南昌航空大学硕士学位论文 第1章绪论 1.2.2国内扑翼飞行器的研究现状 国内对仿生扑翼飞行器的研究无论是在飞行机理方面还是在设计与制作方面 都与国外有一定的差距。尽管如此,国内的一些研究学者们还是取得了不少成果。 中国水稻研究所4、曾理江等6对昆虫的运动机理进行了深入研究:北 京航空航天大学的孙茂等人820在研究了昆虫气动特性的基础上对微型飞行器 的飞行原理也进行了相关探索222。 南京航空航天大学的曾锐、昂海松等224在对鸟类扑翼飞行机理的研究基础 上研制出了仿鸟微型扑翼飞行器,如图1-7所示:同时,西北工业大学也研制出了 相关FMAV,如图1-8所示;此外,东南大学对扑翼飞行器的运动特性和控制进行 了研究2521;扬州大学和上海交通大学也进行了相关探讨研究,并取得了一定的 成果。 图1-7南京航空航天大学研制的扑翼机 图1-8西北工业大学研制的扑翼机 就目前而言,在研究扑翼飞行器的飞行机理方面尤其是实践方面,我们还有 很长的路要走,正可谓任重而道远。但我相信在不久的将来,通过不断的探索和 研究,我们必将在这方面的取得实质性的突破。 1.3扑翼生物飞行的机理研究 研究扑翼生物的飞行机理,对于仿生微型扑翼飞行器的设计具有重要的意义。 随着MAV概念的提出,扑翼生物的飞行机理吸引了众多科学家们的关注。相关研 究表明:扑翼生物的飞行是利用非定常流来实现高升力的2,这是因为扑翼生物 飞行时的Re数大约在10~10之间2刃,此时扑翼所产生的升力较低。 鸟类所具有优异的飞行性能与其自身翅膀的结构特征密不可分,几种典型的鸟 4 万方数据
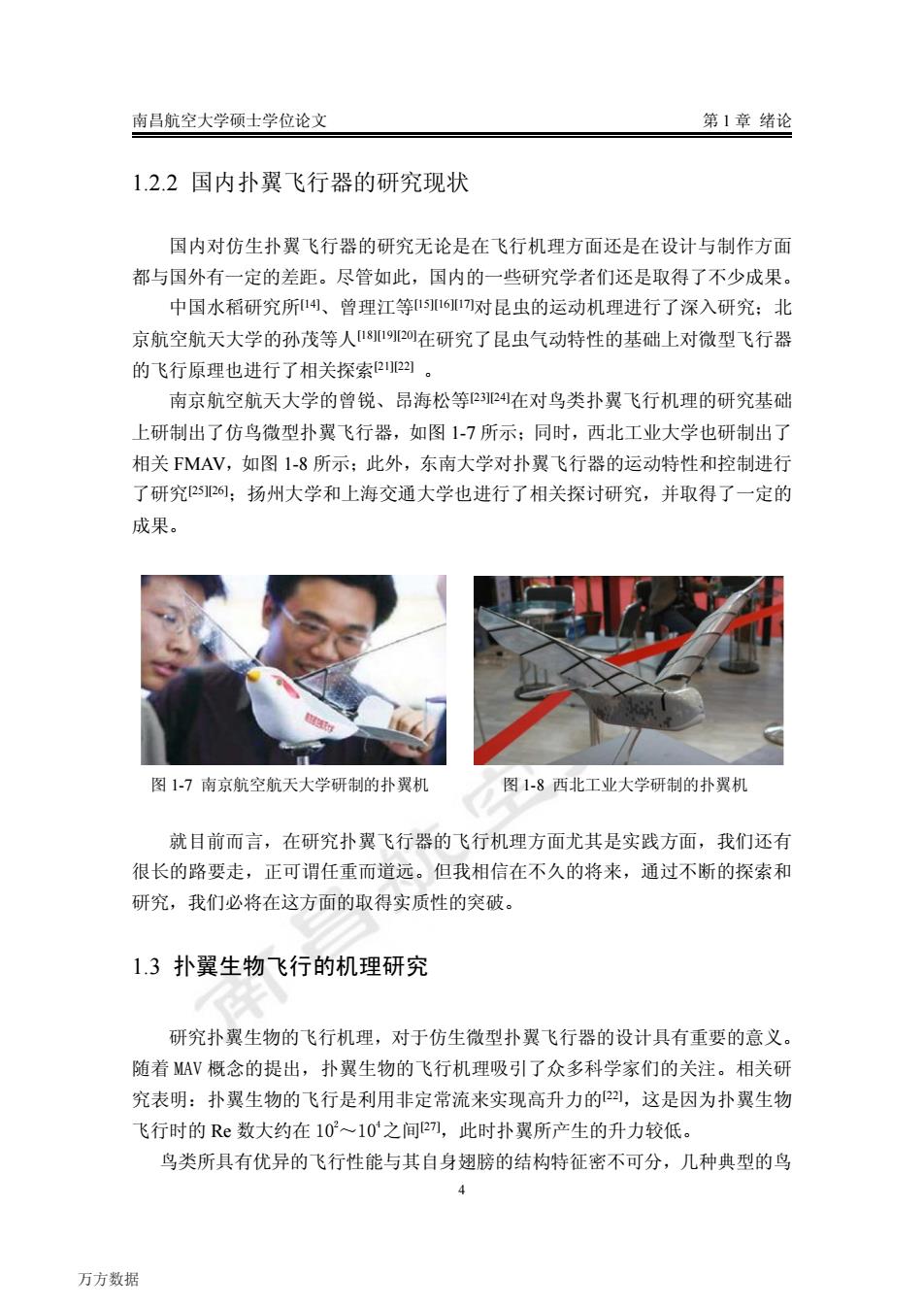
