成设计,并通过水下推进性能实验验证了双 鳍波动推进系统的可行性及良好的机动性。第6章为全文的总结,并对柔性鳍波动推进 仿生系统的发展趋势进行展望。 17
绪论 小范围的、更准确的资源探测。另外,鉴于此类机器人机动能力比较强的特点,在水下 还能作为样品和数据采集及一些其它的水下作业平台。 虽然不少研究单位已初步研制了各种类型的柔性鳍波动推进装置,但离实际工程应 用还有很大距离。柔性鳍与周围流体间复杂的流体动力学问题一直是制约柔性鳍波动推 进技术深入发展的重要因素之一。本课题在项目资助下,在一些基础性和探索性的工作 层面上开展研究,开发基于柔性鳍波动的仿生推进系统,针对柔性鳍波动流体动力学问 题及仿生推进系统相关技术进行研究,为进一步研制成熟的柔性鳍波动推进仿生机器人 提供理论指导和技术支持。本论文研究的意义具体表现在以下方面: (1) 本论文对柔性鳍波动推进系统流体动力学问题的建模和数值计算分析,为进一步 深入研究柔性鳍波动推进系统复杂的流固耦合动力学提供解决思路和理论指导。 (2) 柔性鳍波动推进仿生系统的研制过程中,对致动器及推进装置的柔性仿生设计及 相关技术难点的研究,可进一步发展和完善柔性鳍波动推进技术,所形成的技术 成果可加快研制更先进的柔性鳍波动仿生水下机器人,为海洋资源探测等作出贡 献。 1.4.2组织结构与主要研究内容 论文的组织结构如下:第一章综述了柔性鳍波动仿生系统的研究方法及现有研究成 果,概述了本论文的研究意义及主要研究内容;第二章提出了两种对柔性鳍波动推进系 统流体动力学建模的方法,即基于三维非定常流体控制方程组和基于流固耦合控制方程 组的柔性鳍波动系统动力学建模方法,并对两种建模方法进行了分析与比较;第三章提 出一种新型柔性长背鳍波动模型并通过波动性能试验对柔性鳍进行了优化,然后采用第 二章中提出的基于三维非定常流体控制方程组的建模方法对柔性长鳍进行动力学建模, 并采用CFD方法对模型实现三维非定常动态推进过程的数值求解;第四章在第三章研 究成果基础上设计并开发了柔性长鳍波动仿生推进系统样机,并进行了水下推进性能实 验和DPIv流场测量实验,同时与数值计算结果进行对比,验证数值计算结果的可靠性; 第五章在第四章研究成果基础上进一步改进,设计了柔性双鳍波动仿生系统,并采用第 二章提出的基于流固耦合控制方程组建模方法对柔性双鳍波动系统进行设计优化,最终 完成了柔性双鳍波动推进仿生系统的系统集成设计,并通过水下推进性能实验验证了双 鳍波动推进系统的可行性及良好的机动性。第6章为全文的总结,并对柔性鳍波动推进 仿生系统的发展趋势进行展望。 17
