绪论 1绪论 1.1研究背景 随着社会的不断发展,人类对陆地资源的开发需求日益膨胀,势必导致陆地资源的 日益减少和枯竭。而约占地球总面积71%的海洋中蕴藏着极其丰富的海洋生物资源、 矿产资源和海洋能源,人类开发和利用海洋的脚步将随着资源需求的增加和科技的进步 而逐渐加快。水下机器人在海洋环境研究、海洋资源探测和海底侦察等民用领域和海洋 军事方面都具有广阔的应用前景和巨大的潜在价值,已成为探索、开发海洋资源和海洋 防卫的重要工具,吸引了研究者们越来越多的注意力川. 水下机器人技术涉及多种学科和技术领域的知识,关键技术之一就是水下推进技术。 常规的水下推进有螺旋桨推进和喷射推进等两种主要方式,常见的水下机器人如自治水 下机器人(Autonomous Underwater Vehicle,AUV)、遥控水下机器人(Remotely Operated Vehicle,ROV)等多采用传统的螺旋桨作为推进器,而喷射推进方式主要应用于舰船、潜 艇等高速航行体中,两种推进技术在实际应用中有着不可替代的优势,理论研究和实际 应用都已经比较成熟四。但二者仍然存在一些自身的不足,如结构尺寸和重量大,对环 境扰动大,噪音大,运动灵活性和隐蔽性较差等,应用场合受到限制吲 海洋中的水生生物经过漫长的自然进化,发展了各具特色的水中运动能力,能够在 复杂多变的环境中生存。拥有非凡游动能力的鱼类,不仅能以较低的能耗和较高的游动 效率长距离地巡游,还可以在较高的游动速度下实现快速的机动响应阿。随着海洋经济 的发展和军事需求的增加,水下生物的高效率、低噪声、高机动性等特点,成为科学家们 日益关注的焦点,纷纷展开各种基于水下生物运动机理研究的仿生水下推进技术的研究, 希望在海洋资源探测、侦察等对噪声和机动性要求较高的领域得到更多的应用,这将极 大的促进海洋的勘探和开发阿.目前国内外在仿鱼水下推进、仿生喷射推进、仿多足爬 行动物水下推进、仿蠕虫水下推进等方面都展开了相关的研究,其中以仿鱼水下推进的 研究占大多数. 仿鱼水下推进方式根据鱼类推进使用身体部位的不同来分类,主要分为身体/尾鳍 (body and/or caudal fin,.简称BCF)推进模式和中央鳍/对鳍(median and/or paired fin..简称 MPF)推进模式IO)。波动运动和摆动运动是鱼类游动的两种基本方式,BCF推进模式和 MP℉推进模式都包括了从纯波动到纯摆动的推进方式B例.具体分类情况见图1-1,图中 1
绪论 1绪论 1.1研究背景 随着社会的不断发展,人类对陆地资源的开发需求日益膨胀,势必导致陆地资源的 日益减少和枯竭。而约占地球总面积71%的海洋中蕴藏着极其丰富的海洋生物资源、 矿产资源和海洋能源,人类开发和利用海洋的脚步将随着资源需求的增加和科技的进步 而逐渐加快。水下机器人在海洋环境研究、海洋资源探测和海底侦察等民用领域和海洋 军事方面都具有广阔的应用前景和巨大的潜在价值,已成为探索、开发海洋资源和海洋 防卫的重要工具,吸引了研究者们越来越多的注意力【11。 水下机器人技术涉及多种学科和技术领域的知识,关键技术之一就是水下推进技术。 常规的水下推进有螺旋桨推进和喷射推进等两种主要方式。