南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 相关研究表明:反齐默尔曼外形前缘的涡流在翼面上形成了有利干扰使得飞 机具有较高的升阻比和升力系数32。所谓反齐默尔曼形就是指机翼由两个半椭圆 在根弦的3/4处结合所形成的机翼形状。因此,关于翅翼平面的形状,本文选用反 齐默尔曼布局,如图2-2所示。 齐默尔曼布局 反齐默尔曼布局 图2-2仿生翅翼模型外形图 仿生翅翼有刚性翅翼和柔性翅翼两种,相关研究证明:柔性翅翼具有更好 的气动效率和飞行稳定性。为了保证翅翼具有足够的强度和刚度,本文采用了刚 性前缘,柔性后缘的扑翼模型,从而使得仿生翅翼既具有一定的刚性,又具有一 定的柔性,如图2-3所示。 后缘翅脉 柔性后缘 前缘翅脉 图2-3翅翼结构图 由图2-3可知:翅脉的材料应具有高强度、高疲劳极限等特点。参考机械设计 手册),翅脉可选用的材料有铝、不锈钢、钛合金和碳纤维等,如表2-2所示。 铝具有密度小、重量轻的优点,但刚性较差:不锈钢的强度和耐腐蚀性能好 但密度大:钛合金的密度小、强度高,但加工困难、成本较高;碳纤维具有低密 度、高强度、高弹性模量、抗腐蚀等性能,还具有纤维的柔曲性,因此本文设计 的仿生翅翼的翅脉采用碳纤维材料。 9 万方数据
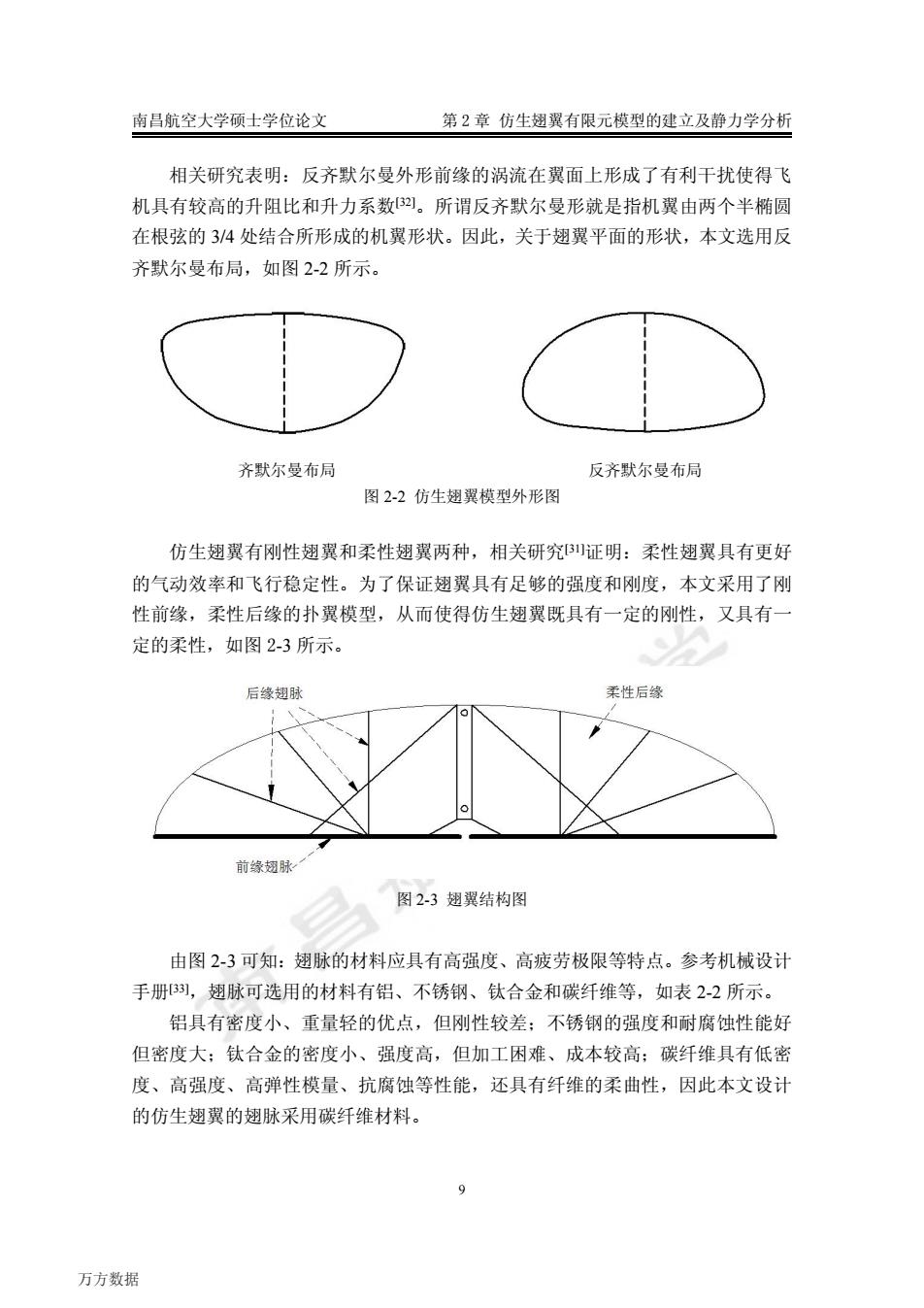
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 9 相关研究表明:反齐默尔曼外形前缘的涡流在翼面上形成了有利干扰使得飞 机具有较高的升阻比和升力系数[32]。所谓反齐默尔曼形就是指机翼由两个半椭圆 在根弦的 3/4 处结合所形成的机翼形状。因此,关于翅翼平面的形状,本文选用反 齐默尔曼布局,如图 2-2 所示。 齐默尔曼布局 反齐默尔曼布局 图 2-2 仿生翅翼模型外形图 仿生翅翼有刚性翅翼和柔性翅翼两种,相关研究[31]证明:柔性翅翼具有更好 的气动效率和飞行稳定性。为了保证翅翼具有足够的强度和刚度,本文采用了刚 性前缘,柔性后缘的扑翼模型,从而使得仿生翅翼既具有一定的刚性,又具有一 定的柔性,如图 2-3 所示。 