蝗虫抓附及跳跃的运动力学测试与建模分析 以生物体为对象,进行大量的运动力学和行为的测试测量工作,通过力学建模的方法对其进行 力学分析,是仿生机械和仿生机器人研究的基础,研究它们对仿生机械学的发展有重要的意义。 假定地球地平面外法线方向为正,那么地面、墙面和天花板分别对应正表面、零表面和负 表面。能够自由地在这些表面上运动的动物简称为TDOF(Three Dimensional--terrain Obstacle Fre)动物。蝗虫和树蛙、壁虎等动物都属于TDOF的典型动物,因此对蝗虫的研究更具有代 表意义。 蝗虫是一种既可以飞行,又可以在地面、植物茎叶等不同表面上自由灵活运动的昆虫,它 超凡的运动能力成为特种机器人研制和仿生的对象。科学家以蝗虫的这种运动能力为研究模仿 对象,研制出了各种爬壁机器人。爬壁机器人在民用、军事、航天上具有广泛的用途,因而越 来越受到人们的重视。在民用领域,爬壁机器人被用来清洗大厦外壁墙面和玻璃、检测舰船船 体、检测核密封罐等:在军事反恐领域,爬壁机器人可用来进行侦察窃听、研制蛙人等:在航 天领域,爬壁机器人可用来进行舱外维修等。 1.2.2国内外研究状况 多年来,随着科学和技术的发展,科学家、工程师通过多学科之间的相互合作交流,利用 各种实验、计算、理论手段研究不同动物的运动力学机理。通过学习和借鉴,用于启发研制新 型工业产品,尤其仿生机器人越来越受到人们的关注。通过建立相关的理论和模型,动物运动 力学的研究空前的发展,取得了很多重大的成果。 运动力学研究: 在四足匍匐运动动物当中,壁虎以其高超的运动能力被广泛的研究,Zaf等主要研究了不 同种类壁虎的运动行为和壁虎与其生存环境间的相互适应性8):王周义等对以虎纹捕鸟蛛为对 象的八足动物的运动力学及行为进行了研究,深入探讨了其各个步足功能及质心运动规律9。 Pter等测得了一种有袋小鼠在不同运动速度下的步态变化,并且利用高速摄像技术记录了小鼠 在不同步态下身体躯干的弯曲情况,发现小鼠身体有很显著的侧向弯曲,而轴向的弯曲很小, 随着运动速度的提高,到达小跑状态时小鼠的躯干侧向弯曲量变小0。王周义等研究了大壁虎 在天花板运动时的运动反力,分析了壁虎在天花板表面爬行的运动规律,描述了大壁虎的运动 学特性,并对其动力学特征做了部分相关的论述。2006年Autumn等提出了一种新的接触面 摩擦粘附模型,用于解释壁虎单脚趾粘附到脱附的临界角2.2000年Dickinson等提出了一中 阐述动物运动的综合化的观点,通过神经控制、肌肉作用机理、力学传达、反馈调节、自然环 境等角度对动物的运动进行了阐述。 仿生机器人研制: 蝗虫、树蛙等可以在复杂空间自如地爬行越障。科研人员希望通过了解昆虫的运动机理, 2
