五、简答题部分参考答案 10、在GPS定位中,一般用一组开普勒轨道根数来确定卫星轨道平面在天球坐标系 中的位置和方向。试绘图表示这组开普勒轨道根数,并说明各参数的意义。 答: 卫星的无摄运动,一般可通过一组适宜的参数来描述,但是,这组参数的选择并不 是唯一的:其中一组应用广泛的参数, 称为开普勒轨道参数,或称轨道根数。 as- -轨道椭圆的长半轴: 卫星 近地点 es- 一轨道椭圆的偏心率: 轨道长幸他 以上两个参数确定了开普勒椭圆 的形状和大小。 再近点商形 —升交点的赤经,即在地球 赤道平面上,升交点与春分点之间的 地心夹角:升交点即当卫星由南向北 运行时,其轨道与地球赤道面的一个 近地,点角距@ 升文赤经D 交点。 轨道凭角: —轨道面的倾角,即卫星轨道 平面与地球赤道面之间的夹角。 Q和1这两个参数,唯一地确定了卫星轨道平面与地球体之间的相对定向。 一近地点角距,即在轨道平面上升交点与近地点之间的地心夹角。这一参数表 达了开普勒椭圆在轨道平面上的定向。 一卫星的真近点角,即在轨道平面上,卫星与近地点之间的地心角角距。 该参数为时间的函数,它确定了卫星在轨道上的瞬时位置。 以上6个参数as、es、2、i、”、和V所构成的坐标系统,通常称为轨 道坐标系统,它广泛地用于描述卫星的运动。 12、当两站间的距离相距不远(≤20k)时,在接收机和卫星间求二次差有何优点? 有何缺点? 答: 对于短距离(<20km)的相对定位而言,在接收机和卫星间求二次差的优点有: 1)双差观测值中,卫星钟差的影响己基本消除: 2)双差观测值中,卫星卫星星历误差的影响己基本消除 3)双差观测值中,接收机钟差的影响已基本消除: 4)双差观测值中,对流层和电离层的影响得到了进一步的削弱
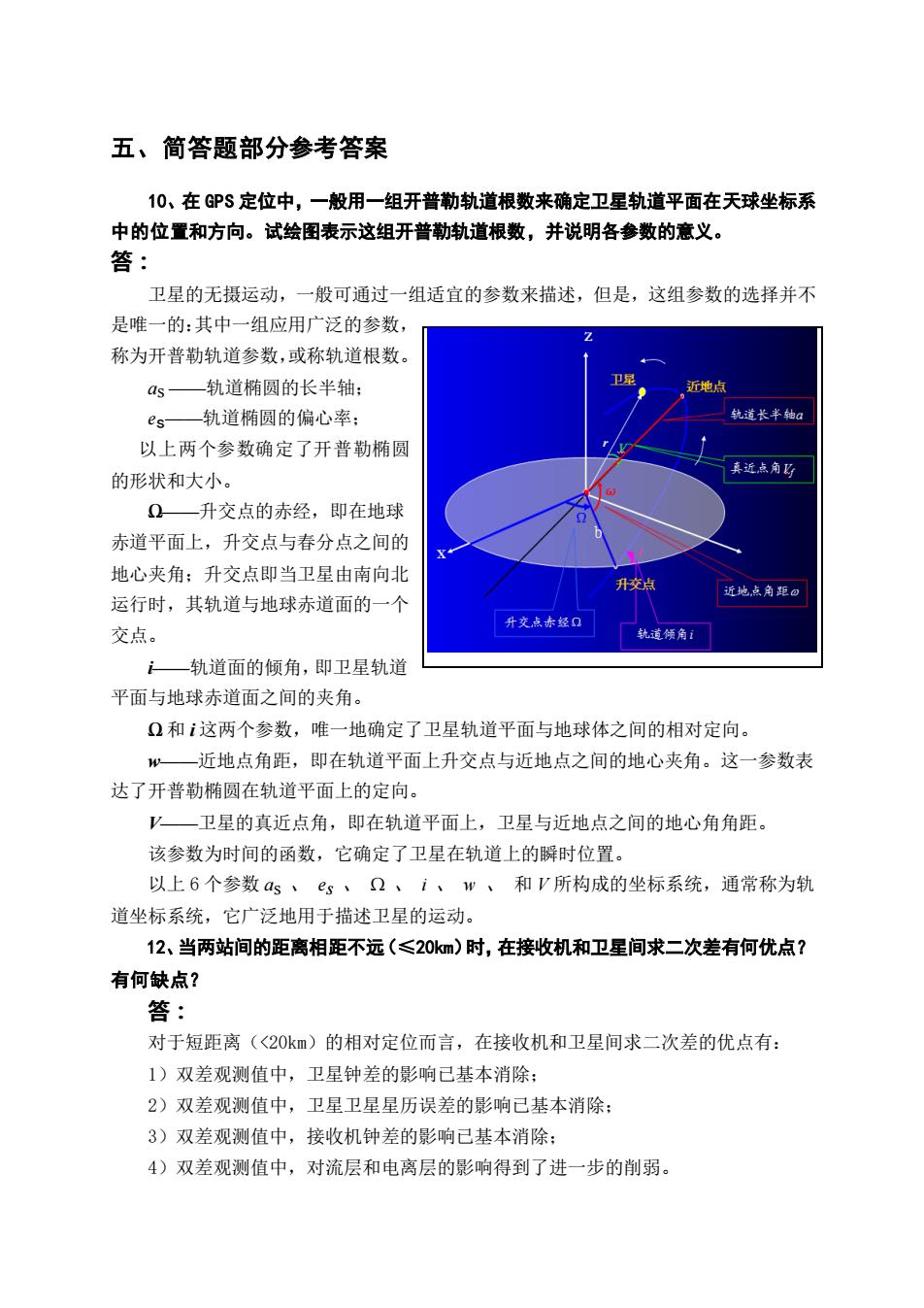
五、简答题部分参考答案 10、在 GPS 定位中,一般用一组开普勒轨道根数来确定卫星轨道平面在天球坐标系 中的位置和方向。试绘图表示这组开普勒轨道根数,并说明各参数的意义。 答: 卫星的无摄运动,一般可通过一组适宜的参数来描述,但是,这组参数的选择并不 是唯一的:其中一组应用广泛的参数, 称为开普勒轨道参数,或称轨道根数。 as ——轨道椭圆的长半轴; es——轨道椭圆的偏心率; 以上两个参数确定了开普勒椭圆 的形状和大小。 Ω——升交点的赤经,即在地球 赤道平面上,升交点与春分点之间的 地心夹角;升交点即当卫星由南向北 运行时,其轨道与地球赤道面的一个 交点。 i——轨道面的倾角,即卫星轨道 平面与地球赤道面之间的夹角。 Ω 和 i 这两个参数,唯一地确定了卫星轨道平面与地球体之间的相对定向。 w——近地点角距,即在轨道平面上升交点与近地点之间的地心夹角。这一参数表 达了开普勒椭圆在轨道平面上的定向。 V——卫星的真近点角,即在轨道平面上,卫星与近地点之间的地心角角距。 该参数为时间的函数,它确定了卫星在轨道上的瞬时位置。 以上 6 个参数 as 、 es 、 Ω 、 i 、 w 、 和 V 所构成的坐标系统,通常称为轨 道坐标系统,它广泛地用于描述卫星的运动。 12、当两站间的距离相距不远(≤20km)时,在接收机和卫星间求二次差有何优点? 有何缺点? 答: 对于短距离(<20km)的相对定位而言,在接收机和卫星间求二次差的优点有: 1)双差观测值中,卫星钟差的影响已基本消除; 2)双差观测值中,卫星卫星星历误差的影响已基本消除; 3)双差观测值中,接收机钟差的影响已基本消除; 4)双差观测值中,对流层和电离层的影响得到了进一步的削弱
