南昌航空大学硕士学位论文 目录 目录 摘要 I Abstract. 目录 第1章绪论 ..1 1.1引言 .1 1.2扑翼飞行器的研究现状. 2 1.2.1国外扑翼飞行器的研究现状 1.2.2国内扑翼飞行器的研究现状 ..4 1.3扑翼生物飞行的机理研究… 1.4本文的主要研究内容 6 第2章仿生翅翼有限元模型的建立及静力学分析 ·> 2.1扑翼生物飞行的尺度律研究 > 2.2仿生翅翼模型的设计… 2.3有限元理论 11 2.3.1 ANSYS的量纲以及参数确定 12 2.3.2仿生翅翼的有限元网格划分 13 2.4仿生翅翼的静力学分析. 14 2.4.1竖向均布载荷. 15 2.4.2弯矩作用下 16 2.4.3扭矩作用下 e 2.5本章小结 20 第3章扑翼机构的设计与研究 22 3.1常见扑翼机构的分析… 22 3.2扑翼飞行对扑翼机构的要求 24 3.3曲柄摇杆机构的分析… 25 3.3.1无急回特性曲柄摇杆机构 25 3.3.2具有急回特性的空间曲柄摇杆机构的设计 公 3.4齿轮减速机构的设计 29 万方数据
南昌航空大学硕士学位论文 目录 目录 摘 要........................................................................................................................................................I Abstract................................................................................................................................................. II 目录..........................................................................................................................................................I 第 1 章 绪论...........................................................................................................................................1 1.1 引言..........................................................................................................................................1 1.2 扑翼飞行器的研究现状..........................................................................................................2 1.2.1 国外扑翼飞行器的研究现状...................................................................................... 2 1.2.2 国内扑翼飞行器的研究现状...................................................................................... 4 1.3 扑翼生物飞行的机理研究..................................................................................................... 4 1.4 本文的主要研究内容...............................................................................................................6 第 2 章 仿生翅翼有限元模型的建立及静力学分析.......................................................................... 7 2.1 扑翼生物飞行的尺度律研究................................................................................................. 7 2.2 仿生翅翼模型的设计..............................................................................................................8 2.3 有限元理论............................................................................................................................11 2.3.1 ANSYS 的量纲以及参数确定................................................................................ 12 2.3.2 仿生翅翼的有限元网格划分.................................................................................... 13 2.4 仿生翅翼的静力学分析....................................................................................................... 