隐马尔科夫分类 26^6=308915776 ,图模型 a b 。利用马尔可夫模型,可 k 得已知观测样本时不同 序列的概率。 。通过动态规划方法通过 M 寻找最优路径获得最大 r 后验概率及与之对应的 V 序列。 Z
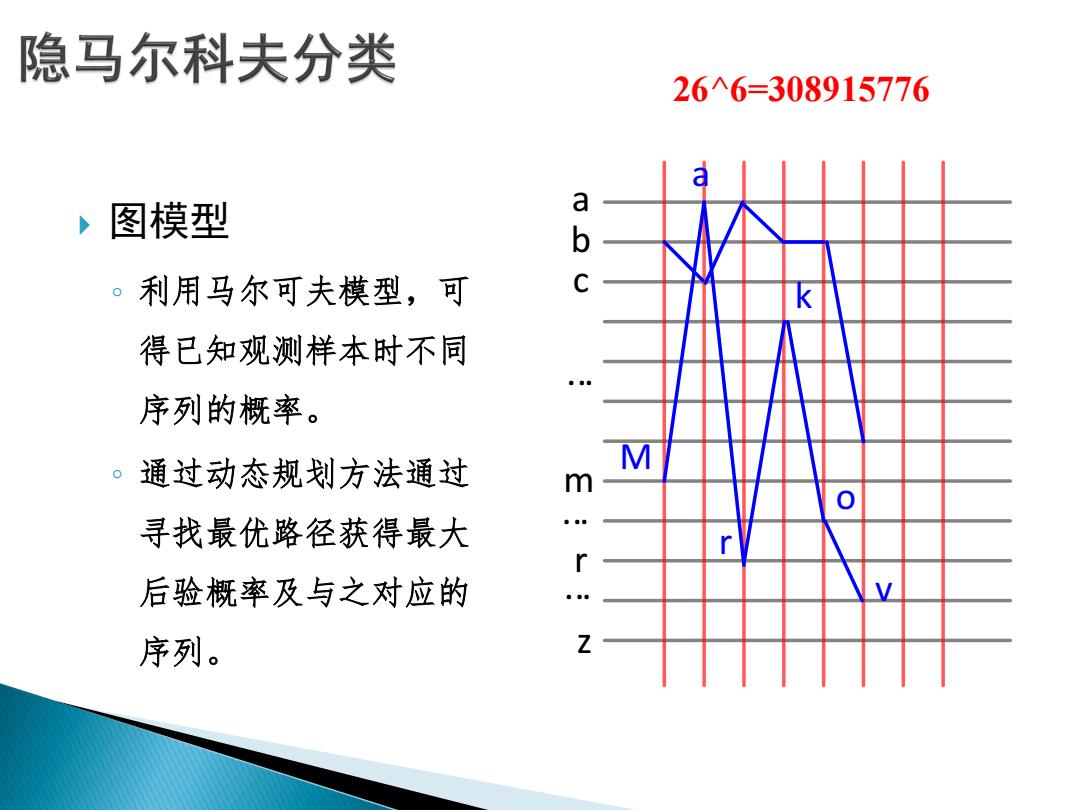
图模型 ◦ 利用马尔可夫模型,可 得已知观测样本时不同 序列的概率。 ◦ 通过动态规划方法通过 寻找最优路径获得最大 后验概率及与之对应的 序列。 a b c m z r ... ... ... M a r k o v 26^6=308915776
隐马尔科夫分类 ,动态规划模型 。动态规划图包含K各阶段,每各阶段由不同状态组成, 当前阶段状态可以转移到下一个阶段的任意状态。 。路径 ·不同阶段状态组成一条路径 r={S四→s2,,s}
动态规划模型 ◦ 动态规划图包含K各阶段,每各阶段由不同状态组成, 当前阶段状态可以转移到下一个阶段的任意状态。 ◦ 路径 不同阶段状态组成一条路径 [1] [2] [ ] ,..., K i i i r s s s
