第11卷第5期 智能系统学报 Vol.11 No.5 2016年10月 CAAI Transactions on Intelligent Systems 0ct.2016 D0I:10.11992/is.201511011 网络出版地址:htp:/nww.cnki.net/kcms/detail/23.1538.TP.20160824.0929.012.html 多特征的光学遥感图像多目标识别算法 姬晓飞,秦宁丽2,刘洋1 (1.沈阳航空航天大学自动化学院,辽宁沈阳110136:2.北京国电通网络技术有限公司,北京100070) 摘要:基于单一特征的光学遥感图像多目标分类识别存在准确性较差的问题,提出一种新的基于多特征决策级融 合的多目标分类识别算法。首先对光学遥感图像目标提取3种能够同时满足平移、旋转和尺度不变性的特征:可以 描述局部和全局分布特性的分层BoF-SIFT特征,描述目标边缘轮廓点信息的改进后的SC形状特征,对图像中较大 目标识别较好的H山不变矩特征:其次采用基于径向基核函数的一对一支持向量机算法分别获得3种特征的目标识 别概率,并设计了一种多特征决策级加权融合的策略实现对多目标的分类。经多次实验验证该算法对光学遥感图 像多目标具有较好的分类识别性能,达到了93.52%的正确识别率。 关键词:光学遥感图像;多特征的决策级融合;分层的BoF-SIFT特征:SC形状特征;Hu不变矩特征;支持向量机 中图分类号:TP751.1文献标志码:A文章编号:1673-4785(2016)05-0655-08 中文引用格式:姬晓飞,秦宁丽,刘洋.多特征的光学遥感图像多目标识别算法研究[J].智能系统学报,2016,11(5):655-662. 英文引用格式:JI Xiaofei,QIN Ningli,LIU Yang.Research on multi-feature based multi--target recognition algorithm for optical re- mote sensing image[J].CAAI transactions on intelligent systems,2016,11(5):655-662. Research on multi-feature based multi-target recognition algorithm for optical remote sensing image JI Xiaofei',QIN Ningli2,LIU Yang' (1.School of Automation,Shenyang Aerospace University,Shenyang 110136,China;2.Beijing GuoDianTong Network Technology Co. Ltd,Beijing 100070,China) Abstract:A novel multi-feature decision level fusion recognition algorithm is proposed to solve the problem of poor levels of accuracy with single feature based multi-target classification of optical remote sensing images.Firstly,three kinds of features which can not only meet translation,rotation,and scale invariance are extracted.One is the hier- archical BoF-SIFT feature which can simultaneously describe local and global distributions.Another is the improved shape context feature which is used to describe the target edge contour point information.The other one is Hu mo- ment invariants which gives better levels of recognition performance for large targets.Secondly,the recognition probabilities of these features are obtained using a one versus one support vector machine based on a radial basis function.Thirdly a strategy for multi-feature decision level fusion is designed.A large number of experiments