蝗虫抓附及跳跃的运动力学测试与建模分析 2 以生物体为对象,进行大量的运动力学和行为的测试测量工作,通过力学建模的方法对其进行 力学分析,是仿生机械和仿生机器人研究的基础,研究它们对仿生机械学的发展有重要的意义。 假定地球地平面外法线方向为正,那么地面、墙面和天花板分别对应正表面、零表面和负 表面。能够自由地在这些表面上运动的动物简称为 TDOF(Three Dimensional-terrain Obstacle Free)动物。蝗虫和树蛙、壁虎等动物都属于 TDOF 的典型动物,因此对蝗虫的研究更具有代 表意义。 蝗虫是一种既可以飞行,又可以在地面、植物茎叶等不同表面上自由灵活运动的昆虫,它 超凡的运动能力成为特种机器人研制和仿生的对象。科学家以蝗虫的这种运动能力为研究模仿 对象,研制出了各种爬壁机器人。爬壁机器人在民用、军事、航天上具有广泛的用途,因而越 来越受到人们的重视。在民用领域,爬壁机器人被用来清洗大厦外壁墙面和玻璃、检测舰船船 体、检测核密封罐等;在军事反恐领域,爬壁机器人可用来进行侦察窃听、研制蛙人等;在航 天领域,爬壁机器人可用来进行舱外维修等。 1.2.2 国内外研究状况 多年来,随着科学和技术的发展,科学家、工程师通过多学科之间的相互合作交流,利用 各种实验、计算、理论手段研究不同动物的运动力学机理。通过学习和借鉴,用于启发研制新 型工业产品,尤其仿生机器人越来越受到人们的关注。通过建立相关的理论和模型,动物运动 力学的研究空前的发展,取得了很多重大的成果。 运动力学研究: 在四足匍匐运动动物当中,壁虎以其高超的运动能力被广泛的研究,Zaaf 等主要研究了不 同种类壁虎的运动行为和壁虎与其生存环境间的相互适应性[7-8];王周义等对以虎纹捕鸟蛛为对 象的八足动物的运动力学及行为进行了研究,深入探讨了其各个步足功能及质心运动规律[9]。 Peter 等测得了一种有袋小鼠在不同运动速度下的步态变化,并且利用高速摄像技术记录了小鼠 在不同步态下身体躯干的弯曲情况,发现小鼠身体有很显著的侧向弯曲,而轴向的弯曲很小, 随着运动速度的提高,到达小跑状态时小鼠的躯干侧向弯曲量变小[10]。王周义等研究了大壁虎 在天花板运动时的运动反力,分析了壁虎在天花板表面爬行的运动规律,描述了大壁虎的运动 学特性,并对其动力学特征做了部分相关的论述[11]。2006 年 Autumn 等提出了一种新的接触面 摩擦粘附模型,用于解释壁虎单脚趾粘附到脱附的临界角[12]。2000 年 Dickinson 等提出了一中 阐述动物运动的综合化的观点,通过神经控制、肌肉作用机理、力学传达、反馈调节、自然环 境等角度对动物的运动进行了阐述[13]。 仿生机器人研制: 蝗虫、树蛙等可以在复杂空间自如地爬行越障。科研人员希望通过了解昆虫的运动机理