常见的水下机器人如自治水 下机器人(Autonomous Undem瞰er Vellicle,AUV)、遥控水下机器人(R.emotely Openated vellicle,ROv)等多采用传统的螺旋桨作为推进器,而喷射推进方式主要应用于舰船、潜 艇等高速航行体中,两种推进技术在实际应用中有着不可替代的优势,理论研究和实际 应用都已经比较成熟【21。但二者仍然存在一些自身的不足,如结构尺寸和重量大,对环 境扰动大,噪音大,运动灵活性和隐蔽性较差等,应用场合受到限制【31。 海洋中的水生生物经过漫长的自然进化,发展了各具特色的水中运动能力,能够在 复杂多变的环境中生存。拥有非凡游动能力的鱼类,不仅能以较低的能耗和较高的游动 效率长距离地巡游,还可以在较高的游动速度下实现快速的机动响应151。随着海洋经济 的发展和军事需求的增加,水下生物的高效率、低噪声、高机动性等特点,成为科学家们 日益关注的焦点,纷纷展开各种基于水下生物运动机理研究的仿生水下推进技术的研究, 希望在海洋资源探测、侦察等对噪声和机动性要求较高的领域得到更多的应用,这将极 大的促进海洋的勘探和开发【61。目前国内外在仿鱼水下推进、仿生喷射推进、仿多足爬 行动物水下推进、仿蠕虫水下推进等方面都展开了相关的研究,其中以仿鱼水下推进的 研究占大多数【6】. 仿鱼水下推进方式根据鱼类推进使用身体部位的不同来分类,主要分为身体/尾鳍 (body锄讹r c卸dal fh简称BCF)推进模式和中央鳍/对鳍(mediaIl锄d/or p疵d fin,简称 MPF)推进模式【lo】。波动运动和摆动运动是鱼类游动的两种基本方式,BCF推进模式和 MPF推进模式都包括了从纯波动到纯摆动的推进方式【31。具体分类情况见图1.1,图中 . 1

浙江大学博士学位论文 阴影部分表示鱼类推进使用的身体部位 级乒 三鳍彩 糖实毛 L 波动 摆动 间BCF推造模式 胸峰 青蜂 骨鳍 背鳍和臀鳕 等超 奥实纪 日够豆 傈背缓 鳞实无 波动鳍 隆头鱼 实和 摆动啭 6①《 )MPF推进模式 图1-1鱼类推进模式分类) BC℉推进模式是鱼类最常见的推进模式,通过波动或摆动身体的某部分和/域尾鳍, 向后推动身体周围的水,借助反作用力产生推进运动。从进化论观点来说BC℉推进模 式是较优的推进模式,它可以产生较大的推进力,具备较优的加速和起动性能,能长时 间以较高的速度巡游,大多数鱼类通过此种推进模式产生推进力,有约85%的鱼类以 BCF推进模式作为主要的推进方式)] MP℉推进模式以背鳍、臀鳍、胸鳍和腹鳍作为主要的推进部位,依靠多种柔性鳍 产生不同方向的推进力。与BC℉推进模式相比,虽然游动速度一般不高,但在低速场 合下它具有较高的推进效率,优良的机动性和稳定性,抗干扰能力强),非常适用于 对环境机动性要求较高的复杂应用场合,如在海洋极端环境下进行资源探测等。因此, 对MP℉推进模式的机理研究和仿鱼机器人的研制对未来新型水下推进器的研制有重要 的研究价值,将极大促进海洋的勘探和开发。 1.2柔性鳍波动仿生系统研究进展 在MPP推进模式分类中,依靠鳍的波动运动来实现推进的包括鳐科模式(Rajiform 弓鳍目模式(Amiiform)、裸背曼科模式(Gymnotiform)、鳞鲀科模式(Balistiform),它们分 别利用胸鳍、背鳍、臀鳍和背臀鳍的波动运动产生推进力,如图1-2所示。研究表明, 鳐科模式游动通过波动或摆动硕大柔韧的胸鳍实现吼,号鳍目鱼类和裸背曼科鱼类身 体是柔性的,能够弯曲,但他们游动时身体保持直线,依靠柔性长背鳍或长臀鳍波动产 2