但对于差分观测值也有一些缺点,主要表现在: 1)数据利用率较低,许多好的观测值会因为与之配对的数据出了问题而无法被 利用。求差的次数越多,丢失的观测值也越多,数据利用率就越低。 2)在接收机间求差后,会引进基线矢量而不是原来的位置矢量作为基本未知数, 这是一个新的更为复杂的概念,特别是使用多台接收机进行网定位时较难处理。 3)求差后会出现观测值间的相关性问题,增加了计算的工作量。 4)在某些情况下难以求差,例如两站的数据输出率不相同时。 5)在求差过程中有效数字将迅速减少,计算中凑整误差等影响将增大,从而影响 最后结果的精度。 6)求差法实质上是未对多余参数作任何约束,即认为各多余参数是相互独立的。 在某些情况下使用求差法的误差模型是有效的,如使用高精度的原子钟作外接频标时, 在小范围内进行相对定位时,精度要求不太高时等等。 7)采用求差法时多余参数已被消去,因此难以对这些参数作进一步研究(当然也可 以来用回代法求出,但需另增加工作量)。如果采用非差法并建立多余参数间的误差模 型,这些多余参数(例如钟的改正模型)就可以作为副产品同时求出。这些资料对于进 步的研究是十分有价值的。 14、坐标联测的目的是什么?实现这一目的的数据处理基本思想是什么?对联测点 有何要求? 答: 1)坐标联测的目的 ①GPS定位获得的是在WGS-84坐标系下的观测量一一基线向量,经空间无约束平差 后,可获得WGS-84空间直角坐标系下的坐标(XyZ)G, ②只有将其转换为地方参考坐标系(即地面网所在的参考坐标系)下的高斯平面直 角坐标(和以似大地水准面为基准的正常高),才能便于实际应用。 ③为实现这种转换,在布设GPS网时,需要选择一些地方参考坐标系(即地面网所 在的参考坐标系)下坐标己知的控制点,并同时在这些点上进行GS测量,这种点称为 坐标联测点,在联测点上进行GS测量的过程称为坐标联测。 2)实现这一目的的数据处理基本思想 坐标联测的目的是为了实现坐标系统转换。进行坐标转换的基本思想是: ①根据坐标联测点的两套坐标,建立两坐标系间的坐标转换模型: ②然后采用最小二乘法求解转换参数,并对转换参数的显著性进行检验: ③根据转换参数及相应的坐标转换模型,将所有GS点在WGS-84坐标系下的坐标 转换成地方参考坐标系下的坐标: ④对转换后GPS网的质量进行评价
