超磁仿生机器鱼力学机理及数值模拟 1.2.4鱼类游动的数值模拟 人们]利用数值方法,对流体和变形固体的耦合方程求解,对鱼类的游动问题作了很 多的数值模拟计算。Carling等人s训建立了一个鳗鱼的二维计算模型,通过数值方法对 N-S方程和牛顿运动定律的求解得到鳗鱼自主游动的数值结果。Eldredge等人5对一个 三杆铰接系统利用数值模拟其在中等雷诺数下的波状游动,并专门研究了游动过程在身 体表面产生的涡脱落到水中的扩散和传播过程。Akhtar等人5别通过数值方法模拟从一个 拍动翼的脱落的尾涡对其下游的另一个拍动翼所产生的影响,来模拟鱼鳍的水动力学机 理。Verhagen等人s4建立了一个锦鲤鱼幼体的概念模型,通过数值模拟其在中等雷诺数 下的C型快速启动的水动力学过程。Km等人5利用三维的数值方法模拟了鳗鱼的自 主游动,并分析了鳗鱼游动产生的尾涡结构。Kawachi等人S数值模拟了鱼的波状游动 的水动力学问题。Leroyer等人5通过数值方法模拟了一个鱼状体的自主推进过程。 Martin等人[s8对流体的N-S方程耦合了固体的牛顿定律后的初边值问题做数值求解,来 模拟一个类鱼的游动问题。Wolfgang等人[s9利用三维计算方法对蓝鳍金枪鱼模型的非 稳态游动进行了数值模拟,并将计算结果与机器金枪鱼的水动力学实验数据进行了对 比。 1.3仿生鱼的研究现状 从工程的角度来看,生物体的功能形态学为高科技创新提供一个永久性的灵感来 源。在这种背景下,已经出现和发展的一个新的分支,即仿生学,结合了生物学、数学、 和工程学等诸多学科。它利用来自大自然的灵感,以生物直觉和工程实用性达到现代技 术创新的要求。这其中,像仿生鱼就是一个鲜明的例子。 1.3.1鱼体肌电测量技术 鱼的神经系统控制肌肉纤维的收缩,其结果可通过鱼体肌电图来显示。而作为附在 鱼类身体骨骼上的肌肉是鱼类的高速、灵活游动力量来源,且鱼的尾柄是鱼类肌肉集中 的部位,也就是控制鱼类向前游动的主要部位。因此,对鱼肌肉的研究对设计仿生鱼尤 为重要,对肌电图的测量以得到鱼神经的控制结果,可通过构造类似的曲线来模拟鱼的 神经系统控制机器鱼的运动。 肌电测量技术是研究肌肉工作特征的重要手段,它是通过植入体内的电极获取神经 肌肉活动时的生物电并通过信号放大、滤波等一系列措施而得到的生物体的肌电图 (Electromyogram,EMG),能够反映神经肌肉的活动状态I6o。Jayne、Lauder(I994)测量 了蓝鳃太阳鱼在稳态游动,快速启动和滑翔游动这三种运动方式下红肌和白肌对应的肌 -8 万方数据