show that the algorithm for multi-target classification of optical remote sensing images performs better with the recognition rate of targets reaching 93.52%. Keywords:optical remote sensing image;multi-features decision level fusion;hierarchical BoF-SIFT feature; shape context feature;Hu moment invariants;support vector machine 随着遥感技术和模式识别技术的不断发展,遥 标分类识别,已经成为了遥感图像处理和分析领域 感图像目标分类识别,尤其是光学遥感图像中的目 备受关注的重要方向山。 光学遥感图像目标识别算法的准确性很大程度 收稿日期:2015-11-10.网络出版日期:2016-08-24. 基金项目:国家自然科学基金项目(61103123):辽宁省高等学校优秀人 上取决于所提取特征的适应性。文献[2]提出了基 才支持计划项目(LJQ214018):辽宁省自然科学基金项目 (2015020101). 于自组织特征映射(self-organizing feature map, 通信作者:姬晓飞.E-mail:jixiaofei7804@126.com. SOFM)网络模型的纹理分类算法,该算法仅对飞机
第 11 卷第 5 期 智 能 系 统 学 报 Vol.11 №.5 2016 年 10 月 CAAI Transactions on Intelligent Systems Oct. 2016 DOI:10.11992 / tis.201511011 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.TP.20160824.0929.012.html 多特征的光学遥感图像多目标识别算法 姬晓飞1 ,秦宁丽2 ,刘洋1 (1.沈阳航空航天大学 自动化学院,辽宁 沈阳 110136; 2.北京国电通网络技术有限公司,北京 100070) 摘 要:基于单一特征的光学遥感图像多目标分类识别存在准确性较差的问题,提出一种新的基于多特征决策级融 合的多目标分类识别算法。 首先对光学遥感图像目标提取 3 种能够同时满足平移、旋转和尺度不变性的特征:可以 描述局部和全局分布特性的分层 BoF⁃SIFT 特征,描述目标边缘轮廓点信息的改进后的 SC 形状特征,对图像中较大 目标识别较好的 Hu 不变矩特征;其次采用基于径向基核函数的一对一支持向量机算法分别获得 3 种特征的目标识 别概率,并设计了一种多特征决策级加权融合的策略实现对多目标的分类。 经多次实验验证该算法对光学遥感图 像多目标具有较好的分类识别性能,达到了 93.52%的正确识别率。 关键词:光学遥感图像;多特征的决策级融合;分层的 BoF⁃SIFT 特征;SC 形状特征;Hu 不变矩特征;支持向量机 中图分类号:TP751.1 文献标志码:A 文章编号:1673⁃4785(2016)05⁃0655⁃08 中文引用格式:姬晓飞,秦宁丽,刘洋.多特征的光学遥感图像多目标识别算法研究[J]. 智能系统学报, 2016, 11(5): 655⁃662. 英文引用格式:JI Xiaofei, QIN Ningli, LIU Yang.Research on multi⁃feature based multi⁃target recognition algorithm for optical re⁃ mote sensing image[J]. CAAI transactions on intelligent systems, 2016,11(5):655⁃662. Research on multi⁃feature based multi⁃target recognition algorithm for optical remote sensing image JI Xiaofei 1 , QIN Ningli 2 , LIU Yang 1 (1.School of Automation, Shenyang Aerospace University, Shenyang 110136, China; 2.Beijing GuoDianTong Network Technology Co. Ltd, Beijing 100070, China) Abstract:A novel multi⁃feature decision level fusion recognition algorithm is proposed to solve the problem of poor levels of accuracy with single feature based multi⁃target