图 2-3 翅翼结构图 由图 2-3 可知:翅脉的材料应具有高强度、高疲劳极限等特点。参考机械设计 手册[33],翅脉可选用的材料有铝、不锈钢、钛合金和碳纤维等,如表 2-2 所示。 铝具有密度小、重量轻的优点,但刚性较差;不锈钢的强度和耐腐蚀性能好 但密度大;钛合金的密度小、强度高,但加工困难、成本较高;碳纤维具有低密 度、高强度、高弹性模量、抗腐蚀等性能,还具有纤维的柔曲性,因此本文设计 的仿生翅翼的翅脉采用碳纤维材料。 万方数据

南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 表2-2各种翅脉材料性能比较 材料 铝 不锈钢 钛合金 碳纤维 性能 (LF6) (TAD (PAN基) 密度(gmm) 2500-2950 7750 4510 1750 弹性模量(Gpa) 67 186 110 220 拉伸强度(Mpa) 320 500 350-500 2.47 伸长率(%) 15 24 30 1.12 仿生翅翼的翅膜材料要求耐腐蚀、轻柔、强韧、能承受高频扑打而不失效等, 因此可供选择的材料有尼龙绸、锦丝绸、无纺布和塑料薄膜等,其中塑料薄膜柔 软、强度好、耐腐蚀和易加工,可供选择的大致有聚乙烯、聚氯乙烯、聚脂薄膜 和聚酰亚胺等几种,见表2-3。 表2-3各种塑料薄膜材料性能比较 材料 聚乙烯 聚氯乙烯 聚酯薄膜 聚酰亚胺 性能 (PE) (PVC) (PETP) (PD) 密度(gmm) 910-925 1300-1580 1370-1380 1340-1600 弹性模量(Gpa) 7-24 45-50 57 80-100 拉伸强度Mpa) 0.12-0.95 3.3 2.8 2.8 伸长率(%) 60-650 20-40 50-300 70-150 根据表2-3中各材料的特性,仿生翅膜选用聚酯薄膜材料。由式(2-1)和(2-3) 可知,根据仿生学公式计算得到的仿生翅翼的翼展b=933mm,展弦比=6.187,则 弦长c=/b=150mm。 考虑到后期设计、校核等因素的误差影响,实际制作的仿生翅翼的翼展b为 1000mm,实际的弦长c为220mm,则实际的翼面积S=2×1/4×π×b/2×c=1.728×105 mm2,如图2-4所示。 (a) 万方数据