超磁仿生机器鱼力学机理及数值模拟 1.2.4鱼类游动的数值模拟 人们利用数值方法,对流体和变形固体的耦合方程求解,对鱼类的游动问题作了很 多的数值模拟计算。Carling等人1511建立了一个鳗鱼的二维计算模型,通过数值方法对 N.S方程和牛顿运动定律的求解得到鳗鱼自主游动的数值结果。Eldredge等人1521对一个 三杆铰接系统利用数值模拟其在中等雷诺数下的波状游动,并专门研究了游动过程在身 体表面产生的涡脱落到水中的扩散和传播过程。Akhtar等人【53J通过数值方法模拟从一个 拍动翼的脱落的尾涡对其下游的另一个拍动翼所产生的影响,来模拟鱼鳍的水动力学机 理。Verhagen等人【54J建立了一个锦鲤鱼幼体的概念模型,通过数值模拟其在中等雷诺数 下的c型快速启动的水动力学过程。Kern等人【5 5】利用三维的数值方法模拟了鳗鱼的自 主游动,并分析了鳗鱼游动产生的尾涡结构。Kawachi等人156J数值模拟了鱼的波状游动 的水动力学问题。Leroyer等人15”通过数值方法模拟了一个鱼状体的自主推进过程。 Martin等人【5 81对流体的N.S方程耦合了固体的牛顿定律后的初边值问题做数值求解,来 模拟一个类鱼的游动问题。Wolfgang等人【59】利用三维计算方法对蓝鳍金枪鱼模型的非 稳态游动进行了数值模拟,并将计算结果与机器金枪鱼的水动力学实验数据进行了对 比。 1。3仿生鱼的研究现状 从工程的角度来看,生物体的功能形态学为高科技创新提供一个永久性的灵感来 源。在这种背景下,已经出现和发展的一个新的分支,即仿生学,结合了生物学、数学、 和工程学等诸多学科。它利用来自大自然的灵感,以生物直觉和工程实用性达到现代技 术创新的要求。这其中,像仿生鱼就是一个鲜明的例子。 1.3.1 鱼体肌电测量技术 鱼的神经系统控制肌肉纤维的收缩,其结果可通过鱼体肌电图来显示。而作为附在 鱼类身体骨骼上的肌肉是鱼类的高速、灵活游动力量来源,且鱼的尾柄是鱼类肌肉集中 的部位,也就是控制鱼类向前游动的主要部位。因此,对鱼肌肉的研究对设计仿生鱼尤 为重要,对肌电图的测量以得到鱼神经的控制结果,可通过构造类似的曲线来模拟鱼的 神经系统控制机器鱼的运动。 肌电测量技术是研究肌肉工作特征的重要手段,它是通过植入体内的电极获取神经 肌肉活动时的生物电并通过信号放大、滤波等一系列措施而得到的生物体的肌电图 (Electromyogram,EMG),能够反映神经肌肉的活动状态【删。Jayne、Lauder(1994)澳1]量 了蓝鳃太阳鱼在稳态游动,快速启动和滑翔游动这三种运动方式下红肌和白肌对应的肌 一8一 万方数据
大连理工大学博士学位论文 电图的强度和持续时间61。Shadwick(I998)研究了鱼稳态游动时的肌肉动力学,讨论了 肌肉动力学的参数与鱼体运动学之间的关系62。Jayne、Lauder(1995)分析了大嘴鲈鱼的 身体中脊线运动学参数并获得大嘴鲈鱼在儿种游速下的稳态游动时位于表皮下面的红 肌在不同纵向位置处的肌电图6)。