classification of optical remote sensing images. Firstly, three kinds of features which can not only meet translation, rotation, and scale invariance are extracted. One is the hier⁃ archical BoF⁃SIFT feature which can simultaneously describe local and global distributions. Another is the improved shape context feature which is used to describe the target edge contour point information. The other one is Hu mo⁃ ment invariants which gives better levels of recognition performance for large targets. Secondly, the recognition probabilities of these features are obtained using a one versus one support vector machine based on a radial basis function. Thirdly a strategy for multi⁃feature decision level fusion is designed. A large number of experiments show that the algorithm for multi⁃target classification of optical remote sensing images performs better with the recognition rate of targets reaching 93.52%. Keywords:optical remote sensing image; multi⁃features decision level fusion; hierarchical BoF⁃SIFT feature; shape context feature; Hu moment invariants; support vector machine 收稿日期:2015⁃11⁃10. 网络出版日期:2016⁃08⁃24. 基金项目:国家自然科学基金项目(61103123);辽宁省高等学校优秀人 才支持计划项目( LJQ214018);辽宁省自然科学基金项目 (2015020101). 通信作者:姬晓飞. E⁃mail:jixiaofei7804@ 126.com. 随着遥感技术和模式识别技术的不断发展,遥 感图像目标分类识别,尤其是光学遥感图像中的目 标分类识别,已经成为了遥感图像处理和分析领域 备受关注的重要方向[1] 。 光学遥感图像目标识别算法的准确性很大程度 上取决于所提取特征的适应性。 文献[2]提出了基 于自 组 织 特 征 映 射 ( self⁃organizing feature map, SOFM)网络模型的纹理分类算法,该算法仅对飞机
·656 智能系统学报 第11卷 目标得到了较好的识别效果:文献[3]提出了一种 变性; 能同时检测多个半径不一的圆形目标的Hough改 进算法;文献[4]采用模板匹配方法对提取了边缘 分层的 SVM BoF-SIFT 分类器 特征的目标进行粗检测,然后利用形状模型完成细 特征 决策级融合 匹配进行飞机的识别,这一过程中采用PCA(princi- 训练集 改进的SC SVM 特征 分类器2 算法 pal component analysis)降维方法增强样本空间的可 H不店币 样本库 SVM 描述性,但耗时较长,通用性不强。以上研究表明: 特征 分类器3 类 单一特征的识别性能有限,将单一特征应用在多类 测试集 特征提取 目标分类识别上容易造成某一类目标的显著特征丢 失而降低识别的准确性。因此多特征融合是提高多 图1算法的整体框架 Fig.1 The framework of the algorithm 目标分类识别性能的一个有效方案。 在多特征融合领域包含特征级和决策级融合2 2)分类器的训练:利用3种特征,采用交叉验 个方面,特征级融合保留了目标的有效信息且分类 证的方法训练基于径向基核函数的一对一支持向量 精度较高,但该类方法不宜实现多种异构特征的融 机,得到多个一对一的支持向量机分类器: 合;决策级融合整体上降低了误判率,计算复杂度低 3)根据所设计的决策级概率融合策略,确定最 且易于实现异构特征的融合。