但对于差分观测值也有一些缺点,主要表现在: 1)数据利用率较低,许多好的观测值会因为与之配对的数据出了问题而无法被 利用。求差的次数越多,丢失的观测值也越多,数据利用率就越低。 2)在接收机间求差后,会引进基线矢量而不是原来的位置矢量作为基本未知数, 这是一个新的更为复杂的概念,特别是使用多台接收机进行网定位时较难处理。 3)求差后会出现观测值间的相关性问题,增加了计算的工作量。 4)在某些情况下难以求差,例如两站的数据输出率不相同时。 5)在求差过程中有效数字将迅速减少,计算中凑整误差等影响将增大,从而影响 最后结果的精度。 6)求差法实质上是未对多余参数作任何约束,即认为各多余参数是相互独立的。 在某些情况下使用求差法的误差模型是有效的,如使用高精度的原子钟作外接频标时, 在小范围内进行相对定位时,精度要求不太高时等等。 7)采用求差法时多余参数已被消去,因此难以对这些参数作进一步研究(当然也可 以来用回代法求出,但需另增加工作量)。如果采用非差法并建立多余参数间的误差模 型,这些多余参数(例如钟的改正模型)就可以作为副产品同时求出。这些资料对于进一 步的研究是十分有价值的。 14、坐标联测的目的是什么?实现这一目的的数据处理基本思想是什么?对联测点 有何要求? 答: 1)坐标联测的目的 ①GPS 定位获得的是在 WGS-84 坐标系下的观测量——基线向量,经空间无约束平差 后,可获得 WGS-84 空间直角坐标系下的坐标(X Y Z)G, ②只有将其转换为地方参考坐标系(即地面网所在的参考坐标系)下的高斯平面直 角坐标(和以似大地水准面为基准的正常高),才能便于实际应用。 ③为实现这种转换,在布设 GPS 网时,需要选择一些地方参考坐标系(即地面网所 在的参考坐标系)下坐标已知的控制点,并同时在这些点上进行 GPS 测量,这种点称为 坐标联测点,在联测点上进行 GPS 测量的过程称为坐标联测。 2)实现这一目的的数据处理基本思想 坐标联测的目的是为了实现坐标系统转换。进行坐标转换的基本思想是: ①根据坐标联测点的两套坐标,建立两坐标系间的坐标转换模型; ②然后采用最小二乘法求解转换参数,并对转换参数的显著性进行检验; ③根据转换参数及相应的坐标转换模型,将所有 GPS 点在 WGS-84 坐标系下的坐标, 转换成地方参考坐标系下的坐标; ④对转换后 GPS 网的质量进行评价
3)对联测点的要求 为保证转换后GPS网的质量,对坐标联测点提出了如下主要要求 ①联测点要有足够的数量:不能少于3个,有条件时尽量多一些: ②联测点的分布要均匀:联测点的分布要能覆盖整个测区,外围和中部要有连测点 ③联测点的质量好:尽量利用测区中高等级点作为联测点;联测点标石稳定:便于 采用GPS技术进行观测。 15、高程联测的目的是什么?实现这一目的的数据处理基本思想是什么?对联测点 有何要求? 1)高程联测的目的 ①GPS定位获得的高程是GPS点在WGS-84坐标系中的大地高。大地高(D是地面 点沿法线投影到椭球面的距离,所以大地高系统是以椭球面为基准面的高程系统。而实 际工程应用中,通常需要的是正常高。正常高是从正常椭球面出发,沿法线方向到正常 位等于地面重力位的点的距离。 ②只有将GS点的大地高转换为以似大地水准面为基准的正常高,才能便于实际应 用、 ③为实现这种转换,在布设GPS网时,需采用几何水准方法联测部分GPS点,这些 被联测的GPS点,称为水准联测点。