南京航空航天大学硕士学位论文 来研制出能够在三维空间自如运动的仿生机器人。陈勇等人借助于机械系统动力学仿真软件 ADAMS的虚拟样机技术,建立了仿蝗虫机器人的机构模型,通过运动力学仿真计算,分析了 蝗虫弹跳过程中的力学与运动学参数的变化规律,讨论了仿蝗虫机器人的跳跃特性,获得了机 器人模型所需的最优结构参数1。浙江理工大学机电研究所使用Adams联合ProE结构造型的 四足仿生机器人结构进行了仿真分析。哈尔滨工业大学的郁万春等对蝗虫的结构特性与弹跳 机理进行了分析研究,建立了仿蝗虫机器人杆件弹跳模型,并将双弹簧双质量模型用于起跳阶 段得出了跳跃高度与跳跃力的数学方程表达式1。上海交通大学的杨绘宇等建立了仿蝗虫间歇 跳跃机器人的机构模型。使用关节轨迹规划的方法,分析了起跳过程中各杆件的姿态变化,并 对其起跳过程进行了仿真。Ful等对蜚蠊的运动力学进行了深入研究,结合蜚蠊的运动行为 研究提出了六足机器人弹簧腿模型I8-19,。Daniel、Full等通过对比壁虎与蜚蠊在竖直墙面爬行抓 附力作用方式,建立动力学模型,启发RSE机器人的研制0。美国凯斯西储大学的研究人员 掌握了蜚蠊的运动机制之后,研制了一种仿蜚蠊两栖机器人,该机器人具有优越的全地形适应 性。Chen研究发现,匍匐运动状态下的壁虎不同腿的功能和昆虫很类似,而和其他一些直立 的四足动物有显著区别22。Cao等基于对壁虎爬行的理论和实验研究,启发设计了两种爬壁 机器人。该系统可以在65°斜坡上以20mm/s的速度爬行,且易于进行二次开发21。 动物与接触面的附着方式: 机械锁合、软垫贴附和刚毛粘附是动物在运动表面稳定运动的三种典型接触方式242,其 中机械锁合与软垫贴附在昆虫运动中较为常见2,28),如蝗虫、甲虫等。甲虫脚爪与特定粗糙水 平面的抓附特性与脚爪的几何形态、脚爪材料和接触表面间的摩擦系数有密切的关系2。蜜蜂 的柔性垫子接触依靠肌肉的收缩在接触面间形成负压,从而实现吸附0。苍蝇能够通过6条腿 在三维空间自由运动。测试结果发现脚垫的切向力远大于法向力(约为4倍),表明切向力在苍蝇 的稳定附着中占据十分重要的作用3)。树栖蚂蚁在光滑平面上的抓附力高达自身的重量的40~ 150倍。蚂蚁垫子在行走时主动地随爪子屈肌的收缩而伸展,或者被动地随足向身体拖动时 伸展)。蝗虫脚垫平面内的沟槽可以向外分泌体液,通过体液的粘附力增强对接触面的粘附能 力B4。蝗虫脚垫的特殊结构有利于大幅度降低接触刚度,增加接触面积,并产生方向相反的摩 擦力,该摩擦力有助于提高接触的稳定性3。 1.3本文的主要工作 本文是在南航仿生所多年开展动物运动仿生学研究及实验设备的基础上,开展蝗虫抓附与 弹跳运动力学测试仪的研制。利用研制的设备,我们研究了蝗虫在不同粗糙度斜面上的抓附机 制和蝗虫弹跳运动力学。蝗虫运动力学测试系统是以三维力传感器阵列为核心,由信号调理及 数据采集系统、图形采集与处理系统组成,专门用于测量蝗虫运动过程中脚掌与表面接触的三 3