文献[5]对高分辨率 优的概率融合权值: 遥感图像多个场景分别提取图像的视觉词袋局部特 4)将测试集特征分别送入已训练好的相对应 征、颜色直方图特征以及Gabor纹理特征,并对SVM 的支持向量机分类器得到单一特征的输出概率,在 (support vector machine)分类结果进行自适应加权 最优权值组合的基础上得到决策级融合结果。 综合获得了较高的识别率。该算法在决策级融合过 2多特征提取 程中较合理地解决了不同目标的显著特征差异性问 题,但所选择的数据库存在一定的偶然因素;文献 特征提取是目标分类识别中至关重要的一步 [6]采用多核学习的决策级融合算法实现对飞机、 本文选取了能够适应光学遥感图像平移、缩放和旋 油罐和舰船的分类。该方法融合了目标的形状核、 转差异性的分层的BoF-SIFT特征、改进的SC特征 点核以及外观核,得到了较理想的识别结果,然而耗 和Hu不变矩特征。 时较长,分析其所用数据库可知目标的旋转差异性 2.1分层的BoF-SIFT特征 小,特征适应性不强。尽管多特征决策级融合在解 鉴于遥感图像目标在尺度、缩放和旋转等方面 决分类问题上表现出了一定的优势,但计算复杂度 均具有较大的差异性,且在外界环境中受到光照强 较高是该类方法发展的最大瓶颈。 度、背景复杂及阴影的干扰,对目标的准确分类识别 综上所述,本文提出了一种新的多特征决策级 带来了极大的难度。由于SIFT(scale invariant fea- 融合的多类目标识别算法,在特征提取阶段提出了 ture transform)特征在多种特征描述算子中拥有较 一种对目标的全局和局部特性描述充分的分层的 优的鲁棒性,广泛应用在各个领域,因此本文在传统 BoF-SIFT(bag of feature-scale invariant feature trans- 的SIFT特征基础上提出了一种分层的BoF-SIFT特 form)特征,并对传统的形状SC(shape context)特征 征对遥感图像进行表示。 做了多方面的改进使其具有较强旋转适应性,在分 首先针对每个目标所能检测到的特征点数量和 类识别阶段设计了多特征决策级融合策略,该融合 位置不同,导致SFT特征维数不唯一的问题,本文 方法易于实现,最终取得令人满意的识别结果。 采用固定目标的特征点数及位置的方法给予处理: 其次BoF思想能直观地表示目标的特征,既能体现 1 算法整体框架 同一目标的相似度,又能体现不同目标的差异性:图 本文算法的整体框架如图1所示。 像金字塔思想能更细致地表示目标特征的分布特性, 算法大致分为4个步骤。 以上3点结合就得到了分层的BoF-SFT特征表示。 1)特征提取:将光学遥感图像中的4类目标分 生成分层的BoF-SFT特征的过程如图2所示。 为训练集和测试集,分别提取分层的BoF-SFT特 1)生成SFT描述子:样本总数为m,目标的像 征、改进的SC特征和Hu不变矩特征,以上选取的3 素大小为100×100,为了能充分表示目标的局部特 种特征共性是都能满足目标的平移、缩放和旋转不 征及统一特征维数,除去边缘2个像素的边缘效应 将剩余区域均匀划分为11×11=121个特征点,每两
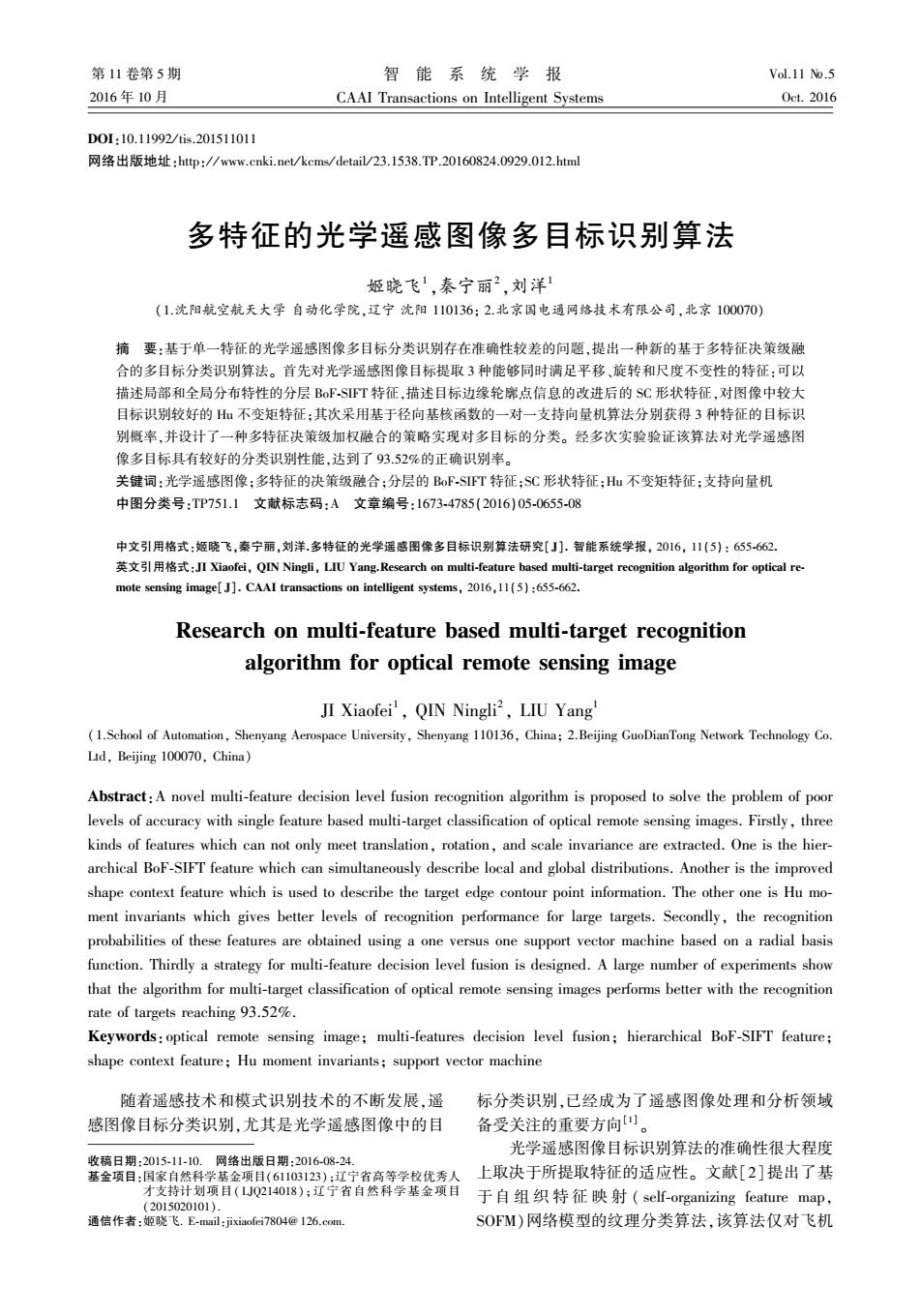
目标得到了较好的识别效果;文献[3]提出了一种 能同时检测多个半径不一的圆形目标的 Hough 改 进算法;文献[4]采用模板匹配方法对提取了边缘 特征的目标进行粗检测,然后利用形状模型完成细 匹配进行飞机的识别,这一过程中采用 PCA(princi⁃ pal component analysis)降维方法增强样本空间的可 描述性,但耗时较长,通用性不强。 以上研究表明: 单一特征的识别性能有限,将单一特征应用在多类 目标分类识别上容易造成某一类目标的显著特征丢 失而降低识别的准确性。 因此多特征融合是提高多 目标分类识别性能的一个有效方案。 在多特征融合领域包含特征级和决策级融合 2 个方面,特征级融合保留了目标的有效信息且分类 精度较高,但该类方法不宜实现多种异构特征的融 合;决策级融合整体上降低了误判率,计算复杂度低 且易于实现异构特征的融合。 文献[5]对高分辨率 遥感图像多个场景分别提取图像的视觉词袋局部特 征、颜色直方图特征以及 Gabor 纹理特征,并对 SVM (support vector machine)分类结果进行自适应加权 综合获得了较高的识别率。 该算法在决策级融合过 程中较合理地解决了不同目标的显著特征差异性问 题,但所选择的数据库存在一定的偶然因素;文献 [6]采用多核学习的决策级融合算法实现对飞机、 油罐和舰船的分类。 该方法融合了目标的形状核、 点核以及外观核,得到了较理想的识别结果,然而耗 时较长,分析其所用数据库可知目标的旋转差异性 小,特征适应性不强。 尽管多特征决策级融合在解 决分类问题上表现出了一定的优势,但计算复杂度 较高是该类方法发展的最大瓶颈。 综上所述,本文提出了一种新的多特征决策级 融合的多类目标识别算法,在特征提取阶段提出了 一种对目标的全局和局部特性描述充分的分层的 BoF⁃SIFT(bag of feature⁃scale invariant feature trans⁃ form)特征,并对传统的形状 SC(shape context)特征 做了多方面的改进使其具有较强旋转适应性,在分 类识别阶段设计了多特征决策级融合策略,该融合 方法易于实现,最终取得令人满意的识别结果。 