南昌航空大学硕士学位论文 第 1 章 绪论 4 1.2.2 国内扑翼飞行器的研究现状 国内对仿生扑翼飞行器的研究无论是在飞行机理方面还是在设计与制作方面 都与国外有一定的差距。尽管如此,国内的一些研究学者们还是取得了不少成果。 中国水稻研究所[14]、曾理江等[15][16][17]对昆虫的运动机理进行了深入研究;北 京航空航天大学的孙茂等人[18][19][20]在研究了昆虫气动特性的基础上对微型飞行器 的飞行原理也进行了相关探索[21][22] 。 南京航空航天大学的曾锐、昂海松等[23][24]在对鸟类扑翼飞行机理的研究基础 上研制出了仿鸟微型扑翼飞行器,如图 1-7 所示;同时,西北工业大学也研制出了 相关 FMAV,如图 1-8 所示;此外,东南大学对扑翼飞行器的运动特性和控制进行 了研究[25][26];扬州大学和上海交通大学也进行了相关探讨研究,并取得了一定的 成果。 图 1-7 南京航空航天大学研制的扑翼机 图 1-8 西北工业大学研制的扑翼机 就目前而言,在研究扑翼飞行器的飞行机理方面尤其是实践方面,我们还有 很长的路要走,正可谓任重而道远。但我相信在不久的将来,通过不断的探索和 研究,我们必将在这方面的取得实质性的突破。 1.3 扑翼生物飞行的机理研究 研究扑翼生物的飞行机理,对于仿生微型扑翼飞行器的设计具有重要的意义。 随着 MAV 概念的提出,扑翼生物的飞行机理吸引了众多科学家们的关注。相关研 究表明:扑翼生物的飞行是利用非定常流来实现高升力的[22],这是因为扑翼生物 飞行时的 Re 数大约在 10 2~10 4之间[27],此时扑翼所产生的升力较低。 鸟类所具有优异的飞行性能与其自身翅膀的结构特征密不可分,几种典型的鸟 万方数据
南昌航空大学硕士学位论文 第1章绪论 类翅膀外形以及剖面如图1-9所示。 图1-9鸟类翅膀及翅膀内翼剖面模型 鸟类是通过上扑下扑、翅膀扭转、翅膀折叠运动时翅膀各个部分的协调动作 来产生有效的升力和推力的,其翅膀的扑动可以分成四个阶段,如图1-10所示。 (1):下扑阶段:下扑阶段是产生升力的主要阶段,见图1-10(1-7): (2):折叠阶段:见图1-9(8-11): (3):上扑阶段:见图1-9(12-13): (4):展平阶段:见图1-9(14): 图1-10鸟的扑动 昆虫与鸟的扑动方式有很大的不同,昆虫是通过复杂和高频的翅翼拍动来产 生足够的升力。昆虫翅膀的结构与鸟类也有很大的差异,如图1-11所示。 图1-11典型的昆虫翅膀 5 万方数据
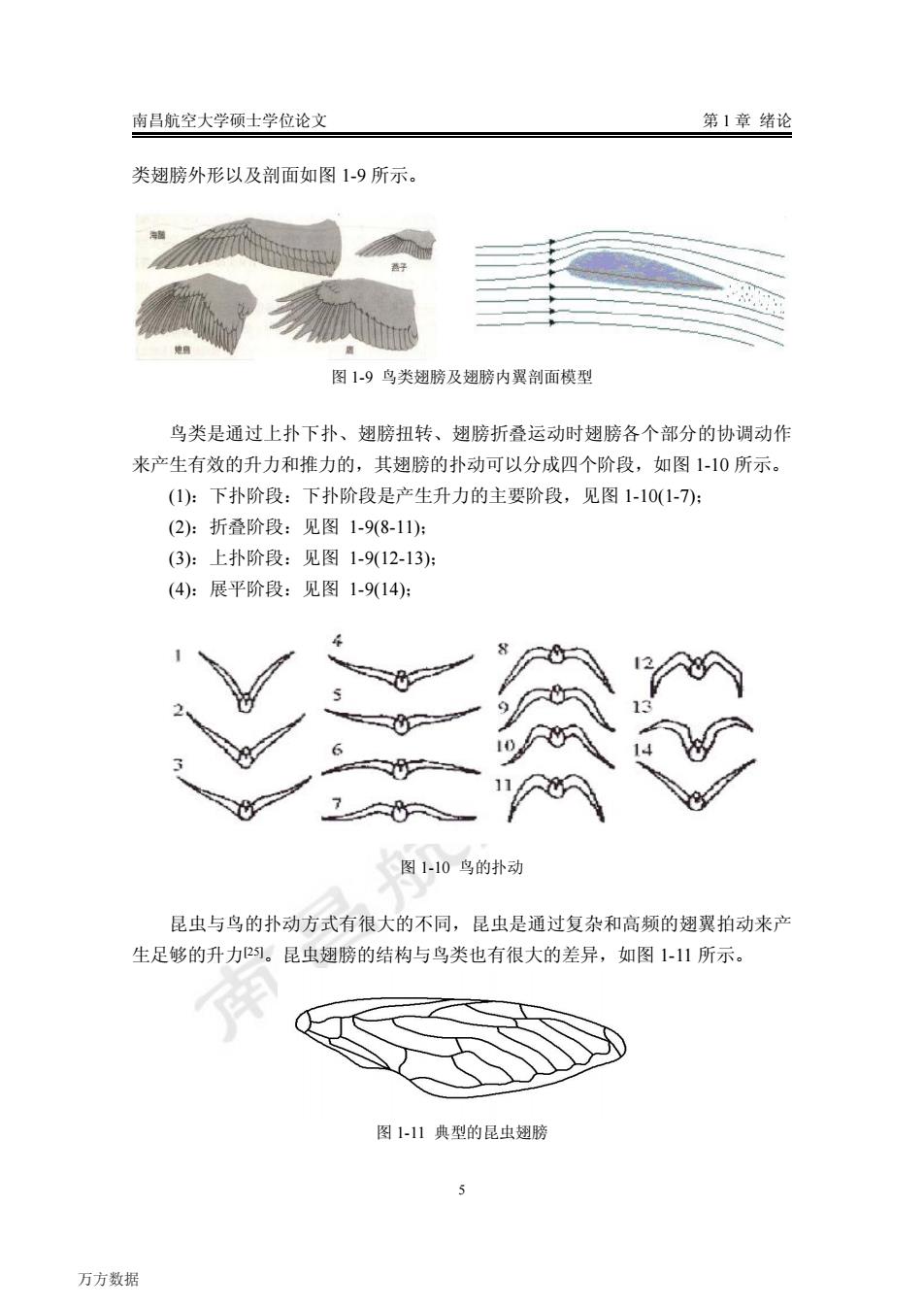
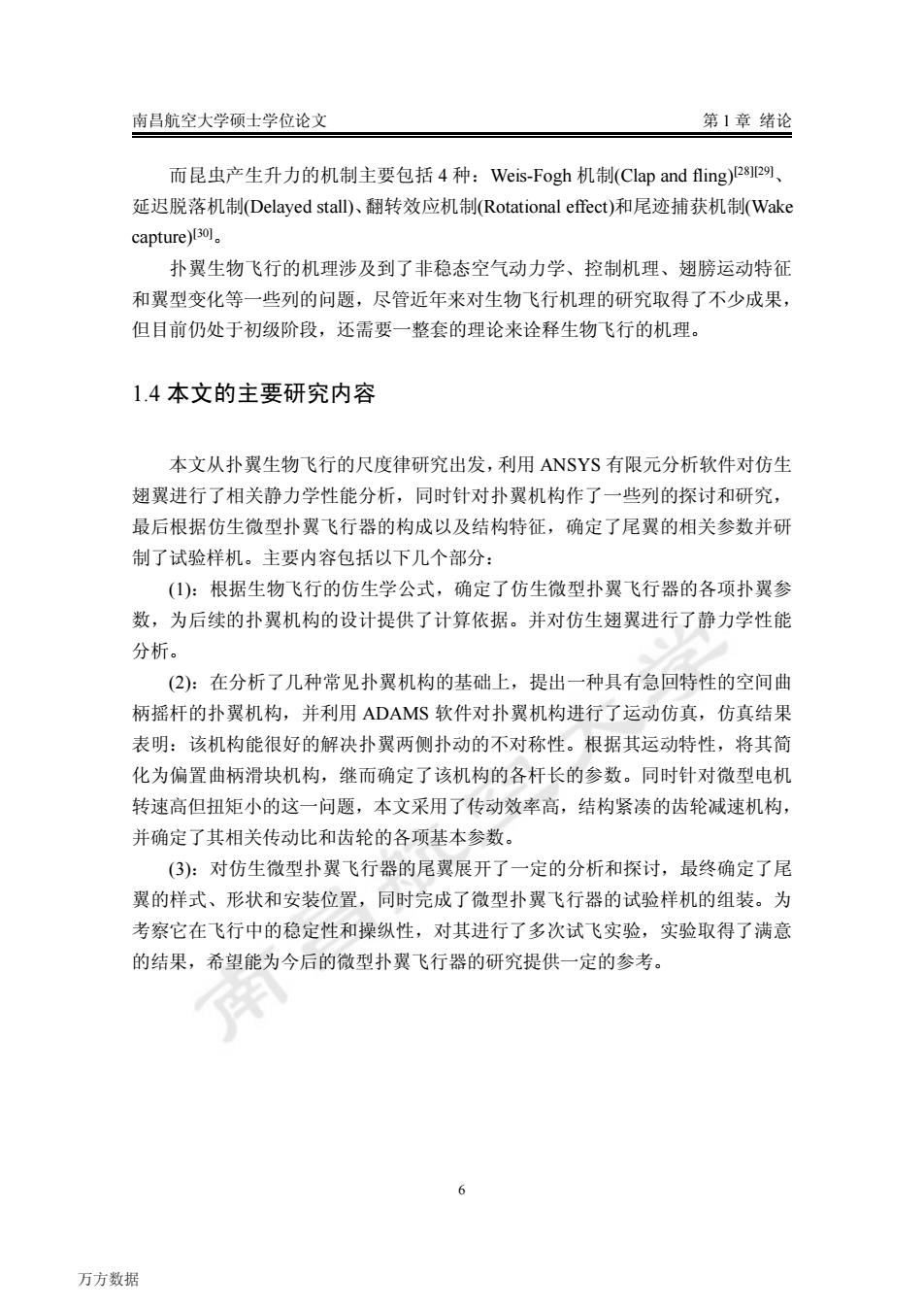
南昌航空大学硕士学位论文 第 1 章 绪论 5 类翅膀外形以及剖面如图 1-9 所示。 图 1-9 鸟类翅膀及翅膀内翼剖面模型 鸟类是通过上扑下扑、翅膀扭转、翅膀折叠运动时翅膀各个部分的协调动作 来产生有效的升力和推力的,其翅膀的扑动可以分成四个阶段,如图 1-10 所示。 (1):下扑阶段:下扑阶段是产生升力的主要阶段,见图 1-10(1-7); (2):折叠阶段:见图 1-9(8-11); (3):上扑阶段:见图 1-9(12-13); (4):展平阶段:见图 1-9(14); 图 1-10 鸟的扑动 昆虫与鸟的扑动方式有很大的不同,昆虫是通过复杂和高频的翅翼拍动来产 生足够的升力[25]。昆虫翅膀的结构与鸟类也有很大的差异,如图 1-11 所示。 图 1-11 典型的昆虫翅膀 万方数据
南昌航空大学硕士学位论文 第1章绪论 而昆虫产生升力的机制主要包括4种:Weis-Fogh机制(Clap and fling)28[29、 延迟脱落机制(Delayed stall)、翻转效应机制(Rotational effect)和尾迹捕获机制(Wake capture)3o。 