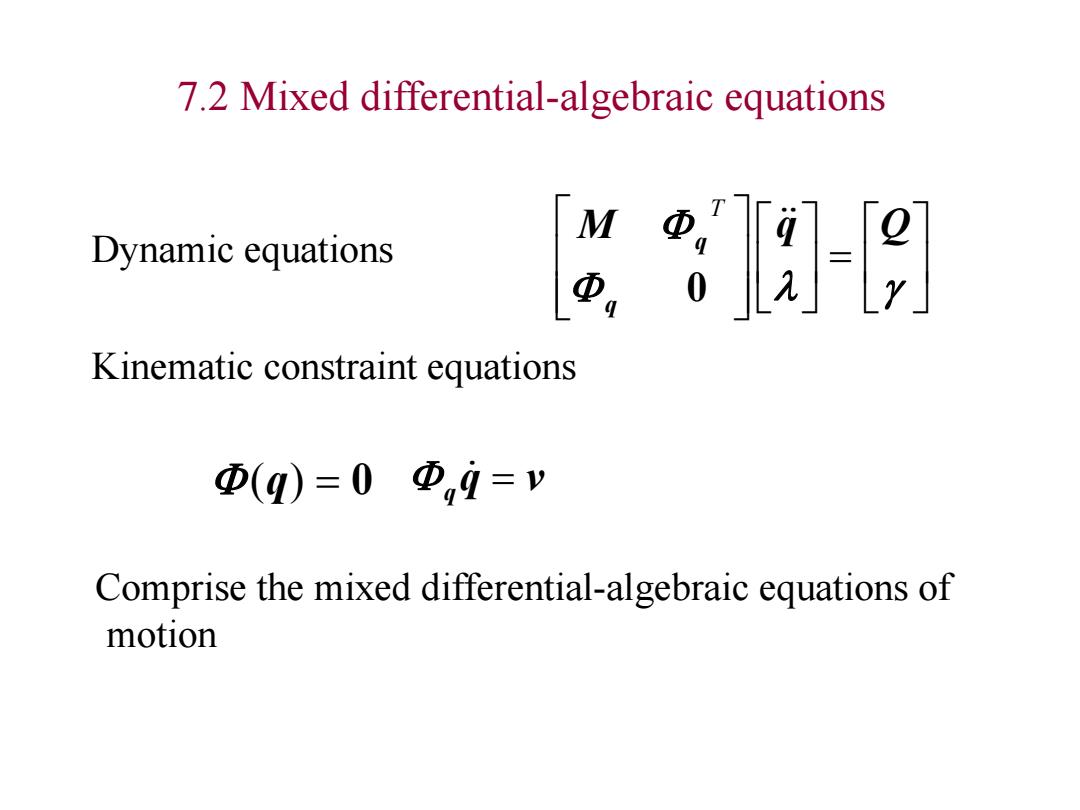
7.2 Mixed differential-algebraic equations M Dynamic equations 9 Kinematic constraint equations Φ(q)=0Φ,9=v Comprise the mixed differential-algebraic equations of motion
7.2 Mixed differential-algebraic equations Dynamic equations M q Q q q 0 T Kinematic constraint equations (q) 0 q v q Comprise the mixed differential-algebraic equations of motion
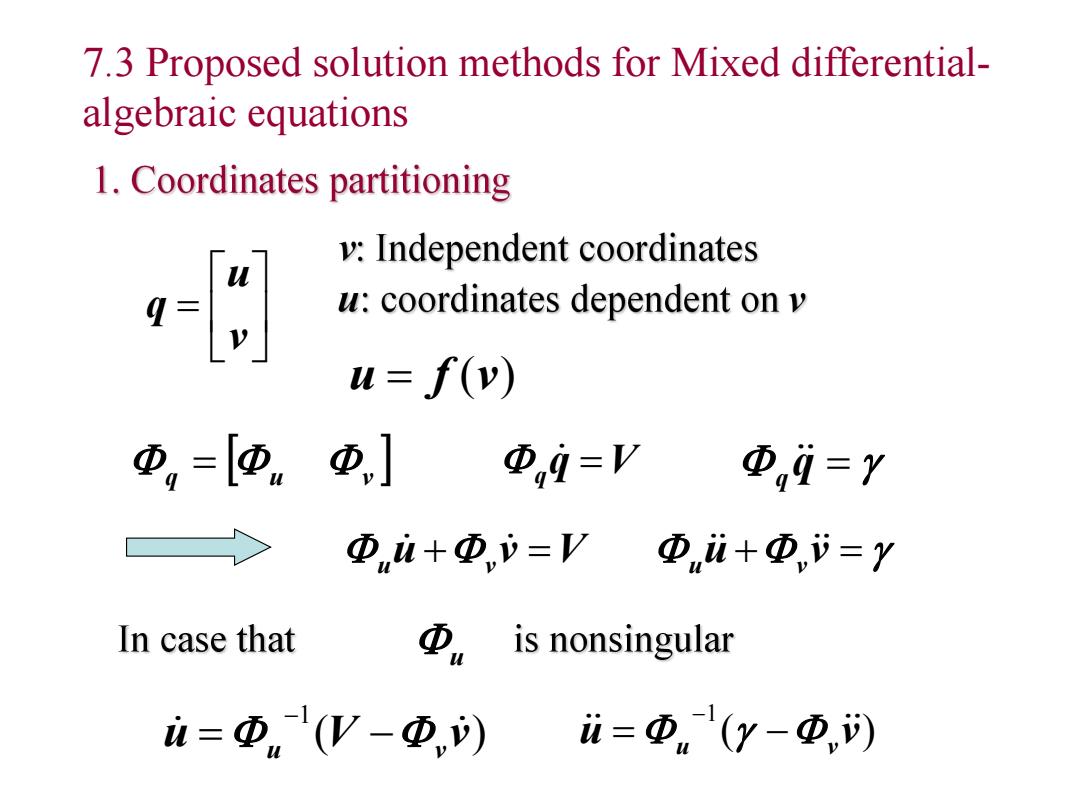
7.3 Proposed solution methods for Mixed differential- algebraic equations 1.Coordinates partitioning v:Independent coordinates g= u:coordinates dependent on v u=f(v) 功,=[ Φ] Φ4=V Φ,i=Y Φi+Φ=VΦi+Φ,i=Y In case that is nonsingular i=Φw(V-Φ) i=Φ(y-更)