1 算法整体框架 本文算法的整体框架如图 1 所示。 算法大致分为 4 个步骤。 1)特征提取:将光学遥感图像中的 4 类目标分 为训练集和测试集,分别提取分层的 BoF⁃SIFT 特 征、改进的 SC 特征和 Hu 不变矩特征,以上选取的 3 种特征共性是都能满足目标的平移、缩放和旋转不 变性; 图 1 算法的整体框架 Fig.1 The framework of the algorithm 2)分类器的训练:利用 3 种特征,采用交叉验 证的方法训练基于径向基核函数的一对一支持向量 机,得到多个一对一的支持向量机分类器; 3)根据所设计的决策级概率融合策略,确定最 优的概率融合权值; 4)将测试集特征分别送入已训练好的相对应 的支持向量机分类器得到单一特征的输出概率,在 最优权值组合的基础上得到决策级融合结果。 2 多特征提取 特征提取是目标分类识别中至关重要的一步, 本文选取了能够适应光学遥感图像平移、缩放和旋 转差异性的分层的 BoF⁃SIFT 特征、改进的 SC 特征 和 Hu 不变矩特征。 2.1 分层的 BoF⁃SIFT 特征 鉴于遥感图像目标在尺度、缩放和旋转等方面 均具有较大的差异性,且在外界环境中受到光照强 度、背景复杂及阴影的干扰,对目标的准确分类识别 带来了极大的难度。 由于 SIFT( scale invariant fea⁃ ture transform)特征在多种特征描述算子中拥有较 优的鲁棒性,广泛应用在各个领域,因此本文在传统 的 SIFT 特征基础上提出了一种分层的 BoF⁃SIFT 特 征对遥感图像进行表示。 首先针对每个目标所能检测到的特征点数量和 位置不同,导致 SIFT 特征维数不唯一的问题,本文 采用固定目标的特征点数及位置的方法给予处理; 其次 BoF 思想能直观地表示目标的特征,既能体现 同一目标的相似度,又能体现不同目标的差异性;图 像金字塔思想能更细致地表示目标特征的分布特性, 以上 3 点结合就得到了分层的 BoF⁃SIFT 特征表示。 生成分层的 BoF⁃SIFT 特征的过程如图 2 所示。 1)生成 SIFT 描述子:样本总数为 m,目标的像 素大小为 100×100,为了能充分表示目标的局部特 征及统一特征维数,除去边缘 2 个像素的边缘效应 将剩余区域均匀划分为 11×11 = 121 个特征点,每两 ·656· 智 能 系 统 学 报 第 11 卷
第5期 姬晓飞,等:多特征的光学遥感图像多目标识别算法研究 .657· 个特征点相隔8个像素,然后以特征点为中心的 m×l21个特征点的SlFT描述进行K-means++聚 16×16邻域窗口采样,之后将其划分为4×4的子区 类[劉,该聚类方法弥补了传统的K-means聚类种子 域,对16个子区域进行平滑处理,在每个子区域内提 点随机选取的不足,图3和图4分别为不同目标的 取8个方向的幅值和梯度信息,即每个特征点的ST BoF-SIFT描述子和同一目标在不同旋转角度下的 描述子由4×4×8=128维的特征进行表示,最终得到所 BoF-SIFT特征表示,显然不同目标之间呈现了一定 有样本中m×121个特征点的ST描述子; 的差异性及同一目标之间具有一定的相似性,表明 2)生成BoF-SFT]特征:将所有样本中提取的 BoF-SIFT具有较好的旋转鲁棒性; 提取 16×16 window 128 window vector SIFT特征 SFT特征 解鼻多带 投影 (1) 密密流 (2) ※漫岁常 拼 Keypoint 提取原始图像的SIFT特征 (3) 4) 山围 Level, Level. Level K-Means+聚类 分层的21个维列向量 原图 生成BoF-SIFT特征BoF-SIFT特征 图2分层的BoF-SFT特征提取算法示意图 Fig.2 The processing of hierarchical features extraction 船舰 飞机 汽车 油罐 0.6 0.6 0.6 0.5 0.5 0.4 0.4 0.4 0.3 0.3 0.3 0.2 0.1 0.1 0.1 2468101214161820 02468101214161820 02468101214161820 0 46810121416182 聚类中心 聚类中心 聚类中心 聚类中心 图3不同目标的BoF-SFT描述子 Fig.3 The BoF-SIFT descriptors of different targets
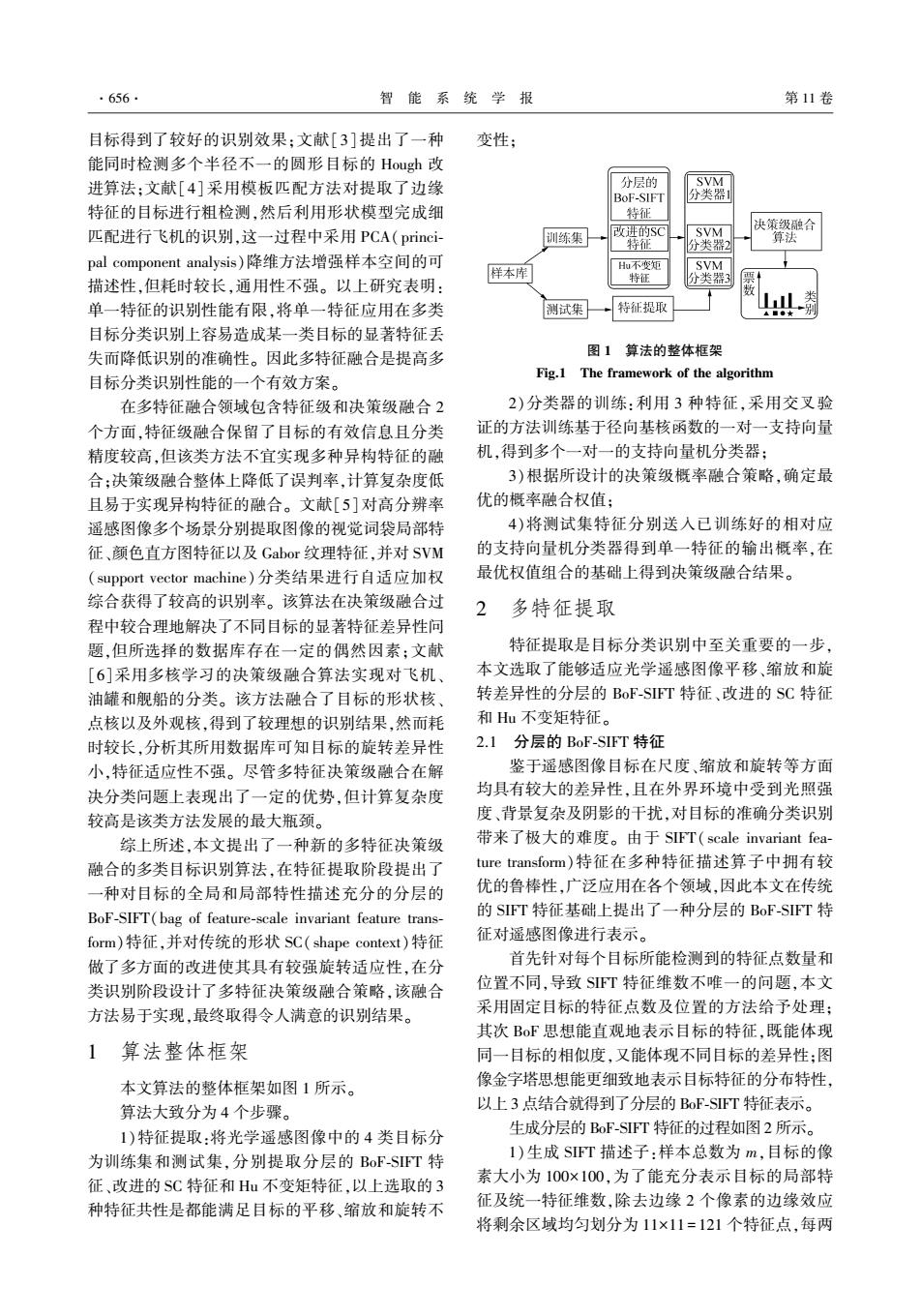
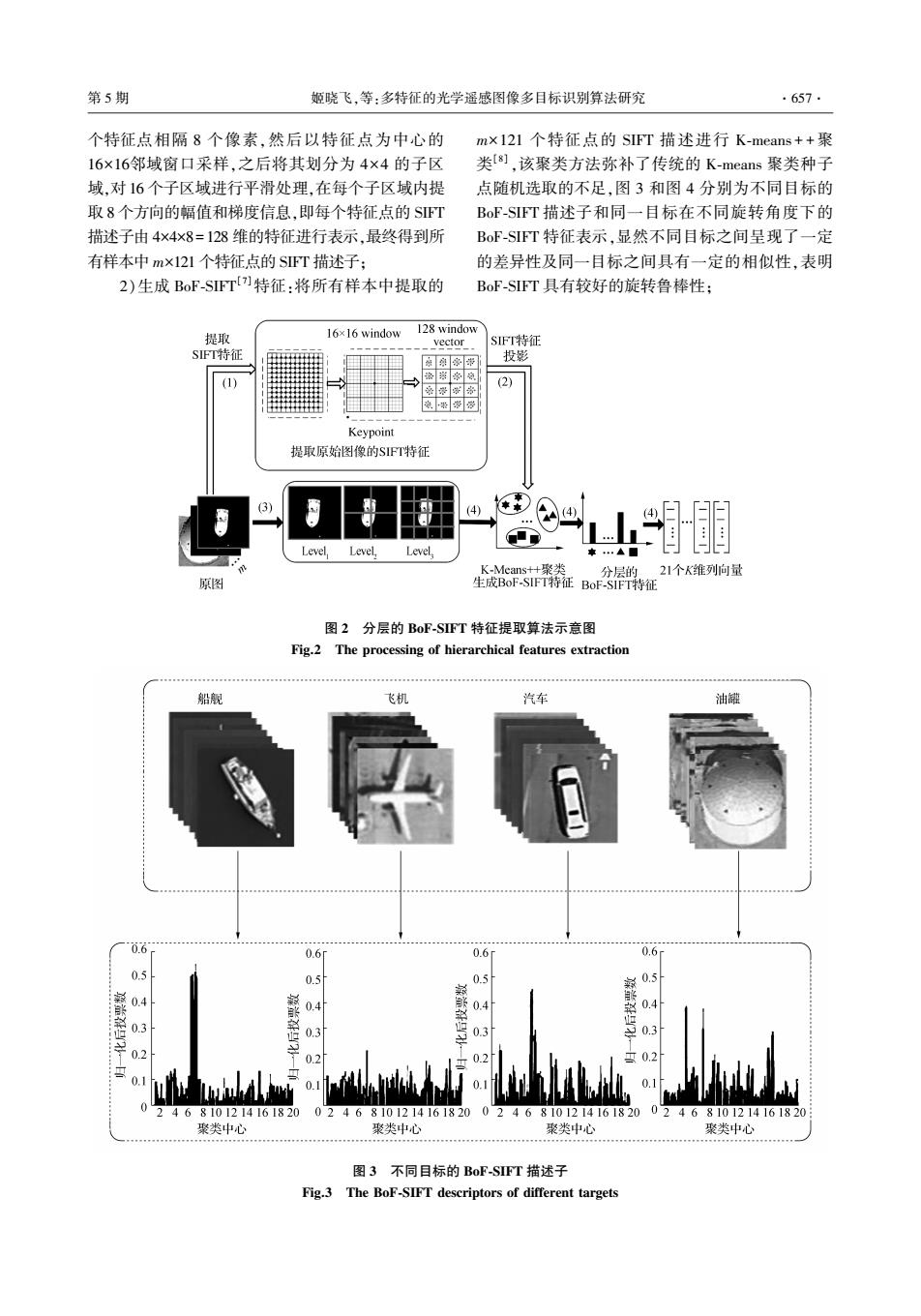