14 2.4.1 竖向均布载荷.............................................................................................................15 2.4.2 弯矩作用下.................................................................................................................16 2.4.3 扭矩作用下.................................................................................................................18 2.5 本章小结................................................................................................................................20 第 3 章 扑翼机构的设计与研究........................................................................................................ 22 3.1 常见扑翼机构的分析............................................................................................................22 3.2 扑翼飞行对扑翼机构的要求............................................................................................... 24 3.3 曲柄摇杆机构的分析............................................................................................................25 3.3.1 无急回特性曲柄摇杆机构........................................................................................ 25 3.3.2 具有急回特性的空间曲柄摇杆机构的设计............................................................ 26 3.4 齿轮减速机构的设计............................................................................................................29 万方数据
南昌航空大学硕士学位论文 目录 3.5 ADAMS运动仿真 31 3.6本章小结… 好 第4章仿生微型扑翼飞行器样机的研制 .34 4.1仿生微型扑翼飞行器的设计方案 34 4.2仿生微型扑翼飞行器的构成 35 4.3尾翼的设计 37 4.3.1尾翼样式的选择 37 4.3.2尾翼形状的设计. 37 4.3.3尾翼的布置 39 4.4机身的设计以及装配 41 4.5样机试飞实验 42 4.6本章小结.… .45 第5章总结与展望 46 5.1总结.… .46 5.2展望 46 参考文献 .48 硕士期间发表的论文及学术成果 51 发表论文 参加科研项目. 51 致谢 52 南昌航空 万方数据
南昌航空大学硕士学位论文 目录 3.5 ADAMS 运动仿真.............................................................................................................. 31 3.6 本章小结................................................................................................................................33 第 4 章 仿生微型扑翼飞行器样机的研制........................................................................................ 34 4.1 仿生微型扑翼飞行器的设计方案....................................................................................... 34 4.2 仿生微型扑翼飞行器的构成............................................................................................... 35 4.3 尾翼的设计............................................................................................................................37 4.3.1 尾翼样式的选择........................................................................................................ 37 4.3.2 尾翼形状的设计........................................................................................................ 