Jayne、Lauder(I993)定量测量了蓝鳃太阳鱼从停顿状 态和稳态游动状态被诱使其反应出逃避的过程中的身体中脊线的运动学参数,并同步测 量了鱼体两侧的红肌和白肌的肌电图41,分析了不同类型的肌肉纤维、体长的不同位置 以及停顿和稳态游动状态,它们之间的运动学参数与肌电图参数是否有明显的区别。 1.3.2新型智能材料驱动器 在采用传统驱动器研制的水下机器人中,虽然有些机器人具有非常好的表现,但是 它们的尺寸非常大,因为它们需要携带驱动器的各种装置,或者其它附加部件,来到达 特殊的要求。面智能材料驱动器,从另一方面来说,由于它们拥有执行灵活和复杂运动 的能力,这使得它们在生物学机制上具有优势,有些类似于生物肌肉,故而成为一种很 好的替代驱动器。 智能材料能够用来制成一种不需要其它附加部件就能轻松地实现灵活和复杂运动 的驱动器6。这样,用这种智能材料驱动器制造出来的机器人,相比那些用电机和活塞 作为驱动器的机器人6阿,质量轻而体积微小,另外,智能材料驱动器工作时能够实现低 噪音。近年来,用于研究和制造仿生水下机器人驱动器的智能材料主要有压电体(PZT)、 形状记忆合金(SMA)、离子聚合物(IPMC)和超磁致伸缩材料(GMM)等新型材料。 其中,压电体(Piezoelectric Transducer,PZT)在两面受压力后,能够产生与压力成 比例的电场:相反,在外加电场下,它的形状也会发生改变6)。美国加州大学伯克利分 校的Deng和Avadhanula等人[68l研制了一种用压电体驱动的微型机器鱼,可以模仿箱鲀 鱼的游动。韩国建国大学的Ho等人[6用轻质量的压电驱动器研制了一个仿生机器鱼, 以模仿鱼尾鳍的运动。Nguyen等人ol研制了一种用轻质量的单层压电陶瓷驱动器所驱动 的机器鱼。由美国俄亥俄州立大学的Matt Borgen、Washington等7研制的一种微型水下 推进器,利用压电体作为驱动器。Nishikawa等人[四用压电体研究了一种能在管道里运 动的无线微型推进系统。Tuncdemir等人I7研究的一种游动微型机器鱼利用的压电体作 为驱动器。虽然压电晶品体式微小型驱动器具有很多独特的优点,但是这样的驱动器需有 缆供能,因而限制了它的应用领域。 形状记忆合金(Shape Memory Alloy,SMA)具有热-机械特征是因为材料里的相变, 这是与温度和材料内部应力以及在一定条件下发生的形状记忆效应(SME)有关的7。 Wilbur等人I7在2002年用SMA研制了一个类七鳃鳗鱼的机器鱼,可作波状式的游动。美 -9- 万方数据