南京航空航天大学硕士学位论文 3 来研制出能够在三维空间自如运动的仿生机器人。陈勇等人借助于机械系统动力学仿真软件 ADAMS 的虚拟样机技术,建立了仿蝗虫机器人的机构模型,通过运动力学仿真计算,分析了 蝗虫弹跳过程中的力学与运动学参数的变化规律,讨论了仿蝗虫机器人的跳跃特性,获得了机 器人模型所需的最优结构参数[14]。浙江理工大学机电研究所使用 Adams 联合 ProE 结构造型的 四足仿生机器人结构进行了仿真分析[15]。哈尔滨工业大学的郁万春等对蝗虫的结构特性与弹跳 机理进行了分析研究,建立了仿蝗虫机器人杆件弹跳模型,并将双弹簧双质量模型用于起跳阶 段得出了跳跃高度与跳跃力的数学方程表达式[16]。上海交通大学的杨绘宇等建立了仿蝗虫间歇 跳跃机器人的机构模型。使用关节轨迹规划的方法,分析了起跳过程中各杆件的姿态变化,并 对其起跳过程进行了仿真[17]。Full 等对蜚蠊的运动力学进行了深入研究,结合蜚蠊的运动行为 研究提出了六足机器人弹簧腿模型[18-19]。Daniel、Full 等通过对比壁虎与蜚蠊在竖直墙面爬行抓 附力作用方式,建立动力学模型,启发 RiSE 机器人的研制[20]。美国凯斯西储大学的研究人员 掌握了蜚蠊的运动机制之后,研制了一种仿蜚蠊两栖机器人,该机器人具有优越的全地形适应 性[21]。Chen 研究发现,匍匐运动状态下的壁虎不同腿的功能和昆虫很类似,而和其他一些直立 的四足动物有显著区别[22]。Carlo 等基于对壁虎爬行的理论和实验研究,启发设计了两种爬壁 机器人。该系统可以在 65°斜坡上以 20mm/s 的速度爬行,且易于进行二次开发[23]。 动物与接触面的附着方式: 机械锁合、软垫贴附和刚毛粘附是动物在运动表面稳定运动的三种典型接触方式[24-26],其 中机械锁合与软垫贴附在昆虫运动中较为常见[27,28],如蝗虫、甲虫等。甲虫脚爪与特定粗糙水 平面的抓附特性与脚爪的几何形态、脚爪材料和接触表面间的摩擦系数有密切的关系[29]。蜜蜂 的柔性垫子接触依靠肌肉的收缩在接触面间形成负压, 从而实现吸附[30]。苍蝇能够通过 6 条腿 在三维空间自由运动。测试结果发现脚垫的切向力远大于法向力(约为 4 倍), 表明切向力在苍蝇 的稳定附着中占据十分重要的作用[31]。树栖蚂蚁在光滑平面上的抓附力高达自身的重量的 40~ 150 倍[32]。蚂蚁垫子在行走时主动地随爪子屈肌的收缩而伸展, 或者被动地随足向身体拖动时 伸展[33]。蝗虫脚垫平面内的沟槽可以向外分泌体液, 通过体液的粘附力增强对接触面的粘附能 力[34]。蝗虫脚垫的特殊结构有利于大幅度降低接触刚度,增加接触面积,并产生方向相反的摩 擦力,该摩擦力有助于提高接触的稳定性[35]。 1.3 本文的主要工作 本文是在南航仿生所多年开展动物运动仿生学研究及实验设备的基础上,开展蝗虫抓附与 弹跳运动力学测试仪的研制。利用研制的设备,我们研究了蝗虫在不同粗糙度斜面上的抓附机 制和蝗虫弹跳运动力学。蝗虫运动力学测试系统是以三维力传感器阵列为核心,由信号调理及 数据采集系统、图形采集与处理系统组成,专门用于测量蝗虫运动过程中脚掌与表面接触的三