浙江大学博士学位论文 阴影部分表示鱼类推进使用的身体部位. 互茹■副《爻]蕊] /‘弋、~,)—二一 波动鳐 撂动铭 胸鳍 (I)BCF推进模式 膏鸶 鲁蟹 背鳍和臀鳍 因蚓 ∞肝F推选横式 因婚 图卜1鱼类推进模式分类‘3】 BCF推进模式是鱼类最常见的推进模式,通过波动或摆动身体的某部分和成尾鳍, 向后推动身体周围的水,借助反作用力产生推进运动。从进化论观点来说BCF推进模 式是较优的推进模式,它可以产生较大的推进力,具备较优的加速和起动性能,能长时 间以较高的速度巡游,大多数鱼类通过此种推进模式产生推进力,有约85%的鱼类以 BCF推进模式作为主要的推进方式【31。 MPF推进模式以背鳍、臀鳍、胸鳍和腹鳍作为主要的推进部位,依靠多种柔性鳍 产生不同方向的推进力。与BCF推进模式相比,虽然游动速度一般不高,但在低速场 合下它具有较高的推进效率,优良的机动性和稳定性,抗干扰能力强【12】,非常适用于 对环境机动性要求较高的复杂应用场合,如在海洋极端环境下进行资源探测等。因此, 对MPF推进模式的机理研究和仿鱼机器人的研制对未来新型水下推进器的研制有重要 的研究价值,将极大促进海洋的勘探和开发。 1.2柔性鳍波动仿生系统研究进展 在MPF推进模式分类中,依靠鳍的波动运动来实现推进的包括鳐科模式(Ihjifom)、 弓鳍目模式(Amiifoml)、裸背曼科模式(GyInnotifom)、鳞鲍科模式(BaliStifom),它们分 别利用胸鳍、背鳍、臀鳍和背臀鳍的波动运动产生推进力,如图1.2所示。研究表明, 鳐科模式游动通过波动或摆动硕大柔韧的胸鳍实现【141;弓鳍目鱼类和裸背曼科鱼类身 体是柔性的,能够弯曲,但他们游动时身体保持直线,依靠柔性长背鳍或长臀鳍波动产 2 一 通 习; 国 图 甲; 图
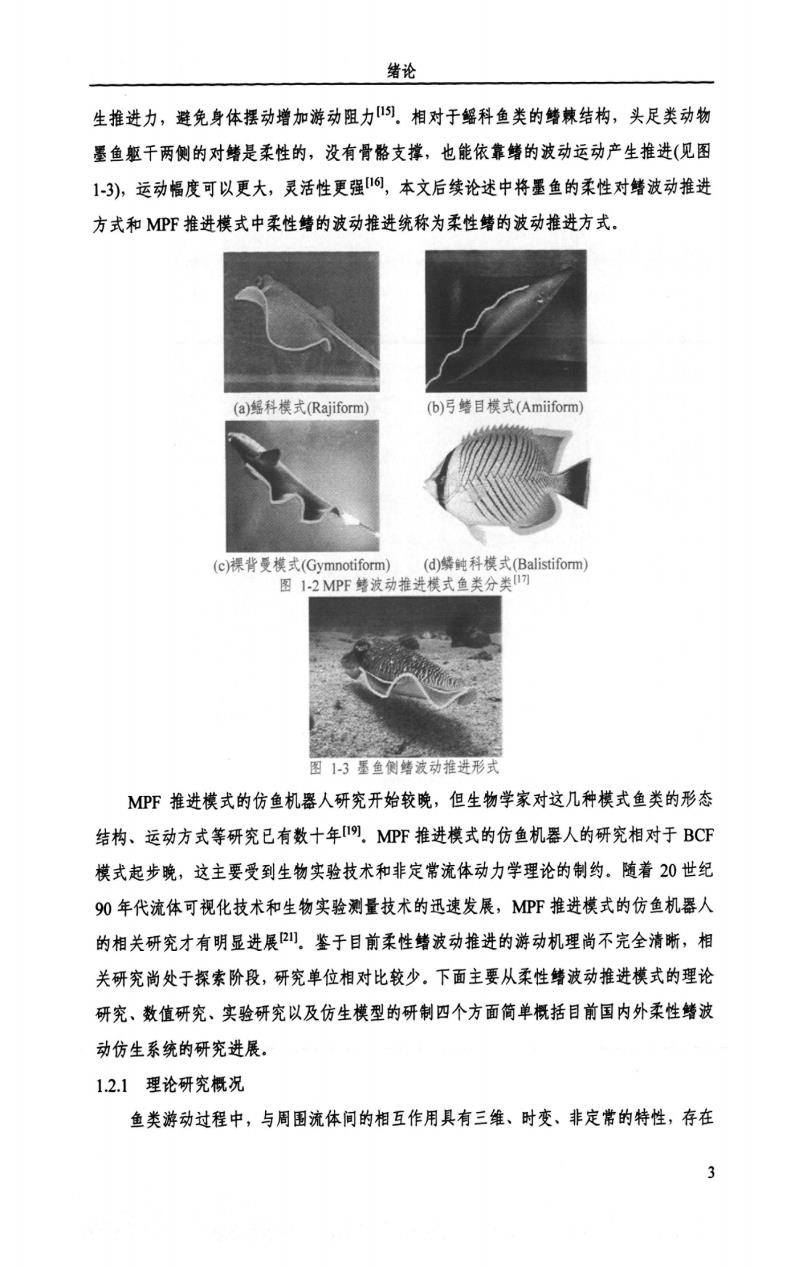
绪论 生推进力,避免身体摆动增加游动阻力的相对于鳐科鱼类的鳍棘结构,头足类动物 墨鱼躯干两侧的对鳍是柔性的,没有骨骼支撑,也能依靠鳍的波动运动产生推进(见图 1-3),运动幅度可以更大,灵活性更强6,本文后续论述中将墨鱼的柔性对鳍波动推进 方式和MP℉推进模式中柔性鳍的波动推进统称为柔性鳍的波动推进方式。 (a)鳐科模式(Rajiform) (b)弓鳍目模式(Amiiform) (c)棵背受模式(Gymnotiform))(d鳞钟科模式(Balistiform) 图1-2MPF鳍波动推进模式鱼类分类7 图1-3墨鱼侧鳍波动推进形式 MP℉推进模式的仿鱼机器人研究开始较晚,但生物学家对这几种模式鱼类的形态 结构、运动方式等研究已有数十年叨.MPPF推进模式的仿鱼机器人的研究相对于BCP 模式起步晚,这主要受到生物实验技术和非定常流体动力学理论的制约。随着20世纪 90年代流体可视化技术和生物实验测量技术的迅速发展,MP℉推进模式的仿鱼机器人 的相关研究才有明显进展四。鉴于目前柔性鳍波动推进的游动机理尚不完全清晰,相 关研究尚处于探索阶段,研究单位相对比较少。下面主要从柔性鳍波动推进模式的理论 研究、数值研究、实验研究以及仿生模型的研制四个方面简单概括目前国内外柔性鳍波 动仿生系统的研究进展。 1.2.1理论研究概况 鱼类游动过程中,与周围流体间的相互作用具有三维、时变、非定常的特性,存在 3