大连理工大学博士学位论文 电图的强度和持续时间【6¨。Shadwick(1998)研究了鱼稳态游动时的肌肉动力学,讨论了 肌肉动力学的参数与鱼体运动学之间的关系【62l。Jayne、Lauder(1995)分析了大嘴鲈鱼的 身体中脊线运动学参数并获得大嘴鲈鱼在几种游速下的稳态游动时位于表皮下面的红 肌在不同纵向位置处的肌电图1631。Jayne、Lauder(1993)定量测量了蓝鳃太阳鱼从停顿状 态和稳态游动状态被诱使其反应出逃避的过程中的身体中脊线的运动学参数,并同步测 量了鱼体两侧的红肌和白肌的肌电图岬J,分析了不同类型的肌肉纤维、体长的不同位置 以及停顿和稳态游动状态,它们之间的运动学参数与肌电图参数是否有明显的区别。 1.3.2新型智能材料驱动器 在采用传统驱动器研制的水下机器人中,虽然有些机器人具有非常好的表现,但是 它们的尺寸非常大,因为它们需要携带驱动器的各种装置,或者其它附加部件,来到达 特殊的要求。而智能材料驱动器,从另一方面来说,由于它们拥有执行灵活和复杂运动 的能力,这使得它们在生物学机制上具有优势,有些类似于生物肌肉,故而成为一种很 好的替代驱动器。 智能材料能够用来制成一种不需要其它附加部件就能轻松地实现灵活和复杂运动 的驱动器【651。这样,用这种智能材料驱动器制造出来的机器人,相比那些用电机和活塞 作为驱动器的机器人惭1,质量轻而体积微小,另外,智能材料驱动器工作时能够实现低 噪音。近年来,用于研究和制造仿生水下机器人驱动器的智能材料主要有压电体(PZT)、 形状记忆合金(SMA)、离子聚合物(IPMC)和超磁致伸缩材料(GMM)等新型材料。 其中,压电体(Piezoelectric Transducer,PZT)在两面受压力后,能够产生与压力成 比例的电场;相反,在外加电场下,它的形状也会发生改变16¨。美国加州大学伯克利分 校的Deng和Avadhanula等人【68】研制了一种用压电体驱动的微型机器鱼,可以模仿箱纯 鱼的游动。韩国建国大学的Heo等人16圳用轻质量的压电驱动器研制了一个仿生机器鱼, 以模仿鱼尾鳍的运动。Nguyen等人【7UJ研制了一种用轻质量的单层压电陶瓷驱动器所驱动 的机器鱼。由美国俄亥俄州立大学的Matt Borgen、Washington等t 71 J研制的一种微型水下 推进器,利用压电体作为驱动器。Nishikawa等人172j用压电体研究了一种能在管道里运 动的无线微型推进系统。Tuncdemir等人【73J研究的一种游动微型机器鱼利用的压电体作 为驱动器。虽然压电晶体式微小型驱动器具有很多独特的优点,但是这样的驱动器需有 缆供能,因而限制了它的应用领域。 形状记忆合金(Shape Memory Alloy,SMA)具有热.机械特征是因为材料里的相变, 这是与温度和材料内部应力以及在一定条件下发生的形状记忆效应(SME)有关的【74】。 wilbur等人【75j在2002年用SMA研制了一个类七鳃鳗鱼的机器鱼,可作波状式的游动。美 万方数据