蝗虫抓附及跳跃的运动力学测试与建模分析 维接触力,并得到实时的运动影像资料。 本文的内容主要分为以下几部分: 第一章课题研究的主要介绍,包括仿生学及研究现状,对动物运动力学、仿生机器人、动 物与接触面的附着机制等进行阐述。在此基础上提出了本文的研究背景、意义、方法和内容。 第二章对蝗虫运动力学测试方法的介绍。实验对象蝗虫的基本介绍及腿和跗节结构的阐述。 蝗虫斜面抓附力与行为测试设备和蝗虫弹跳力与行为测试设备的介绍。实验流程介绍及数据处 理方法。 第三章是对蝗虫在粗糙斜面上的抓附机制进行研究。根据蝗虫在不同粗糙度斜面脱附的录 像,获得蝗虫能够稳定抓附的最大斜面角度(脱附角),且使用三维力传感器测得蝗虫脱附时的 切向抓附力与法向抓附力,用于衡量蝗虫的斜面抓附能力。为了研究蝗虫斜面抓附的机理,对 蝗虫身体及跗节的抓附形态进行了观察并通过显微镜拍摄获得蝗虫脚爪尖端和砂纸表面形貌。 发现在粗糙斜面上蝗虫身体的抓附形态随着斜面角度增大存在明显动态转换,跗节的脚爪及部 分垫子与表面接触,脚爪尖端与表面颗粒近似为球形。通过对蝗虫跗节脚爪与垫子结构及作用 方式的分析并结合实验结果推断蝗虫在粒度为15.3-40.5μm的粗糙斜面抓附时,垫子与表面之 间的摩擦力较小,而脚爪与表面颗粒的机械锁合力对支撑身体起到了关键性的作用。在以上实 验结果及分析基础上建立的蝗虫粗糙斜面抓附模型解释了:粗糙的表面有利于蝗虫稳定抓附: 脚爪作用力中切向抓附力大于法向抓附力,且切向抓附力在蝗虫稳定抓附中起到十分重要的作 用 第四章是蝗虫脚爪抓附力学模型及稳定性分析。列出力学平衡方程,建立数学模型,并在 Matlab软件中进行数值求解。研究影响蝗虫脚爪抓附力和系统稳定性的因素,对抓附力和影响 因子关系曲线进行分析讨论 第五章是蝗虫弹跳力与运动轨迹控制研究。本章研究了蝗虫的弹跳力学和运动行为,我们 使用高速摄像机记录了蝗虫跳跃过程中的运动行为,使用测力传感器记录了蝗虫后腿的弹跳力。 通过对这些数据的分析来研究蝗虫的跳跃机制。研究结果发现蝗虫的跳跃方向是通过身体的快 速滚转和偏航实现的。这个过程前腿和中腿主要在竖起和压缩阶段起到驱动作用,而后腿主要 在触发阶段起到驱动作用。最终的跳跃方向是在后腿离开地面后才确定的。两后腿的水平内聚 冲量对于蝗虫跳跃的稳定性和精确度具有重要意义。另外,蝗虫两个后腿的夹角影响了蝗虫跳 跃方向但对跳跃仰角的影响较小。这说明蝗虫的跳跃仰角是由蝗虫后腿的初始位置决定的。 第六章是全文的总结和课题研究展望。总结了本文所做的工作和获得的结论,分析了文中 的不足,提出了继续研究的方向和目标。 4