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 10 表 2-2 各种翅脉材料性能比较 性能 材料 铝 (LF6) 不锈钢 钛合金 (TAI) 碳纤维 (PAN 基) 密度(g/mm3) 2500-2950 7750 4510 1750 弹性模量(Gpa) 67 186 110 220 拉伸强度(Mpa) 320 500 350-500 2.47 伸长率(%) 15 24 30 1.12 仿生翅翼的翅膜材料要求耐腐蚀、轻柔、强韧、能承受高频扑打而不失效等, 因此可供选择的材料有尼龙绸、锦丝绸、无纺布和塑料薄膜等,其中塑料薄膜柔 软、强度好、耐腐蚀和易加工,可供选择的大致有聚乙烯、聚氯乙烯、聚脂薄膜 和聚酰亚胺等几种,见表 2-3。 表 2-3 各种塑料薄膜材料性能比较 性能 材料 聚乙烯 (PE) 聚氯乙烯 (PVC) 聚酯薄膜 (PETP) 聚酰亚胺 (PI) 密度(g/mm3) 910-925 1300-1580 1370-1380 1340-1600 弹性模量(Gpa) 7-24 45-50 57 80-100 拉伸强度(Mpa) 0.12-0.95 3.3 2.8 2.8 伸长率(%) 60-650 20-40 50-300 70-150 根据表 2-3 中各材料的特性,仿生翅膜选用聚酯薄膜材料。由式(2-1)和(2-3) 可知,根据仿生学公式计算得到的仿生翅翼的翼展 b=933mm,展弦比λ=6.187,则 弦长 c=λ/b=150mm。 考虑到后期设计、校核等因素的误差影响,实际制作的仿生翅翼的翼展 b 为 1000mm,实际的弦长 c 为 220mm,则实际的翼面积 S=2×1/4×π×b/2×c=1.728×10 5 mm2,如图 2-4 所示。 (a) 万方数据