隐马尔科夫分类 阶段 1 2 K 漆 ,动态规划模型 % SIKI 。最优路径 W 的 ·代价函数最小/ 状态 Sm 4 大的路径为最优 S 路径。 s
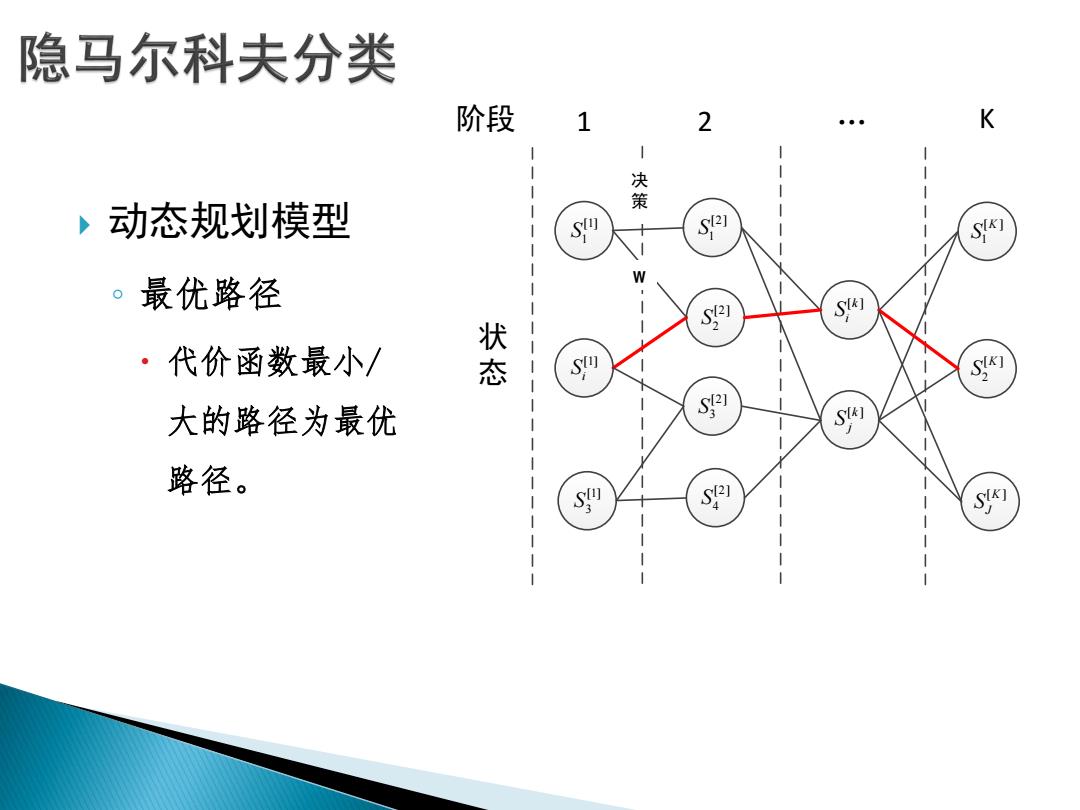
动态规划模型 ◦ 最优路径 代价函数最小/ 大的路径为最优 路径。 [1] i S [1] 1 S [1] 3 S [2] 2 S [2] 1 S [2] 4 S [ ] k i S [ ] k j S [ ] 2 K S [ ] 1 K S [ ] K J S [2] 3 S 阶段 1 2 … K 状 态 决 策 w
隐马尔科夫分类 ,最优化原理(bellman原理) 。A经过B到达C的最优路径等于A到B的最优路径串联B到C 的最优路径。 。B未知,则遍历其阶段所有状态,选择最优解。 =4y3c=gm+c刃
最优化原理(bellman原理) ◦ A经过B到达C的最优路径等于A到B的最优路径串联B到C 的最优路径。 ◦ B未知,则遍历其阶段所有状态,选择最优解。 [ 1] [ 1] [ 1 * [ 1] ] argmax k opt opt opt o k s pt opt k k A C A C s f f A s s C