超磁仿生机器鱼力学机理及数值模拟 国华盛顿大学的To等人【7用SMA研制了一个尾柄驱动器,用来驱动仿金枪鱼游动的机 器鱼。LOw等人7利用SMA研制了一个鳗鱼状机器人,用来探究鱼类的波动游动。这种 微小型驱动器在多种游动模式下都表现出较好的游动速度,且具有生物相容性好的优点 78。 离子聚合物金属复合材料Ionic Polymer Metal Composite,PMC)是一种在外加电场 激励下,其化学结构会发生变化从而产生机械变形的一种聚合物。基于这种现象,它可 以用来制作驱动器,灵活、可重复使用、变形位移大和响应快速是这种驱动器阿的特点。 美国纽约大学的Aureli等人I80用IPMC研制了一个自由游动的水下机器鱼,以模仿一般的 以尾鳍推进的鱼类游动。 超磁致伸缩材料(Giant Magnetostrictive Material,.GMM)是一种在外磁场作用下会 产生变形的新型功能材料8I。Fukuda等人I8用GMM研制了一个可以无缆驱动的微小型 机器人。张永顺等人根据仿生学原理,利用该材料制作了模仿鱼尾鳍的驱动器,以研 究鱼的游动机理。大连理工大学的王惠颖利用超磁致伸缩薄膜研制的泳动型机器人具 有良好的游动性能。孙发明85和杨超86等对用这种材料驱动的仿生机器鱼进行了数值模 拟。所有这些用智能材料制作的驱动器,一般都是通过施加特定的激励信号如电流、电 压或磁场等,促使这些材料产生一定的物理变形,从而推动微小型机器鱼在水下灵活游 动87刃。 1.3.4仿生机器鱼研究概况 在海洋工程中,比如像海底缆线、海底管道、天然气钻探以及环保等方面,需要研 究人员为此开发新的工具,这促进了机器鱼的研究。对于水下机器人,一个关键的问题 是需要它们在有限制的工作环境下,对已经预设的操作做出适当的运动。 很多研究者在基于仿生学的设计和分析的基础上,利用各种新型驱动器设计制造了 各种不同的水下机器人。Crespi等人8别研制了一种新型机器鱼,可通过姿态生成器对非 线性摆动装置进行控制,从而使其做出有节律性的游动运动。Brenden等人[89研制的一 种柔顺仿生机器鱼,以模仿鰺鱼的游动模式。Masaaki等人[9研制了一种鳐鱼游动模式 的机器鱼,具有一个中央浮动器和两边各一个的胸鳍,能够利用胸鳍的摆动进行类鳐鱼 式的游动。Ki等人9研制了-一种使用各向异性材料作鱼鳍,能作弯扭耦合变形的智能 柔性结构的机器鱼,可模仿类海龟的游动运动。Stefanini等人l研制了一个类七鳃鳗鱼 的机器人,研究了它的仿生驱动机制。英国埃塞克斯大学的Lu等人采用新型机电一 体化的设计研制一个三维游动的机器鱼。Kamamichi等人94研究了一种由三段组成机器 鱼,来模仿蛇形游动。维吉尼亚大学的Chen等人I]研究的机器鱼利用IPMC模拟鱼的 -10- 万方数据