南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 (b) 图2-4实际制作的仿生翅翼 拍打幅值是微型扑翼飞行器的一个重要运动参数。拍打幅值越大,产生的 升力和推力也就越大,0max一般在90°至120°之间。鸟类在中速和快速飞行时,0 一般为60°,甚至更小:而在悬停状态,0一般为120°。因此初步设计仿生扑翼飞 行器以中速飞行,故取0为60°。 鸟类和昆虫都属于低雷诺数范畴,其雷诺数在102到104之间。因此,采用扑 翼布局是解决在飞行器低雷诺数下飞行难点的一种较好方案34。参照Ellington的 定义[3刿,鸟类飞行的雷诺数为: R- CV Ofb2 vv以 (2-6) 式中c(c=b/)为翅膀的平均弦长;7(下=0b)为扑翼的平均翼尖速度:0为扑 打幅度:v为运动粘度,常温下v=1.6×104ms。 将前面计算得到的各项参数代入式(26)中,得R=亚_奶 =6542<104,表 明本课题所研究的仿生微型扑翼飞行机器的雷诺数量级位于104以下,该计算也验 证了该仿生翅翼的合理性。 2.3有限元理论 ANSYS是一个用于设计分析及优化的大型通用有限元分析软件,包括从简 单的线性静态分析到复杂的非线性动态分析3。ANSYS分析过程包括创建有限元 模型、施加载荷求解和查看分析结果三个步骤。 有限元模型(Finite Element Model)是进行有限元分析的计算模型,它为有 万方数据
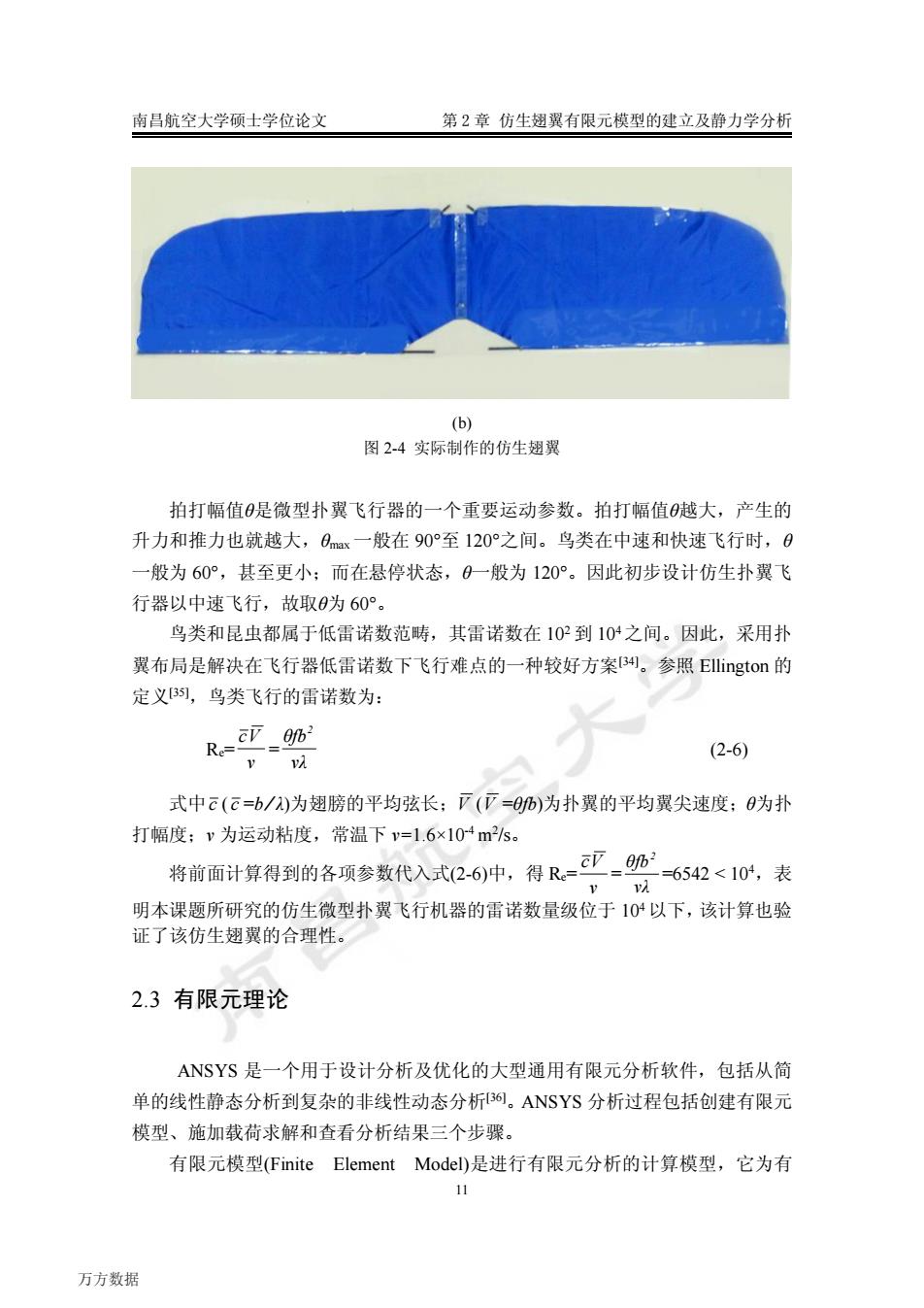
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 11 (b) 图 2-4 实际制作的仿生翅翼 拍打幅值θ是微型扑翼飞行器的一个重要运动参数。拍打幅值θ越大,产生的 升力和推力也就越大,θmax 一般在 90°至 120°之间。鸟类在中速和快速飞行时,θ 一般为 60°,甚至更小;而在悬停状态,θ一般为 120°。因此初步设计仿生扑翼飞 行器以中速飞行,故取θ为 60°。 鸟类和昆虫都属于低雷诺数范畴,其雷诺数在 10 2 到 10 4之间。因此,采用扑 翼布局是解决在飞行器低雷诺数下飞行难点的一种较好方案[34]。