37 4.3.3 尾翼的布置.................................................................................................................39 4.4 机身的设计以及装配............................................................................................................41 4.5 样机试飞实验........................................................................................................................42 4.6 本章小结................................................................................................................................45 第 5 章 总结与展望.............................................................................................................................46 5.1 总结........................................................................................................................................46 5.2 展望........................................................................................................................................46 参考文献...............................................................................................................................................48 硕士期间发表的论文及学术成果...................................................................................................... 51 发表论文.......................................................................................................................................51 参加科研项目...............................................................................................................................51 致谢.......................................................................................................................................................52 万方数据
南昌航空大学硕士学位论文 第1章绪论 第1章绪论 1.1引言 自然界中的所有飞行生物无一不是采用扑翼方式飞行的,而鸟类与昆虫是自 然界中的飞行能手,它们经过亿万年的生物进化,无论其空气动力还是自身结构 方面都达到了最优。自古以来,人类就一直梦想能像鸟类那样翱翔天空。 然而由于早期的技术条件和研究水平有限,人们对扑翼飞行器的研究一直没 有实质性的进展,所以人们将目光慢慢转移到了固定翼飞机的研究当中。由于固 定翼飞机在速度、航程、升限、运载能力等方面都远远优于鸟类与昆虫,因此在 很长一段时间里,工程师们都致力于研究“更大更快”的飞行器,导致了人们对 扑翼飞行器的研究在一段时期内一直停滞不前。 1992年美国科学家布鲁诺·W·奥根斯坦在美国国防先进研究计划署(Defense Advanced Research Program Agency,DARPA)举办的一个关于未来军事技术的研讨 会上提出了研制微型飞行器(Micro Air Vehicle,MAV)的主张。MAV的技术指标 一般是指翼展在15cm左右,有效载荷20g,航速30-80km/h,滞空时间为20-60min, 能完成一定的任务等山。 微型飞行器的飞行雷诺数和飞行机理都不同于常规飞行器,它是属于低雷诺 数的范畴,在飞行时受到空气粘性力的影响较大。微型飞行器的类型按照其飞行 方式可分为三类,分别是微型固定翼飞行器、微型旋翼飞行器和微型扑翼飞行器 (Flapping Micro Air Vehicle,简称FMAV)。 微型扑翼飞行器(FMAV)是一种模仿鸟类或昆虫飞行的新概念飞行器。研究表 明:微型扑翼飞行器相比于微型固定翼飞行器和微型旋翼飞行器,它的可微程度 远远大于后者,同时具有更好的灵活性和机动性],因而更具有优势。随着现代科 研技术的快速发展,微型扑翼飞行器渐渐成为了目前新的研究热点之一,也是最 有发展前景的一类MAVBI4。 万方数据