浙江大学博士学位论文 本论文的研究内容主要集中在柔性鳍波动推进仿生系统的一些基础性和探索性的 工作上,具体研究内容包括以下几个方面: ()基于动量守恒定律对柔性鳍波动推进进行水动力分析,并提出基于三维非定常 流体控制方程组和基于流固耦合控制方程组的柔性鳍波动系统动力学建模方法。 (②)分析总结鱼类柔性鳍波动推进特点及目前柔性鳍波动推进仿生装置研制现状基 础上,从功能仿生角度先后仿生刀鱼长鳍及仿生枪乌贼侧鳍,采用单电机驱动, 分别采用往复摆动运动的致动方式及往复直线运动的致动方式作为柔性鳍的振 源,设计开发了两种柔性鳍波动推进仿生系统,实现柔性鳍的波动传递,波动 致动方式新颖,具有良好的推进性能及机动性能,为研制柔性鳍波动仿生机器 人提供新的仿生设计思路和设计经验. (3)针对柔性鳍波动的复杂动力学问题,本文以设计开发的柔性鳍为建模对象,采 用基于流体控制方程的CFD方法和基于流固耦合控制方程的数值计算方法对 柔性鳍波动运动进行三维数值计算,揭示流体压力场、速度场的分布特征,以 及波动过程中推进力的变化规律。同时对两种数值实现方法进行分析比较,分 析数值计算方法的适用性和推广性。 (4)对柔性长鳍波动推进仿生系统开展一系列相关的实验研究,包括柔性鳍波动性 能实验,仿生样机水下推进性能实验,柔性鳍流场测量DPIV实验等,验证系 统的可靠性及数值计算结果的合理性, 1.5本章小结 本章介绍了柔性鳍波动仿生系统的研究背景,概述了柔性鳍波动推进在理论研究、 数值模型研究、实验研究及仿生模型研制等方面的国内外研究进展,分析了柔性鳍波动 推进系统的关键技术及难点,阐述了本课题的研究目的、意义和主要研究内容,可总结 出以下一些结论: 1)柔性鳍波动推进方式相比传统的螺旋桨推进方式及BC℉推进方式而言,有其独 特的优势。在低速场合下它具有较高的推进效率,优良的机动性和稳定性,抗干扰能力 强,噪音小,非常适用于对环境机动性要求较高的复杂应用场合,如在海洋极端环境下 进行资源探测等 2)目前国际上已开发了多种多样的柔性鳍波动推进仿生模型,在理论研究、数值计 算、实验研究等方面都有不同程度的研究成果,然而柔性鳍波动推进机理还在研究探索 18
浙江大学博士学位论文 本论文的研究内容主要集中在柔性鳍波动推进仿生系统的一些基础性和探索性的 工作上,具体研究内容包括以下几个方面: (1)基于动量守恒定律对柔性鳍波动推进进行水动力分析,并提出基于三维非定常 流体控制方程组和基于流固耦合控制方程组的柔性鳍波动系统动力学建模方法。 (2)分析总结鱼类柔性鳍波动推进特点及目前柔性鳍波动推进仿生装置研制现状基 础上,从功能仿生角度先后仿生刀鱼长鳍及仿生枪乌贼侧鳍,采用单电机驱动, 分别采用往复摆动运动的致动方式及往复直线运动的致动方式作为柔性鳍的振 源,设计开发了两种柔性鳍波动推进仿生系统,实现柔性鳍的波动传递,波动 致动方式新颖,具有良好的推进性能及机动性能,为研制柔性鳍波动仿生机器 人提供新的仿生设计思路和设计经验。 (3)针对柔性鳍波动的复杂动力学问题,本文以设计开发的柔性鳍为建模对象,采 用基于流体控制方程的CFD方法和基于流固耦合控制方程的数值计算方法对 柔性鳍波动运动进行三维数值计算,揭示流体压力场.速度场的分布特征,以 及波动过程中推进力的变化规律。同时对两种数值实现方法进行分析比较,分 析数值计算方法的适用性和推广性。 (4)对柔性长鳍波动推进仿生系统开展一系列相关的实验研究,包括柔性鳍波动性 能实验,仿生样机水下推进性能实验,柔性鳍流场测量DPIV实验等,验证系 统的可靠性及数值计算结果的合理性。 1.5本章小结 本章介绍了柔性鳍波动仿生系统的研究背景,概述了柔性鳍波动推进在理论研究、 数值模型研究、实验研究及仿生模型研制等方面的国内外研究进展,分析了柔性鳍波动 推进系统的关键技术及难点,阐述了本课题的研究目的、意义和主要研究内容,可总结 出以下一些结论: 11柔性鳍波动推进方式相比传统的螺旋桨推进方式及BCF推进方式而言,有其独 特的优势。在低速场合下它具有较高的推进效率,优良的机动性和稳定性,抗干扰能力 强,噪音小,非常适用于对环境机动性要求较高的复杂应用场合,如在海洋极端环境下 进行资源探测等。 2)目前国际上已开发了多种多样的柔性鳍波动推进仿生模型,在理论研究,数值计 算、实验研究等方面都有不同程度的研究成果,然而柔性鳍波动推进机理还在研究探索 1 R
绪论 中,仿生推进模型的研制也都处于实验室研究阶段,离实际的工程应用还有很大距离。 3)柔性鳍波动推进复杂流体动力学问题是制约柔性鳍波动推进技术进一步发展和 提高仿生机器人推进性能的重要因素之一,深入研究和探索柔性鳍波动推进流体动力学 问题是非常必要和迫切的。 19
绪论 中,仿生推进模型的研制也都处于实验室研究阶段,离实际的工程应用还有很大距离。 3)柔性鳍波动推进复杂流体动力学问题是制约柔性鳍波动推进技术进一步发展和 提高仿生机器人推进性能的重要因素之一,深入研究和探索柔性鳍波动推进流体动力学 问题是非常必要和迫切的。 19
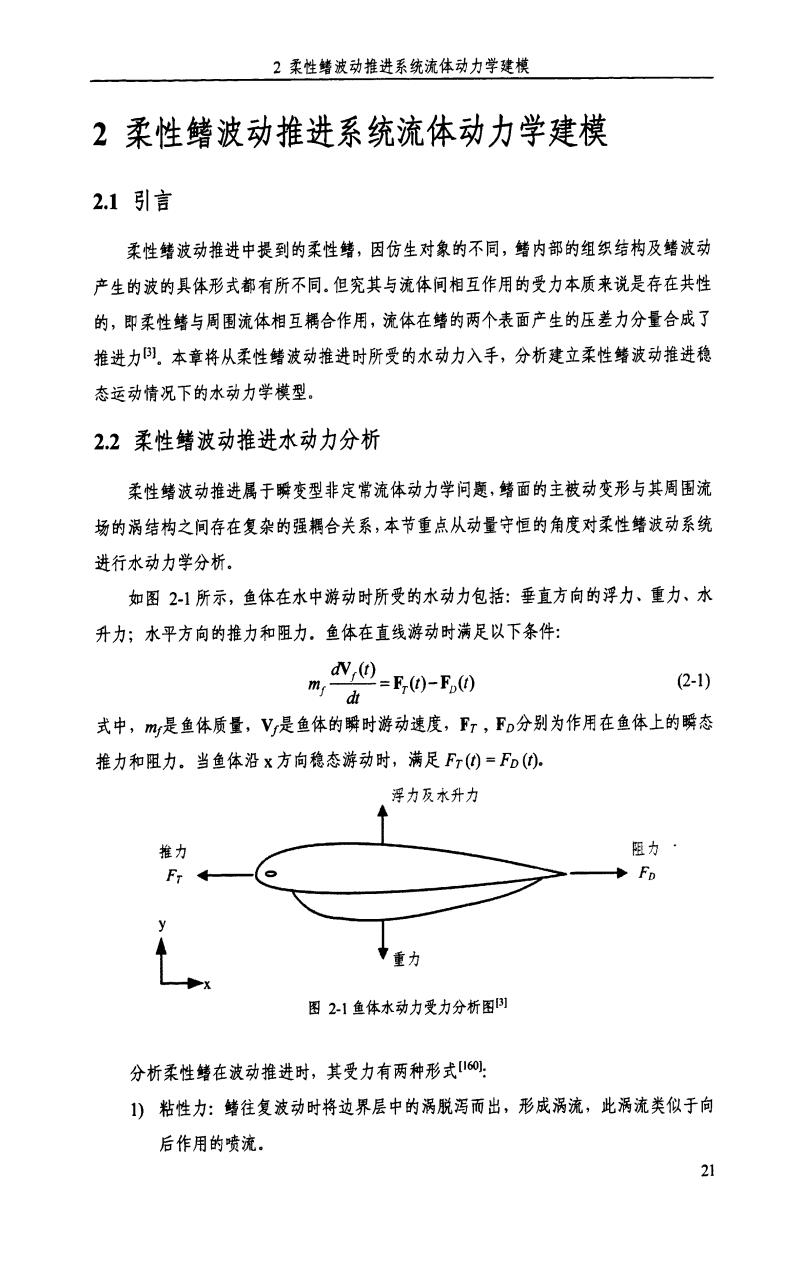