超磁仿生机器鱼力学机理及数值模拟 国华盛顿大学的Tao等人【761用SMA研制了一个尾柄驱动器,用来驱动仿金枪鱼游动的机 器鱼。Low等人【77】利用SMA研制了一个鳗鱼状机器人,用来探究鱼类的波动游动。这种 微小型驱动器在多种游动模式下都表现出较好的游动速度,且具有生物相容性好的优点 【78】 O 离子聚合物金属复合材料(Ionic Polymer Metal Composite,IPMC)是一种在外加电场 激励下,其化学结构会发生变化从而产生机械变形的~种聚合物。基于这种现象,它可 以用来制作驱动器,灵活、可重复使用、变形位移大和响应快速是这种驱动器【79/的特点。 美国纽约大学的Aureli等人180J用IPMC研制了一个自由游动的水下机器鱼,以模仿一般的 以尾鳍推进的鱼类游动。 超磁致伸缩材料(Giant Magnetostrictive Material,GMM)是一种在外磁场作用下会 产生变形的新型功能材料‘8¨。Fukuda等人【821用GMM研制了一个可以无缆驱动的微小型 机器人。张永顺等人183J根据仿生学原理,利用该材料制作了模仿鱼尾鳍的驱动器,以研 究鱼的游动机理。大连理工大学的王惠颖【84J利用超磁致伸缩薄膜研制的泳动型机器人具 有良好的游动性能。孙发明【85】和杨超【86】等对用这种材料驱动的仿生机器鱼进行了数值模 拟。所有这些用智能材料制作的驱动器,一般都是通过施加特定的激励信号如电流、电 压或磁场等,促使这些材料产生一定的物理变形,从而推动微小型机器鱼在水下灵活游 动【871。 1.3.4仿生机器鱼研究概况 在海洋工程中,比如像海底缆线、海底管道、天然气钻探以及环保等方面,需要研 究人员为此开发新的工具,这促进了机器鱼的研究。对于水下机器人,一个关键的问题 是需要它们在有限制的工作环境下,对已经预设的操作做出适当的运动。 很多研究者在基于仿生学的设计和分析的基础上,利用各种新型驱动器设计制造了 各种不同的水下机器人。Crespi等人【88】研制了一种新型机器鱼,可通过姿态生成器对非 线性摆动装置进行控制,从而使其做出有节律性的游动运动。Brenden等人№9J研制的一 种柔顺仿生机器鱼,以模仿鳢鱼的游动模式。Masaaki等人【90】研制了一种鳐鱼游动模式 的机器鱼,具有一个中央浮动器和两边各一个的胸鳍,能够利用胸鳍的摆动进行类鳐鱼 式的游动。Kim等人【91】研制了一种使用各向异性材料作鱼鳍,能作弯扭耦合变形的智能 柔性结构的机器鱼,可模仿类海龟的游动运动。Stefanini等人[92】研制了一个类七鳃鳗鱼 的机器人,研究了它的仿生驱动机制。英国埃塞克斯大学的Liu等人【93】采用新型机电一 体化的设计研制一个三维游动的机器鱼。Kamamichi等人【941研究了一种由三段组成机器 鱼,来模仿蛇形游动。维吉尼亚大学的Chen等人【95】研究的机器鱼利用IPMC模拟鱼的 万方数据
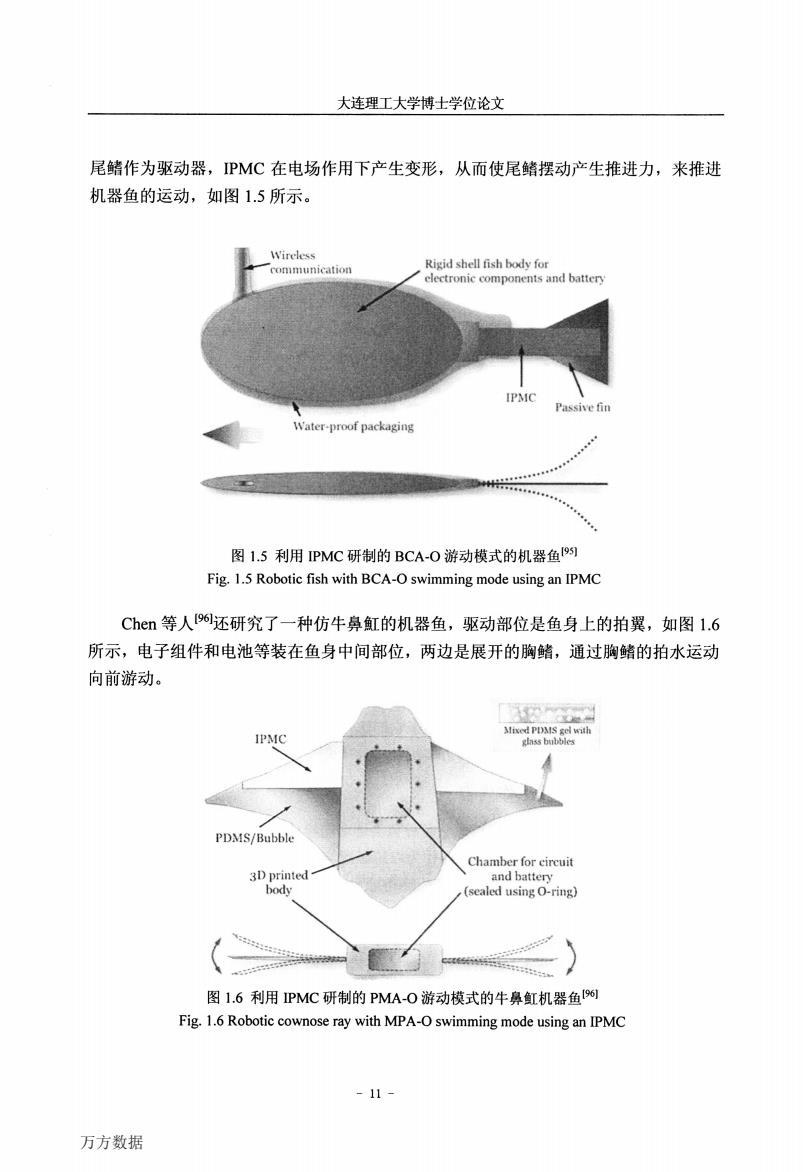