参照 Ellington 的 定义[35],鸟类飞行的雷诺数为: Re= v cV = vλ θfb 2 (2-6) 式中c ( c =b ∕ λ)为翅膀的平均弦长;V (V =θfb)为扑翼的平均翼尖速度;θ为扑 打幅度;v 为运动粘度,常温下 v=1.6×10 -4 m2 /s。 将前面计算得到的各项参数代入式(2-6)中,得 Re= v cV = vλ θfb 2 =6542 < 10 4,表 明本课题所研究的仿生微型扑翼飞行机器的雷诺数量级位于 10 4以下,该计算也验 证了该仿生翅翼的合理性。 2.3 有限元理论 ANSYS 是一个用于设计分析及优化的大型通用有限元分析软件,包括从简 单的线性静态分析到复杂的非线性动态分析[36]。ANSYS 分析过程包括创建有限元 模型、施加载荷求解和查看分析结果三个步骤。 有限元模型(Finite Element Model)是进行有限元分析的计算模型,它为有 万方数据

南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 限元计算提供了原始数据,是整个有限元分析过程的关键。有限元模型的建立过 程如图3-4所示37。 题定义 几何模型建立 单元特性定义 划分网格 模型检验 边界条件设定 计算 结果比较 模型修正 图2-5有限元分析的步骤 2.3.1 ANSYS的量纲以及参数确定 ANSYS有限元分析软件并没有指定的单位,在结构分析中只要保证输入的所 有数据的单位都是正在使用的同一套单位制里的单位即可[3839。 考虑到仿生翅翼的实际结构特征,将量纲统一为:长度单位(mm):力的单位 (N):质量单位(Tonne即10Kg):应力单位(MPa):密度单位(T/mm3)。 本文只考虑了几何线性的影响,并且假定结构在弹性范围内工作40。由第2 章可知,仿生翅翼的翅脉选用碳纤维材料,翅膜选用聚酯薄膜材料。由于鸟类翅 膀的骨骼是中空的,因此结合实际情况,本文选用管单元3D-Pipe288with2 nodes 来模拟仿生翅翼的翅脉,薄壳单元3D-Shell181with4 nodes来模拟仿生翅翼的翅 膜。 图2-6管单元Pipe288示意图 万方数据