测定联测点水准高程的过程称为水准联测。 2)实现这一目的的数据处理基本思想 水准联测的目的是为了实现高程系统转换。进行高程系统转换的基本思想是 ①根据联测点的坐标和两套高程之差(即高程异常),建立测区高程异常拟合模型: ②然后采用最小二乘法求解转换参数,并对转换参数的显著性进行检验: ③根据高程异常拟合模型和GS点的坐标,求得所有GPS点的高程异常:根据高程 异常和大地高,得GPS点的正常高 ④对GPS水准高程精度进行评价。 3)对联测点的要求 为保证转换后GPS水准高程的精度,对联测点提出了如下主要要求: ①联测点要有足够的数量:不能少于6个,有条件时尽量多一些: ②联测点的分布要均匀:联测点的分布要能覆盖整个测区,外围和中部要有连测点: ③联测点的质量好:联测点标石稳定:联测精度合乎相应等级水准的要求,便于采 用GPS技术进行观测。 16、GPS网空间无约束平差的目的是什么? GPS网空间无约束平差,即只固定网中某一点坐标的平差方法。无约束平差的目的
3)对联测点的要求 为保证转换后 GPS 网的质量,对坐标联测点提出了如下主要要求: ①联测点要有足够的数量:不能少于 3 个,有条件时尽量多一些; ②联测点的分布要均匀:联测点的分布要能覆盖整个测区,外围和中部要有连测点; ③联测点的质量好:尽量利用测区中高等级点作为联测点;联测点标石稳定;便于 采用 GPS 技术进行观测。 15、高程联测的目的是什么?实现这一目的的数据处理基本思想是什么?对联测点 有何要求? 答: 1)高程联测的目的 ①GPS 定位获得的高程是 GPS 点在 WGS-84 坐标系中的大地高。大地高(H)是地面 点沿法线投影到椭球面的距离,所以大地高系统是以椭球面为基准面的高程系统。而实 际工程应用中,通常需要的是正常高。正常高是从正常椭球面出发,沿法线方向到正常 位等于地面重力位的点的距离。 ②只有将 GPS 点的大地高转换为以似大地水准面为基准的正常高,才能便于实际应 用。 ③为实现这种转换,在布设 GPS 网时,需采用几何水准方法联测部分 GPS 点,这些 被联测的 GPS 点,称为水准联测点。测定联测点水准高程的过程称为水准联测。 2)实现这一目的的数据处理基本思想 水准联测的目的是为了实现高程系统转换。进行高程系统转换的基本思想是: ①根据联测点的坐标和两套高程之差(即高程异常),建立测区高程异常拟合模型; ②然后采用最小二乘法求解转换参数,并对转换参数的显著性进行检验; ③根据高程异常拟合模型和 GPS 点的坐标,求得所有 GPS 点的高程异常;根据高程 异常和大地高,得 GPS 点的正常高 ④对 GPS 水准高程精度进行评价。 3)对联测点的要求 为保证转换后 GPS 水准高程的精度,对联测点提出了如下主要要求: ①联测点要有足够的数量:不能少于 6 个,有条件时尽量多一些; ②联测点的分布要均匀:联测点的分布要能覆盖整个测区,外围和中部要有连测点; ③联测点的质量好:联测点标石稳定;联测精度合乎相应等级水准的要求,便于采 用 GPS 技术进行观测。 16、GPS 网空间无约束平差的目的是什么? GPS 网空间无约束平差,即只固定网中某一点坐标的平差方法。无约束平差的目的