个特征点相隔 8 个像素,然后以特征点为中心的 16×16邻域窗口采样,之后将其划分为 4×4 的子区 域,对 16 个子区域进行平滑处理,在每个子区域内提 取 8 个方向的幅值和梯度信息,即每个特征点的 SIFT 描述子由 4×4×8= 128 维的特征进行表示,最终得到所 有样本中 m×121 个特征点的 SIFT 描述子; 2)生成 BoF⁃SIFT [7]特征:将所有样本中提取的 m×121 个特征点的 SIFT 描述进行 K⁃means + +聚 类[8] ,该聚类方法弥补了传统的 K⁃means 聚类种子 点随机选取的不足,图 3 和图 4 分别为不同目标的 BoF⁃SIFT 描述子和同一目标在不同旋转角度下的 BoF⁃SIFT 特征表示,显然不同目标之间呈现了一定 的差异性及同一目标之间具有一定的相似性,表明 BoF⁃SIFT 具有较好的旋转鲁棒性; 图 2 分层的 BoF⁃SIFT 特征提取算法示意图 Fig.2 The processing of hierarchical features extraction 图 3 不同目标的 BoF⁃SIFT 描述子 Fig.3 The BoF⁃SIFT descriptors of different targets 第 5 期 姬晓飞,等:多特征的光学遥感图像多目标识别算法研究 ·657·
·658. 智能系统学报 第11卷 0.6 0.6 0.6 0.5 0.5 0.5 04 0.4 0.4 0.3 03 03 0.2 0.2 0.1 0.1 n. 02468101214161820 02468101214161820 0246810121416182002468101214161820 聚类中心 聚类中心 聚类中心 聚类中心 图4同一目标的在不同旋转角度下的BoF-SIFT特征表示 Fig.4 The BoF-SIFT feature representation of the same target with different rotation angle 3)构造图像金字塔:将样本分成3层,第3 感图像的目标识别具备了较好的平移、旋转和缩放 层为整个样本,第2层划分为2×2个子块,第3层划 不变性。 分为4×4个子块,共有21个子块: 142 4)生成分层的BoF-SIFT特征:将金字塔中21 6 个子块的特征分别向K个聚类中心投影,得到21 个K维特征向量直方图。 角度区间 2.2改进的SC特征 (a)传统SC特征 31 13 SC特征o]又称为形状上下文,它是一种直观 12 ) 12 的特征表示,描述了所提取特征点到所有特征点的 32 矢量关系。对于具有目标大小和角度差异性的遥感 角度区间 图像,$C特征是不能很好地完成分类识别的本文在 (b)改进SC特征 传统SC特征算法基础上做了以下4点改进: 图5改进前后的SC特征对比 1)本文仅对采样点的中心生成描述符,这样能 Fig.5 The comparison between improved SC features 够很好地去除大量冗余信息,也能节省运行时间; and the traditional SC feature 2)对半径均匀划分,减弱传统对数极坐标半径 2.3Hu不变矩特征 的不均匀划分对采样点的密集度带来的影响: 3)统计所有采样点到中心点的距离,自动从中 H山不变矩)是通过计算图像的低阶(二阶和 选取最大的距离为极坐标的最大圆环半径,克服了 三阶)归一化中心矩进行非线性组合得到7个量 SC特征不具有缩放不变性的不足; 值,该特征满足平移、缩放和旋转不变性、计算速度 4)通过采样点到中心的距离找到目标的对称 快、对图像中较大目标识别较好。表1为本文4类 轴,并统一将其旋转到竖直方向,这一改进使提出的 遥感图像提取的Hu不变矩特征部分特征值表示。 SC特征具备了旋转适应性。图5为改进的SC特征 本文算法选取的3个特征在具有平移、缩放和 与传统的SC特征表示对比。从图5分析表明对原 旋转不变性这一共同的性质下利用各自的优势弥补 了互相的不足,分层的BoF-SIFT特征相比后2种对 图预处理后提取改进的SC特征,信息分布克服了 大量冗余信息的存在,缩短了运行时间,对于光学遥 图像背景的适应性强,不依赖于图像的预处理,并且
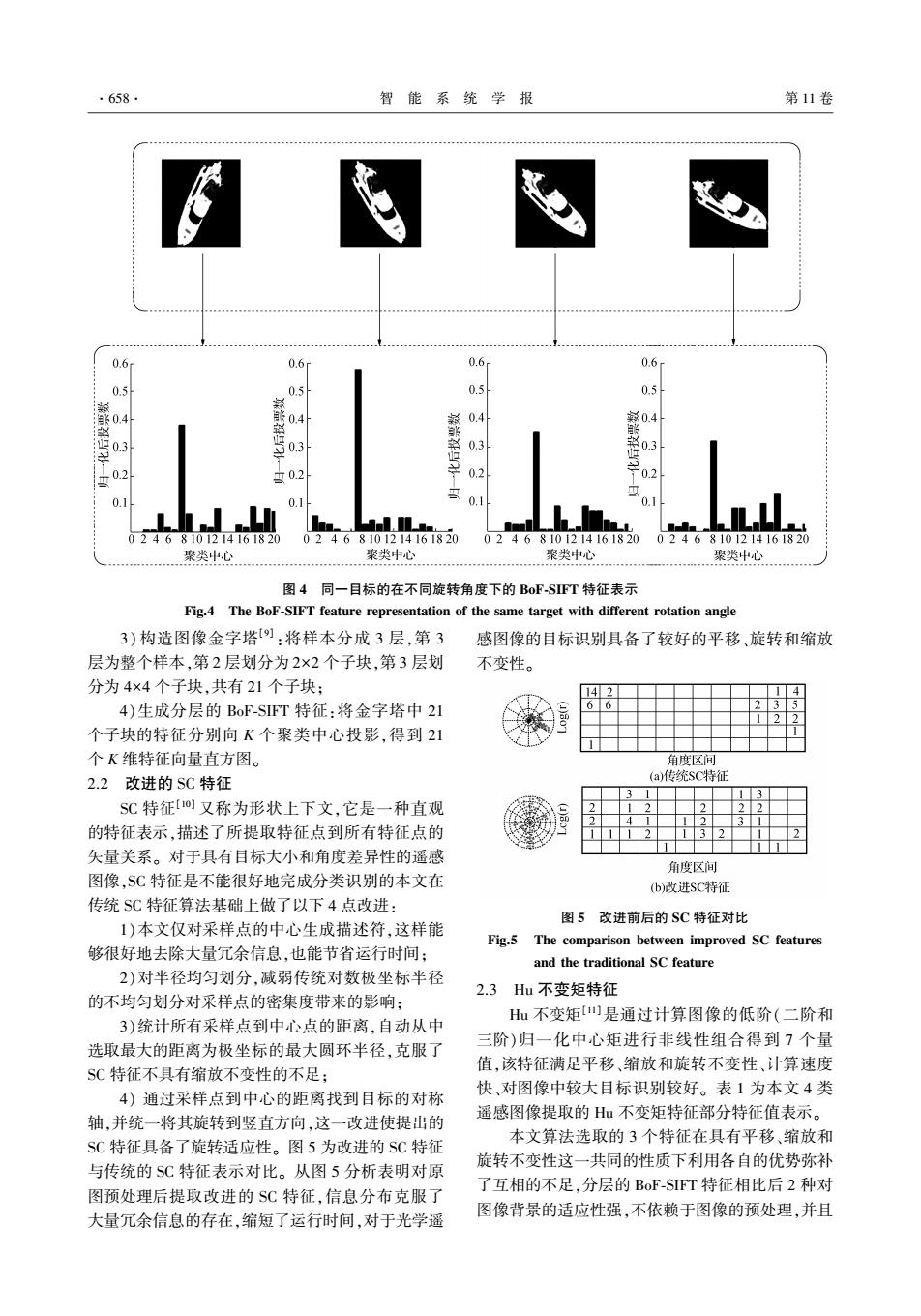
图 4 同一目标的在不同旋转角度下的 BoF⁃SIFT 特征表示 Fig.4 The BoF⁃SIFT feature representation of the same target with different rotation angle 3) 构造图像金字塔[9] :将样本分成 3 层,第 3 层为整个样本,第 2 层划分为 2×2 个子块,第 3 层划 分为 4×4 个子块,共有 21 个子块; 4)生成分层的 BoF⁃SIFT 特征:将金字塔中 21 个子块的特征分别向 K 个聚类中心投影,得到 21 个 K 维特征向量直方图。 2.2 改进的 SC 特征 SC 特征[10] 又称为形状上下文,它是一种直观 的特征表示,描述了所提取特征点到所有特征点的 矢量关系。 