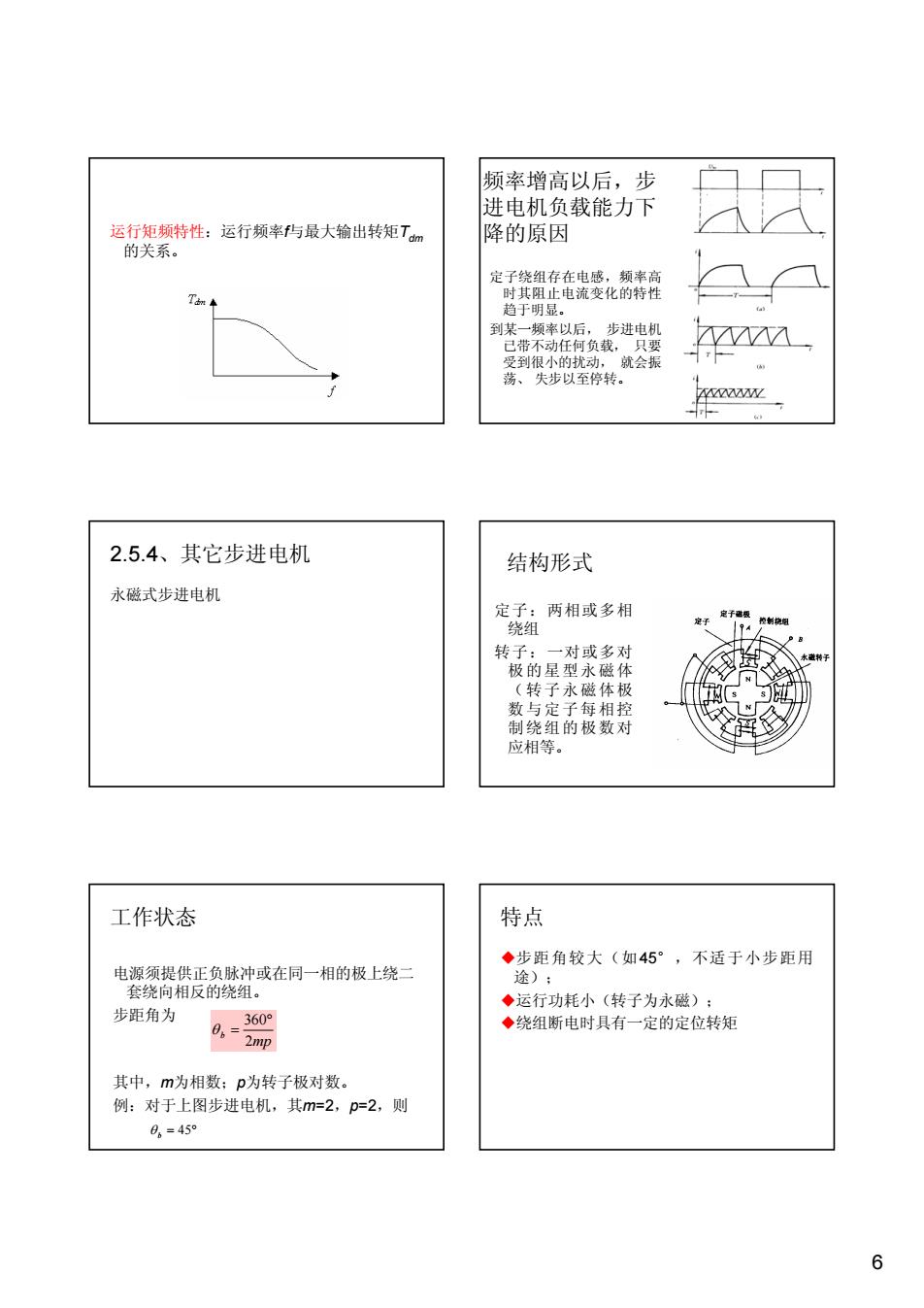
频率增高以后,步 进电机负载能力下 运行矩频特性:运行频率f5最大输出转矩Tm 降的原因 的关系。 定子绕组存在电感,频率高 时其阻止电流变化的特性 趋于明显。 到某一频率以后,步进电机 已带不动任何负载,只要 受到很小的扰动,就会振 荡、失步以至停转。 WW 2.5.4、其它步进电机 结构形式 永磁式步进电机 定子:两相或多相 绕组 定了 转子:一对或多对 极的星型永磁体 (转子永磁体极 数与定子每相控 制绕组的极数对 应相等。 工作状态 特点 ◆步距角较大(如45°,不适于小步距用 电源须提供正负脉冲或在同一相的极上绕二 途); 套绕向相反的绕组。 ◆运行功耗小(转子为永磁): 步距角为 360° 0。= ◆绕组断电时具有一定的定位转矩 2mp 其中,m为相数:p为转子极对数。 例:对于上图步进电机,其m=2,p=2,则 0。=45° 6
6 运行矩频特性:运行频率f与最大输出转矩Tdm 的关系。 频率增高以后,步 进电机负载能力下 降的原因 定子绕组存在电感,频率高 时其阻止电流变化的特性 趋于明显。 到某一频率以后, 步进电机 已带不动任何负载, 只要 受到很小的扰动, 就会振 荡、 失步以至停转。 2.5.4、其它步进电机 永磁式步进电机 结构形式 定子:两相或多相 绕组 转子:一对或多对 极的星型永磁体 (转子永磁体极 数与定子每相控 制绕组的极数对 应相等。 工作状态 电源须提供正负脉冲或在同一相的极上绕二 套绕向相反的绕组。 步距角为 其中,m为相数;p为转子极对数。 例:对于上图步进电机,其m=2,p=2,则 mp b 2 360° θ = = 45° θ b 特点 步距角较大(如45°,不适于小步距用 途); 运行功耗小(转子为永磁); 绕组断电时具有一定的定位转矩

永磁感应式步进电机 2.5.5、步进电机的驱动电路 在永磁和变磁阻原理共同作用下运转,不展 开讨论。 步进电机与驱动电源是一个不可 分开的有机整体,步进电机系统 的性能除了与电机本身的性能有 关外,在很大程度上取决于所使 用的驱动电源的类型与优劣。 步进电机驱动电路的功能 驱动电路功能方块图 功率放大解 步进账冲 A 功放电略 神分配 功放大的作 B 功放电略 三相步进 负能 用:对各相酥 冲信号进行功 方南电平 功放电路 平近大,使之 直流电源 机 分配最 功率电澜 毫安 一相绕组都要 用一个单独的 功放电路为其 振荡 分配 功率 步进电 脉冲分配的作用:接收时钟陈冲信号和方向屯 平,将单路脉冲转换为多相循环变化的脉冲。 