南昌航空大学硕士学位论文 第 1 章 绪论 1 第 1 章 绪论 1.1 引言 自然界中的所有飞行生物无一不是采用扑翼方式飞行的,而鸟类与昆虫是自 然界中的飞行能手,它们经过亿万年的生物进化,无论其空气动力还是自身结构 方面都达到了最优。自古以来,人类就一直梦想能像鸟类那样翱翔天空。 然而由于早期的技术条件和研究水平有限,人们对扑翼飞行器的研究一直没 有实质性的进展,所以人们将目光慢慢转移到了固定翼飞机的研究当中。由于固 定翼飞机在速度、航程、升限、运载能力等方面都远远优于鸟类与昆虫,因此在 很长一段时间里,工程师们都致力于研究“更大更快”的飞行器,导致了人们对 扑翼飞行器的研究在一段时期内一直停滞不前。 1992 年美国科学家布鲁诺·W·奥根斯坦在美国国防先进研究计划署(Defense Advanced Research Program Agency,DARPA)举办的一个关于未来军事技术的研讨 会上提出了研制微型飞行器(Micro Air Vehicle,MAV)的主张。MAV 的技术指标 一般是指翼展在 15cm 左右,有效载荷 20g,航速 30-80km/h,滞空时间为 20-60min, 能完成一定的任务等[1]。 微型飞行器的飞行雷诺数和飞行机理都不同于常规飞行器,它是属于低雷诺 数的范畴,在飞行时受到空气粘性力的影响较大。微型飞行器的类型按照其飞行 方式可分为三类,分别是微型固定翼飞行器、微型旋翼飞行器和微型扑翼飞行器 (Flapping Micro Air Vehicle,简称 FMAV)。 微型扑翼飞行器(FMAV)是一种模仿鸟类或昆虫飞行的新概念飞行器。研究表 明:微型扑翼飞行器相比于微型固定翼飞行器和微型旋翼飞行器,它的可微程度 远远大于后者,同时具有更好的灵活性和机动性[2],因而更具有优势。随着现代科 研技术的快速发展,微型扑翼飞行器渐渐成为了目前新的研究热点之一,也是最 有发展前景的一类 MAV[3][4]。 万方数据
南昌航空大学硕士学位论文 第1章绪论 1.2扑翼飞行器的研究现状 由于微型扑翼飞行器在军事和民用上潜在的广阔应用前景,许多国家都己经 开展了对这方面的研究☑。尽管微型扑翼飞行器的研究面临着诸多困难,但是 国内外的探索者们却一直没有放弃实现扑翼飞行的梦想,甚至还取得了不少研究 成果。 1.2.1国外扑翼飞行器的研究现状 早在15世纪末,意大利的著名画家和工程师达·芬奇就设计出了一架利用人 力驱动的扑翼飞行器,如图1-1所示。尽管最终没能成功飞行,但它为后续扑翼飞 行器的设计提供了一定的参考。 图1-1人力驱动扑翼飞行器 1874年,Alphonse Penaud设计出了一架利用橡皮筋驱动的扑翼飞行器,如图 1-2所示。在此后很长的一段时间内,许多研究者都以它为参照物而进行了大量改 进,但始终没能改善其效率低、飞行时间较短和升力不足的缺陷。 图1-2橡皮筋驱动的扑翼飞行器 2 万方数据
南昌航空大学硕士学位论文 第 1 章 绪论 2 1.2 扑翼飞行器的研究现状 由于微型扑翼飞行器在军事和民用上潜在的广阔应用前景,许多国家都已经 开展了对这方面的研究[5][6][7]。尽管微型扑翼飞行器的研究面临着诸多困难,但是 国内外的探索者们却一直没有放弃实现扑翼飞行的梦想,甚至还取得了不少研究 成果。 1.2.1 国外扑翼飞行器的研究现状 早在 15 世纪末,意大利的著名画家和工程师达·芬奇就设计出了一架利用人 力驱动的扑翼飞行器,如图 1-1 所示。尽管最终没能成功飞行,但它为后续扑翼飞 行器的设计提供了一定的参考。 图 1-1 人力驱动扑翼飞行器 1874 年,Alphonse Penaud 设计出了一架利用橡皮筋驱动的扑翼飞行器,如图 1-2 所示。在此后很长的一段时间内,许多研究者都以它为参照物而进行了大量改 进,但始终没能改善其效率低、飞行时间较短和升力不足的缺陷。 图 1-2 橡皮筋驱动的扑翼飞行器 万方数据
南昌航空大学硕士学位论文 第1章绪论 1998年美国加州大学伯克利分校研制出了一架微型扑翼飞行昆虫MFI8),它能 简单模仿苍蝇的飞行特征,但只能短暂飞行,如图13所示。 美国乔治亚理工学院的Michelson等人也研制出了一架仿昆虫微型扑翼飞行 器“Entomopters”[),如图1-4所示。“Entomopters”的机翼由特殊结构和材料制 成,它是由人造肌肉驱动的方式带动机翼上下扑动来产生升力,并且该飞行器具 有一定盘旋能力0。 图1-3加州大学的MFI 图l-4乔治亚理工学院的Entomopters 人类最早的电动仿生扑翼飞行器是由加州理工学院、AeroVironment和加州大 学于1998年联合研制的微型蝙蝠“Microbat”[2,如图1-5所示。该飞行器采 用锂电池作为动力源,机翼能以一定的的频率进行扑动,并飞行了一定的距离。 在FMAV制作方面最成功的是德国FESTO公司在2011年研制成功的 SmartBirdl3),如图1-6。它的翅翼不但能上下扑动还能够实现一定程度的扭转。 图1-5加州理工学院的Microbat 图1-6德国FESTO公司的SmartBird 万方数据
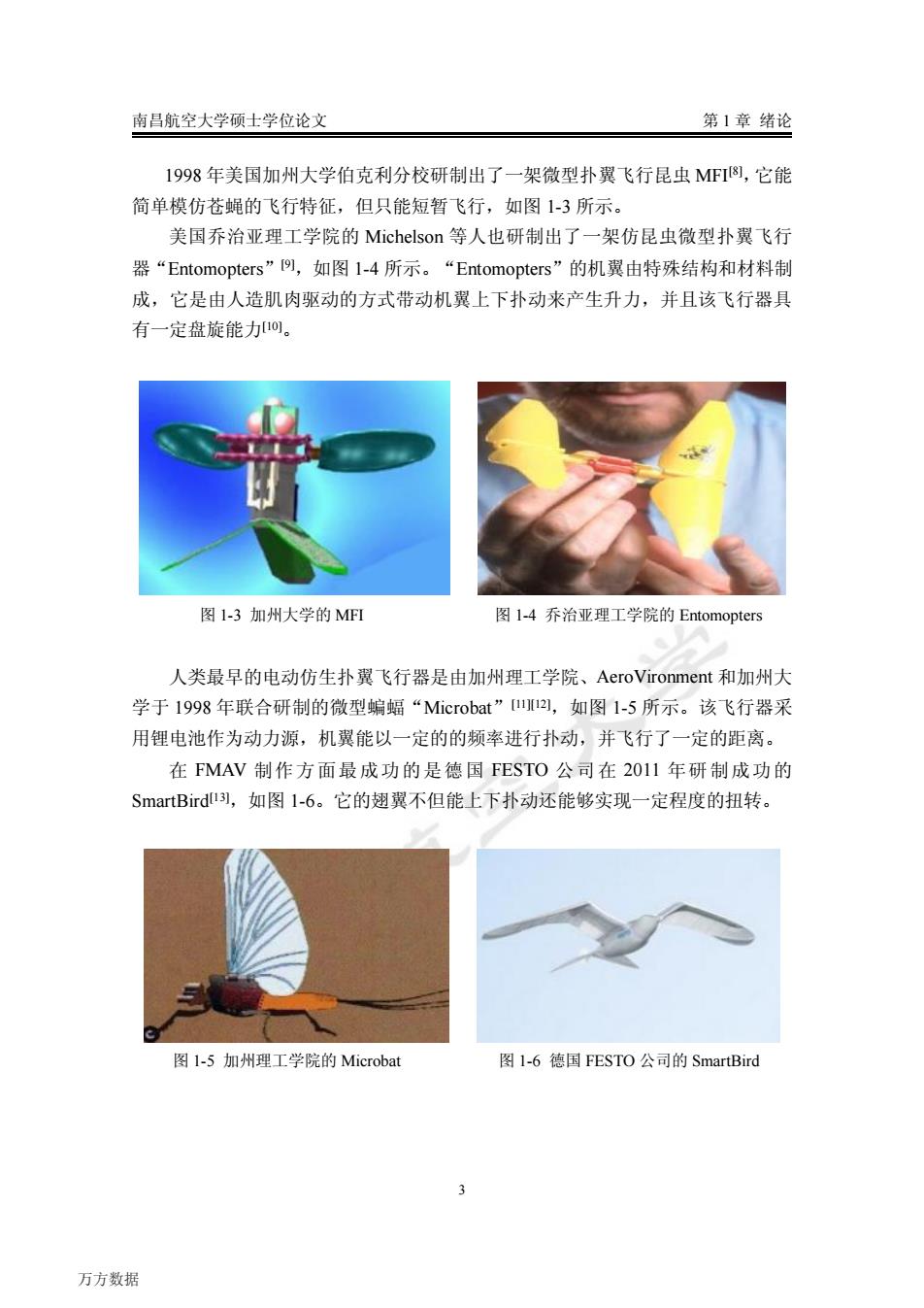
南昌航空大学硕士学位论文 第 1 章 绪论 3 1998 年美国加州大学伯克利分校研制出了一架微型扑翼飞行昆虫 MFI [8],它能 简单模仿苍蝇的飞行特征,但只能短暂飞行,如图 1-3 所示。 美国乔治亚理工学院的 Michelson 等人也研制出了一架仿昆虫微型扑翼飞行 器“Entomopters”[9],如图 1-4 所示。“Entomopters”的机翼由特殊结构和材料制 成,它是由人造肌肉驱动的方式带动机翼上下扑动来产生升力,并且该飞行器具 有一定盘旋能力[10]。 图 1-3 加州大学的 MFI 图 1-4 乔治亚理工学院的 Entomopters 人类最早的电动仿生扑翼飞行器是由加州理工学院、AeroVironment 和加州大 学于 1998 年联合研制的微型蝙蝠“Microbat”[11][12],如图 1-5 所示。该飞行器采 用锂电池作为动力源,机翼能以一定的的频率进行扑动,并飞行了一定的距离。 在 FMAV 制作方面最成功的是德国 FESTO 公司在 2011 年研制成功的 SmartBird [13],如图 1-6。它的翅翼不但能上下扑动还能够实现一定程度的扭转。 图 1-5 加州理工学院的 Microbat 图 1-6 德国 FESTO 公司的 SmartBird 万方数据