2柔性鳍波动推进系统流体动力学建模 2 柔性鳍波动推进系统流体动力学建模 2.1引言 柔性鳍波动推进中提到的柔性鳍,因仿生对象的不同,鳍内部的组织结构及鳍波动 产生的波的具体形式都有所不同。但究其与流体间相互作用的受力本质来说是存在共性 的,即柔性鳍与周围流体相互耦合作用,流体在鳍的两个表面产生的压差力分量合成了 推进力)。本章将从柔性鳍波动推进时所受的水动力入手,分析建立柔性鳍波动推进稳 态运动情况下的水动力学模型 2.2柔性鳍波动推进水动力分析 柔性鳍波动推进属于瞬变型非定常流体动力学问题,鳍面的主被动变形与其周围流 场的涡结构之间存在复杂的强耦合关系,本节重点从动量守恒的角度对柔性鳍波动系统 进行水动力学分析。 如图2-1所示,鱼体在水中游动时所受的水动力包括:垂直方向的浮力、重力、水 升力;水平方向的推力和阻力。鱼体在直线游动时满足以下条件: dv,(t) ms di =f0)-F) (2-1) 式中,m是鱼体质量,V是鱼体的瞬时游动速度,Fr,FD分别为作用在鱼体上的瞬态 推力和阻力。当鱼体沿x方向稳态游动时,满足Fr(①=FD() 浮力反水升力 推力 阻力· Fr Fp T重力 图21鱼体水动力受力分析图) 分析柔性鳍在波动推进时,其受力有两种形式6o: 1)粘性力:鳍往复波动时将边界层中的满脱泻而出,形成涡流,此涡流类似于向 后作用的喷流。 21
2柔性鳍波动推进系统流体动力学建模 2柔性鳍波动推进系统流体动力学建模 2.1引言 柔性鳍波动推进中提到的柔性鳍,因仿生对象的不同,鳍内部的组织结构及鳍波动 产生的波的具体形式都有所不同。但究其与流体间相互作用的受力本质来说是存在共性 的,即柔性鳍与周围流体相互耦合作用,流体在鳍的两个表面产生的压差力分量合成了 推进力【”。本章将从柔性鳍波动推进时所受的水动力入手,分析建立柔性鳍波动推进稳 态运动情况下的水动力学模型。 2.2柔性鳍波动推进水动力分析 柔性鳍波动推进属于瞬变型非定常流体动力学问题,鳍面的主被动变形与其周围流 场的涡结构之间存在复杂的强耦合关系,本节重点从动量守恒的角度对柔性鳍波动系统 进行水动力学分析。 如图2.1所示,鱼体在水中游动时所受的水动力包括:垂直方向的浮力、重力、水 升力;水平方向的推力和阻力。鱼体在直线游动时满足以下条件: 谢?‘t、 朋r半=BO)一R(f) (2一1) J 出 ”。 “、‘ 、 。 式中,m厂是鱼体质量,v厂是鱼体的瞬时游动速度,F7_,FD分别为作用在鱼体上的瞬态 推力和阻力。当鱼体沿x方向稳态游动时,满足乃(力=而(力。 浮力及农升力 推力 Ft●—一 图2.1鱼体水动力受力分析图【31 阻力 ——一◆疡 分析柔性鳍在波动推进时,其受力有两种形式【嘲1: 1)粘性力:鳍往复波动时将边界层中的涡脱泻而出,形成涡流,此涡流类似于向 后作用的喷流。 21 歹k