大连理工大学博士学位论文 尾鳍作为驱动器,PMC在电场作用下产生变形,从而使尾鳍摆动产生推进力,来推进 机器鱼的运动,如图1.5所示。 Wireless communication Rigid shell fish body for electronic components and battery IPMC Passive fin Water-proof packaging 图1.5利用PMC研制的BCA-O游动模式的机器鱼91 Fig.1.5 Robotic fish with BCA-O swimming mode using an IPMC Chen等人o还研究了一种仿牛鼻魟的机器鱼,驱动部位是鱼身上的拍翼,如图l.6 所示,电子组件和电池等装在鱼身中间部位,两边是展开的胸鳍,通过胸鳍的拍水运动 向前游动。 Mixed PDMS gel with IPMC glass bubbles PDMS/Bubble Chamber for circuit 3D printed and battery body (sealed using O-ring) 图1.6利用PMC研制的PMA-O游动模式的牛鼻虹机器鱼% Fig.1.6 Robotic cownose ray with MPA-O swimming mode using an IPMC -11- 万方数据
大连理工大学博士学位论文 尾鳍作为驱动器,IPMC在电场作用下产生变形,从而使尾鳍摆动产生推进力,来推进 机器鱼的运动,如图1.5所示。 卅曦 、、‘dk卜Ⅲ’l"‘m沌咖8 ... /。 ●●●●● 图1.5利用IPMC研制的BCA.O游动模式的机器鱼【951 Fig.1.5 Robotic fish with BCA—O swimming mode using an IPMC Chen等人‘961还研究了一种仿牛鼻缸的机器鱼,驱动部位是鱼身上的拍翼,如图1.6 所示,电子组件和电池等装在鱼身中间部位,两边是展开的胸鳍,通过胸鳍的拍水运动 向前游动。 。一;11iM∑C r,‘”—陵_、、? 鬈‰/~‘攀羹雾 爨纛:j PDMS/Bubble 一霪 3。1)rimed多 名i◆兰 。‘ ,。一::,8“一“”鼍蘑冀I蠢餐黧 。鎏蓑i?’”—8一一;‰::::.i■一 图1.6利用IPMC研制的PMA—O游动模式的牛鼻虹机器鱼【961 Fig.1.6 Robotic cownose ray with MPA—O swimming mode using an IPMC 万方数据
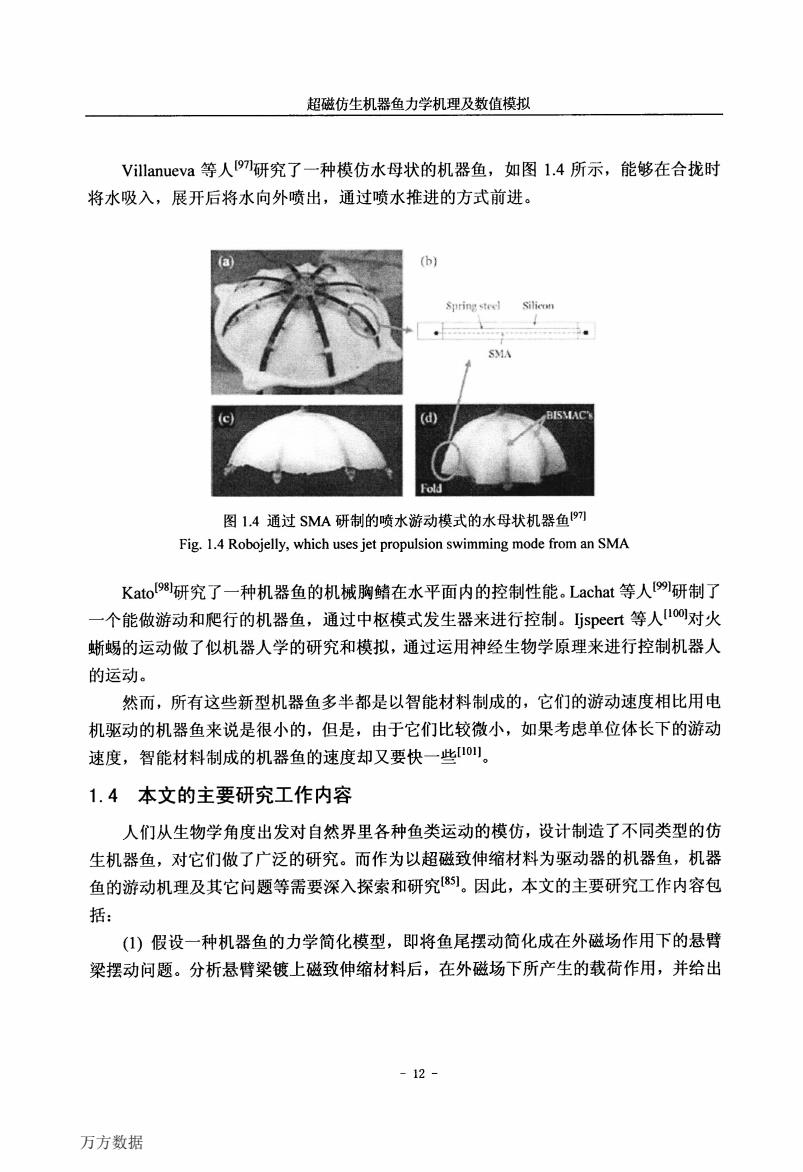
