三、GPS的组成 回声林大学 3.用户设备部分 GPS的空间部分和地面监控部分,是用户应用该系统进行 定位的基础,用户只有利用用户设备,才能实现应用GPS定位 的目的。 根据GPS用户的不同要求,所需的接收设备各异,但其主 要任务是接收卫星发射的信息。 用户设备主要由GPS接收机硬件和数据处理软件,以及微 处理机和终端设备组成;而GPS接收机的硬件,一般包括主机、 天线和电源,主要功能是接收GPS卫星发射的信号,以获得必 要的导航和定位信息及观测量,并经简单数据处理而实现实时 导航和定位;GPS软件部分是指各种后处理软件包,其主要作 用是对观测数据进行精加工,以便获得精密定位结果。 根据GPS用户的要求不同,GPS接收机也有许多不同的类 型,一般可分为导航型、测量型和授时型
三、GPS的组成 3.用户设备部分 GPS的空间部分和地面监控部分,是用户应用该系统进行 定位的基础,用户只有利用用户设备,才能实现应用GPS定位 的目的。 根据GPS用户的不同要求,所需的接收设备各异,但其主 要任务是接收卫星发射的信息。 用户设备主要由GPS接收机硬件和数据处理软件,以及微 处理机和终端设备组成;而GPS接收机的硬件,一般包括主机、 天线和电源,主要功能是接收GPS卫星发射的信号,以获得必 要的导航和定位信息及观测量,并经简单数据处理而实现实时 导航和定位;GPS软件部分是指各种后处理软件包,其主要作 用是对观测数据进行精加工,以便获得精密定位结果。 根据GPS用户的要求不同,GPS接收机也有许多不同的类 型,一般可分为导航型、测量型和授时型
