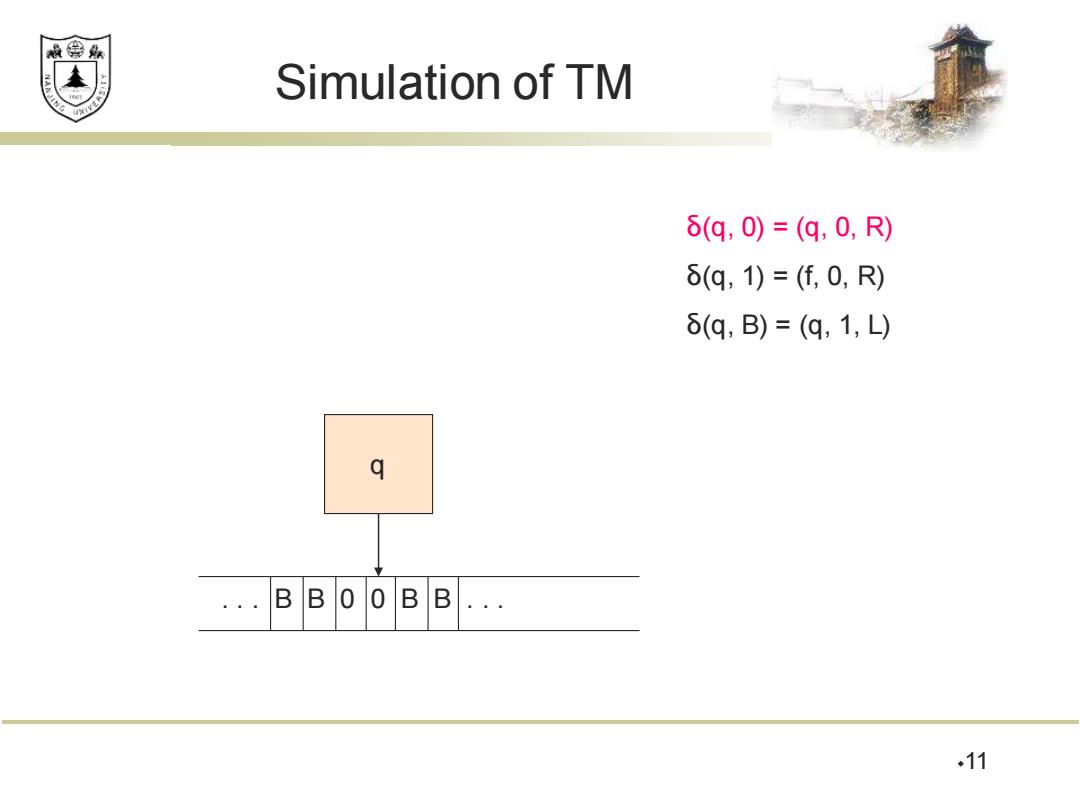
效绵鼎 Simulation of TM 6(q,0)=(q,0,R) δ(q,1)=(f,0,R) δ(q,B)=(q,1,L) q BBO O BB... .11
Simulation of TM 11 δ(q, 0) = (q, 0, R) δ(q, 1) = (f, 0, R) δ(q, B) = (q, 1, L) . . . B B 0 0 B B . . . q
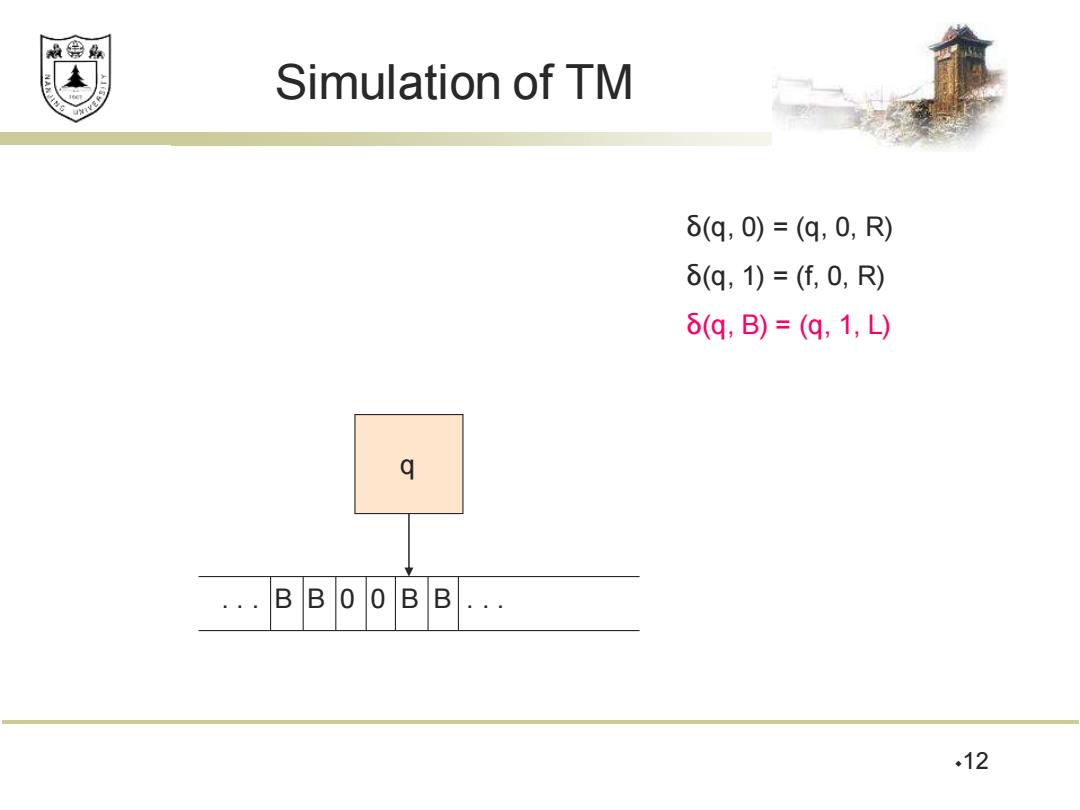