超磁仿生机器鱼力学机理及数值模拟 Villanueva等人研究了一种模仿水母状的机器鱼,如图1.4所示,能够在合拢时 将水吸入,展开后将水向外喷出,通过喷水推进的方式前进。 (b) Spring steel Silicon SMA d Fold 图1.4通过SMA研制的喷水游动模式的水母状机器鱼7 Fig.1.4 Robojelly,which uses jet propulsion swimming mode from an SMA Kato8研究了一种机器鱼的机械胸鳍在水平面内的控制性能。Lachat等人[研制了 一个能做游动和爬行的机器鱼,通过中枢模式发生器来进行控制。ljspeert等人uoo对火 蜥蜴的运动做了似机器人学的研究和模拟,通过运用神经生物学原理来进行控制机器人 的运动。 然而,所有这些新型机器鱼多半都是以智能材料制成的,它们的游动速度相比用电 机驱动的机器鱼来说是很小的,但是,由于它们比较微小,如果考虑单位体长下的游动 速度,智能材料制成的机器鱼的速度却又要快一些10叫。 1.4本文的主要研究工作内容 人们从生物学角度出发对自然界里各种鱼类运动的模仿,设计制造了不同类型的仿 生机器鱼,对它们做了广泛的研究。而作为以超磁致伸缩材料为驱动器的机器鱼,机器 鱼的游动机理及其它问题等需要深入探索和研究)。因此,本文的主要研究工作内容包 括: (1)假设一种机器鱼的力学简化模型,即将鱼尾摆动简化成在外磁场作用下的悬臂 梁摆动问题。分析悬臂梁镀上磁致伸缩材料后,在外磁场下所产生的载荷作用,并给出 -12- 万方数据
超磁仿生机器鱼力学机理及数值模拟 Villanueva等人吲研究了一种模仿水母状的机器鱼,如图1.4所示,能够在合拢时 将水吸入,展开后将水向外喷出,通过喷水推进的方式前进。 图1.4通过SMA研制的喷水游动模式的水母状机器鱼1971 Fig.1.4 Robojelly,which uses jet propulsion swimming mode from an SMA Kato[981研究了一种机器鱼的机械胸鳍在水平面内的控制性能。Lachat等人阴l研制了 一个能做游动和爬行的机器鱼,通过中枢模式发生器来进行控制。Ijspeert等人DOOl对火 蜥蜴的运动做了似机器人学的研究和模拟,通过运用神经生物学原理来进行控制机器人 的运动。 然而,所有这些新型机器鱼多半都是以智能材料制成的,它们的游动速度相比用电 机驱动的机器鱼来说是很小的,但是,由于它们比较微小,如果考虑单位体长下的游动 速度,智能材料制成的机器鱼的速度却又要快一些【l01 J。 1.4本文的主要研究工作内容 人们从生物学角度出发对自然界里各种鱼类运动的模仿,设计制造了不同类型的仿 生机器鱼,对它们做了广泛的研究。而作为以超磁致伸缩材料为驱动器的机器鱼,机器 鱼的游动机理及其它问题等需要深入探索和研究【85】。因此,本文的主要研究工作内容包 括: (1)假设一种机器鱼的力学简化模型,即将鱼尾摆动简化成在外磁场作用下的悬臂 梁摆动问题。分析悬臂梁镀上磁致伸缩材料后,在外磁场下所产生的载荷作用,并给出 万方数据