扑翼生物飞行的机理涉及到了非稳态空气动力学、控制机理、翅膀运动特征 和翼型变化等一些列的问题,尽管近年来对生物飞行机理的研究取得了不少成果, 但目前仍处于初级阶段,还需要一整套的理论来诠释生物飞行的机理。 1.4本文的主要研究内容 本文从扑翼生物飞行的尺度律研究出发,利用ANSYS有限元分析软件对仿生 翅翼进行了相关静力学性能分析,同时针对扑翼机构作了一些列的探讨和研究, 最后根据仿生微型扑翼飞行器的构成以及结构特征,确定了尾翼的相关参数并研 制了试验样机。主要内容包括以下几个部分: ():根据生物飞行的仿生学公式,确定了仿生微型扑翼飞行器的各项扑翼参 数,为后续的扑翼机构的设计提供了计算依据。并对仿生翅翼进行了静力学性能 分析。 (2):在分析了几种常见扑翼机构的基础上,提出一种具有急回特性的空间曲 柄摇杆的扑翼机构,并利用ADAMS软件对扑翼机构进行了运动仿真,仿真结果 表明:该机构能很好的解决扑翼两侧扑动的不对称性。根据其运动特性,将其简 化为偏置曲柄滑块机构,继而确定了该机构的各杆长的参数。同时针对微型电机 转速高但扭矩小的这一问题,本文采用了传动效率高,结构紧凑的齿轮减速机构, 并确定了其相关传动比和齿轮的各项基本参数。 (3):对仿生微型扑翼飞行器的尾翼展开了一定的分析和探讨,最终确定了尾 翼的样式、形状和安装位置,同时完成了微型扑翼飞行器的试验样机的组装。为 考察它在飞行中的稳定性和操纵性,对其进行了多次试飞实验,实验取得了满意 的结果,希望能为今后的微型扑翼飞行器的研究提供一定的参考。 6 万方数据
南昌航空大学硕士学位论文 第 1 章 绪论 6 而昆虫产生升力的机制主要包括 4 种:Weis-Fogh 机制(Clap and fling) [28][29]、 延迟脱落机制(Delayed stall)、翻转效应机制(Rotational effect)和尾迹捕获机制(Wake capture) [30]。 