效绵鼎 Simulation of TM δ(q,0)=(q,0,R) δ(q,1)=(f,0,R) δ(q,B)=(q,1,L) q ..BB .12
Simulation of TM 12 δ(q, 0) = (q, 0, R) δ(q, 1) = (f, 0, R) δ(q, B) = (q, 1, L) . . . B B 0 0 B B . . . q
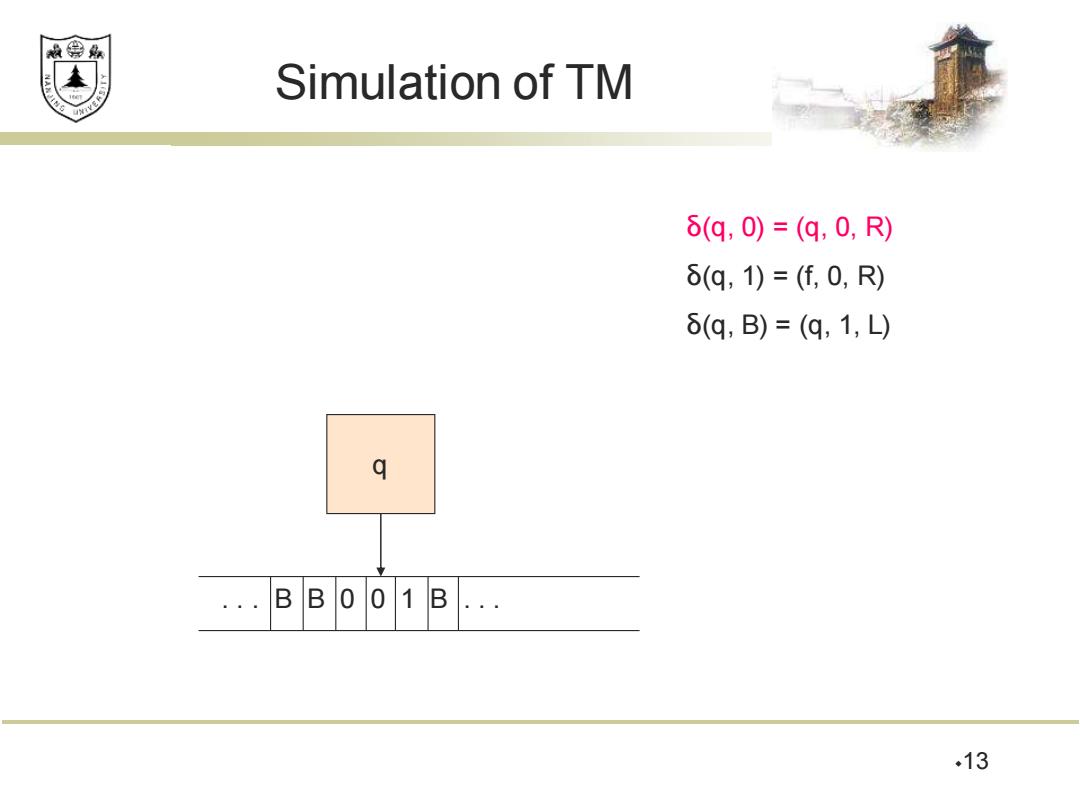
效绵鼎 Simulation of TM 6(q,0)=(q,0,R) δ(q,1)=(f,0,R) δ(q,B)=(q,1,L) q BB O 0 1B .13