蝗虫抓附及跳跃的运动力学测试与建模分析 4 维接触力,并得到实时的运动影像资料。 本文的内容主要分为以下几部分: 第一章课题研究的主要介绍,包括仿生学及研究现状,对动物运动力学、仿生机器人、动 物与接触面的附着机制等进行阐述。在此基础上提出了本文的研究背景、意义、方法和内容。 第二章对蝗虫运动力学测试方法的介绍。实验对象蝗虫的基本介绍及腿和跗节结构的阐述。 蝗虫斜面抓附力与行为测试设备和蝗虫弹跳力与行为测试设备的介绍。实验流程介绍及数据处 理方法。 第三章是对蝗虫在粗糙斜面上的抓附机制进行研究。根据蝗虫在不同粗糙度斜面脱附的录 像,获得蝗虫能够稳定抓附的最大斜面角度(脱附角),且使用三维力传感器测得蝗虫脱附时的 切向抓附力与法向抓附力,用于衡量蝗虫的斜面抓附能力。为了研究蝗虫斜面抓附的机理,对 蝗虫身体及跗节的抓附形态进行了观察并通过显微镜拍摄获得蝗虫脚爪尖端和砂纸表面形貌。 发现在粗糙斜面上蝗虫身体的抓附形态随着斜面角度增大存在明显动态转换,跗节的脚爪及部 分垫子与表面接触,脚爪尖端与表面颗粒近似为球形。通过对蝗虫跗节脚爪与垫子结构及作用 方式的分析并结合实验结果推断蝗虫在粒度为 15.3-40.5µm 的粗糙斜面抓附时,垫子与表面之 间的摩擦力较小,而脚爪与表面颗粒的机械锁合力对支撑身体起到了关键性的作用。在以上实 验结果及分析基础上建立的蝗虫粗糙斜面抓附模型解释了:粗糙的表面有利于蝗虫稳定抓附; 脚爪作用力中切向抓附力大于法向抓附力,且切向抓附力在蝗虫稳定抓附中起到十分重要的作 用 第四章是蝗虫脚爪抓附力学模型及稳定性分析。列出力学平衡方程,建立数学模型,并在 Matlab 软件中进行数值求解。研究影响蝗虫脚爪抓附力和系统稳定性的因素,对抓附力和影响 因子关系曲线进行分析讨论 第五章是蝗虫弹跳力与运动轨迹控制研究。本章研究了蝗虫的弹跳力学和运动行为,我们 使用高速摄像机记录了蝗虫跳跃过程中的运动行为,使用测力传感器记录了蝗虫后腿的弹跳力。 通过对这些数据的分析来研究蝗虫的跳跃机制。研究结果发现蝗虫的跳跃方向是通过身体的快 速滚转和偏航实现的。这个过程前腿和中腿主要在竖起和压缩阶段起到驱动作用,而后腿主要 在触发阶段起到驱动作用。最终的跳跃方向是在后腿离开地面后才确定的。两后腿的水平内聚 冲量对于蝗虫跳跃的稳定性和精确度具有重要意义。另外,蝗虫两个后腿的夹角影响了蝗虫跳 跃方向但对跳跃仰角的影响较小。这说明蝗虫的跳跃仰角是由蝗虫后腿的初始位置决定的。 第六章是全文的总结和课题研究展望。总结了本文所做的工作和获得的结论,分析了文中 的不足,提出了继续研究的方向和目标