是多方面的。 其一是建立GS网的位置基准。确定一个三维网在空间直角坐标系中的位置,需要 三个坐标的定位基准,一个尺度基准和三个方向基准,即三个绝对定位和四个相对定位 共七个基准。GS观测值是两点间的基线向量,即三维坐标差,是一种长度、高差和方 位观测量,因而包含了尺度信息和方向信息。这样,网的尺度基准和方向基准可由网的 相关最小二乘估计唯一确定,而与网的平差方法无关。但网的位置基准与平差中所取网 点的近似坐标系统和采用的平差方法有关。对于城市或矿区等区域性GS网而言,一般 取网中的一点(多在网的中部)的单点绝对定位结果作为位置基准。 第二,是发现基线闭合环路闭合差发现不了的小的基线向量粗差,在确定没有粗差 后,通过验后方差因子的×2检验发现基线向量随机模型的误差。 第三,根据平差结果,客观地评价GS网本身的内部符合精度及网的可靠性,如单 位权中误差、点位中误差、基线边中误差及其相对中误差:同时为利用GS大地高与水 准联测点的正常高联合确定GPS网点的正常高提供平差处理后的大地高程数据。 第四,是以后分析GS网坐标转换过程中,地面网基准点或约束条件中有无不相容 的误差的基础。 20、什么叫GPS网的基准设计?GPS网的基准包括哪些? 答 GPS测量获得的是GPS基线向量,它属于WGS-84坐标系的三维坐标差,而实际我们 需要的是国家坐标系或地方独立坐标系的坐标。所以在GS网的技术设计时,必须明确 GPS成果所采用的坐标系统和起算数据,即明确GS网所采用的基准。我们将这项工作 称之为GPS网的基准设计。 GS网的基准包括位置基准、方位基准和尺度基准。方位基准一般以给定的起算方 位角值确定,也可以由GS基线向量的方位作为方位基准。尺度基准一般由地面的电磁 波测距确定,也可由两个以上的起算点间的距离确定,同时也可由GS基线向量的距离 确定。GPS网的位置基准,一般都是由给定的起算点坐标确定。因此,GPS网的基准设 计,实质上主要是指确定网的位置基准问题。 26、下式是测站p的线性化伪距观测方程, PiLo Po +(p1+c-8prop-8pom+hpl·sin p)=0 试回答以下问题: 1)解释各参数的含义 2)利用伪距进行绝对定位时,为什么要至少同步观测四颗G$卫星? 解:
是多方面的。 其一是建立 GPS 网的位置基准。确定一个三维网在空间直角坐标系中的位置,需要 三个坐标的定位基准,一个尺度基准和三个方向基准,即三个绝对定位和四个相对定位 共七个基准。GPS 观测值是两点间的基线向量,即三维坐标差,是一种长度、高差和方 位观测量,因而包含了尺度信息和方向信息。这样,网的尺度基准和方向基准可由网的 相关最小二乘估计唯一确定,而与网的平差方法无关。但网的位置基准与平差中所取网 点的近似坐标系统和采用的平差方法有关。对于城市或矿区等区域性 GPS 网而言,一般 取网中的一点(多在网的中部)的单点绝对定位结果作为位置基准。 第二,是发现基线闭合环路闭合差发现不了的小的基线向量粗差,在确定没有粗差 后,通过验后方差因子的χ2检验发现基线向量随机模型的误差。 