绪论 生推进力,避免身体摆动增加游动阻力‘151。相对于鳐科鱼类的鳍棘结构,头足类动物 墨鱼躯干两侧的对鳍是柔性的,没有骨骼支撑,也能依靠鳍的波动运动产生推进(见图 1.3),运动幅度可以更大,灵活性更强【№】,本文后续论述中将墨鱼的柔性对鳍波动推进 方式和MPF推进模式中柔性鳍的波动推进统称为柔性鳍的波动推进方式。 (a)鳐科模式(Rajif01111) 一 (b)弓鳍目模式(Amiifom) (c)裸背曼模式(Gymnotif011T1) (d)鳞纯科模式(Bali Stif0砷) 图1.2 MPF鳍波动推进模式鱼类分类㈣ 兰】一3墨兰。班鳍:厦动雀连形支 MPF推进模式的仿鱼机器人研究开始较晚,但生物学家对这几种模式鱼类的形态 结构、运动方式等研究已有数十年【191.MPF推进模式的仿鱼机器人的研究相对于BCF 模式起步晚,这主要受到生物实验技术和非定常流体动力学理论的制约。随着20世纪 90年代流体可视化技术和生物实验测量技术的迅速发展,MPF推进模式的仿鱼机器人 的相关研究才有明显进展f2¨。鉴于目前柔性鳍波动推进的游动机理尚不完全清晰,相 关研究尚处于探索阶段,研究单位相对比较少。下面主要从柔性鳍波动推进模式的理论 研究、数值研究、实验研究以及仿生模型的研制四个方面简单概括目前国内外柔性鳍波 动仿生系统的研究进展。 1.2.1理论研究概况 鱼类游动过程中,与周围流体间的相互作用具有三维、时变、非定常的特性,存在 3
浙江大学博士学位论文 涡流、虚质量效应等,因此很难建立一种适用性强、描述准确、与实验研究相符合的鱼 类游动推进理论21.从19世纪20年代开始就有学者对鱼类游动机理进行研究,开展 了大量的工作,并取得了长足的进展。按照主要作用力的不同,目前的波动推进理论主 要可以分为抗力理论(Resistive Force Theory)和反作用力理论(Reactive Force Theory)两 大类,前者强调水的粘性力作用,后者强调机体在无粘流体中波动时的惯性力作用。反 作用力理论发展迅速,相对较为完善,主要包括细长体理论Elongated Body Theory,EBT)、 波动板理论(Wave Plate Theory,WPT)和作动盘理论(Actuator Disc Theory,ADT三种21. 抗力理论研究开始较早,1952年,Geoffrey Taylor针对水生动物游动的流体动力学 进行定量分析,主要考虑流体的粘性力,依据流体与机体间相互作用的静力学平衡,分 析游动体的动力学特性。该理论忽略了流体的惯性力,只适用于分析游动时雷诺数很低 (Re小于1)的微小水生动物的运动规律2可. 细长体理论是Lighthill于1960年首次将分析空气动力学的理论引入鱼类游动过程 的流体力学研究中,建立了用于分析鱼类鲹科模式游动推进的数学模型9,此后又在 此基础上建立了“细长体理论”和“大摆幅细长体理论”(Large Amplitude Elongated Body Theory,LAEBT)B0。