扑翼生物飞行的机理涉及到了非稳态空气动力学、控制机理、翅膀运动特征 和翼型变化等一些列的问题,尽管近年来对生物飞行机理的研究取得了不少成果, 但目前仍处于初级阶段,还需要一整套的理论来诠释生物飞行的机理。 1.4 本文的主要研究内容 本文从扑翼生物飞行的尺度律研究出发,利用 ANSYS 有限元分析软件对仿生 翅翼进行了相关静力学性能分析,同时针对扑翼机构作了一些列的探讨和研究, 最后根据仿生微型扑翼飞行器的构成以及结构特征,确定了尾翼的相关参数并研 制了试验样机。主要内容包括以下几个部分: (1):根据生物飞行的仿生学公式,确定了仿生微型扑翼飞行器的各项扑翼参 数,为后续的扑翼机构的设计提供了计算依据。并对仿生翅翼进行了静力学性能 分析。 (2):在分析了几种常见扑翼机构的基础上,提出一种具有急回特性的空间曲 柄摇杆的扑翼机构,并利用 ADAMS 软件对扑翼机构进行了运动仿真,仿真结果 表明:该机构能很好的解决扑翼两侧扑动的不对称性。根据其运动特性,将其简 化为偏置曲柄滑块机构,继而确定了该机构的各杆长的参数。同时针对微型电机 转速高但扭矩小的这一问题,本文采用了传动效率高,结构紧凑的齿轮减速机构, 并确定了其相关传动比和齿轮的各项基本参数。 (3):对仿生微型扑翼飞行器的尾翼展开了一定的分析和探讨,最终确定了尾 翼的样式、形状和安装位置,同时完成了微型扑翼飞行器的试验样机的组装。为 考察它在飞行中的稳定性和操纵性,对其进行了多次试飞实验,实验取得了满意 的结果,希望能为今后的微型扑翼飞行器的研究提供一定的参考。 万方数据
南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 第2章仿生翅翼有限元模型的建立及静力学分析 2.1扑翼生物飞行的尺度律研究 所谓尺度律就是指飞行生物的外形尺寸等参数随着特征变量的改变而变化的 规律。