② X0=x1,y0=y1 dem dem dyl 若:dem>SL连线 1,y1)→2,J2 若:dem<SLtx=x+dem*cos(ang 实线段 的终点 ty =yo+dem *sin(ang) 连线(心1,y7)→(c,) 实线段 dem-dem+dkl 的起点 若:dem>SL返▣ 若:dem<SL x=xo+dem cos(ang) y1-yo+dem sin(ang) 返回②
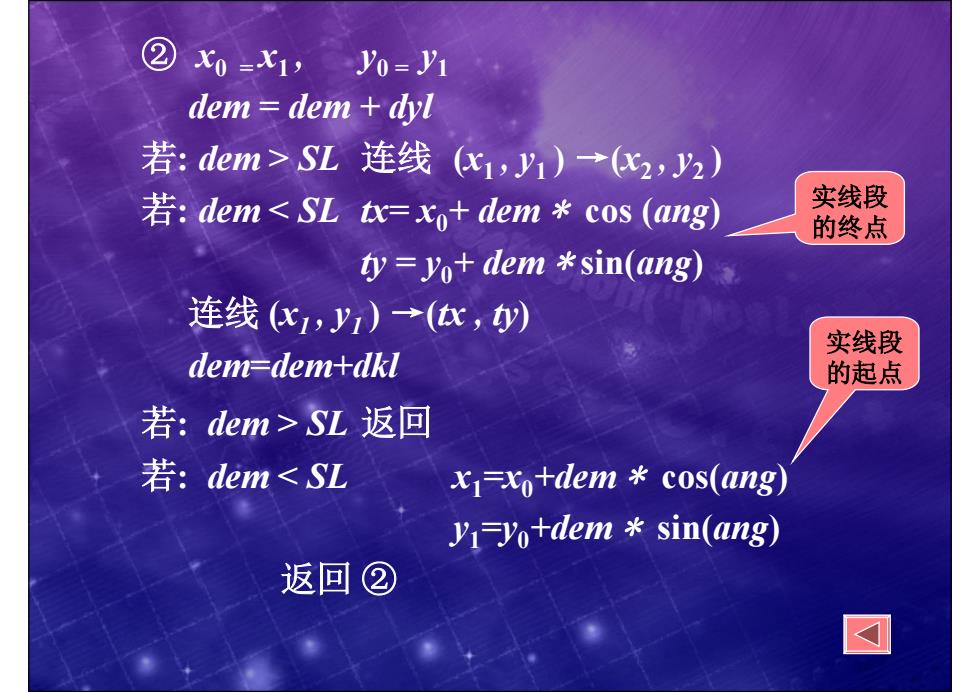
② x0 = x1 , y0 = y1 dem = dem + dyl 若: dem > SL 连线 (x1 , y1 ) →(x2 , y2 ) 若: dem < SL tx= x0+ dem * cos (ang) ty = y0+ dem * sin(ang) 连线 (x1 , y1 ) →(tx , ty) dem=dem+dkl 若: dem > SL 返回 若: dem < SL x1=x0+dem * cos(ang) y1=y0+dem * sin(ang) 返回 ② 实线段 的终点 实线段 的起点
。点划线 (×2,y2) (tx,ty)· dkl ang (×1,y1) ◆颜色 ●取决于光栅扫描系统可以提供的颜色
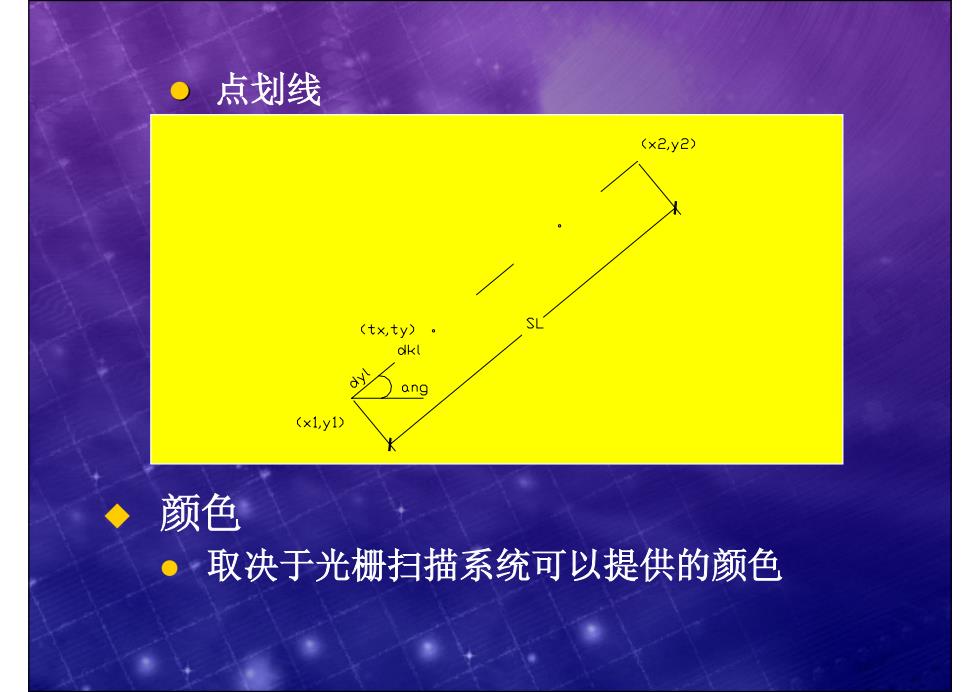
颜色 z 取决于光栅扫描系统可以提供的颜色 z 点划线

直线和直线图形: 3.直线图形 折线集 ● Pline (n,wpoint) ◆ 矩形 两点式 点差式 矩形网格 正多边形 标高线 教材:P56 尺寸线
直线和直线图形: 3. 直线图形 折线集 z Pline (n, wpoint) 矩形 z 两点式 z 点差式 矩形网格 正多边形 标高线 尺寸线 教材:P56