第三,根据平差结果,客观地评价 GPS 网本身的内部符合精度及网的可靠性,如单 位权中误差、点位中误差、基线边中误差及其相对中误差;同时为利用 GPS 大地高与水 准联测点的正常高联合确定 GPS 网点的正常高提供平差处理后的大地高程数据。 第四,是以后分析 GPS 网坐标转换过程中,地面网基准点或约束条件中有无不相容 的误差的基础。 20、什么叫 GPS 网的基准设计? GPS 网的基准包括哪些? 答: GPS 测量获得的是 GPS 基线向量,它属于 WGS-84 坐标系的三维坐标差,而实际我们 需要的是国家坐标系或地方独立坐标系的坐标。所以在 GPS 网的技术设计时,必须明确 GPS 成果所采用的坐标系统和起算数据,即明确 GPS 网所采用的基准。我们将这项工作 称之为 GPS 网的基准设计。 GPS 网的基准包括位置基准、方位基准和尺度基准。方位基准一般以给定的起算方 位角值确定,也可以由 GPS 基线向量的方位作为方位基准。尺度基准一般由地面的电磁 波测距确定,也可由两个以上的起算点间的距离确定,同时也可由 GPS 基线向量的距离 确定。GPS 网的位置基准,一般都是由给定的起算点坐标确定。因此,GPS 网的基准设 计,实质上主要是指确定网的位置基准问题。 26、下式是测站 p1的线性化伪距观测方程, sin ) 0 ~ ( 1 1 1 1 1 1,0 1,0 0 1 1 1,0 0 1 1 1,0 0 1 + + − − + • = − − − + − + − i trop ion p p i i p i i p p p p i p i p p i p i p p i p c t h Z c t Z Z Y Y Y X X X 试回答以下问题: 1)解释各参数的含义 2)利用伪距进行绝对定位时,为什么要至少同步观测四颗 GPS 卫星? 解:
1)式(1)中各参数的含义如下: (Xp1 y opl Zop1)为测站p1的近似坐标 (6X,16Yp16Z)为测站p1的近似坐标的改正数: (X,Y,Z)为卫星i的瞬时坐标,6‘为卫星钟钟差: P为由测站近似坐标和卫星瞬时坐标计算的测站到卫星的几何距离: 为接收机伪距观测值:。为接收机钟差改正: 6Pmp和6pon分别为对流层和电离层的折射改正 h为天线高,日为测站p1到卫星i的高度角: hsi日为将卫星到天线相位中心的距离改正到至测站标石中心距离的改正项。 2)利用伪距进行绝对定位时,在式(1)中,仅测站的近似坐标的改正数(共三 个分量)和接收机钟差改正数需要求解,而其他参数有的是通过观测而得,有的通过计 算得到。而一颗卫星只能列立一个误差方程,要求解4个参数则必须有4个误差方程方 可,即必须至少同步观测4可GPS卫星方可实现绝对定位。 27、下式是测站p1对卫星在任一历元的线性化载波相位观测方程的简化形式, p=P+fap-f8-Ni+(△plrop+△)(①) 试回答以下问题: 1)解释各参数的含义; 2)导出测站p1和pm对卫星1的单差观测方程; 3)单差观测值中削弱或消除了哪些因素的影响? 