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 12 限元计算提供了原始数据,是整个有限元分析过程的关键。有限元模型的建立过 程如图 3-4 所示[37]。 图 2-5 有限元分析的步骤 2.3.1 ANSYS 的量纲以及参数确定 ANSYS 有限元分析软件并没有指定的单位,在结构分析中只要保证输入的所 有数据的单位都是正在使用的同一套单位制里的单位即可[38][39]。 考虑到仿生翅翼的实际结构特征,将量纲统一为:长度单位(mm);力的单位 (N);质量单位(Tonne 即 10 3Kg);应力单位(MPa);密度单位(T/mm3)。 本文只考虑了几何线性的影响,并且假定结构在弹性范围内工作[40]。由第 2 章可知,仿生翅翼的翅脉选用碳纤维材料,翅膜选用聚酯薄膜材料。由于鸟类翅 膀的骨骼是中空的,因此结合实际情况,本文选用管单元 3D-Pipe 288 with 2 nodes 来模拟仿生翅翼的翅脉,薄壳单元 3D-Shell 181 with 4 nodes 来模拟仿生翅翼的翅 膜。 图 2-6 管单元 Pipe288 示意图 万方数据
南昌航空大学硕士学位论文 第2章仿生翅翼有限元模型的建立及静力学分析 二节点管单元Pipe288是一个具备张力压缩、弯曲和扭转功能的单轴单元,每 个节点具备6个自由度,即三个线位移和三个角位移,如图2-6所示。 四节点空间壳单元Sell181适于模拟线性、翘曲、厚度适中的壳体结构,每 个节点有6个自由度,即三个线位移和三个角位移,如图2-7所示。在ANSYS软 件中,若整个壳单元厚度一定,则只需输入一个厚度参数,若壳单元厚度有变化, 就需要同时输入四个厚度参数。 图2-7壳单元Shell181示意图 对选用单元设定物理参数,具体如下: 前缘翅脉:外径R1=4mm,壁厚h1=1.5mm: 后缘翅脉:外径R2=2mm,壁厚h2=0.5mm: 翅膜:厚度h=lmm; 翅脉弹性模量:E1=220GPa=2.2×10MPa: 