尺度律是分析生物飞行中的各种参数(如频率、翼面积等)之间的关系及其 对气动特性的影响的一个重要规律,其对仿生微型扑翼飞行器的研究起到了重要 的借鉴作用B。 仿生学公式是以质量为基本参数,相关研究表明:扑翼生物的各项参数都可 以用质量m来表示,表2-1为鸟的相关参数与质量之间的关系。 表2-1鸟的相关参数与质量m之间的关系 翼展 翼面积 翼载荷 展弦比 最小功 最大速扑翼频率 (m) (m2) (N/m2) 率速度 度范围 (Hz) (m/s) (m/s) 鸟类 除蜂 1.17m0.39 0.16m0.2 62.2m0.28 8.56m0.565.70m0.06 15.4m03.87m03 鸟 蜂鸟 2.24m0.53 0.69m1.0414.3m0.047.28m0.02 5.70m0.0615.4m1.103.87m-0.33 仿生学公式为仿生微型扑翼飞行器的设计提供了一个可以参考的大致范围。 而在实际的研制过程中,应根据实际情况确定合适的尺寸。实际上质量的大小与 多种因素有关,例如主要零部件的尺寸、外形、材料、加工等因素。 本文实际制作的仿生微型扑翼飞行器主要由电机、电池、扑翼机构、传动机 构、机身以及其它零部件组成,如图2-1所示。 > 万方数据
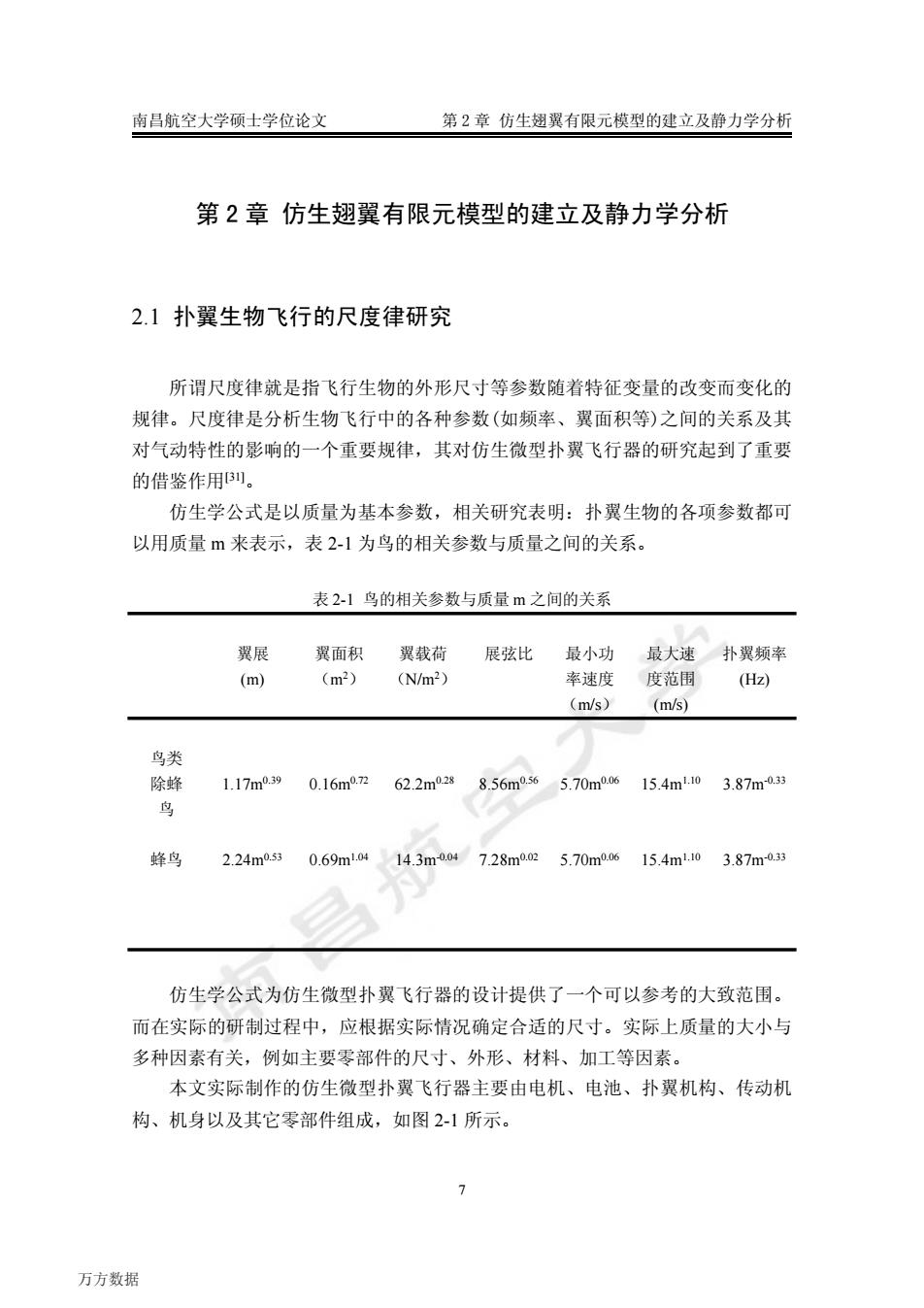
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 7 第 2 章 仿生翅翼有限元模型的建立及静力学分析 2.1 扑翼生物飞行的尺度律研究 所谓尺度律就是指飞行生物的外形尺寸等参数随着特征变量的改变而变化的 规律。尺度律是分析生物飞行中的各种参数(如频率、翼面积等)之间的关系及其 对气动特性的影响的一个重要规律,其对仿生微型扑翼飞行器的研究起到了重要 的借鉴作用[31]。 