对于具有目标大小和角度差异性的遥感 图像,SC 特征是不能很好地完成分类识别的本文在 传统 SC 特征算法基础上做了以下 4 点改进: 1)本文仅对采样点的中心生成描述符,这样能 够很好地去除大量冗余信息,也能节省运行时间; 2)对半径均匀划分,减弱传统对数极坐标半径 的不均匀划分对采样点的密集度带来的影响; 3)统计所有采样点到中心点的距离,自动从中 选取最大的距离为极坐标的最大圆环半径,克服了 SC 特征不具有缩放不变性的不足; 4) 通过采样点到中心的距离找到目标的对称 轴,并统一将其旋转到竖直方向,这一改进使提出的 SC 特征具备了旋转适应性。 图 5 为改进的 SC 特征 与传统的 SC 特征表示对比。 从图 5 分析表明对原 图预处理后提取改进的 SC 特征,信息分布克服了 大量冗余信息的存在,缩短了运行时间,对于光学遥 感图像的目标识别具备了较好的平移、旋转和缩放 不变性。 图 5 改进前后的 SC 特征对比 Fig.5 The comparison between improved SC features and the traditional SC feature 2.3 Hu 不变矩特征 Hu 不变矩[11]是通过计算图像的低阶(二阶和 三阶)归一化中心矩进行非线性组合得到 7 个量 值,该特征满足平移、缩放和旋转不变性、计算速度 快、对图像中较大目标识别较好。 表 1 为本文 4 类 遥感图像提取的 Hu 不变矩特征部分特征值表示。 本文算法选取的 3 个特征在具有平移、缩放和 旋转不变性这一共同的性质下利用各自的优势弥补 了互相的不足,分层的 BoF⁃SIFT 特征相比后 2 种对 图像背景的适应性强,不依赖于图像的预处理,并且 ·658· 智 能 系 统 学 报 第 11 卷

第5期 姬晓飞,等:多特征的光学遥感图像多目标识别算法研究 ·659. 对细节分布描述充分,改进之后的SC特征对形状 图6为4类样本情况下一对一分类法的结构示 的描述体现了一定的优势,Hu不变矩特征提取简单 意图,4类样本可以构造6个分类器,同时获得6个 且快速。 判别函数,当对未知样本测试时,每一个判别函数会 表1Hu不变矩特征部分表示 Table 1 Part of Hu invariant moments feature value 给出一个结果,将6个结果投票,投票最多的即为该 未知样本的测试类别。 目标 Hu不变矩特征 3.2决策级融合 图像数据1数据2数据3数据4数据5数据6数据7 由于本文所提取的3种特征的维数相差较大, 船舰282x10r3394x10679x10643x10P4210r”1Ix1T261x10r 不利于在特征级进行融合。为了解决异构特征的融 飞机188x10C37.141C'188x10281CP20K109205x10B174K10 合问题,提出了一种新的多特征决策级融合策略 (本文数据库中含有4类样本),该策略通过对训练 汽车116×103525×1GT'156x1CP20x1010Dx1027.78x105461×10 集样本的分类准确率交叉验证可以训练得到每种特 油罐219x103150×101641G307×1G211×1020D10501×10 征对应的6个基于径向基核函数的一对一SVM分 3 识别算法 类器。通过上述的投票法可以分别获得3种特征对 于训练样本的目标识别概率。以一定步长遍历所有 支持向量机(support vector machine,SVM)[2] 可能选择的权值,使训练样本的识别准确率最高来 在解决小样本、非线性及高维模式识别中表现出了 许多特有的优势,具有通用性、鲁棒性、有效性、计算 确定最优融合权值。该识别方法实现简单,识别率 简单和理论完善等优点。 较单一特征有了较大的提高,达到了预期效果。其 3.1多类支持向量机分类算法 中决策级融合及最优权值确定过程如图7所示。 支持向量机本身是个两类问题的判别方法,本 其中i=1,2,3,4表示4类目标,每一类目标含 文采用最常用的一对一分类法[),该方法是在每两 有k个样本:j=1,2,3表示3种特征,决策级融合及 类间训练一个分类器,即将训练集(k个不同类别) 最优权值的确定由以下3步实现: 构造为P=k(k-1)2个分类器,分别对每一个组合 1)对所有训练样本分别计算3种特征对应的 采用求解两类问题的SVM进行分类,最终求得P个 判别函数,当对测试集中的未知样本进行分类时,每 P:、P表示每一个样本提取第j个特征后属于第i类 个分类器都会根据判别函数对其类别进行判断,并 目标的概率; 为相应的类别投上一票,最后得票最多的类别即作 2)设a表示第j个特征的权重,α的选取要求 为该未知样本的类别,当两个类别具有同样多的票 数时则选择类别标签较小的一类作为样本的类别, 满足∑4,=1。当给定一组%时,计算得到每一个 j=1 这种策略称为“投票法” 样本属于第i类目标的概率P,=∑a,P,; A.B.C,D j=1 3)统计每一类样本的正确分类数n:,即计算每 一个样本的i=max{P,P2,P,P4},将该样本预测 aVsO AVSD BVsC BVsD 类别定义为第i类,比较预测类别和真实类别,相同 " …2 则置为1,不同则置为0。对应所有训练样本的总识 数 别率P定义为P=(立)/4)。 ABCD类别 重复2)、3),遍历所有可能的α心组合,得到对 类别决策 应不同权值时的训练样本的总识别率。选取训练样 图6一对一分类法结构示意图 本识别率最高时的权值组合作为最优权值,用于对 Fig.6 The schematic of OVO SVM 测试样本的最终加权融合识别