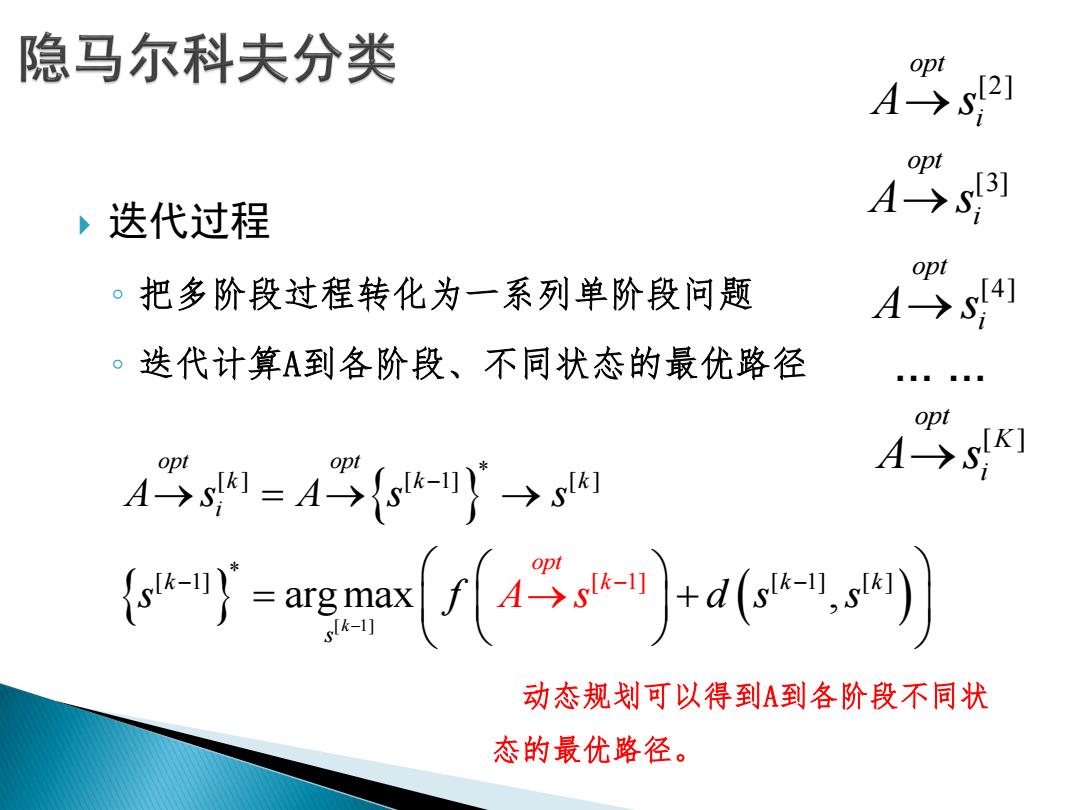
隐马尔科夫分类 opt opt ,迭代过程 A→5 opt 。把多阶段过程转化为一系列单阶段问题 A→S 。迭代计算A到各阶段、不同状态的最优路径 opt 43s=A{s-"y→s =ga(e】 动态规划可以得到A到各阶段不同状 态的最优路径
迭代过程 ◦ 把多阶段过程转化为一系列单阶段问题 ◦ 迭代计算A到各阶段、不同状态的最优路径 [ 1] * [ 1] [ ] [ 1] [ ] * [ 1] [ 1] [ ] arg max , k opt opt k k k i k k k s opt k A s A s s s f d A s s s [2] opt A s i [3] opt A s i [4] opt A s i ... ... [ ] opt K A s i 动态规划可以得到A到各阶段不同状 态的最优路径