Simulation of TM 13 δ(q, 0) = (q, 0, R) δ(q, 1) = (f, 0, R) δ(q, B) = (q, 1, L) . . . B B 0 0 1 B . . . q
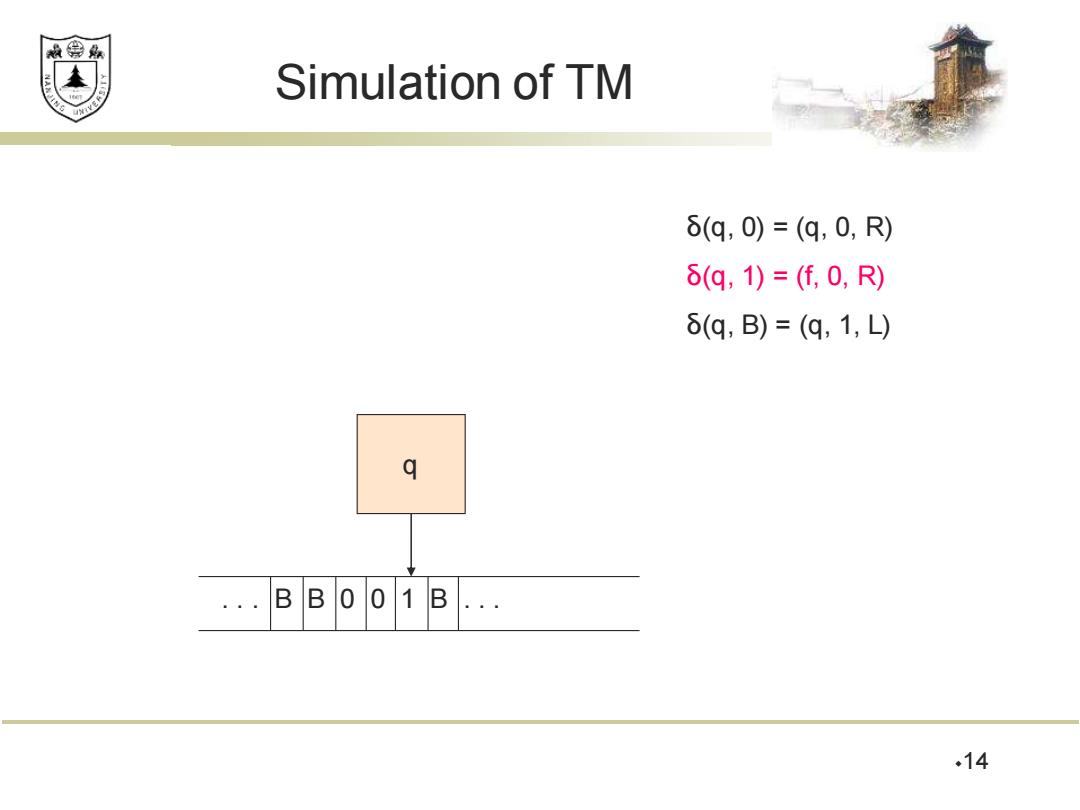
效绵鼎 Simulation of TM δ(q,0)=(q,0,R) δ(q,1)=(f,0,R) δ(q,B)=(q,1,L) q BB O 0 1B .14
Simulation of TM 14 δ(q, 0) = (q, 0, R) δ(q, 1) = (f, 0, R) δ(q, B) = (q, 1, L) . . . B B 0 0 1 B . . . q
