
PLA自动泊车系统介绍
PLA自动泊车系统介绍
概要 由于车后盲区所造成的交通事故在中国约占30%,美 国20%,交管部门建议车主安装多曲率大视野后视镜来减 少车后盲区,提高车辆的客全性能,但依旧无法有效降低 并控制事故的爱生。汽军尾部盲区所潜在的危险,往往会 给人们带来生命财产的重大损失以及精神上的严重伤害 福最烈絷聚尧素前言,莓次简军时更是司以用瞻前顾 后, 现有的汽车倒车辅助产品如果从手动与自动的区别来 分大致可分为两类:,一类是手动类(以传统倒车系统为代 表和一类是自动类(或智能倒车系统为代表),。传统倒 车系统主要以倒车雷达和倒军可视为代表,通过发出警示 音或可视后部情况提醒车主车后情况,、使其主动闪避, 以减少事故伤害。该产品对于驾驶者而言,主动性较差 虽然能在狼天程度上避免车辆对行人的伤害,却无法顺利 有效的亮成泊军,极易造成刮蹭或碰撞
概 要 由于车后盲区所造成的交通事故在中国约占30%,美 国20%,交管部门建议车主安装多曲率大视野后视镜来减 少车后盲区,提高车辆的安全性能,但依旧无法有效降低 并控制事故的发生。汽车尾部盲区所潜在的危险,往往会 给人们带来生命财产的重大损失以及精神上的严重伤害。 对于新手司机或女士而言,每次倒车时更是可以用瞻前顾 后,胆战心惊来形容。 现有的汽车倒车辅助产品如果从手动与自动的区别来 分大致可分为两类:一类是手动类(以传统倒车系统为代 表)和一类是自动类(以智能倒车系统为代表)。传统倒 车系统主要以倒车雷达和倒车可视为代表,通过发出警示 声音或可视后部情况提醒车主车后情况,使其主动闪避, 以减少事故伤害。该产品对于驾驶者而言,主动性较差, 虽然能在很大程度上避免车辆对行人的伤害,却无法顺利 有效的完成泊车,极易造成刮蹭或碰撞

PLA主要有以下系统组成 >ESP(车身电子稳定系统): PLA驻车辅助系统控制单元 提供车速等信息防止侧滑; 后部PDC系统传感器 >EPS(电子转向):控制 车后内部扬声器 方向盘的转动; >多功能仪表:提示停车位 侧面PLA超声波传感 的信息和档位切换信息; >PLA开关:激活和关PLA 系统; >PLA传感器:测量停车位 车前内部扬声器 的长度; >PDC(停车距离控制系统) 前部PDC系统传感器 侧面PLA超声波传感器 传感器:探测周围障碍物
车后内部扬声器 侧面PLA超声波传感 器 前部PDC系统传感器 后部PDC系统传感器 车前内部扬声器 侧面PLA超声波传感器 PLA驻车辅助系统控制单元 PLA主要有以下系统组成 ➢ESP(车身电子稳定系统 ): 提供车速等信息防止侧滑; ➢EPS( 电子转向): 控制 方向盘的转动; ➢多功能仪表: 提示停车位 的信息和档位切换信息; ➢ PLA 开关:激活和关PLA 系统; ➢PLA传感器: 测量停车位 的长度; ➢PDC(停车距离控制系统) 传感器: 探测周围障碍物
前PDC PLA系统传感器探测范围介绍: >后保险杆上有4个PDC传感器。 1.中间2个探测范围是160厘米。 2.两边2个探测范围是60厘米。 >前保上有4个PDC传感器和2个PLA传感器: 1.前面4个是PDC传感器,中间2个探测范围120厘米; 2.外侧2个PLA传感器,探测范围60厘米; >前后PDC的连续报警区都是30厘米。 后PDC
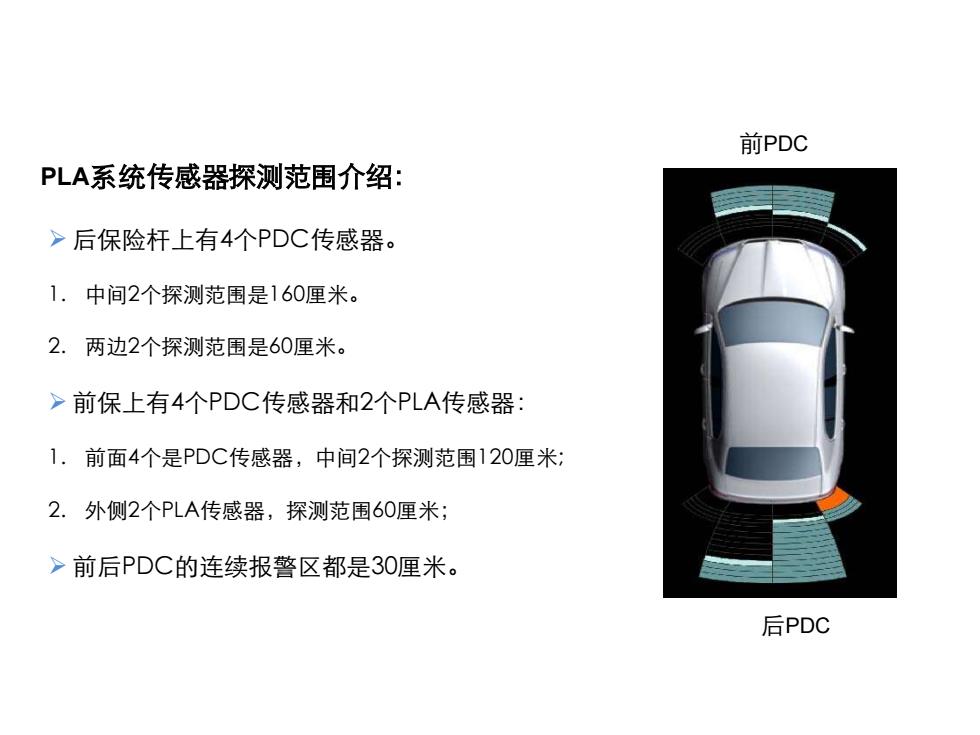
前PDC 后PDC ➢ 后保险杆上有4个PDC传感器。 1. 中间2个探测范围是160厘米。 2. 两边2个探测范围是60厘米。 ➢ 前保上有4个PDC传感器和2个PLA传感器: 1. 前面4个是PDC传感器,中间2个探测范围120厘米; 2. 外侧2个PLA传感器,探测范围60厘米; ➢ 前后PDC的连续报警区都是30厘米。 PLA系统传感器探测范围介绍:

PLA系统技术参数 系统版本 PLA1.5 系统特性 单步停车和多步停车 前进车速要求 ≤30Km/h 前进时,与旁边车辆距离要求 50cm~150cm 倒车车速要求 ≤7Km/h 倒车时间(挂入R档后)要求 ≤3分钟 单步停车,停车位长度最小要求 ≥整车长度+140cm 多步停车,停车位长度最小要求 ≥整车长度+80cm 备注 多步泊车
PLA系统技术参数 系统版本 PLA1.5 系统特性 单步停车和多步停车 前进车速要求 ≤30Km/h 前进时,与旁边车辆距离要求 50cm~150cm 倒车车速要求 ≤7Km/h 倒车时间(挂入R档后)要求 ≤3分钟 单步停车,停车位长度最小要求 ≥ 整车长度+140cm 多步停车,停车位长度最小要求 ≥ 整车长度+80cm 备注 多步泊车