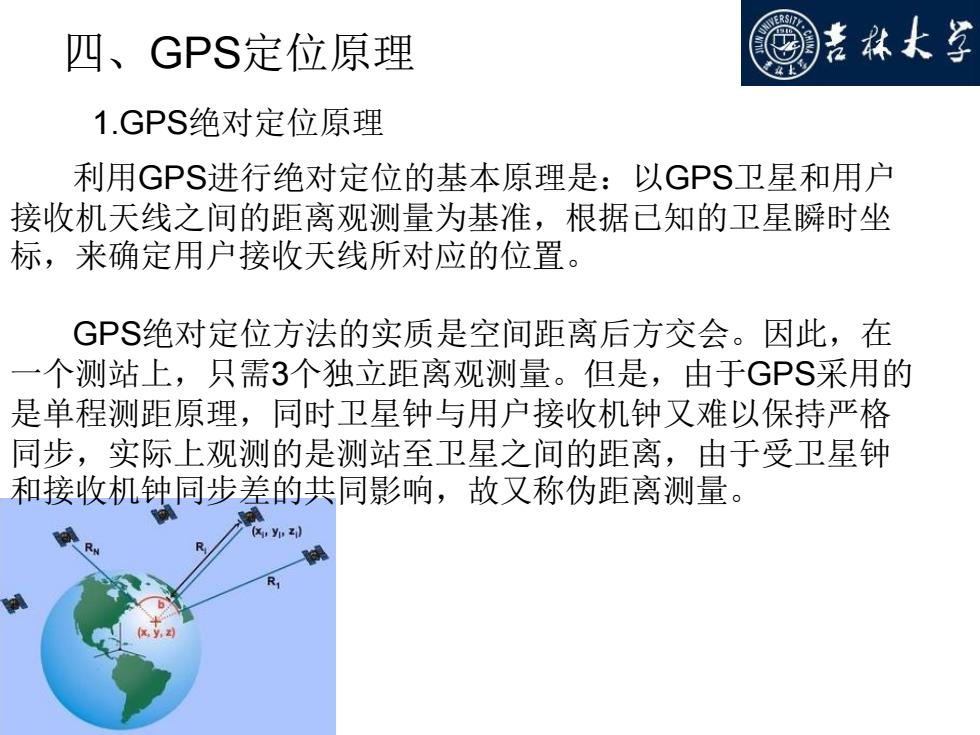
四、GPS定位原理 法林大学 1.GPS绝对定位原理 利用GPS进行绝对定位的基本原理是:以GPS卫星和用户 接收机天线之间的距离观测量为基准,根据已知的卫星瞬时坐 标,来确定用户接收天线所对应的位置。 GPS绝对定位方法的实质是空间距离后方交会。因此,在 一个测站上,只需3个独立距离观测量。但是,由于GPS采用的 是单程测距原理,同时卫星钟与用户接收机钟又难以保持严格 同步,实际上观测的是测站至卫星之间的距离,由于受卫星钟 和接收机钟同步差的共同影响,故又称伪距离测量。 ,y,z
四、GPS定位原理 1.GPS绝对定位原理 利用GPS进行绝对定位的基本原理是:以GPS卫星和用户 接收机天线之间的距离观测量为基准,根据已知的卫星瞬时坐 标,来确定用户接收天线所对应的位置。 GPS绝对定位方法的实质是空间距离后方交会。因此,在 一个测站上,只需3个独立距离观测量。但是,由于GPS采用的 是单程测距原理,同时卫星钟与用户接收机钟又难以保持严格 同步,实际上观测的是测站至卫星之间的距离,由于受卫星钟 和接收机钟同步差的共同影响,故又称伪距离测量
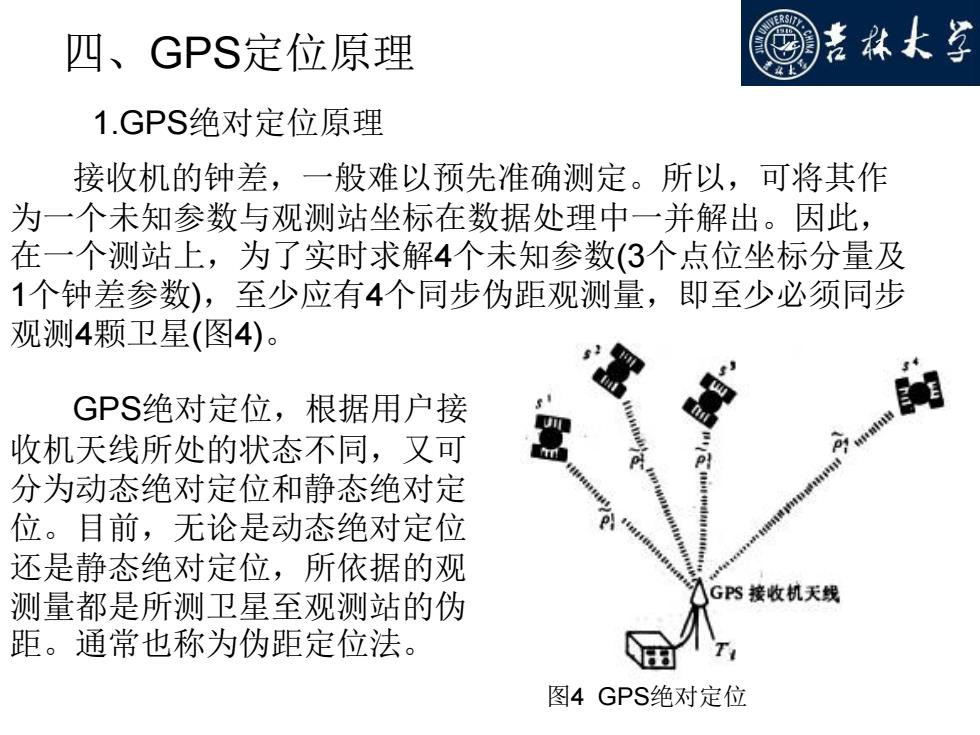