矩形 ◆矩形的生成按输入变量分类,有两种形式: 两点式 已知:两个角点坐标P1、P3; 矩形与水平轴的夹角ang 思路:求出P2、P4点的坐标,依次连接P、 P、P3、P4各点。 > 设:Cs=cos(ang),Sn=sin(ang dx P3x Cs+P3ySn-pixCs-P1ySn ◇0 dy =P3x Sn +P3y Cs pixSn-P1yCs dy dx ang 2x=dx Cs +pix P P 4x=-dy Sn +p1x 2v dx Sn +piv P 4y=dy Cs +piy
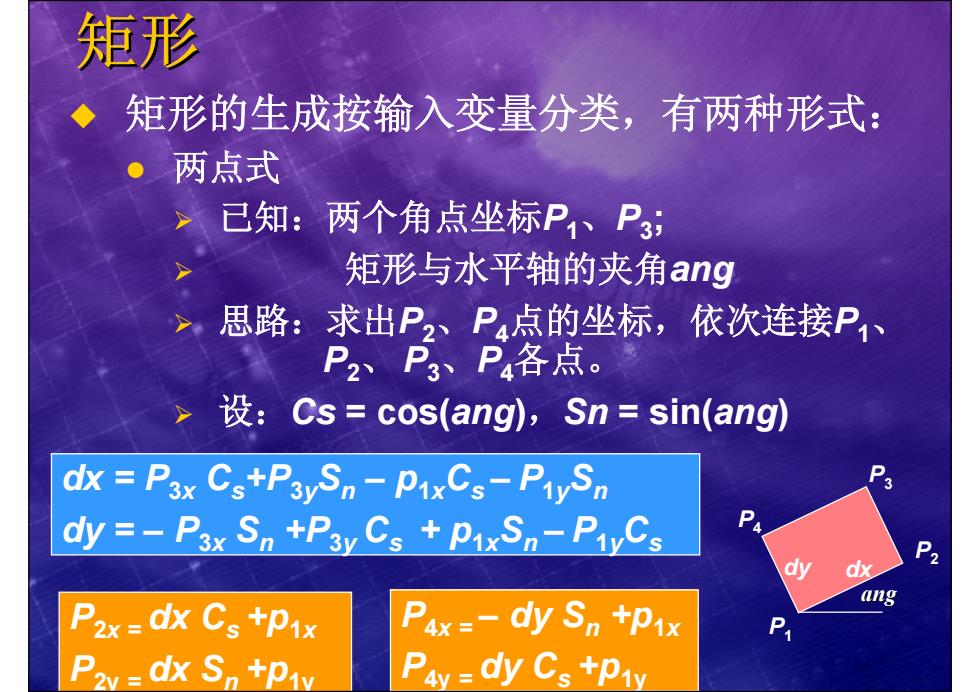
矩形 矩形的生成按输入变量分类,有两种形式: z 两点式 ¾ 已知:两个角点坐标P1、P3; ¾ 矩形与水平轴的夹角ang ¾ 思路:求出P2、P4点的坐标,依次连接P1、 P2、 P3、P4各点。 ¾ 设:Cs = cos(ang),Sn = sin(ang) dx = P3x Cs+P3ySn – p1xCs – P1ySn dy = – P3x Sn +P3y Cs + p1xSn – P1yCs P2x = dx Cs +p1x P2y = dx Sn +p1y P4x = – dy Sn +p1x P4y = dy Cs +p1y P1 P2 P3 P4 ang dy dx

点差式 已知: 矩形左下角点坐标P: 边长dx、dy 矩形与水平轴的夹角ang > 思路:求出P2、P3、P4点的坐标,依次连 接P1、P2、P3、P4各点
z 点差式 ¾ 已知: 矩形左下角点坐标 P 1 ; 边长dx 、 dy 矩形与水平轴的夹角ang ¾ 思路:求出 P2 、 P3 、 P4点的坐标,依次连 接 P 1 、 P2 、 P3 、 P4各点