翅脉密度:DENS1=1.75Kg/mm3=1.75×103T/mm3: 翅膜的弹性模量:E2=57GPa=57×105MPa: 翅膜密度:DENS2=137Kg/mm3=1.37×10-3T/mm3: 泊松比:μ=0.3; 2.3.2仿生翅翼的有限元网格划分 结合仿生翅翼的结构特征,翅脉采用自由划分方式;由于仿生翅翼的翅膜采 用薄壳单元,故翅膜部分采用四边形网格划分。为提高计算精度,将网格划分的 尺寸统一设置为2.5mm,划分网格后的有限元模型如图2-8所示。 13 万方数据
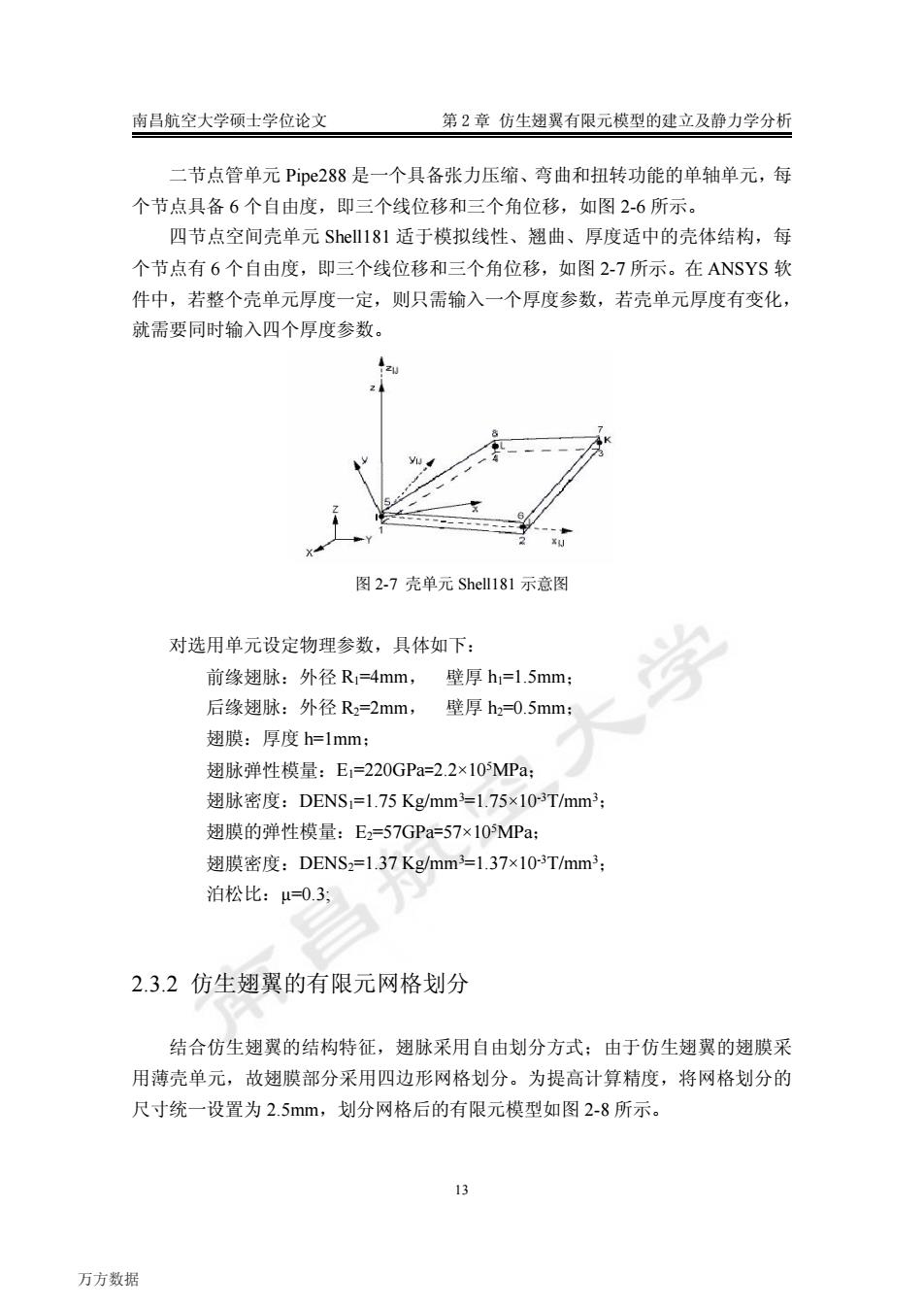
南昌航空大学硕士学位论文 第 2 章 仿生翅翼有限元模型的建立及静力学分析 13 二节点管单元 Pipe288 是一个具备张力压缩、弯曲和扭转功能的单轴单元,每 个节点具备 6 个自由度,即三个线位移和三个角位移,如图 2-6 所示。 四节点空间壳单元 Shell181 适于模拟线性、翘曲、厚度适中的壳体结构,每 个节点有 6 个自由度,即三个线位移和三个角位移,如图 2-7 所示。在 ANSYS 软 件中,若整个壳单元厚度一定,则只需输入一个厚度参数,若壳单元厚度有变化, 就需要同时输入四个厚度参数。 图 2-7 壳单元 Shell181 示意图 对选用单元设定物理参数,具体如下: 前缘翅脉:外径 R1=4mm, 壁厚 h1=1.5mm; 后缘翅脉:外径 R2=2mm, 壁厚 h2=0.5mm; 翅膜:厚度 h=1mm; 翅脉弹性模量:E1=220GPa=2.2×10 5MPa; 翅脉密度:DENS1=1.75 Kg/mm3=1.75×10 -3T/mm3; 翅膜的弹性模量:E2=57GPa=57×10 5MPa; 翅膜密度:DENS2=1.37 Kg/mm3=1.37×10 -3T/mm3; 泊松比:µ=0.3; 2.3.2 仿生翅翼的有限元网格划分 结合仿生翅翼的结构特征,翅脉采用自由划分方式;由于仿生翅翼的翅膜采 用薄壳单元,故翅膜部分采用四边形网格划分。为提高计算精度,将网格划分的 尺寸统一设置为 2.5mm,划分网格后的有限元模型如图 2-8 所示。 万方数据