四、GPS定位原理 吉林大学 1.GPS绝对定位原理 接收机的钟差,一般难以预先准确测定。所以,可将其作 为一个未知参数与观测站坐标在数据处理中一并解出。因此, 在一个测站上,为了实时求解4个未知参数(3个点位坐标分量及 1个钟差参数),至少应有4个同步伪距观测量,即至少必须同步 观测4颗卫星(图4)。 GPS绝对定位,根据用户接 收机天线所处的状态不同,又可 分为动态绝对定位和静态绝对定 位。目前,无论是动态绝对定位 还是静态绝对定位,所依据的观 测量都是所测卫星至观测站的伪 GPS接收机天线 距。通常也称为伪距定位法。 T 图4GPS绝对定位
四、GPS定位原理 1.GPS绝对定位原理 接收机的钟差,一般难以预先准确测定。所以,可将其作 为一个未知参数与观测站坐标在数据处理中一并解出。因此, 在一个测站上,为了实时求解4个未知参数(3个点位坐标分量及 1个钟差参数),至少应有4个同步伪距观测量,即至少必须同步 观测4颗卫星(图4)。 图4 GPS绝对定位 GPS绝对定位,根据用户接 收机天线所处的状态不同,又可 分为动态绝对定位和静态绝对定 位。目前,无论是动态绝对定位 还是静态绝对定位,所依据的观 测量都是所测卫星至观测站的伪 距。通常也称为伪距定位法
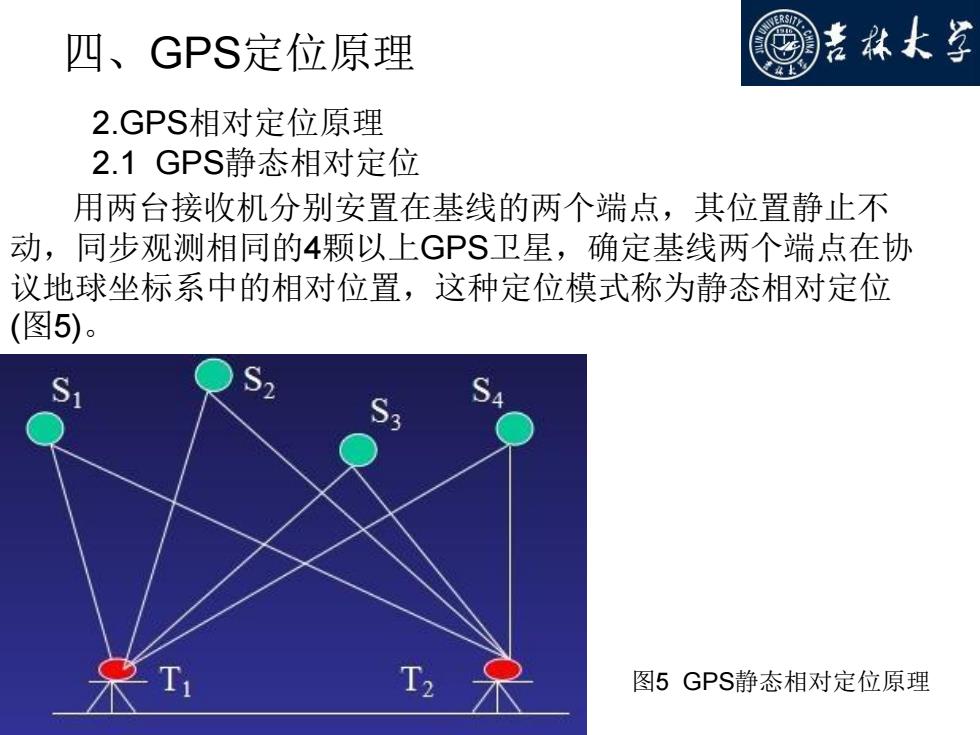
四、GPS定位原理 @声林大学 2.GPS相对定位原理 2.1GPS静态相对定位 用两台接收机分别安置在基线的两个端点,其位置静止不 动,同步观测相同的4颗以上GPS卫星,确定基线两个端点在协 议地球坐标系中的相对位置,这种定位模式称为静态相对定位 (图5)。 不T T2 图5GPS静态相对定位原理