对细节分布描述充分,改进之后的 SC 特征对形状 的描述体现了一定的优势,Hu 不变矩特征提取简单 且快速。 表 1 Hu 不变矩特征部分表示 Table 1 Part of Hu invariant moments feature value 目标 图像 Hu 不变矩特征 数据 1 数据 2 数据 3 数据 4 数据 5 数据 6 数据 7 船舰 2.82×10 -3 3.94×10 -6 6.79×10 -9 6.43×10 -9 4.24×10 -17 1.27×10 -11 2.61×10 -18 飞机 1.88×10 -3 7.14×10 -7 1.88×10 -9 2.82×10 -10 2.04×10 -19 2.05×10 -13 1.74×10 -20 汽车 1.16×10 -3 5.25×10 -7 1.56×10 -10 200×10 -11 1.02×10 -21 7.78×10 -15 4.61×10 -22 油罐 2.19×10 -3 1.50×10 -8 1.64×10 -11 3.07×10 -10 2.11×10 -20 2.02×10 -14 5.01×10 -21 3 识别算法 支持向量机( support vector machine, SVM) [12] 在解决小样本、非线性及高维模式识别中表现出了 许多特有的优势,具有通用性、鲁棒性、有效性、计算 简单和理论完善等优点。 3.1 多类支持向量机分类算法 支持向量机本身是个两类问题的判别方法,本 文采用最常用的一对一分类法[13] ,该方法是在每两 类间训练一个分类器,即将训练集(k 个不同类别) 构造为 P = k(k-1) / 2 个分类器,分别对每一个组合 采用求解两类问题的 SVM 进行分类,最终求得 P 个 判别函数,当对测试集中的未知样本进行分类时,每 个分类器都会根据判别函数对其类别进行判断,并 为相应的类别投上一票,最后得票最多的类别即作 为该未知样本的类别,当两个类别具有同样多的票 数时则选择类别标签较小的一类作为样本的类别, 这种策略称为“投票法”。 图 6 一对一分类法结构示意图 Fig.6 The schematic of OVO SVM 图 6 为 4 类样本情况下一对一分类法的结构示 意图,4 类样本可以构造 6 个分类器,同时获得 6 个 判别函数,当对未知样本测试时,每一个判别函数会 给出一个结果,将 6 个结果投票,投票最多的即为该 未知样本的测试类别。 3.2 决策级融合 由于本文所提取的 3 种特征的维数相差较大, 不利于在特征级进行融合。 为了解决异构特征的融 合问题,提出了一种新的多特征决策级融合策略 (本文数据库中含有 4 类样本),该策略通过对训练 集样本的分类准确率交叉验证可以训练得到每种特 征对应的 6 个基于径向基核函数的一对一 SVM 分 类器。 通过上述的投票法可以分别获得 3 种特征对 于训练样本的目标识别概率。 以一定步长遍历所有 可能选择的权值,使训练样本的识别准确率最高来 确定最优融合权值。 该识别方法实现简单,识别率 较单一特征有了较大的提高,达到了预期效果。 其 中决策级融合及最优权值确定过程如图 7 所示。 其中 i = 1,2,3,4 表示 4 类目标,每一类目标含 有 k 个样本;j = 1,2,3 表示 3 种特征,决策级融合及 最优权值的确定由以下 3 步实现: 1)对所有训练样本分别计算 3 种特征对应的 Pij、Pij表示每一个样本提取第 j 个特征后属于第 i 类 目标的概率; 2)设 αj 表示第 j 个特征的权重,αj 的选取要求 满足 ∑ 3 j = 1 αj = 1。 当给定一组 αj 时,计算得到每一个 样本属于第 i 类目标的概率 Pi = ∑ 3 j = 1 αjPij ; 3)统计每一类样本的正确分类数 ni,即计算每 一个样本的 i = max{P1 ,P2 ,P3 ,P4 },将该样本预测 类别定义为第 i 类,比较预测类别和真实类别,相同 则置为 1,不同则置为 0。 对应所有训练样本的总识 别率 P 定义为 P = (∑ 4 i = 1 ni) / (4k) 。 重复 2)、3),遍历所有可能的 αj 组合,得到对 应不同权值时的训练样本的总识别率。 选取训练样 本识别率最高时的权值组合作为最优权值,用于对 测试样本的最终加权融合识别。 第 5 期 姬晓飞,等:多特征的光学遥感图像多目标识别算法研究 ·659·