7.3 Proposed solution methods for Mixed differential- algebraic equations v u q u q u v qq V q q uu v v V u v u v ( ) 1 u V v u v ( ) 1 u v u v u f (v)
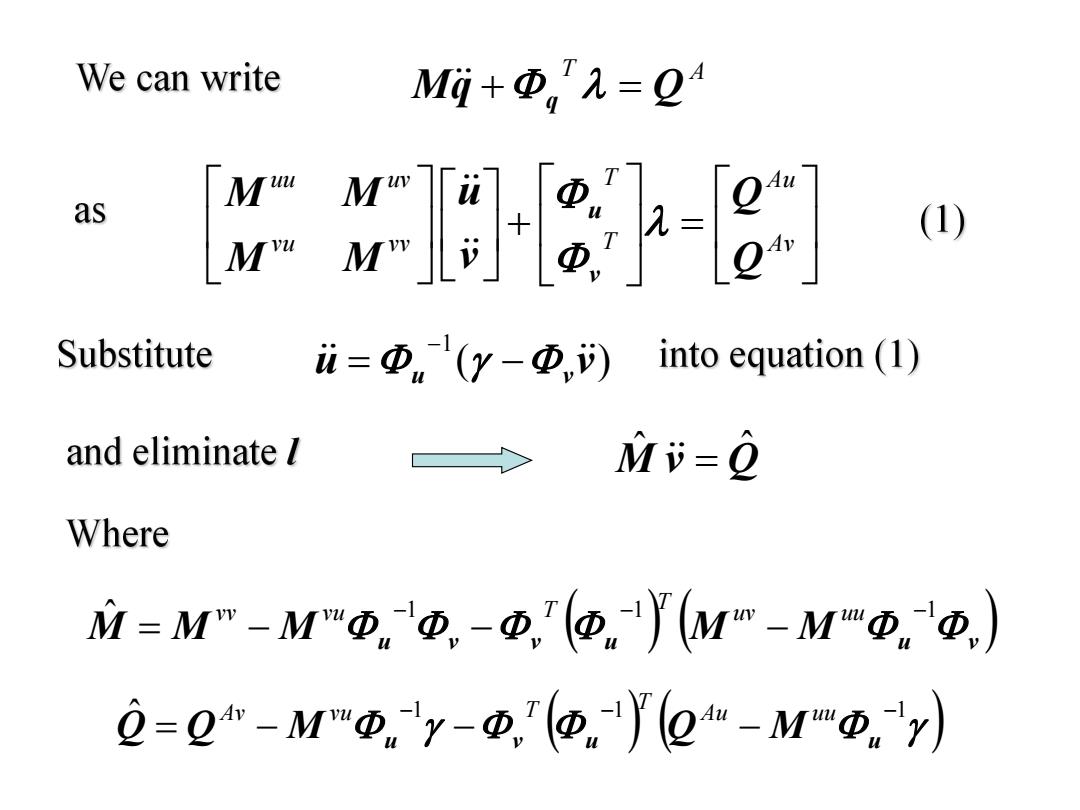
We can write M+Φ,=24 M as 如百®-8 (1) M Substitute i=Φn(y-Φ into equation (1) and eliminate M节=9 Where i=M"-M“D..-,7画.Y(M"-M"电.',) 2=g-M"更.y-更西yg-Mm中.y)
( ) 1 u v u v T A Mq q Q Av Au T T vu vv uu uv Q Q v u M M M M v u M ˆ v Q ˆ M M M u v v u M M u v 1 1 1 ˆ uv uu T vv vu T 1 1 1 ˆ Q Q M u v u Q M u Au uu T Av vu T
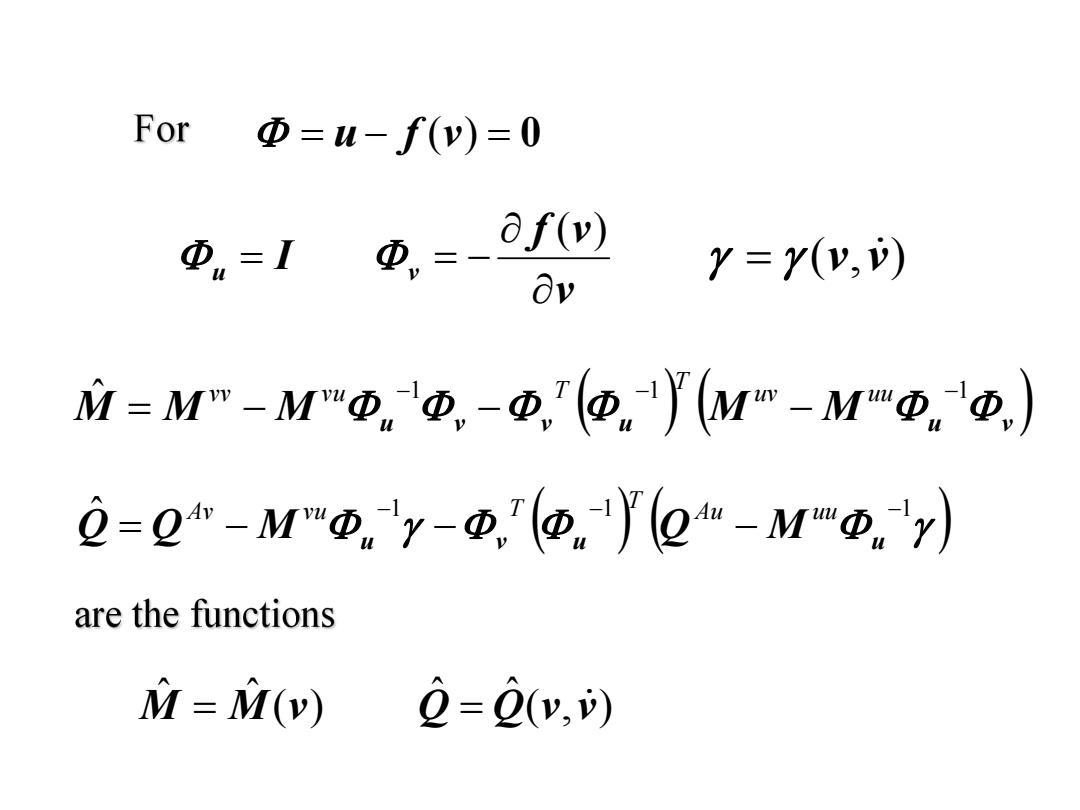
For Φ=u-f(v)=0 D=1D= of(v) Y=Y(v,v) Ov =M"-MmD.更,-更,西,y(Mm-M中.'o) ⑨=0-M更,y-更,西.y但-MΦy) are the functions M=M(v) 0=0(,)
u f (v) 0 I u M M M u v v u M M u v 1 1 1 ˆ uv uu T vv vu T 1 1 1 ˆ Q Q M u v u Q M u Au uu T Av vu T v f v v ( ) ( ) ˆ ˆ M M v ( , ) ˆ ˆ Q Q v v (v,v)
Step 1: For t=0v(0),(0) are given Solve u(0)=f(v(0) a(0)=af(0)0) 〉 (0),(0) Step 2: Solve M节=Q i =M-Q Step 3: Let S=V,P=少 5=r,r=M0 Integrate for one time step s(to)=v(to),r(to)=v(to)
( ) ( ), ( ) ( ) ˆ ˆ , 0 0 0 0 1 s t v t r t v t s r r M Q M ˆ v Q ˆ v Mˆ 1Qˆ s v,r v 0 t0 v(0), v(0) u(0) f (v (0)) (0) (0) ( ) (0) v v f v u u(0), u(0)