四、GPS定位原理 2.GPS相对定位原理 2.1 GPS静态相对定位 用两台接收机分别安置在基线的两个端点,其位置静止不 动,同步观测相同的4颗以上GPS卫星,确定基线两个端点在协 议地球坐标系中的相对位置,这种定位模式称为静态相对定位 (图5)。 图5 GPS静态相对定位原理
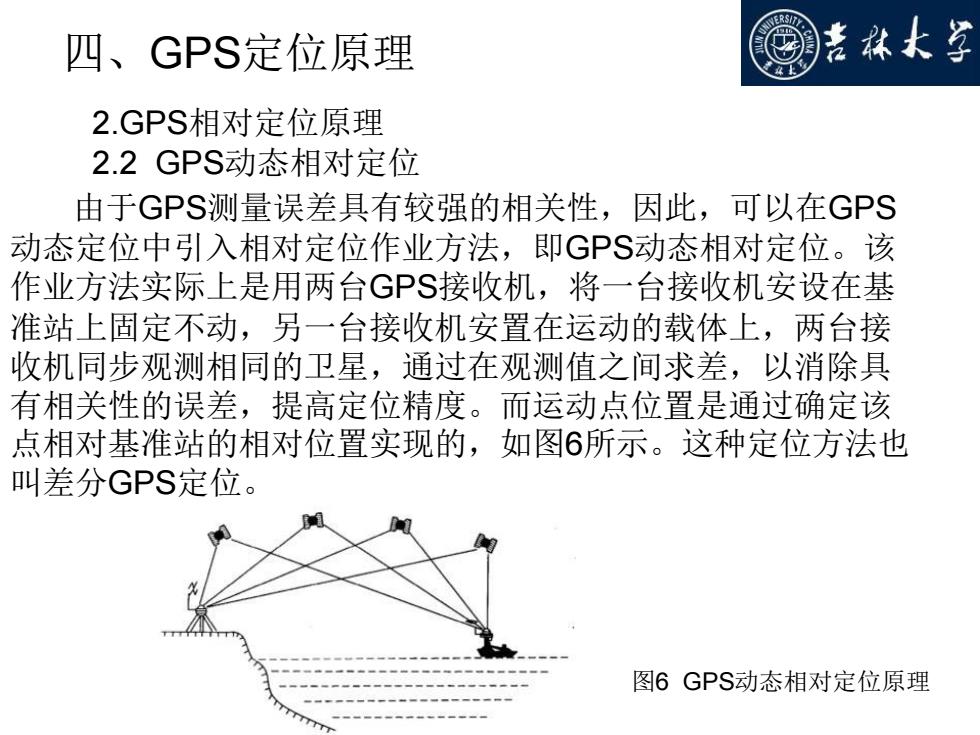
四、GPS定位原理 吉林大学 2.GPS相对定位原理 2.2GPS动态相对定位 由于GPS测量误差具有较强的相关性,因此,可以在GPS 动态定位中引入相对定位作业方法,即GPS动态相对定位。该 作业方法实际上是用两台GPS接收机,将一台接收机安设在基 准站上固定不动,另一台接收机安置在运动的载体上,两台接 收机同步观测相同的卫星,通过在观测值之间求差,以消除具 有相关性的误差,提高定位精度。而运动点位置是通过确定该 点相对基准站的相对位置实现的,如图6所示。这种定位方法也 叫差分GPS定位。 图6GPS动态相对定位原理
四、GPS定位原理 2.GPS相对定位原理 2.2 GPS动态相对定位 由于GPS测量误差具有较强的相关性,因此,可以在GPS 动态定位中引入相对定位作业方法,即GPS动态相对定位。该 作业方法实际上是用两台GPS接收机,将一台接收机安设在基 准站上固定不动,另一台接收机安置在运动的载体上,两台接 收机同步观测相同的卫星,通过在观测值之间求差,以消除具 有相关性的误差,提高定位精度。而运动点位置是通过确定该 点相对基准站的相对位置实现的,如图6所示。这种定位方法也 叫差分GPS定位。 图6 GPS动态相对定位原理