供电。 源 器 驱动 机 方南电平=of几几几几几 r 方向电平1 A■□ A■■ B几 B- 步进电机对驱动电路的要求(1) 步进电机对驱动电路的要求(2) (1)在通电周期内能提供足够大的矩形波或接近 (2)驱动电路效率高、功耗小。 矩形波的电流。 所串联的电阻能使时间常数减小,但增加热损 步进电机对电源而言是一感性负载。负载存在 耗,因此,应考虑驱动电路既能保证步进电机 电感时,有反电势产生,电流不可能突然建立或 有良好的性能,又要损耗小。 消失。当通电时,电流按指数规律上升,即 0-e%) (3)驱动电路运行可靠、稳定,便于维修。 i=. 地机组 R+r 功率电机的电感尤其大,在断电瞬间,电机绕组 两端会产生很高的反向感应电势(有时高达数百 其中,电路时间常数 L T= 伏),若元件不可靠,容易击穿。 R+r 衰减时,也如此逐渐过渡。 7
7 永磁感应式步进电机 在永磁和变磁阻原理共同作用下运转,不展 开讨论。 2.5.5、步进电机的驱动电路 步进电机与驱动电源是一个不可 分开的有机整体,步进电机系统 的性能除了与电机本身的性能有 关外,在很大程度上取决于所使 用的驱动电源的类型与优劣。 驱动电路功能方块图 步进电机驱动电路的功能 毫安 → 安 f A B C 脉 冲 分 配 器 功放电路 三 相 步 进 电 机 负载 功率电源 分配器 电源 功放电路 功放电路 功率放大器 步进脉冲 方向电平 f A B C A B C 方向电平=0 f 方向电平=1 脉冲分配的作用:接收时钟脉冲信号和方向电 平,将单路脉冲转换为多相循环变化的脉冲。 功率放大的作 用:对各相脉 冲信号进行功 率放大,使之 有足够能力驱 动步进电机。 步进电机的每 一相绕组都要 用一个单独的 功放电路为其 供电。 步进电机对驱动电路的要求(1) 步进电机对电源而言是一感性负载。负载存在 电感时,有反电势产生,电流不可能突然建立或 消失。当通电时,电流按指数规律上升,即 (1 ) τ t e R r U i − − + = R r L + τ = (1)在通电周期内能提供足够大的矩形波或接近 矩形波的电流。 衰减时,也如此逐渐过渡。 其中,电路时间常数 步进电机对驱动电路的要求(2) (2)驱动电路效率高、功耗小。 所串联的电阻能使时间常数减小,但增加热损 耗,因此,应考虑驱动电路既能保证步进电机 有良好的性能,又要损耗小。 (3)驱动电路运行可靠、稳定,便于维修。 功率电机的电感尤其大,在断电瞬间,电机绕组 两端会产生很高的反向感应电势(有时高达数百 伏),若元件不可靠,容易击穿