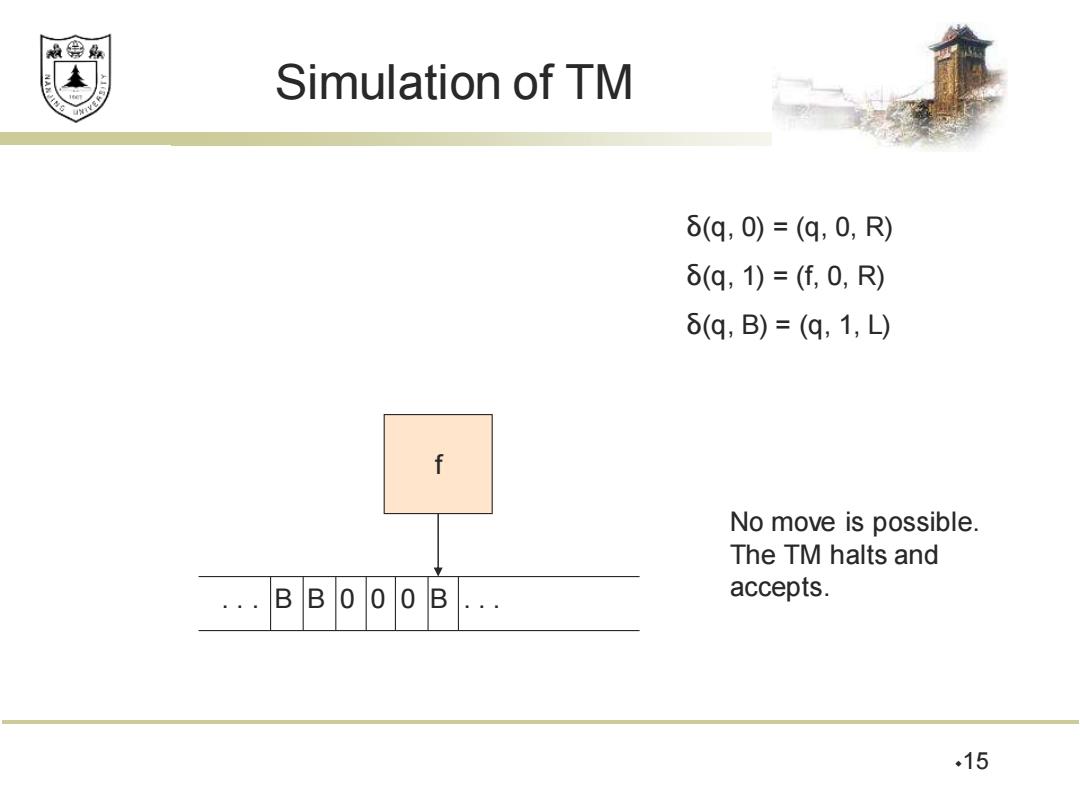
效绵鼎 Simulation of TM δ(q,0)=(q,0,R) δ(q,1)=(f,0,R) δ(q,B)=(q,1,L) No move is possible. The TM halts and ..BB000B accepts. .15
Simulation of TM 15 δ(q, 0) = (q, 0, R) δ(q, 1) = (f, 0, R) δ(q, B) = (q, 1, L) No move is possible. The TM halts and accepts. . . . B B 0 0 0 B . . . f