南京航空航天大学硕士学位论文 第二章蝗虫运动力学测试方法 2.1实验材料 东亚飞蝗Locusta migratoria manilensis(Meyen),属直翅目,蝗科。雄成虫体长33~48毫 米,雌成虫体长39~52毫米,有群居型、散居型和中间型三种类型,体灰黄褐色(群居型)或头、 胸、后足带绿色(散居型)。头顶圆。颜面平直,触角丝状,前胸背板中降线发达,沿中线两侧 有黑色带纹。前翅淡褐色,有暗色斑点翅长超过后足股节2倍以上(群居型)或不到2倍(散居型)。 胸部腹面有长而密的细绒毛,后足股节内侧基半部在上、下降线之间呈黑色。第五龄蝗蝻体长 26~40毫米,触角22~23节,翅节长达第四、五腹节,群居型体长红褐色,散居型体色较浅, 在绿色植物多的地方为绿色。 图2.1东亚飞蝗 2.1.1蝗虫的腿结构 蝗虫的身体表面有坚硬的外骨骼,用来保护和支撑内部的柔软器官、防止体内水分的蒸发。 蝗虫的身体由许多体节构成,全身分为头、胸、腹三部分,其中胸部是蝗虫的运动中心,分为 前胸、中胸和后胸。在蝗虫的前、中和后胸各有一对足,称为前足、中足和后足。这三对足尺 寸差异很大B,但是结构基本相同。后足相对发达,主要用于弹跳:前、中足较弱,适合爬行。 蝗虫的足由基节、转节、股节、胫节和跗节组成,各节之间由关节相连并实现相对运动,如图 2.2。Burrows等研究发现B刃,在蝗虫后足股节与胫节的连接处有一个半月板结构,蝗虫跳跃时 的能量来自这个半月板结构和腿节中的肌肉。腿部有两块肌肉:伸肌和屈肌,它们分别起到了 使腿伸展和收缩的作用。 5
南京航空航天大学硕士学位论文 5 第二章 蝗虫运动力学测试方法 2.1 实验材料 东亚飞蝗 Locusta migratoria manilensis (Meyen) ,属直翅目,蝗科。雄成虫体长 33~48 毫 米,雌成虫体长 39~52 毫米,有群居型、散居型和中间型三种类型,体灰黄褐色(群居型)或头、 胸、后足带绿色(散居型)。头顶圆。颜面平直,触角丝状,前胸背板中降线发达,沿中线两侧 有黑色带纹。前翅淡褐色,有暗色斑点翅长超过后足股节 2 倍以上(群居型)或不到 2 倍(散居型)。 胸部腹面有长而密的细绒毛,后足股节内侧基半部在上、下降线之间呈黑色。第五龄蝗蝻体长 26~40 毫米,触角 22~23 节,翅节长达第四、五腹节,群居型体长红褐色,散居型体色较浅, 在绿色植物多的地方为绿色。 图 2. 1 东亚飞蝗 2.1.1 蝗虫的腿结构 蝗虫的身体表面有坚硬的外骨骼,用来保护和支撑内部的柔软器官、防止体内水分的蒸发。 蝗虫的身体由许多体节构成,全身分为头、胸、腹三部分,其中胸部是蝗虫的运动中心,分为 前胸、中胸和后胸。在蝗虫的前、中和后胸各有一对足,称为前足、中足和后足。这三对足尺 寸差异很大[36],但是结构基本相同。后足相对发达,主要用于弹跳;前、中足较弱,适合爬行。 蝗虫的足由基节、转节、股节、胫节和跗节组成,各节之间由关节相连并实现相对运动,如图 2.2。Burrows 等研究发现[37],在蝗虫后足股节与胫节的连接处有一个半月板结构,蝗虫跳跃时 的能量来自这个半月板结构和腿节中的肌肉。腿部有两块肌肉:伸肌和屈肌,它们分别起到了 使腿伸展和收缩的作用