解: 1)式(1)中各参数的含义如下: ∫为载波的颜率,c为光速: 6t'为卫星钟钟差:1为接收机钟差: P为由测站坐标和卫星瞬时坐标计算的测站到卫星的几何距离: p1是在该观测历元测站p1上的接收机对卫星i的载波相位观测值: N称为测站p)上的接收机对卫星i的载波相位观测值的整周未知数或整周模糊度。 △pmp和公pm分别为测站p1到卫星i的的对流层和电离层折射改正: 2)导出测站p和p2对卫星1的单差观测方程 由式(1),P2对卫星1的载波相位观测值方程为 p2 =Pp2 +fop2-for-N+(Ap2o+Ap2ion) 则测站P1和P2对卫星i的单差观测方程为
1)式(1)中各参数的含义如下: (X 0 p1 Y 0 p1 Z 0 p1)为测站 p1的近似坐标 (δXp1 δYp1 δZp1)为测站 p1 的近似坐标的改正数; (X i,Y i,Z i)为卫星 i 的瞬时坐标,δt i 为卫星钟钟差; i p1,0 为由测站近似坐标和卫星瞬时坐标计算的测站到卫星的几何距离; i p1 ~ 为接收机伪距观测值; p1 t 为接收机钟差改正; δρtrop 和δρion 分别为对流层和电离层的折射改正; h 为天线高,θ 为测站 p1 到卫星 i 的高度角; h•sinθ 为将卫星到天线相位中心的距离改正到至测站标石中心距离的改正项。 2)利用伪距进行绝对定位时,在式(1)中,仅测站 p1 的近似坐标的改正数(共三 个分量)和接收机钟差改正数需要求解,而其他参数有的是通过观测而得,有的通过计 算得到。而一颗卫星只能列立一个误差方程,要求解 4 个参数则必须有 4 个误差方程方 可,即必须至少同步观测 4 可 GPS 卫星方可实现绝对定位。 27、下式是测站 p1对卫星 i 在任一历元的线性化载波相位观测方程的简化形式, ( ) (1) 1 1 1 1 1, 1, i p ion i p trop i p i p i p i p c f f t f t N c f = + − − + + 试回答以下问题: 1)解释各参数的含义; 2)导出测站 p1和 p2对卫星 i 的单差观测方程; 3)单差观测值中削弱或消除了哪些因素的影响? 解: 1)式(1)中各参数的含义如下: f 为载波的频率,c 为光速; δt i 为卫星钟钟差; p1 t 为接收机钟差; i p1 为由测站坐标和卫星瞬时坐标计算的测站到卫星的几何距离; φi p1 是在该观测历元测站 p1 上的接收机对卫星 i 的载波相位观测值; N i p1 称为测站 p1 上的接收机对卫星 i的载波相位观测值的整周未知数或整周模糊度。 i p1,trop 和 i p1,ion 分别为测站 p1 到卫星 i 的的对流层和电离层折射改正; 2)导出测站 p1和 p2对卫星 i 的单差观测方程 由式(1), p2 对卫星 i 的载波相位观测值方程为 ( ) 2 2 2 2 2, 2, i p ion i p trop i p i p i p i p c f f t f t N c f = + − − + + 则测站 p1 和 p2 对卫星 i 的单差观测方程为