该理论将流体的三维非定常流动简化成准平面非定常流动,并依据 扰动原理简化微分方程,推导出鱼类游动运动的推进力、推进效率计算公式。该理论被 广泛用于分析鳗鲡、鲹科等BC℉推进模式的鱼类游动中。 “二维波动板理论”最早由吴耀祖于1960年提出B,此后童秉纲等人又建立了“三维 波动板理论”,运用该理论对三种游动模式进行分析,给出了定量的三维非定常理论描述, 揭示了鱼类外形演化与游动方式之间的形态适应关系,得出在某种条件下波状游动能减 弱三维效应的结论B)].2001年,吴耀祖全面评述了相关的理论研究工作B8别。目前,“三 维波动板理论”已被国际同行广泛接纳,普遍适用于波动鳍的机械特性以及肌体运动与 力之间的动态关系o。 以上理论主要适用于分析BCF推进模式的鱼类,对于MP℉推进模式理论成果较少, 主要是Lighthill和Blake等人所做的工作.目前对柔性鳍波动推进机理的研究尚不明晰, 柔性长鳍波动推进器在流体中自身推进游动,可以认为是通过鳍波动产生附加质量进行 能量和动量传输,且柔性鳍波动被证实是一种有效的动量传递方式4).1990年,Lighthill 在JFM(Journal of Fluid Mechanics)连续发表了关于应用LAEBT分析Balistiform和 Gymonotif0rm模式柔性长鳍波动推进性能的论文,对波动鳍推进模式的流体动力学进行 了分析,并对推进过程中的运动学特性、压力沿身体的分布特征、动量增强机制及运动
浙江大学博士学位论文 涡流、虚质量效应等,因此很难建立一种适用性强、描述准确、与实验研究相符合的鱼 类游动推进理论‘231。从19世纪20年代开始就有学者对鱼类游动机理进行研究,开展 了大量的工作,并取得了长足的进展。按照主要作用力的不同,目前的波动推进理论主 要可以分为抗力理论(R.esistive Force Theo巧)和反作用力理论(RIeactive Force Theo巧)两 大类,前者强调水的粘性力作用,后者强调机体在无粘流体中波动时的惯性力作用。反 作用力理论发展迅速,相对较为完善,主要包括细长体理论(Elongated Body Theo巧,EBT)、 波动板理论(wave P1ate Theory,WPT)和作动盘理论(Actuator Disc T11eow,ADT)三种【26】。 抗力理论研究开始较早,1952年,Geo触y Taylor针对水生动物游动的流体动力学 进行定量分析,主要考虑流体的粘性力,依据流体与机体间相互作用的静力学平衡,分 析游动体的动力学特性。该理论忽略了流体的惯性力,只适用于分析游动时雷诺数很低 (Re小于1)的微小水生动物的运动规律口71。 细长体理论是Lig州ll于1960年首次将分析空气动力学的理论引入鱼类游动过程 的流体力学研究中,建立了用于分析鱼类鲣科模式游动推进的数学模型1291,此后又在 此基础上建立了“细长体理论”和“大摆幅细长体理论”(Large AInplitude Elongated Body Theo巧,L垣BT)【301。该理论将流体的三维非定常流动简化成准平面非定常流动,并依据 扰动原理简化微分方程,推导出鱼类游动运动的推进力、推进效率计算公式。该理论被 广泛用于分析鳗鲡、鲣科等BCF推进模式的鱼类游动中。 “二维波动板理论,’最早由吴耀祖于1960年提出【321,此后童秉纲等人又建立了t-三维 波动板理论”,运用该理论对三种游动模式进行分析,给出了定量的三维非定常理论描述, 揭示了鱼类外形演化与游动方式之间的形态适应关系,得出在某种条件下波状游动能减 弱三维效应的结论【351。2001年,吴耀祖全面评述了相关的理论研究工作【38】。目前,-·三 维波动板理论”已被国际同行广泛接纳,普遍适用于波动鳍的机械特性以及肌体运动与 力之间的动态关系【401。 以上理论主要适用于分析BcF推进模式的鱼类,对于MPF推进模式理论成果较少, 主要是Ligh吐lill和Blake等人所做的工作。目前对柔性鳍波动推进机理的研究尚不明晰, 柔性长鳍波动推进器在流体中自身推进游动,可以认为是通过鳍波动产生附加质量进行 能量和动量传输,且柔性鳍波动被证实是一种有效的动量传递方式【431。1990年,Ligl恤iU 在巧M(Jo哪al of Fluid MechaIlics)连续发表了关于应用LAEBT分析&l胁蜘,.聊和 国册D以D啪删模式柔性长鳍波动推进性能的论文,对波动鳍推进模式的流体动力学进行 了分析,并对推进过程中的运动学特性、压力沿身体的分布特征、动量增强机制及运动 4
绪论 波测量与动量间的关系进行了研究,在一定程度上定性或定量的解释一些现象,且得到 许多有价值的结论,但距离问题的彻底解决还存在较大差距.从工程应用角度来说, 这些理论方法所建立的流体力学模型过于繁琐,计算量偏大,很难有效适用于实际的工 程设计应用中。 1.2.2数值模型研究现状 近年来,随着计算机技术和复杂流体计算方法的发展,数值计算方法已成为分析鱼 类游动机理和设计仿鱼水下推进器的重要手段之一。计算流体力学(Computational Fluid Dynamics,CFD)方法基本原理是通过数值求解表征流体流动的微分方程,得出流体流动 的流场在连续区域上的离散分布,从而近似模拟流体流动情况,C℉D已经在研究领域 以及工业领域得到广泛应用,其网格生成技术和微分方程求解算法已趋于成熟,稳定性 已得到广泛的验证. 近年来采用C℉D方法对鱼类游动及多种仿鱼机器人进行数值模拟的研究单位有很 多。典型的例子有:在鱼类游动研究方面,Zhu(2002)及Ramamurti(1992-2002)等分别 对金枪鱼的游动特征做了大量的二维与三维数值模拟工作4门;夏(2005)采用有限体积 法和动网格技术,模拟了鱼类的波状摆动推进S):Km(2006)对鳗鲡波状运动进行了 CFD优化分析,给出尾迹三维涡环结构等S。在仿鱼机器人研究方面,Sigh(2004)等 基于CFD仿真参数进行了仿胸鳍推进的仿生AUV的控制设计5,Sarkar(2O05)通过数 值模拟考察了翼型各种参数(平均攻角、摆动幅度、频率和位置等)对推力大小产生的影 响,为基于摆动尾鳍推进的仿生机器鱼(如鲔科模式、箱鲀科模式)的设计提供理论依据 5,Takashi(2006)分析了波动鳍模型在巡游和转弯过程中的受力情况I57等。 上述工作基本都是围绕BC℉推进模式的鱼类或仿鱼机器人展开的数值研究,对柔 性鳍波动推进的数值分析工作开展的较少,主要集中在以下几个研究单位: 美国西北大学多年来一直致力于对刀鱼的感知功能和推进机制的研究,较新的研究 成果是采用CD方法对刀鱼的机动性能和推进性能进行水动力学研究,将刀鱼的细长 带状背鳍的运动理想化为正弦行波(见图1-4,研究推进力与波长、频率、波幅、鳍长 等参数之间的关系,并揭示了推进力产生的首要因素是中心射流和周围辅助涡环的形成 [5。