仿生学公式是以质量为基本参数,相关研究表明:扑翼生物的各项参数都可 以用质量 m 来表示,表 2-1 为鸟的相关参数与质量之间的关系。 表 2-1 鸟的相关参数与质量 m 之间的关系 翼展 (m) 翼面积 (m2) 翼载荷 (N/m2) 展弦比 最小功 率速度 (m/s) 最大速 度范围 (m/s) 扑翼频率 (Hz) 鸟类 除蜂 鸟 蜂鸟 1.17m0.39 2.24m0.53 0.16m0.72 0.69m1.04 62.2m0.28 14.3m-0.04 8.56m0.56 7.28m0.02 5.70m0.06 5.70m0.06 15.4m1.10 15.4m1.10 3.87m-0.33 3.87m-0.33 仿生学公式为仿生微型扑翼飞行器的设计提供了一个可以参考的大致范围。 而在实际的研制过程中,应根据实际情况确定合适的尺寸。实际上质量的大小与 多种因素有关,例如主要零部件的尺寸、外形、材料、加工等因素。 本文实际制作的仿生微型扑翼飞行器主要由电机、电池、扑翼机构、传动机 构、机身以及其它零部件组成,如图 2-1 所示。 万方数据
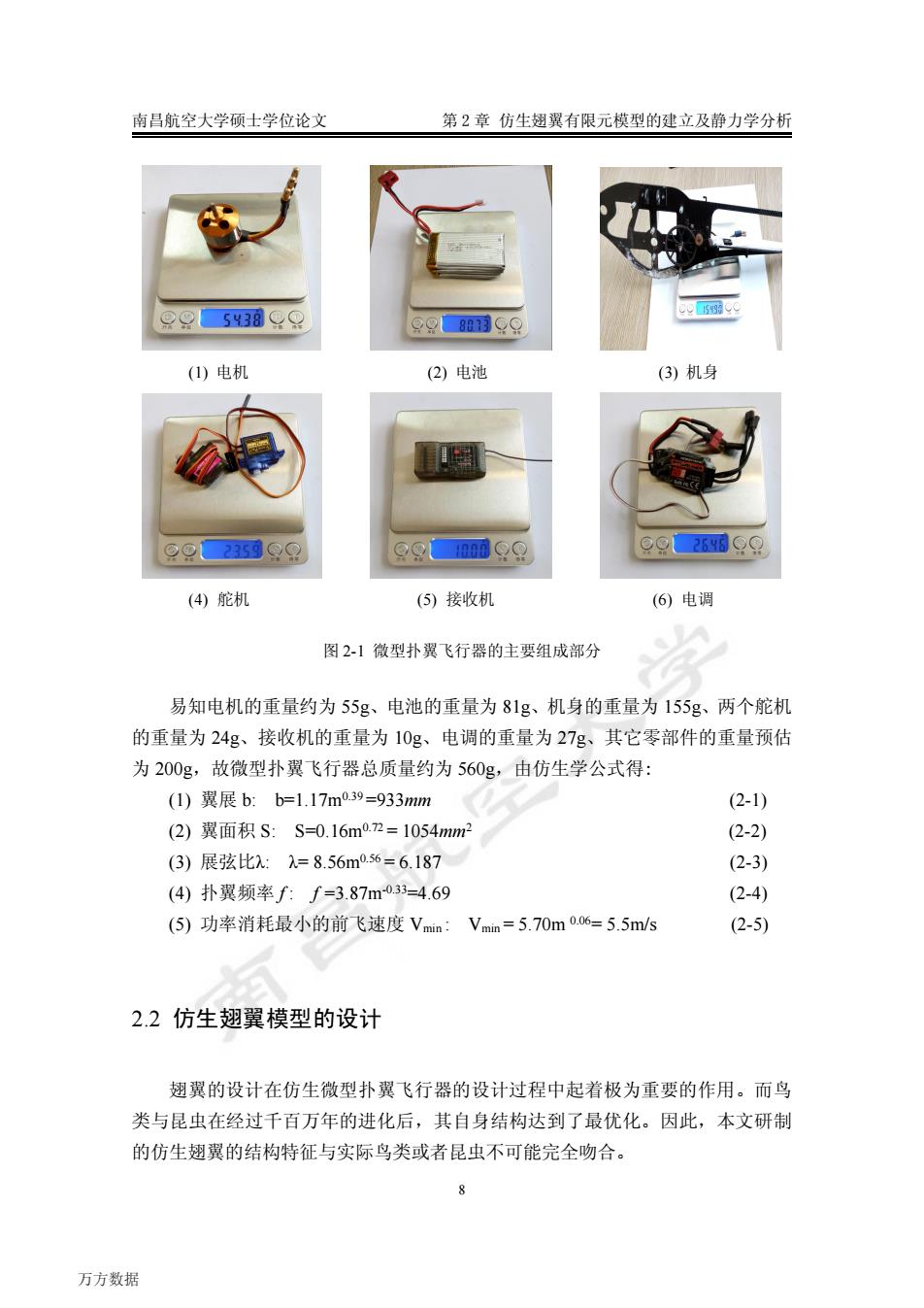
南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 ⊙95¥3a0Q 99881m09 (1)电机 (2)电池 (3)机身 O925899 GO29Q (4)舵机 (⑤)接收机 (6)电调 图2-1微型扑翼飞行器的主要组成部分 易知电机的重量约为55g、电池的重量为81g、机身的重量为155g、两个舵机 的重量为24g、接收机的重量为10g、电调的重量为27g、其它零部件的重量预估 为200g,故微型扑翼飞行器总质量约为560g,由仿生学公式得: (1)翼展b:b=1.17m0.39=933mm (2-1) (2)翼面积S:S=0.16m0.72=1054mm2 (2-2) (3)展弦比:=8.56m0.56=6.187 (2-3) (4)扑翼频率f:f=3.87m033=4.69 (2-4) (5)功率消耗最小的前飞速度Vmim:Vmim=5.70mo.o6=5.5m/s (2-5) 2.2仿生翅翼模型的设计 翅翼的设计在仿生微型扑翼飞行器的设计过程中起着极为重要的作用。而鸟 类与昆虫在经过千百万年的进化后,其自身结构达到了最优化。因此,本文研制 的仿生翅翼的结构特征与实际鸟类或者昆虫不可能完全吻合。 万方数据
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 8 (1) 电机 (2) 电池 (3) 机身 (4) 舵机 (5) 接收机 (6) 电调 图 2-1 微型扑翼飞行器的主要组成部分 易知电机的重量约为 55g、电池的重量为 81g、机身的重量为 155g、两个舵机 的重量为 24g、接收机的重量为 10g、电调的重量为 27g、其它零部件的重量预估 为 200g,故微型扑翼飞行器总质量约为 560g,由仿生学公式得: (1) 翼展 b: b=1.17m0.39 =933mm (2-1) (2) 翼面积 S: S=0.16m0.72 = 1054mm2 (2-2) (3) 展弦比λ: λ= 8.56m0.56 = 6.187 (2-3) (4) 扑翼频率 f : f =3.87m-0.33=4.69 (2-4) (5) 功率消耗最小的前飞速度 Vmin : Vmin = 5.70m 0.06= 5.5m/s (2-5) 2.2 仿生翅翼模型的设计 翅翼的设计在仿生微型扑翼飞行器的设计过程中起着极为重要的作用。而鸟 类与昆虫在经过千百万年的进化后,其自身结构达到了最优化。因此,本文研制 的仿生翅翼的结构特征与实际鸟类或者昆虫不可能完全吻合。 万方数据