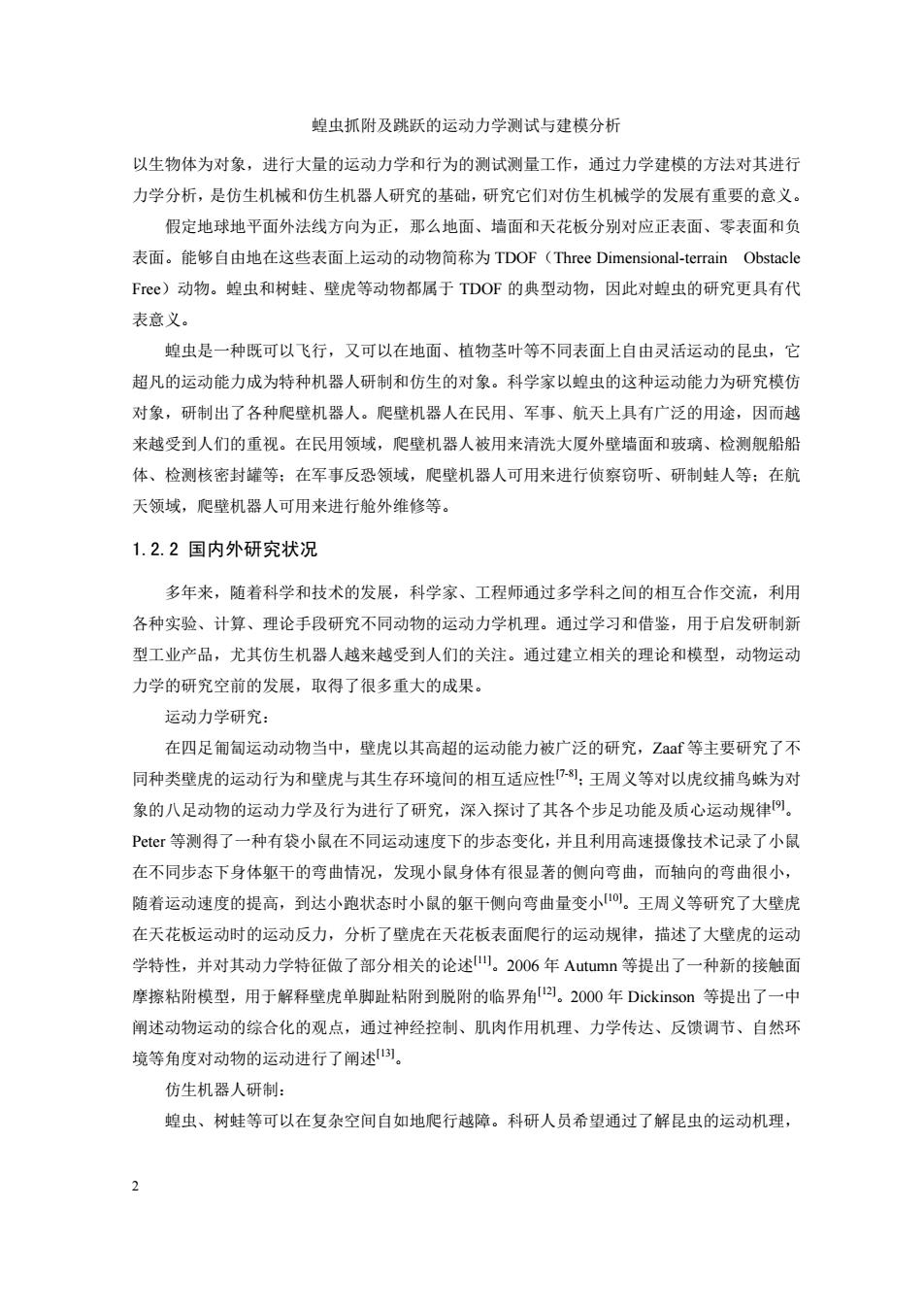
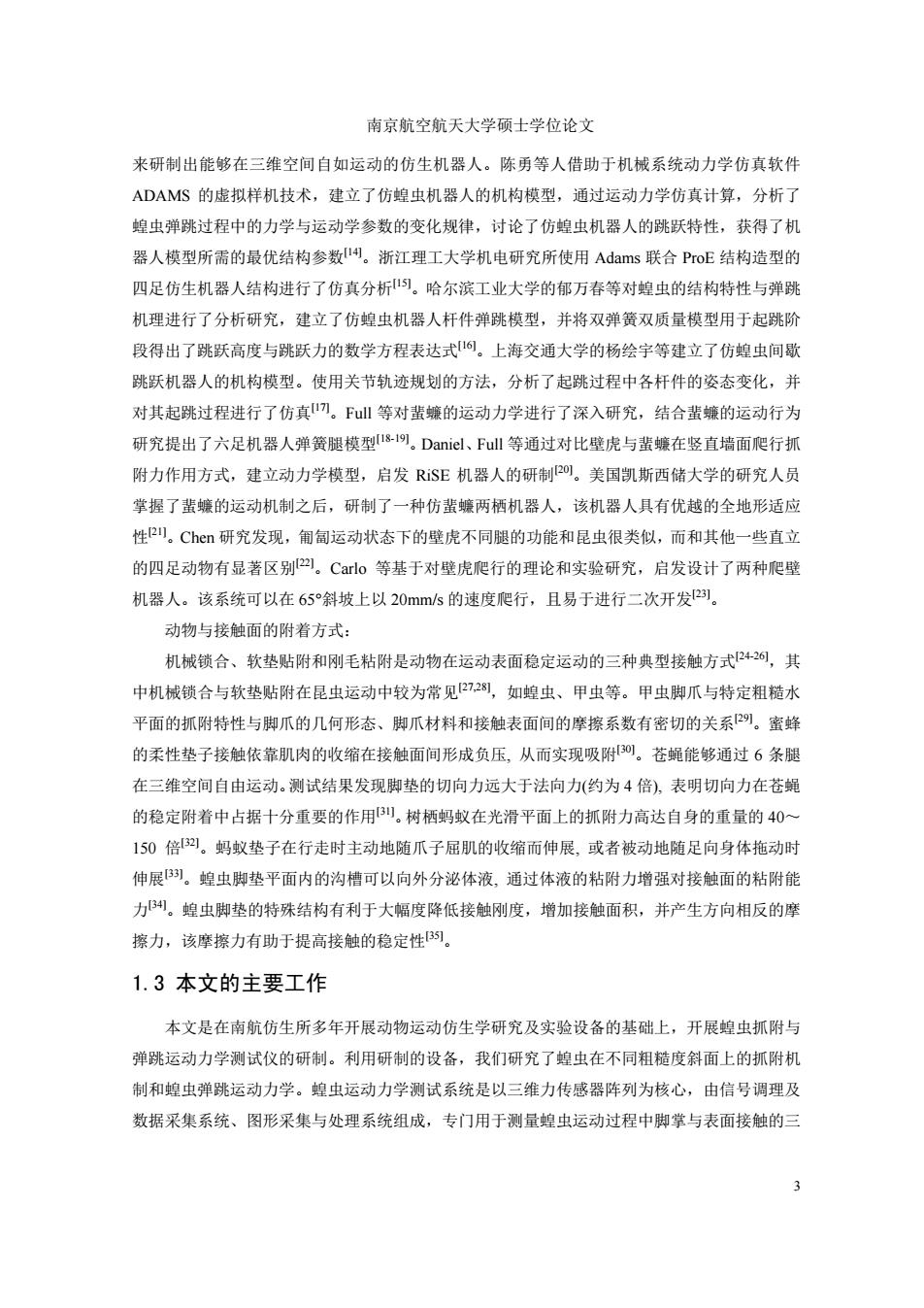
蝗虫抓附及跳跃的运动力学测试与建模分析 股节 胫节 转节 跗节 5mm 图2.2蝗虫后腿结构示意图 其中,胫节与跗节之间多以球窝关节相连可。即胫节末端形成一个球窝,将跗节基部球状 突起包纳,如图2.3,胫节和股节连接关节突起为椭球形,两者之间相对运动为绕椭球长轴的转 动,所以对于蝗虫的胫节和跗节的连接关节可以视为转动副。 Dorsal Semi-lun Insertion of flexor Flexible membrane Cover plate tibiac muscle Ven 图2.3蝗虫胫节和股节连接关节示意图3刃 2.1.2蝗虫的跗节 蝗虫跗节从前向后依次分布着前跗节的爪子和中垫,面积较大的垫和根部的爪子。蝗虫足 掌以软性外表皮包含血浆(液体)的结构形式(如图2.4),有利于降低接触刚度、增加接触面积, 并使爪垫在接触过程中产生有利于稳定附着的摩擦力。软性外表皮内的树丛状杆组织结构会提 高足掌在各种表面上的适应性,降低足掌内部的应力B)。蝗虫脚爪结构向内弯曲,具有明显的摩 擦非对称性特征。 蝗虫足跗节是通过肌肉的收缩和舒张来控制的。肌肉的收缩在关节处作用一个驱动力矩, 使跗节接触到表面上。当需要走动时,收缩肌舒张,跗骨的多段结构和关节的弹性使脚爪和表 面分离,这种由单个肌肉控制跗节的方式迅速快捷且有效,有利于蝗虫在凹凸不平的表面上行 走29。 6
蝗虫抓附及跳跃的运动力学测试与建模分析 6 图 2. 2 蝗虫后腿结构示意图 其中,胫节与跗节之间多以球窝关节相连[37]。即胫节末端形成一个球窝,将跗节基部球状 突起包纳,如图 2.3,胫节和股节连接关节突起为椭球形,两者之间相对运动为绕椭球长轴的转 动,所以对于蝗虫的胫节和跗节的连接关节可以视为转动副。 图 2. 3 蝗虫胫节和股节连接关节示意图[37] 2.1.2 蝗虫的跗节 蝗虫跗节从前向后依次分布着前跗节的爪子和中垫,面积较大的垫和根部的爪子。蝗虫足 掌以软性外表皮包含血浆(液体)的结构形式(如图 2.4),有利于降低接触刚度、增加接触面积, 并使爪垫在接触过程中产生有利于稳定附着的摩擦力。软性外表皮内的树丛状杆组织结构会提 高足掌在各种表面上的适应性,降低足掌内部的应力[35]。蝗虫脚爪结构向内弯曲,具有明显的摩 擦非对称性特征。 蝗虫足跗节是通过肌肉的收缩和舒张来控制的。肌肉的收缩在关节处作用一个驱动力矩, 使跗节接触到表面上。当需要走动时,收缩肌舒张,跗骨的多段结构和关节的弹性使脚爪和表 面分离,这种由单个肌肉控制跗节的方式迅速快捷且有效,有利于蝗虫在凹凸不平的表面上行 走[29]