在利用数值计算软件进行数值模拟的同时,西北大学为了能更真实的模拟刀鱼游 动的特点,提出可完全解决刚体、变形体在流体中运动的数值算法,通过机体的变形数 据,算法可同时获得游动速度、水动力参数及周围流场的分布特征等,解决了目前已有 算法中游动速度需要预先指定才能计算水动力参数的局限性【),实现了鱼类推进数值 5
绪论 波测量与动量间的关系进行了研究,在一定程度上定性或定量的解释一些现象,且得到 许多有价值的结论,但距离问题的彻底解决还存在较大差距m】。从工程应用角度来说, 这些理论方法所建立的流体力学模型过于繁琐,计算量偏大,很难有效适用于实际的工 程设计应用中。 1.2.2数值模型研究现状 近年来,随着计算机技术和复杂流体计算方法的发展,数值计算方法已成为分析鱼 类游动机理和设计仿鱼水下推进器的重要手段之一。计算流体力学(Comp喇ional Fluid Dyn卸1jcs,CFD)方法基本原理是通过数值求解表征流体流动的微分方程,得出流体流动 的流场在连续区域上的离散分布,从而近似模拟流体流动情况,CFD已经在研究领域 以及工业领域得到广泛应用,其网格生成技术和微分方程求解算法已趋于成熟,稳定性 已得到广泛的验证。 近年来采用CFD方法对鱼类游动及多种仿鱼机器人进行数值模拟的研究单位有很 多。典型的例子有:在鱼类游动研究方面,zhu(2002)及Ram锄uni(1992.2002)等分别 对金枪鱼的游动特征做了大量的二维与三维数值模拟工作【4刀;夏(2005)采用有限体积 法和动网格技术,模拟了鱼类的波状摆动推进f531;Kem(2006)对鳗鲡波状运动进行了 CFD优化分析,给出尾迹三维涡环结构等【541。在仿鱼机器人研究方面,SiIl曲(2004)等 基于CFD仿真参数进行了仿胸鳍推进的仿生AUV的控制设计‘551;Sark川2005)通过数 值模拟考察了翼型各种参数(平均攻角、摆动幅度、频率和位置等)对推力大小产生的影 响,为基于摆动尾鳍推进的仿生机器鱼(如鲔科模式、箱纯科模式)的设计提供理论依据 嗣;Takaslli(2006)分析了波动鳍模型在巡游和转弯过程中的受力情况【57】等。 上述工作基本都是围绕BCF推进模式的鱼类或仿鱼机器人展开的数值研究,对柔 性鳍波动推进的数值分析工作开展的较少,主要集中在以下几个研究单位: 美国西北大学多年来一直致力于对刀鱼的感知功能和推进机制的研究,较新的研究 成果是采用CFD方法对刀鱼的机动性能和推进性能进行水动力学研究,将刀鱼的细长 带状背鳍的运动理想化为正弦行波(见图1.4a),研究推进力与波长、频率、波幅、鳍长 等参数之间的关系,并揭示了推进力产生的首要因素是中心射流和周围辅助涡环的形成 【5引。在利用数值计算软件进行数值模拟的同时,西北大学为了能更真实的模拟刀鱼游 动的特点,提出可完全解决刚体、变形体在流体中运动的数值算法,通过机体的变形数 据,算法可同时获得游动速度、水动力参数及周围流场的分布特征等,解决了目前已有 算法中游动速度需要预先指定才能计算水动力参数的局限性唧】,实现了鱼类推进数值 5